面向GEO空间碎片清除任务的智能轨迹制导算法
2023-06-21黄旭辰黄旭星
黄旭辰,黄旭星,杨 彬,李 爽
(南京航空航天大学航天学院,南京 211106)
0 引 言
目前大量碎片在数条具有特殊功能的轨道上聚集,对当前卫星的安全和未来的空间任务开展存在严重的威胁。其中,作为经典近地任务轨道,地球静止轨道(GEO)的星下点始终保持在固定区域。当前空间碎片不断累积已经成为制约GEO轨道资源利用的关键因素,GEO卫星空间碎片的主动清除是保障近地空间安全的重点需求之一。
由于太空环境中存在多种不可忽略的摄动影响,航天器在扰动环境下会偏离标称轨道以致无法精确地交会目标,需要利用转移轨迹制导技术控制卫星到达期望位置。当前空间目标交会转移轨迹制导技术主要为标称轨迹跟踪以及预测校正制导方法。标称轨迹跟踪方法利用合适的控制律将航天器维持在标称轨迹附近,目前已被广泛使用[1-3]。然而该技术也存在初值敏感、鲁棒性较低的问题。预测校正制导技术则基于高精度模型对转移轨迹末端状态进行预测和修正,因此相比标称轨迹跟踪方法具有更高的精度和鲁棒性,对初始状态误差相对不敏感。Youssef等[4]为了降低对末端位置预测的计算量,均采用了控制量参数化的方法,不同学者对控制量的选择不同。Powell[5]在预测末段状态时采用了四阶龙格库塔法,而在计算控制量修正时采用了不需要求解雅克比矩阵的二分法。然而上述这些把控制变量设置为参数的方法往往只能得到较优的可行解,若要追求更优的结果则需要借助更先进的优化算法。Jorris等[6]引入了高斯伪谱法用于快速得到满足末端约束精度的最优修正轨迹,形成相应的矫正制导率。水尊师等[7]把预测校正制导转化为一个最优控制问题,通过对控制量和状态量的离散,利用直接法的方式优化满足末端约束的最优轨迹。王帅等[8]将微分修正方法应用于地球圆轨道同轨调相问题中,采用其快速计算调相轨道参数。刘磊等[9]在设计“嫦娥二号”探测小行星的轨道时,采用微分修正方法计算卫星在第三体摄动和光压摄动下需要做出的初始状态修正。赵吉松等[10]在对探月返回飞行器的跳跃式再入轨迹进行初次整体优化后,为了降低终端误差选择在跳跃轨迹最高点对其进行二次优化。邓雁鹏等[11]在采用凸优化方法求解月面着陆动力下降段轨迹优化问题时,没有预先给出标称轨迹,而是在优化过程中根据时变的环境参数实时修正加速度。夏存言等[12]在研究航天器相对运动轨道设计问题时,借助微分修正方法处理包含J2摄动的非线性动力学模型。虽然以上方法可有效保证末端状态精度,但轨迹修正过程中复杂动力学模型参数的迭代计算需要消耗大量时间,严重制约高精度转移轨迹的制导效率。
