基于UDE的船舶自动靠泊控制
2023-06-22徐云亮高迪驹殷非刘志全
徐云亮 高迪驹 殷非 刘志全

摘要:为解决船舶在外界扰动和模型不确定条件下自动靠泊控制精度降低的问题,基于不确定和扰动估计器(uncertainty and disturbance estimator, UDE),提出一种自适应反步控制方法。利用指令滤波器,抑制传统反步法虚拟控制求导产生的微分爆炸现象。通过设计辅助系统,补偿指令滤波器误差,达到三自由度船舶自动靠泊控制的目的。通过 Lyapunov理论证明UDE与控制器相结合的闭环系统的稳定性和信号的一致最终有界性。仿真实验表明,所设计的控制器能较准确地估计复杂扰动,并保证船舶到达期望的位置和艏向。
关键词:自动靠泊; 反步控制; 不确定和扰动估计器(UDE); 外界扰动; 模型不确定项
中图分类号: U664.82文献标志码: A
UDE-based automatic berthing control of ships
XU Yunliang1, GAO Diju1, YIN Fei2, LIU Zhiquan1
(1. Key Laboratory of Marine Technology and Control Engineering of Ministry of Transport,
Shanghai Maritime University, Shanghai 201306, China;
2. Shanghai Marine Equipment Research Institute, Shanghai 200031, China)
Abstract: To address the accuracy reduction problem of ship automatic berthing control under the conditions of external disturbances and model uncertainty, an adaptive backstepping control method based on the uncertainty and disturbance estimator (UDE) is proposed. The command filter is used to suppress the differential explosion caused by the virtual control derivation in the conventional backstepping, and an auxiliary system is designed to compensate the command filter error to realize the automatic berthing control of a three-degree-of-freedom ship. The stability and the uniformly final boundedness of signals of the proposed closed-loop system combining the UDE with the controller are demonstrated by Lyapunov theory. The simulation experiments show that the designed controller can accurately estimate the complex disturbances and ensure that the ship reaches the desired position and orientation.
