一种面向旋转空间站的绕月双曲交会导引控制方法
2023-06-21朱彬羽李海阳李兴永周晚萌
朱彬羽,李海阳,陆 林,李兴永,周晚萌
(1. 国防科技大学空天科学学院,长沙 410073;2. 空天任务智能规划与仿真湖南省重点实验室,长沙 410073;3. 中国航天员科研训练中心,北京 100094)
0 引 言
绳系卫星系统是指由空间系绳连接两个或多个空间设备所构成的系统,并以其独特优势得到广泛关注[1-7]。2019年,国内学者以绳系卫星为雏形,提出了一种部署于环月轨道附近的绳系旋转可重复利用运输系统的设计方案[8]。该运输系统由形似双向秋千的旋转空间站(简称旋转平台)、月面单级往返运输飞行器(简称登月舱)和地月往返航天器(奔月时称探测器,返回时称返回舱)构成。
空间站中央为平台核心,与质心重合。平台两端设置有勾环式对接机构(简称吊钩)。平台核心以环月速度v运行在距月面高度300 km的环月轨道上,通过长达300 km的轻质高强度吊绳连接两端机构,两端点绕核心以自转角速度ω=8.33×10-3rad/s与环月轨道近似同向旋转。吊钩通过对探测器进行钩取来实现“钓鱼式”交会对接。面向该空间站的绕月交会对接飞行阶段划分如图1所示。
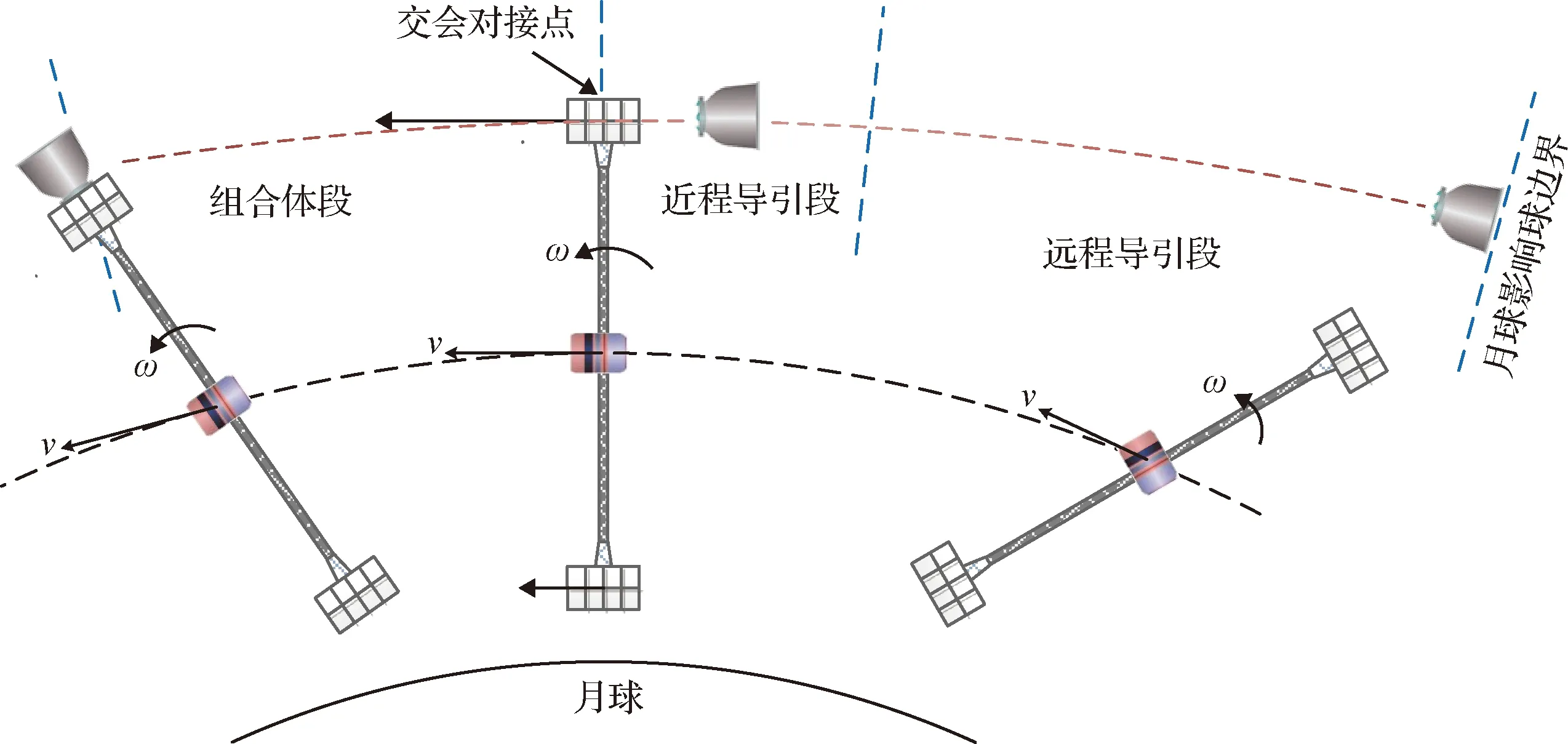
图1 绕月交会对接飞行阶段划分Fig.1 Flight phases of lunar rendezvous and docking
由于旋转平台远月端切向速度超过了月球逃逸速度,当探测器的绕月双曲轨道近月点与平台远月端的对接机构位置重合时,两者能够以相近的运动状态在预定时刻实现交会对接。区别于一般交会对接过程,该型空间站端点处的对接机构额外受到一个自转离心力。这导致从地球出发的探测器需要在不近月制动的条件下,在绕月双曲轨道上与平台端点实现无冲击交会对接,期间无法进行悬停与平移靠拢。因此有必要对绕月双曲交会导引过程中涉及的策略、控制等问题进行深入研究。
Clohessy等[9]提出了基于CW相对运动方程的近程导引法,在此基础上,后续的研究者不断对CW方程进行改进优化[10-14]。该导引方法适用于近圆轨道上合作与非合作目标的近距离交会过程,在实际工程中应用广泛。国内对空间交会导引问题的研究起步较晚,但发展迅速,在空间交会近远程导引的能耗问题与机动策略研究中,总结出一系列优化改良的导引方法[15-20]。在“天舟”、“嫦娥”系列任务[21-23]中,国内多种空间交会导引方法的研究成果得以成功实践。但针对诸如绳系卫星等特殊合作目标的新型绕月双曲交会对接方式的导引策略及方法,国内外研究还有所欠缺。