提高预测校正制导效率的关键之一是提高轨迹修正过程中复杂动力学加速度的计算速度。针对复杂非线性模型的快速预测问题,深度神经网络(DNN)在利用大量样本进行训练后,可建立输入与输出之间的高精度映射关系,有效提高计算效率。因此深度神经网络技术常用于非线性模型的拟合与预测。Snchez-Snchez等[13]在研究建立在线的最优控制系统时,采用了深度神经网络方法,并且验证了非训练样本的数据也能通过此网络生成控制律。Julian等[14]发现深度神经网络方法在解决无人机轨迹避障问题上,在保证计算精度的同时,计算效率远高于传统优化方法。Watanabe等[15]也同样在研究深度神经网络处理轨迹规划问题时,发现深度神经网络拟合可以在优化效果相当的情况下大大提高计算速度。许寅[16]采用循环神经网络的改进形式即长短记忆网络对航天器的在轨状态的异变趋势进行预测,建立了性能更加优异的预测模型。黄煌[17]将深度神经网络方法应用于空天飞行器的控制分配研究中,在无需优化算法提供样本的情况下,实现了非线性控制分配。朱俊鹏等[18]在轨道预报研究中加入了长短期记忆网络,同样达到了所需的预报精度。刘宇航等[19]在研究间接法优化变比冲小推力轨迹优化问题时,采用深度学习的方法对协态变量初值进行估计。颜鹏等[20]在研究行为方式不定的移动目标轨迹预测问题时,借助深度神经网络建立目标的行为决策与偏好模型。梁小辉等[21]将径向基函数(RBF)神经网络应用于导弹滑模拦截制导率的设计,显著提高了鲁棒性能。根据以上研究可知,深度神经网络在解决强非线性模型参数的计算方面具有较大优势,可用于高精度动力学模型参数的快速求解计算。
本文针对GEO卫星空间碎片清除的高精度轨迹快速制导问题,发展GEO卫星转移轨迹智能制导方法。本文主要贡献如下:首先,面向GEO卫星转移轨迹修正问题,基于预测校正制导算法构建通用的轨迹转移制导架构,可应用于传统算法以及人工智能算法;第二,针对轨道递推动力学模型参数的计算效率问题,利用一个深度神经网络同时对日月星历以及高阶非球形引力系数进行拟合,实现动力学模型参数的快速预测;第三,基于微分修正算法求解脉冲轨迹修正机动,分析智能动力学模型的精度,在此基础上建立混合模型实现高精度轨迹快速修正。本文安排如下:第二节简要描述了GEO卫星轨迹修正问题模型以及预测校正制导方法;第三节详细推导了预测校正制导算法数学模型,介绍了深度神经网络的理论结构以及具体阐述了本文提出的基于DNN的预测制导轨迹修正方法;第四节通过仿真验证了DNN网络对高精度动力学模型中参数的预测效果,并对高精度模型、DNN模型和“DNN+高精度”的混合模型下的轨迹修正效果进行验证分析。
1 GEO卫星轨迹修正问题
1.1 轨迹修正问题描述
面向GEO卫星的空间碎片清除任务,需要在任务规划阶段设计完整多目标交会转移轨迹。同时,由于GEO卫星在轨运行会受到多种摄动的影响,这些摄动包括地球非球形引力、太阳及月球的第三体引力、太阳光压以及广义相对论效应等。在GEO卫星轨迹初始设计与规划任务中,为了提高设计与优化效率,一般仅考虑二体问题以及简单的动力学摄动的影响,如仅考虑地球非球形引力摄动J2项等。所得标称GEO空间碎片清除转移交会轨迹与高精度动力学模型下的真实转移轨迹存在较大偏差,影响实际空间任务的开展。此时,需要利用高精度且鲁棒的轨迹修正方法对误差进行衡量,并利用轨道机动对转移轨迹进行修正。