Key words: automatic berthing; backstepping control; uncertainty and disturbance estimator (UDE); external disturbance; model uncertainty
0 引 言
隨着无人系统(无人汽车、无人机)的快速发展,船舶也向智能化方向演变,自动靠泊是《智能船舶发展行动计划》重点关注的核心技术[1]。船舶在靠泊过程中,复杂的交通环境以及风、浪、流等引起的未知外界扰动和模型不确定等因素,增加了自动靠泊控制的难度[2],使得船舶偏离靠泊轨迹的概率增大,甚至发生碰撞事故。因此,本文进一步研究外界扰动和模型不确定条件下船舶的自动靠泊控制方法,以期提高船舶自动靠泊控制的精度。
文献[3-6]通过迭代滑模、动态输出反馈控制、非线性神经网络控制等方法研究了欠驱动船舶的自动靠泊控制。文献[7]提出一种平行结构的人工神经网络,通过训练不同外界扰动、不同初始状态下的自动靠泊数据,得出最优的螺旋桨转速和舵角,分别控制船舶的推力和航向,实现自动靠泊控制。文献[8]利用自抗扰控制器中的扩张状态观测器估计外界扰动信息,设计自动靠泊控制器,提高系统的抗干扰性。文献[9] 利用非线性规划方法得到在风的干扰下,以时间最短为目标的自动靠泊路径,然后采用模型预测控制策略跟踪靠泊路径,实现以时间最短为目标的靠泊控制。然而,实际的靠泊环境复杂多变,除了考虑风浪引起的外界扰动因素外,同时考虑模型不确定性研究船舶自动靠泊控制问题更符合实际。有些情况下,船舶模型参数难以精确获得,可利用神经网络方法逼近模型的不确定项。为此,文献[10]设计了一种自适应神经网络控制器估计风浪引起的外界扰动和模型不确定项,增强系统的抗干扰性。文献[11]利用基于深度信息(deep-rooted information,DRI)的鲁棒神经网络自适应算法,在线估计外界扰动和模型不确定项,估计结果准确。上述方法采用神经网络方法估计外界扰动和模型不确定项要考虑控制器结构的复杂度和计算量,而基于不确定和扰动估计器(uncertainty and disturbance estimator,UDE)的控制是一种不需要线性化参数和外界扰动信息的控制方法。它对外界扰动和模型不确定项具有良好的估计性能,且控制结构简单。目前UDE已广泛应用于非线性控制系统[12]、网络化控制[13]和四旋翼无人机[14],但UDE在船舶自动靠泊控制中的应用较少。
為此,在外界扰动和模型不确定条件下,为解决船舶自动靠泊难以精确控制的问题,本文将UDE与反步法结合,采用指令滤波器解决反步法频繁求导所带来的计算量膨胀问题,并设计辅助系统补偿指令滤波器的输入输出误差,提出一种基于UDE的自适应反步控制方法。利用Lyapunov理论证明UDE与控制器相结合的闭环系统的稳定性,最后通过仿真验证控制方法的有效性。
1 问题描述
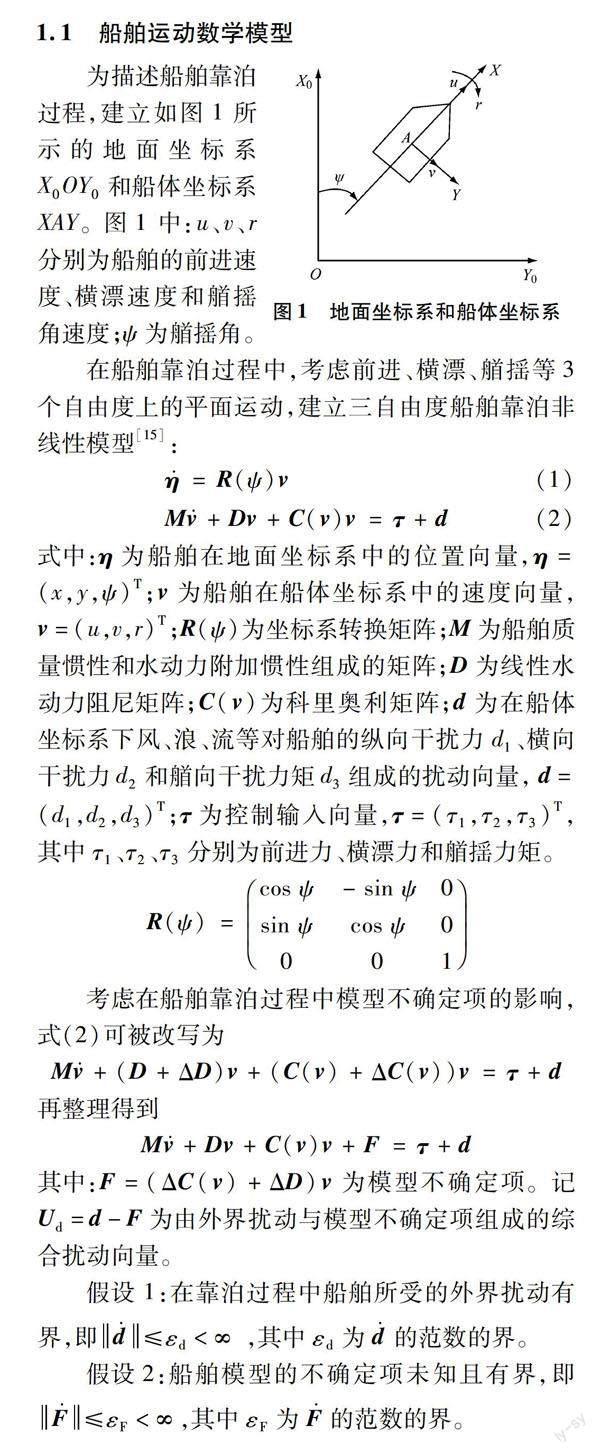
1.1 船舶运动数学模型
图3~9分别为在干扰条件1(幅值矩阵ρ=diag(2×105,2×105,2×105))下的仿真结果和在干扰条件2(幅值矩阵ρ=diag(2×106,2×106,2×106))即增大干扰后的仿真结果。表1为两种干扰条件下两种控制方法的稳态性能比较。