本文研究了绕月双曲交会近远程导引控制过程中涉及的动力学特征,并分阶段设计了不同的导引控制方法。首先,分析了绕月双曲交会的对接初始参数区间,给出了状态偏差的对接精度要求。然后,依据近程导引段动力学特性,研究了基于相平面开关控制法的导引律,并针对近程导引段设计了相平面开关制导控制器。再依据远程导引段共面偏差的演化特征,提出了基于偏差演化线性近似法进行脉冲修正的远程导引段共面制导控制方法。同时提出了基于阻尼振动形式控制加速度的异面偏差修正方法。仿真结果显示,该双曲交会导引控制方法具有精准可行、能耗成本很低的优势。
1 坐标系定义与简化动力学模型
1.1 相关坐标系定义
月心J2000.0坐标系oMxMyMzM各坐标轴指向与地心J2000.0坐标系相同,原点取月心oM。
空间站质心C的环月轨道惯性系oMx0y0z0的原点取月心oM,x0轴指向环月轨道相对于基准平面oMxMyM的升交点方向,z0轴指向环月轨道的角动量方向,y0轴与另外两轴垂直,构成右手系。x0轴与xM轴的夹角记为Ω0,环月轨道平面oMx0y0相对于基准平面oMxMyM的倾角记为i0。
空间站自转轨道惯性系oCxCyCzC的原点oC取空间站质心C,xC轴沿oC指向自转轨道相对于环月轨道平面oMx0y0的升交点方向,zC轴指向自转角动量方向,yC轴与另外两轴垂直,构成右手系。xC轴与x0轴的夹角记为ΩC,自转轨道平面oCxCyC相对于环月轨道平面oMx0y0的倾角记为iC。空间站自转角速度ωC与环月轨道角动量方向相近,指向环月轨道面正法向一侧。
目标体坐标系oPxPyPzP的原点oP与目标端点P固联,yP轴从P指向C,xP轴平行于目标端点体轴并指向前方,与P在oCxCyCzC中的运动速度方向一致,zP轴指向自转轨道平面oCxCyC法向,与另外两轴垂直,构成右手系。xP轴负方向与xC轴夹角记为fP。图2为目标体坐标系示意图。
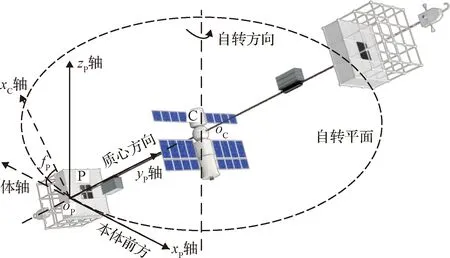
图2 目标体坐标系Fig.2 Target body-fixed coordinate system
预定交会对接时刻的瞬时目标体坐标系oTxyz的原点与坐标轴定义与该瞬时时刻下的oPxPyPzP系一致,oTxyz系为绝对惯性系。
1.2 轨道运动简化及相对动力学模型
旋转平台端点是交会对接任务中的导引目标,其轨道运动为环月近圆轨道运动与绕质心圆周运动的叠加。根据目标端点的轨道预报,探测器在近远程导引段指向预定的交会对接点实施导引控制。
在oTxyz系中,建立绕月双曲交会导引控制的相对动力学模型,并作出如下简化假设:
1) 旋转空间站的结构特性、轨道以及自转运动确定且几乎不受外部扰动影响,目标端点的运动状态只与时间相关。
2) 探测器在无控状态下,其质心的轨道运动与本体姿态运动相互独立,探测器姿态的稳定控制由其自身的姿控系统实现。假设探测器可以在保持绝对姿态不变的理想条件下施加控制力,不再对探测器的姿态控制进行讨论分析。
3) 相较于导引过程中的轨控推力,太阳光压、潮汐、非球形摄动等各项摄动力对轨道运动的影响可以忽略不计,在建立动力学方程时不予考虑。
(1)
探测器相对理想运动状态的简化动力学方程为
(2)