GEO卫星的高精度轨迹修正过程可概述如下:面向任务规划阶段或者GEO卫星实际在轨运行阶段,通过初始设计规划或者导航定轨获得GEO卫星在初始时刻的位置速度矢量,利用高精度动力学模型递推初始状态在一段时候后的末端状态,将该实际末端状态与期望的末端进行对比,若末端状态误差在误差允许范围内,则不需要进行轨迹修正;若末端状态误差超出允许范围,则需要对GEO卫星的轨迹进行修正。此时,可通过施加轨道机动使GEO卫星沿着新的轨迹进行转移,使其一定时间后仍能到达期望的目标状态。而该轨迹修正机动的求解则为GEO卫星轨迹修正问题的关键步骤。
1.2 预测校正制导方法
预测校正制导方法利用当前GEO卫星状态预测一段时间后的末端状态,并以此为基础对转移轨迹进行修正。预测校正方法的轨迹修正原理和过程如图1所示。以GEO卫星轨道转移为例,标称轨迹目标位置基于简化动力学模型进行设计,如图中目标位置所示。理想情况下GEO卫星可在一段时间内从出发位置转移至目标位置。然而,由于动力学模型、GEO卫星导航定轨等存在偏差,导致GEO卫星的实际转移轨迹无法到达期望的标称目标位置,如图中实线所示。因此,通过施加轨迹修正机动的方式修正GEO卫星的转移轨迹,使卫星沿着修正后的轨迹到达期望的目标位置,如图中虚线所示。而施加机动进行轨迹修正的过程就是一次预测校正制导。其中,GEO卫星在求解轨迹修正机动时,利用当前状态以及高精度动力学模型对修正轨迹的末端位置进行预测,再通过校正操作使末端位置到达期望的标称位置,并求解该修正轨迹的机动。此外,由于生成修正轨迹的动力学模型以及导航定轨依然存在一定的误差,在长时间的GEO轨道碎片清除任务中,一般需要通过多次机动对转移轨迹进行修正,以获得更高的末端状态精度。

图1 预测校正制导原理示意图Fig.1 Schematic diagram of predictor-corrector guidance
2 基于DNN的智能预测校正制导方法
2.1 预测校正制导算法架构
本文利用微分修正算法进行预测校正制导轨迹修正机动的求解。其中,微分修正算法采用基于线性近似理论的Newton-Raphson迭代算法,通过数值近似的方法快速获得非线性方程的近似解。
针对GEO卫星空间碎片清除任务,本文考虑GEO卫星的轨道转移目标为一段时间后的末端三维位置矢量,则期望目标参数rf,norm可表示为如下形式:
rf,norm=[xf,norm,yf,norm,zf,norm]T
(1)
式中:xf,norm,yf,norm,zf,norm为期望末端位置矢量的三轴分量。
则轨迹修正的末端位置目标可得如下:
F(v0)=rf,norm
(2)
即利用轨道机动对GEO卫星轨迹进行修正,使卫星在末端时刻的位置与期望位置参数一致,即符合以下形式:
r(v0)-rf,norm=[0,0,0]T
(3)