由图3可知,增大干扰前后,基于UDE的控制方法和基于DO的控制方法都可以控制船舶从初始位置(0,0,60°)到达距泊位点纵向距离约5倍船长、横向距离约7倍船长处[21](400 m,500 m,0°),完成靠泊任务。由图4可知,增大干扰前后,基于UDE的控制方法和基于DO的控制方法均可以让船舶无超调到达期望位置并且保持稳定,且基于UDE的控制方法收敛速度快。从图5可以看出,增大干扰前后,船舶在外界扰动和模型不确定条件下纵荡速度u、横荡速度v和艏揺角速度r的时间响应曲线均可以快速收敛到零。
由图6b可知,为在外界强干扰下使得船舶到达期望位置,两种控制方法的控制输入都出现一定波动,但由图7~9可知,在增大干扰后,UDE依然可以对外界扰动和模型不确定项进行估计并保持较小的估计误差。
由图7可知,在外界扰动与模型不确定项组成的复杂干扰下,基于DO的控制方法在靠泊初始阶段船舶速度波动比较大时不能完全估计外界扰动和模型不确定项,估计效果不理想,在船舶速度变化趋于平缓后可估计综合扰动。由图8可知,基于UDE的控制方法在靠泊初始阶段船舶速度波动比较大时能够同时估计外界扰动和模型不确定项,估计效果较好。从图9也可以看出,相较于基于DO的控制方法,基于UDE的控制方法估计误差小,最终表现出更好的控制效果。
采用时间与绝对误差乘积的积分值ITAE=∫t00t(t)dt描述两种控制方法的稳态性能,其中(t)为衡量指标每一时刻的误差,结果见表1。表1中xe、ye和ψe分别表示船舶位置和艏摇角跟踪误差。由表1可知,在增大干扰前后,基于UDE的控制方法的ITAE值都明显比基于DO的控制方法的小,说明基于UDE的控制方法具有较好的鲁棒性和稳态性能。
4 结 论
针对在外界扰动和模型不确定条件下船舶的自动靠泊问题,利用UDE估计外界扰动和模型不确定项,提出一种自适应反步控制方法。选取一艘供给船进行靠泊仿真,通过在不同扰动条件下与基于扰动观测器(DO)的控制方法的对比表明,所设计的控制方法能够估计外界扰动和模型不确定项并能以良好的控制性能完成自动靠泊任务,具有良好的鲁棒性。然而,本文为便于控制方法的设计,建模时在考虑模型不确定时对外界扰动进行了简单描述,在控制器设计中没有考虑执行器饱和、岸壁效应等因素的影响,这些都有待后续进一步研究。
参考文献:
[1]工业和信息化部, 交通运输部, 国防科工局. 智能船舶发展行动计划(2019—2021年)[EB/OL]. (2018-12-27)[2021-11-21]. http://www.gov.cn/xinwen/2018-12/30/content_5353550.htm.
[2]张强, 张显库. 船舶自动靠泊控制研究综述[J]. 大连海事大学学报, 2015, 41(3): 1-9. DOI: 10.16411/j.cnki.issn1006-7736.2015.03.001.
[3]ZHANG Y, HEARN G E, SEN P. A multivariable neural controller for automatic ship berthing[J]. IEEE Control Systems Magazine, 1997, 17(4): 31-45. DOI: 10.1109/37.608535.
[4]卜仁祥, 刘正江, 胡江强. 欠驱动船舶非线性滑模靠泊控制器[J]. 交通运输工程学报, 2007, 7(4): 24-29.
[5]张强. 船舶自动靠泊简捷非线性鲁棒控制[D]. 大连: 大连海事大学, 2018.