2 绕月双曲交会对接初始参数区间及任务分析
2.1 对接初始参数区间

(3)

在oTxyz系中,对接位置偏差矢量ρ的包络面为朝向y轴负方向的闭合半球面,其表达式为
(4)
式中:αR∈[180°, 360°)与βR∈[-90°, 90°]分别为ρ的方位角与俯仰角。

(5)

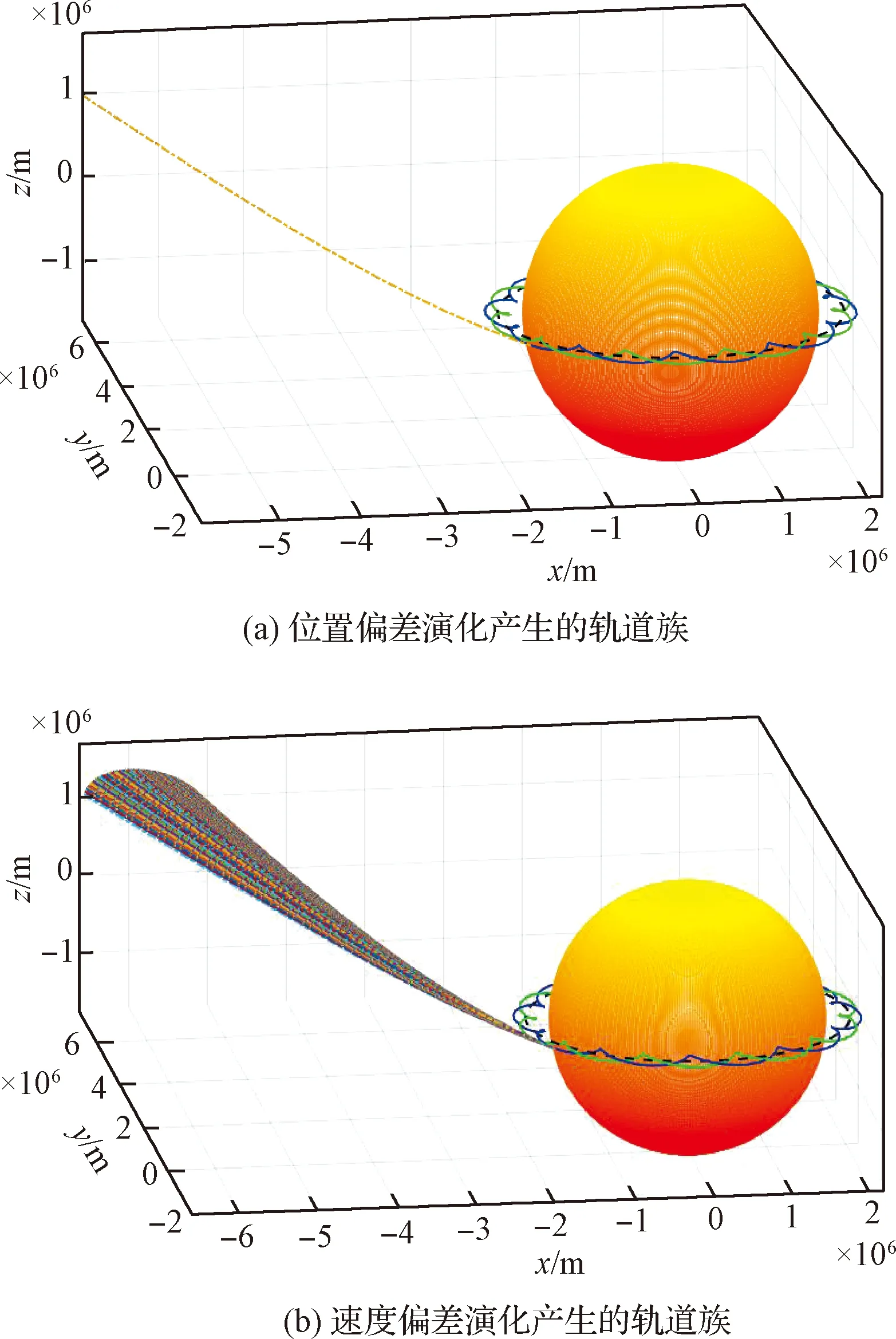
图3 两类偏差矢量包络面分别演化产生的双曲轨道族Fig.3 Hyperbolic orbit families generated by the evolution of two types of deviation vector envelope surfaces
图3(a)中位置偏差包络面逆向演化产生的双曲轨道族覆盖区域在视线上几乎与标称轨道重合,远小于图3(b)中速度偏差包络面逆向演化发散出的覆盖区域,说明对接初始参数区间内的位置偏差对月心段双曲轨道产生的扰动影响远小于速度偏差。
对两类对接偏差分别逆向演化产生的相对于标称轨道的偏差大小进行分析。在距离交会对接点200 km的位置,由5 m的对接位置偏差演化所产生的位置偏差达到约5.15 m速度偏差达到约0.002 m/s;由10 m/s的对接速度偏差演化所产生的位置偏差达到约1.31 km、速度偏差达到约9.09 m/s。
2.2 月心段导引任务需求分析
月心段导引任务主要是在不近月制动的前提下,以标称轨道为基准,对进入月球影响球的探测器先后实施远程导引和近程导引。根据2.1节对接初始参数区间及其逆向演化的数值分析,在考虑测量与系统时延在内的一定偏差余量后,要求对接位置偏差不大于4 m,要求交会末端速度偏差不大于8 m/s,并称其为可行对接初始参数区间。