根据Newton-Raphson迭代法,可在实际三轴末端位置矢量F附近进行泰勒展开,其形式如下所示:
(4)

(5)
则在一阶精度的状态下,GEO卫星轨迹转移制导过程中轨道机动各分量大小的修正量可通过如下方法进行求解:
(6)
其中,雅各比矩阵K通过数值差方法进行近似,针对不同方向施加微小变量求解变化率,以x方向为例
(7)
式中:v0,x为初始速度在x方向上的分量。
则GEO卫星轨道转移机动的大小与期望与实际末端三轴位置矢量的误差可表示为如下关系:
Δv=K-1Δrf
(8)
在利用微分修正算法进行GEO卫星轨迹转移制导的实际应用当中,将GEO卫星当前状态作为微分修正的初始状态,得到计算实际末端三轴位置矢量与期望三轴位置矢量的偏差,由于K是由数值差分方法近似得到的,因此需要多次迭代得到符合误差精度的修正量。考虑到高精度动力学模型存在强非线性,难以获得解析的偏导矩阵,因此本文采用数值方法求解雅各比矩阵。转移轨迹微分修正的数值迭代流程如图2所示。
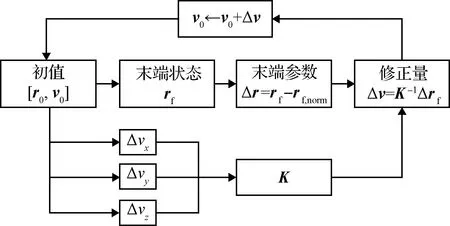
图2 微分修正轨迹转移制导流程图Fig.2 Flow chart of differential correction trajectory transfer guidance
1) 根据GEO卫星的初始位置r0、初始速度v0,计算碎片清除任务中期望轨迹转移时间的实际末端位置:
[xf(v0),yf(v0),zf(v0)]T=f(r0,v0)
(9)
2) 分别在速度矢量的三个分量上引入小的速度增量:
(10)
3) 计算实际的末端位置并求解轨迹机动修正量:
(11)
(12)
4) 计算修正后的轨迹修正机动:
v0←v0+[Δvx,Δvy,Δvz]T
(13)
5) 不断重复步骤1)~4),直到末端三轴位置Δr满足误差需求,即可求解所需的轨迹修正机动。
本小节面向GEO卫星空间碎片清除的转移轨迹修正任务需求,介绍了基于微分修正算法的预测校正制导架构,从而为GEO卫星轨迹转移轨迹的高精度及鲁棒制导提供算法架构基础。
2.2 深度神经网络
由于高精度动力学模型中日月星历以及高阶非球形引力摄动参数需要消耗大量时间进行迭代计算,因此本文采用深度神经网络对参数进行拟合,实现快速预测。对于不同的人工神经网络,为了对复杂的非线性关系达到良好的拟合效果,往往会设置多个隐含层。这种包含多个隐含层的人工神经网络一般被统称为深度神经网络。本文所使用的深度神经网络是在BP神经网络的基础上,增加隐含层数量构建得到的。从结构上讲,它与BP神经网络相同,包含输入、隐含和输出层,每一层都存在若干神经元,各层内的神经元之间相互独立,每一层神经元数据向下一层的传递都包括权值、偏置和激活函数三部分。虽然在理论上已经证明,具有单隐含层的BP神经网络就能以任意精度逼近任意的非线性函数,但这需要庞大的单层神经元个数,在训练过程中大大增加计算量。深度神经网络通过增加隐含层数量很大程度上减少了隐含层的神经元总数,大大提高训练效率。