[6]IM N K, NGUYEN V S. Artificial neural network controller for automatic ship berthing using head-up coordinate system[J]. International Journal of Naval Architecture and Ocean Engineering, 2018, 10(3): 235-249. DOI: 10.1016/j.ijnaoe.2017.08.003.
[7]SHUAI Y H, LI G Y, CHENG X, et al. An efficient neural-network based approach to automatic ship docking[J]. Ocean Engineering, 2019, 191: 106514. DOI: 10.1016/j.oceaneng.2019.106514.
[8]PIAO Z J, GUO C, SUN S. Research into the automatic berthing of underactuated unmanned ships under wind loads based on experiment and numerical analysis[J]. Journal of Marine Science and Engineering, 2019, 7(9): 300. DOI: 10.3390/jmse7090300.
[9]MIZUNO N, UCHIDA Y, OKAZAKI T, et al. Quasi real-time optimal control scheme for automatic berthing[J]. IFAC-Papers Online, 2015, 48(16): 305-312. DOI: 10.1016/j.ifacol.2015.10.297.
[10]刘杨. 欠驱动水面船舶的非线性自适应控制研究[D]. 大连: 大连海事大学, 2010.
[11]ZHANG Q, ZHU G B, HU X, et al. Adaptive neural network auto-berthing control of marine ships[J]. Ocean Engineering, 2019, 177: 40-48. DOI: 10.1016/j.oceaneng.2019.02.031.
[12]REN B B, ZHONG Q C, DAI J G. Asymptotic reference tracking and disturbance rejection of UDE-based robust control[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3166-3176. DOI: 10.1109/TIE.2016.2633473.
[13]LI W H, QIN K Y, CHEN B W, et al. Passivity-based distributed tracking control of uncertain agents via a neural network combined with UDE[J]. Neurocomputing, 2021, 449: 342-356. DOI: 10.1016/j.neucom.2021.03.008.
[14]DHADEKAR D D, SANGHANI P D, MANGRULKAR K K, et al. Robust control of quadrotor using uncertainty and disturbance estimation[J]. Journal of Intelligent and Robotic Systems, 2021, 101: 60. DOI: 10.1007/s10846-021-01325-1.
[15]FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. 2nd ed. New Jersey: John Wiley & Sons, 2021: 25-26.
[16]ZHENG Z W, HUANG Y T, XIE L H, et al. Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5): 1851-1859. DOI: 10.1109/TCST.2017.2728518.
[17]KODHABDA A, TALOLE S E. Performance analysis of UDE based controllers employing various filters[J]. IFAC-Papers Online, 2016, 49(1): 83-88. DOI: 10.1016/j.ifacol.2016.03.033.
[18]SHEN Z P, WANG Y, YU H M, et al. Finite-time adaptive tracking control of marine vehicles with complex unknowns and input saturation[J]. Ocean Engineering, 2020, 198: 106089. DOI: 10.1016/j.oceaneng.2020.106980.
[19]FOSSEN T I, STRAND J P. Passive nonlinear observer design for ships using Lyapunov methods: full-scale experiments with a supply vessel[J]. Automatica, 1999, 35(1): 3-16. DOI: 10.1016/S0005-1098(98)00121-6.
[20]LIU Y, FU Y, HE W, et al. Modeling and observer-based vibration control of a flexible spacecraft with external disturbances[J]. IEEE Transactions on Industrial Electronics, 2019, 66(11): 8648-8658. DOI: 10.1109/TIE.2018.2884172.
[21]劉新召. 基于最优轨迹规划的船舶自动靠泊控制研究[D]. 大连: 大连海事大学, 2020.
(编辑 赵勉)
收稿日期: 2021-11-12
修回日期: 2022-02-24
基金项目: 国家自然科学基金(52001197);上海市科技创新行动计划 (21DZ1205800)
作者简介: 徐云亮(1996—),男,江苏淮安人,硕士研究生,研究方向为船舶运动控制,(E-mail)2742576953@qq.com;
高迪驹(1978—),男,浙江绍兴人,高级工程师,博士,研究方向为船舶电气自动化及智能控制,(E-mail)djgao@shmtu.edu.cn