以可行对接初始参数区间逆推至月球影响球形成的分布范围,作为探测器的可行进入区间,即远程导引段起点分布域。根据2.1节的分析,在实施近程导引控制时(通常距离目标200 km时启用),期望近程导引段、起点处的入轨位置偏差精度优于1 300 m,入轨速度偏差精度优于9 m/s。以标称轨道为基准,可以制定容许位置偏差较大的远程导引策略与容许偏差较小的近程导引策略。
3 近远程导引控制设计方法
针对近程导引距离短、时间紧、精度要求高的特点,采用连续推力条件下相平面开关控制法进行制导控制器设计。针对远程导引距离长、时间宽裕、精度要求低的特点,提出基于偏差演化线性近似法的脉冲修正控制。对可能存在的异面偏差,采用一种阻尼振动形式的控制加速度进行异面偏差修正。
3.1 基于相平面开关控制的近程导引段控制设计
采用相平面法对oTxyz系各轴向制导控制器进行设计,控制对象为δs沿各轴向的偏差分量。
为了在交会对接前,将探测器相对于标称轨道的状态偏差自动控制到满足对接精度要求的范围内,需要根据发动机比推力大小对近程导引段各轴向发动机控制开关的距离门限值d与速度门限值h进行合理设计。以x向运动状态为例,仅在比推力大小为ax的主动力反向作用下,状态偏差由相点(0,hx)转移至相点(dx, 0)的过程满足以下运动学规律:
(6)
在门限值dx与hx满足式(6)所表示关系的基础上,参考2.2节对接精度需求分析中提出的可行对接初始参数区间设计指标,确定dx的取值为4 m,hx的取值为1.264 9 m/s。
由于式(2)相对动力学方程各向不耦合,为保证相轨迹快速收敛,将相平面第一、第三象限开关曲线设计为符合运动学特征的抛物线,分别作为相平面控制开关曲线中的负开线和正开线;同时为了达到在满足对接精度的前提下尽可能节省燃料即降低发动机工作时间的目的,要求在第二、第四象限相轨迹穿过关机线后,能够在到达预定交会对接点的剩余时间Trest内,恰好以当前速度偏差回到纵轴附近。因此,本文将相平面第二、四象限的开关曲线主要设计为斜率为-1/Trest的斜直线,分别作为相平面控制开关曲线中的正关线和负关线,如图4所示。