深度神经网络算法的关键是通过梯度下降法将误差进行反向传递。其逻辑核心为:首先学习样本数据的输入部分进行归一化操作(为了提高训练结果的泛用性)放入输入层,数据经过隐含层以及输出层的多步计算转化后,输出计算得到的预测值。接着比较预测值和真实值(期望值)间的误差,在误差无法到精度要求时,网络会将其从输出层向输入层反向传播,并借助梯度计算各层的权值、偏置的调节量。在反复迭代重复上述步骤的过程中逐步降低网络的输出值与样本的期望输出值之间的误差,直至达到最大迭代次数或满足精度要求。保存优化后的网络结构以及各层的权值、偏置参数。而后以该内在关系为基础,提取未知样本的输入信息,即可获得对未知样本的映射(预测)。
深度神经网络的框架搭建和运行模式主要分为以下几个部分:
1)确定网络结构(主要是隐含层层数与神经元数量)及相关参数的初始化;
2)深度神经网络的学习,信息由输入层进入隐含层并在其中层层传递,最后由输出层计算这一次迭代的预测结果;
3)计算当次迭代预测结果与样本的期望输出之间的误差,并将算得的误差反向传播到输入层,在传播过程中调整各层神经元之间的权值和偏置;
4)循环迭代2)、3)两个过程,逐步降低计算误差,直到误差达到设定的目标误差或循环迭代次数达到设定的最大次数;
5)获取到最优的权值和偏置;
6)提取检测样本的输入信息,借助第5)步获取到的最优权值和偏置,便可计算出测试样本的预测输出。
网络的运算流程如图3所示:
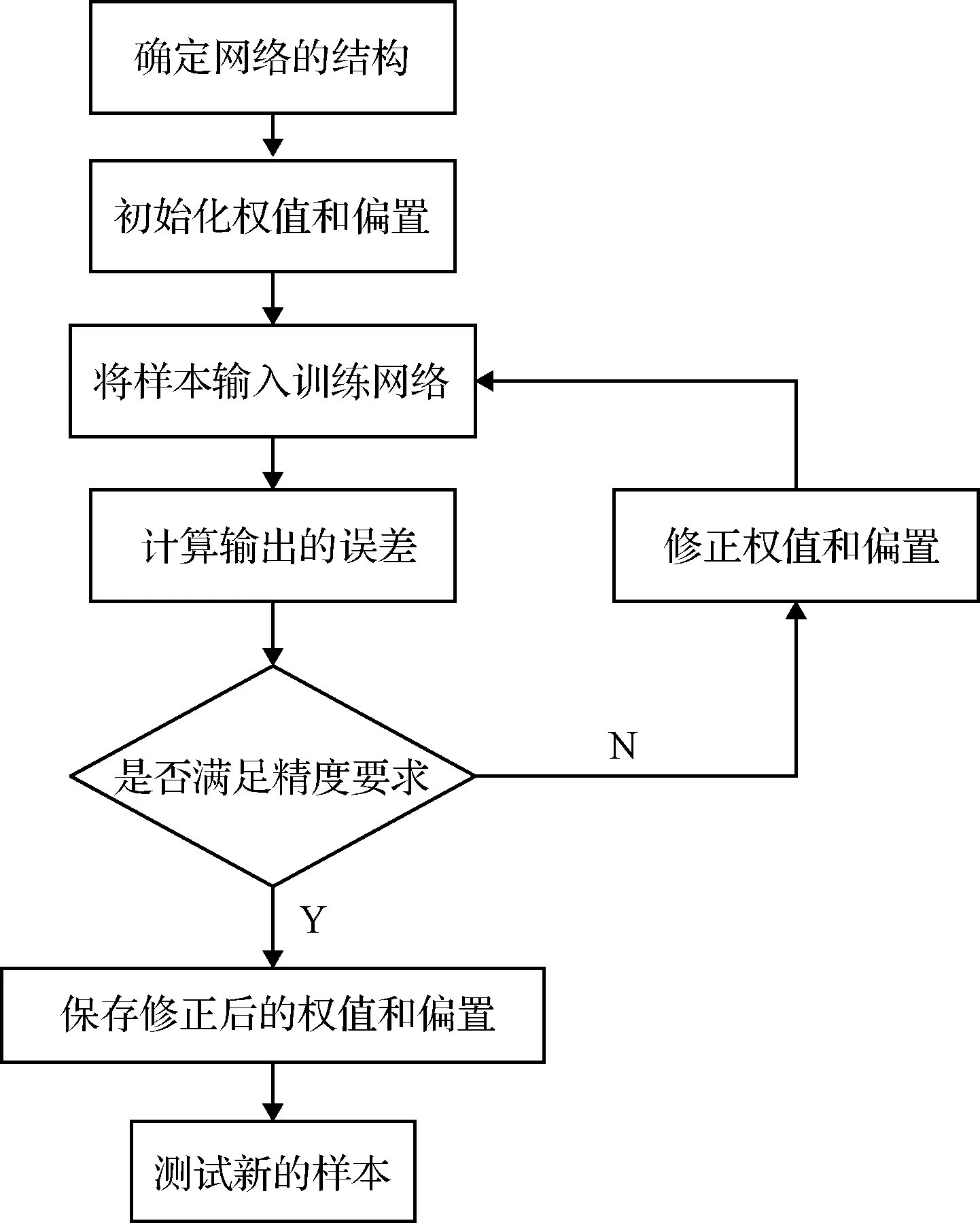
图3 深度神经网络流程图Fig.3 Flow chart of a deep neural network
深度神经网络的运行过程主要分为两大部分,即输入数据向输出层的正向传递、预测结果与真实值误差的反向传播。
1) 输入数据向输出层的正向传递(输入层-输出层),其具体的数学表达过程如下:
输入层第i个节点的输出为xi;
隐含层第j个节点的输出为
(14)
其中,ωij表示输入层第i个节点与隐含层第j个节点之间的连接权值,bj表示隐含层第j个节点上的偏置,f1表示隐含层的激励函数。
输出层第k个节点的输出为
(15)
其中,ωjk表示输入层第j个节点与隐含层第k个节点之间的连接权值,bk表示隐含层第k个节点上的偏置,f2表示输出层的激励函数。
2) 预测结果与真实值误差的反向传播(输出层-输入层),其具体的数学表达式如下:
(16)
其中,ek表示输出层第k个节点的误差。
网络的计算误差首先反馈到隐含层,并修正输出层与隐含层之间的权值和阈值。修正的方向为E和ωjk之间梯度的负值。修正量Δωjk(n)表示为
(17)
其中,η表示网络的学习率。
(18)
同理可得,偏置bk(n)的修正量Δbk(n)可表示为
(19)
(20)
通过同样的方式,可以计算得到隐含层传递至输入层的误差,继而得到输入层与隐含层之间的权值和偏置的修正量。