图4 x向控制开关曲线Fig.4 Curve of x-direction control switch
x向负开线表达式为
(7)
x向负关线斜直线部分的表达式为
(8)

x向正开线表达式为
(9)
x向正关线斜直线部分的表达式为
(10)

y向与z向的相平面控制开关曲线设计方法及表达式与x向相同。
3.2 基于线性近似法的远程导引段共面制导控制
探测器自月球影响球边界沿标称轨道运动至预定交会对接点的月心段双曲轨道,外观近似为直线。为简化远程导引方程,采用模糊数学法对共面导引过程中需要控制的oTxy平面内偏差变量进行线性化处理。即运用线性状态转移方程来近似估算运动终端的共面偏差变量,并在瞄准运动终端位置偏差为零的约束下,解算中途修正点需要施加的共面脉冲冲量的偏差演化线性近似法。对于oTxy平面法向的异面微小扰动,可采用施加特殊控制加速度的方法使异面偏差实现收敛,后续章节将进行说明。
以月球影响球进入点的月心矢径和预定交会对接点的月心矢径的夹角为分段区间,将标称轨道按角度均分为3个阶段,如图5所示。其中第一阶段起点位于月球影响球边界处进入点,第三阶段导引终点为预定交会对接点。

图5 月心段标称轨道及远程导引阶段划分Fig.5 The trajectory and long-range guidance phases of nominal selenocentric segment
对于探测器在oTxyz系x,y轴两个方向上的状态偏差分量,借助状态转移矩阵进行线性化处理。设距离终点由远及近的各个阶段起始时间分别为ti(i=1, 2, 3),近程导引段终点时刻即预定交会对接时刻为tf。每个阶段均以tf时刻终点状态为瞄准点,自ti时刻状态偏差转移至tf时刻状态偏差的状态转移关系由二体轨道动力学模型确定。本文采用线性状态转移矩阵近似描述这个关系。
仅考虑x,y两个共面方向的状态偏差表示为δη(t),其中t表示时间。建立由ti时刻状态偏差映射到tf时刻状态偏差的线性演化关系如下:
(11)


(12)
将δηk(ti)与δηk(tf)代入式(11)建立起16个方程,求得反映由ti时刻标称轨道附近任意偏差量映射到tf时刻标称轨道附近任意偏差量的线性关系的状态转移矩阵Ai,f为
Ai,f=
(13)
对Ai,f的有效性进行验证,即在ti时刻设置几组偏差点,研究其状态偏差δη(ti)分别通过Ai,f映射到tf时刻的状态偏差δηlin(tf)与通过二体模型预报得到的tf时刻状态偏差δηkpl(tf)的相对误差百分比。一般认为两个方向上位置偏差分量的相对误差均小于20%时,偏差演化的主导方向未改变,此时状态转移矩阵Ai,f是有效的。校验结果显示,i=1时位置偏差分量的相对误差均未超过18%,i=2, 3时各偏差分量的相对误差百分比均未超过0.3%。

(14)
由式(14)求得第i段起点处施加的脉冲冲量为
(15)
结合式(14)与式(15),得到探测器自ti时刻施加脉冲后线性转移至tf时刻导引终点的速度偏差为
(16)
记标称轨道上距离预定交会对接点200 km的近程导引段起点时刻为tsr。将探测器在远程导引共面制导控制下tsr时刻的实际运动状态与标称轨道上近程导引段起点的理想运动状态作差,得到远程导引段的最终制导偏差。
由于采用该方法的共面远程导引是基于线性化近似的无反馈粗制导过程,并且存在脉冲修正瞬间完成的理想化假设,在近程导引段不能采用该方法进行制导。
3.3 基于阻尼振动形式加速度的异面偏差修正
针对oTxy平面法向的异面位置与速度偏差分量,本文采用一种阻尼振动形式的控制加速度,对异面偏差扰动进行遏制,使探测器不断向共面方向逼近,达到远程导引段异面偏差收敛的目的。

(17)
式中:cr与ce均为大于零的常数,在这里分别称为阻力系数和弹力系数。
为了同时达到快速收敛以及避免周期性振动带来更多燃料损耗的目的,应满足临界阻尼条件
(18)
该条件下,式(17)将以阻尼振动的临界状态实现异面偏差的收敛。
4 仿真算例
4.1 近程导引段制导控制
根据2.2节的分析,取标称轨道上距离预定交会对接点200 km处为近程导引段起点,并按照在起点处取最大容许偏差的原则,设置1 300 m的初始位置偏差与9 m/s的初始速度偏差,偏差方向随机生成。各向发动机比推力大小均为0.2 m/s2。仿真结果显示,在取不同偏差方向的初始条件下,最终都能在预定交会对接时刻将状态偏差控制在可行对接初始参数区间内。下面取其中一个初始偏差方向的情景进行仿真结果的展示。
表1展示了oTxyz系中tsr时刻近程导引段起点处探测器与标称点的初始状态条件及状态偏差。各轴向上偏差相轨迹与发动机比推力作用随时间变化的曲线如图6所示。在近程导引过程中,位置偏差矢量与速度偏差矢量的变化轨迹如图7所示。