本文将深度神经网络应用于对高精度动力学模型中的日月星历以及高阶非球形引力摄动参数进行拟合,提高了后续GEO卫星精确轨迹修正的计算效率。
2.3 基于DNN的轨迹修正方法
根据GEO卫星转移轨迹修正流程可知,利用预测校正制导算法架构进行高精度转移轨迹修正时,需要通过数值递推预测转移轨道在目标时刻的三轴位置矢量。然而,由于用于高精度轨迹修正的高精度动力学模型包含高阶地球非球形引力摄动、日月引力摄动、太阳光压等,直接利用高精度模型进行轨迹修正必然严重影响轨迹预报效率。其中,地球非球形引力摄动需要通过迭代进行求解,且计算量与非球形引力摄动的阶数呈幂函数关系,导致越高的动力学模型精度需要越长的时间进行迭代计算;而日月引力摄动需要计算高精度的行星星历,利用常用的高精度星历(如DE421)求解日月星历,需要消耗大量的计算时间。以上因素严重影响预测校正制导算法轨迹修正的计算效率。而深度神经网络可对强非线性参数进行拟合近似,并根据输入参数快速预测相应的输出参数。本文利用DNN技术对高精度动力学模型中需要消耗大量时间进行迭代计算的日月星历以及高阶非球形引力摄动参数进行拟合,建立GEO卫星当前状态与相关动力学参数之间的映射关系,通过离线训练-在线应用的方式,实现有关参数的快速输出,进而达到提高预测校正制导算法效率的目的。基于DNN的智能制导算法架构如图4所示。
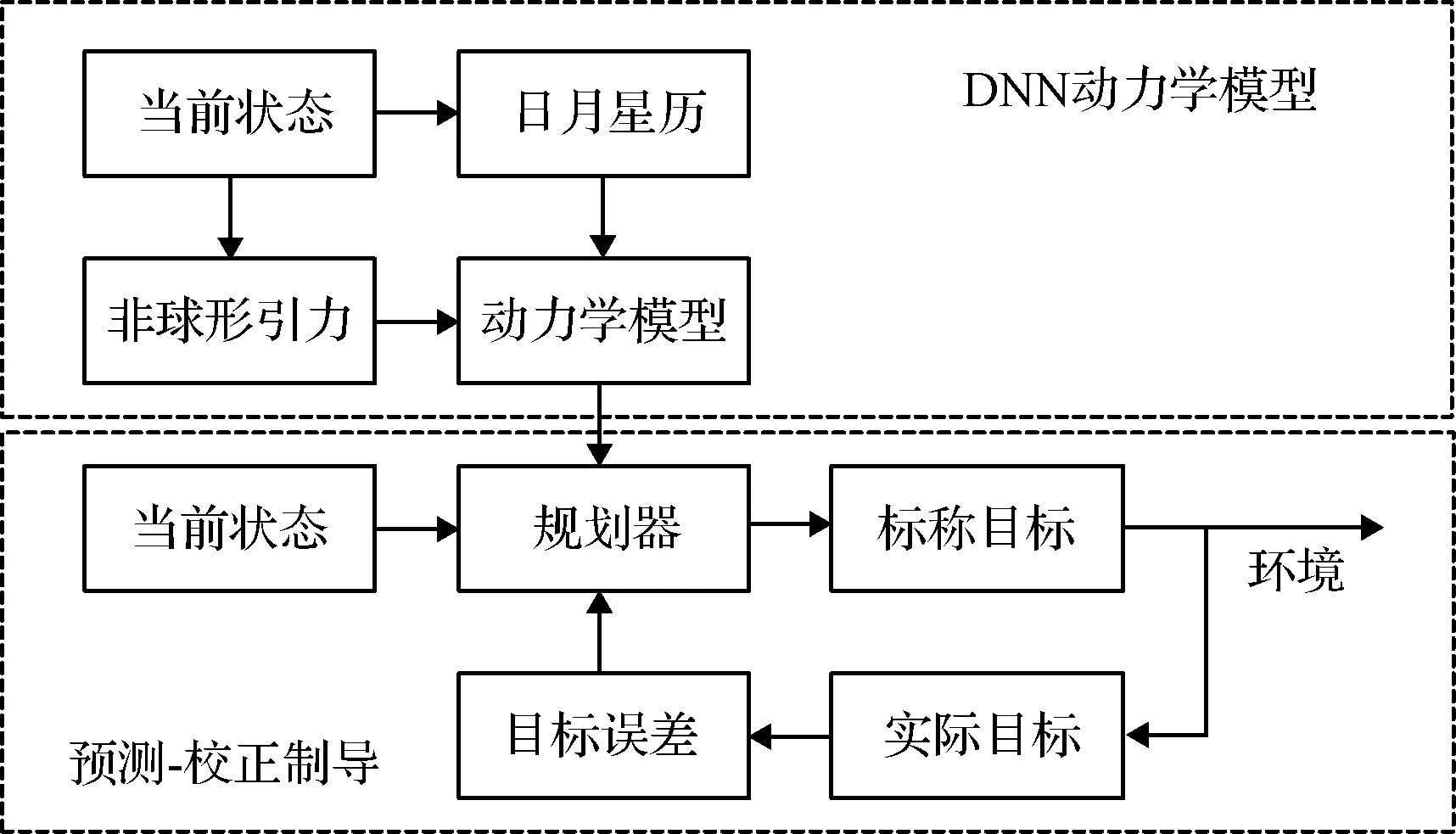
图4 基于DNN的智能制导算法架构示意图Fig.4 Schematic diagram of a DNN-based intelligent guidance algorithm architecture
本文基于DNN的智能制导算法架构分为开环的DNN动力学模型以及闭环的预测校正制导两部分。其中,预测校正制导环节采用前面介绍的GEO卫星微分修正算法进行高精度轨迹修正。而DNN动力学模型则利用DNN技术对动力学模型的部分参数进行拟合。本文考虑的DNN预报参数分别为太阳星历、月球星历、高阶非球形引力摄动等。此外,为保证DNN算法的高效性,本文利用一个网络同时对三个参数进行拟合及预测。日月星历预测模型MDNN可表示如下:
[rS,rM,aNS]=MDNN(MJD,r)
(21)
其中,MJD为当前时刻简化儒略; 下标“S”和“M”分别代表太阳和月球。
本文DNN通过地面训练-星上应用进行动力学模型参数的拟合。首先,利用传统高精度动力学模型生成不同时间下的日月星历以及不同GEO轨道位置下的高阶地球非球形引力参数。将不同的时间GEO轨道位置参数作为网络输入,对应的太阳、月亮星历作为网络输出,创建大量数据样本用于DNN的训练。完成DNN的训练后,即可将GEO轨道碎片清除任务规划或者导航定轨所得的GEO卫星轨道参数及对应的时间作为数据输入,利用DNN快速求解相应的日月星历以及高阶地球非球形引力参数,从而实现利用DNN对动力学模型参数进行拟合并输出的目的,进而间接提高GEO卫星轨道预报效率。