表1 近程导引段初始状态条件及状态偏差Table 1 Initial state conditions and deviations of short-range guidance segment
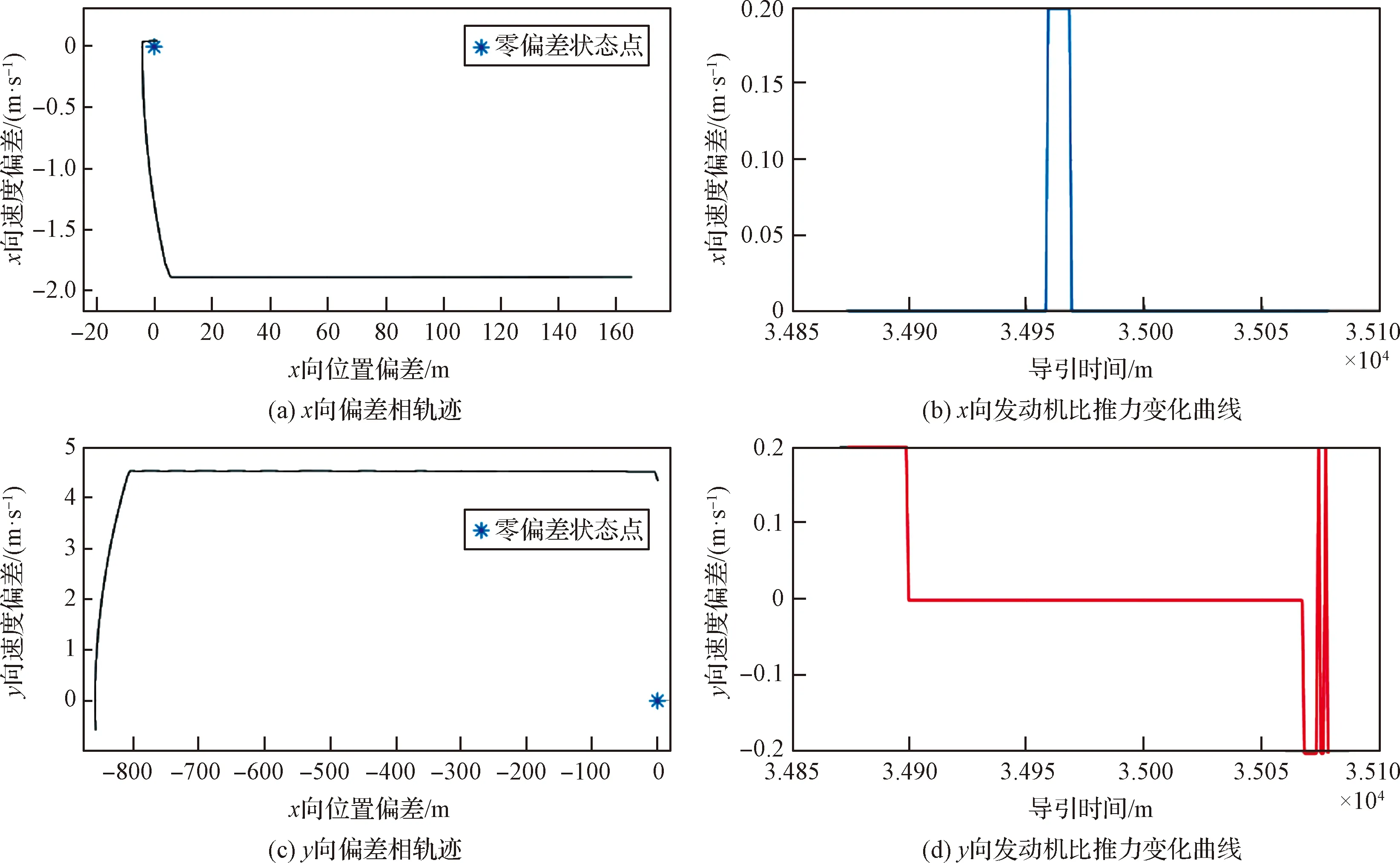

图6 各向相轨迹与发动机推力变化曲线Fig.6 Curves of phase trajectory and engine thrust in each direction

图7 近程导引过程中的偏差矢量变化轨迹Fig.7 Trajectories of deviation vector in the process of short-range guidance
仿真结果显示,近程导引段耗时仅205 s,各向偏差相轨迹稳定收敛至横纵坐标轴附近。最终在预定交会对接时刻控制得到的对接位置偏差为:δrf=[1.26,-0.08,-0.68]Tm,对接速度偏差为:δvf=[0.050 0, 4.334 9,-0.069 8]Tm/s。相较于可行对接初始参数区间,该情形下1.44 m的对接位置偏差小于要求的4 m可行对接位置偏差;4.34 m/s的对接速度偏差小于要求的8 m/s可行对接速度偏差。能耗方面,各向发动机开机工作的时长之和为92 s,施加的总冲量为18.4 m/s,说明该方法消耗能量较少,达到了降低任务运输成本的目的。
以上仿真验证说明了本文设计的近程导引控制方法具有较高的实用性与可操作性。
4.2 远程导引段共面制导控制
以标称轨道为基准,在月球影响球进入点设置10 km的初始位置偏差与10 m/s的初始速度偏差。采用线性近似法瞄准预定交会对接点计算需要施加的脉冲冲量,并在远程导引各阶段起点处进行脉冲修正,得到远程导引过程中oTxy平面内探测器x,y向实际运动状态相对于理想运动状态的状态偏差。自月球影响球进入点开始进行远程导引的过程中,到达各阶段起点所经历的时间、施加的脉冲冲量以及发动机开机时长等相关参数如表2所示。各阶段起点处的状态偏差如表3所示。在远程导引过程中,x,y向状态偏差随时间变化关系如图8所示。

表2 远程导引过程中各阶段起点处的相关参数Table 2 Correlation parameters of phase starting points in the process of long-range guidance

表3 远程导引过程中各阶段起点处的状态偏差Table 3 State deviations of phase starting points in the process of long-range guidance
图8 远程导引过程中状态偏差变化曲线Fig.8 Curves of the state deviation in the process of long-range guidance
由表2可知,该算例中远程导引开始后第34 874 s进入近程导引段,远程导引过程中各阶段施加脉冲修正的总冲量为9.002 8 m/s,制导控制成本较低。由表3可知,在近程导引段起点处,428.96 m的位置偏差与2.127 1 m/s的速度偏差均小于2.2节提出的1 300 m入轨位置偏差精度与9 m/s入轨速度偏差精度,说明该远程导引方法能够满足近程导引段的入轨精度需求。从精度上来说,该导引方法是可行的;从能耗上来说,该导引方法是节能的。
4.3 异面偏差修正
|az|=|-ceδzm|≥Δa
(19)
结合式(18)中的临界阻尼条件,得到cr与ce的最小取值分别为6.99×10-3和1.22×10-5。


图9 异面偏差修正过程中偏差变化曲线Fig.9 Curves of deviation in the process of correcting the deviation of different planes
由图9(a)可知,在远程导引开始后第2 630 s,异面位置偏差从1 000 m收敛至不到1 m,较快地满足了修正精度的要求;在近程导引段起点处,异面位置偏差仅有0.6 m,达到了预期的收敛效果。由图9(b)可知,异面速度偏差波动后快速收敛,偏差峰值低于1.3 m/s,修正精度高,接近于0。该型推力器全过程施加的总冲量为2.554 7 m/s,修正效率较高,成本较低。
以上仿真结果显示,该方法的异面偏差修正效果比较理想,达到了期望的精度要求,充分验证了基于阻尼振动形式加速度的异面偏差修正方法的合理性与有效性。
4.4 各阶段仿真结果总结分析
将各导引阶段的仿真结果整理成表4。由表4可知,在预定交会对接时刻,最终该导引方法能将位置偏差稳定控制在4 m以内,将速度偏差稳定控制在8 m/s以内,满足对接精度要求;同时各阶段总能耗之和仅有29.95 m/s,远小于嫦娥五号近月制动平均消耗约780 m/s的速度增量[23],说明该导引方法具有精准可行和节约高效的特点。

表4 各导引阶段的仿真结果Table 4 Simulation results of each guidance phase
5 结 论
本文针对面向旋转空间站的绕月双曲交会导引过程,提出了一种多阶段导引控制方法。采用连续推力条件下相平面开关控制法进行近程导引段的制导设计,能够达到“钓鱼式”交会对接的精度要求。在远程导引段的设计中,提出基于偏差演化线性近似法的脉冲修正控制方法,能够满足近程导引段的入轨精度需求。采用一种阻尼振动形式的控制加速度进行异面偏差修正,可以有效地收敛异面偏差。
仿真算例表明,该方法策略充分适应了绕月双曲交会对接中不近月制动与近似无冲击交会的要求,与嫦娥五号月球探测器近月制动的设计方法相比,该导引方法具有节能优势,能够为降低载人月球探测任务运输成本提供参考。