3 空间碎片交会轨迹修正仿真校验
3.1 DNN训练样本生成
本文基于DNN建立智能预测校正制导架构,利用DNN拟合日月星历以及高阶地球非球形引力参数,进而实现快速的高精度轨迹修正。其中,DNN通过地面训练-星上应用的方式实现参数的拟合以及输出。训练样本的结构如式(21)所示。在此之中,DNN训练样本包括不同时间下的日月星历以及GEO卫星对应的高阶地球非球形引力摄动参数。
本文利用DE421高精度行星星历输出不同时刻地心J2000惯性坐标系下的太阳与月球坐标。考虑2023年1月1日0时为GEO卫星空间碎片清除任务的起始时间,以2024年1月1日0时为任务结束时间,将该时间段平分成10万个时间点,利用DE421输出对应的太阳及月球星历,其形式如下所示:
[rS,rM]=GDE421(MJD)
(22)
其中,GDE421代表DE421高精度星历。
然后,为描述高阶地球非球形引力摄动参数,本文利用勒让德多项式建立地球非球形引力模型,其摄动势函数如下:
(23)
Qlm=Clmcos(mλ)+Slmsin(mλ)
(24)
式中:μ,r的定义与二体动力学模型一致;R为中心天体赤道平均半径;l,m分别为非球形引力摄动带谐项和田谐项阶数;λ,φ分别为航天器在中心天体表面投影的地理经度和纬度;Clm,Slm分别为非球形引力摄动的带谐项和田谐项系数;Plm(*)为lm阶缔合勒让德多项式。
为保证GEO卫星转移轨迹的修正精度,本文考虑70阶带谐项以及70阶田谐项的高精度动力学模型,并考虑GEO卫星轨道半长轴内±100 km、倾角±5°的范围,随机生成10万组GEO卫星位置。然后根据高阶非球形引力摄动模型计算不同位置对应的摄动加速度,其形式如下所示:
aNS=GNS(r)
(25)
将日月星历以及高阶非球形引力摄动加速度进行随机组合,即可获得10万组训练样本用于DNN的训练。
3.2 深度DNN的训练
本小节利用DNN对所生成的10万个训练样本进行拟合,直接对DNN进行训练,建立当前时间以及GEO卫星位置与太阳、月球星历以及高阶非球形引力摄动参数之间的映射关系。然后,在实际应用中根据GEO卫星轨道时间和位置参数快速输出日月星历与高阶非球形引力摄动加速度。操作系统为Windows10 64位,运行CPU为Core i7-10875H @2.30 GHz,内存为32 GB,运行软件为MATLAB R2020b。通过多次测试,本文采用的DNN为具有3个隐含层的BP神经网络,每个隐含层具有72个神经元,从而保证参数的拟合精度。
对于3.1节10万个样本的DNN训练,MATLAB工具箱通过11 879次迭代、消耗12 946 s完成,DNN的训练结果如图5~图7所示。其中,完成10万个样本的训练后DNN均方差为4.960 1×10-5,相关系数大于0.999,表明本文选择的DNN可较好地拟合动力学模型参数,并具备较高的拟合精度。
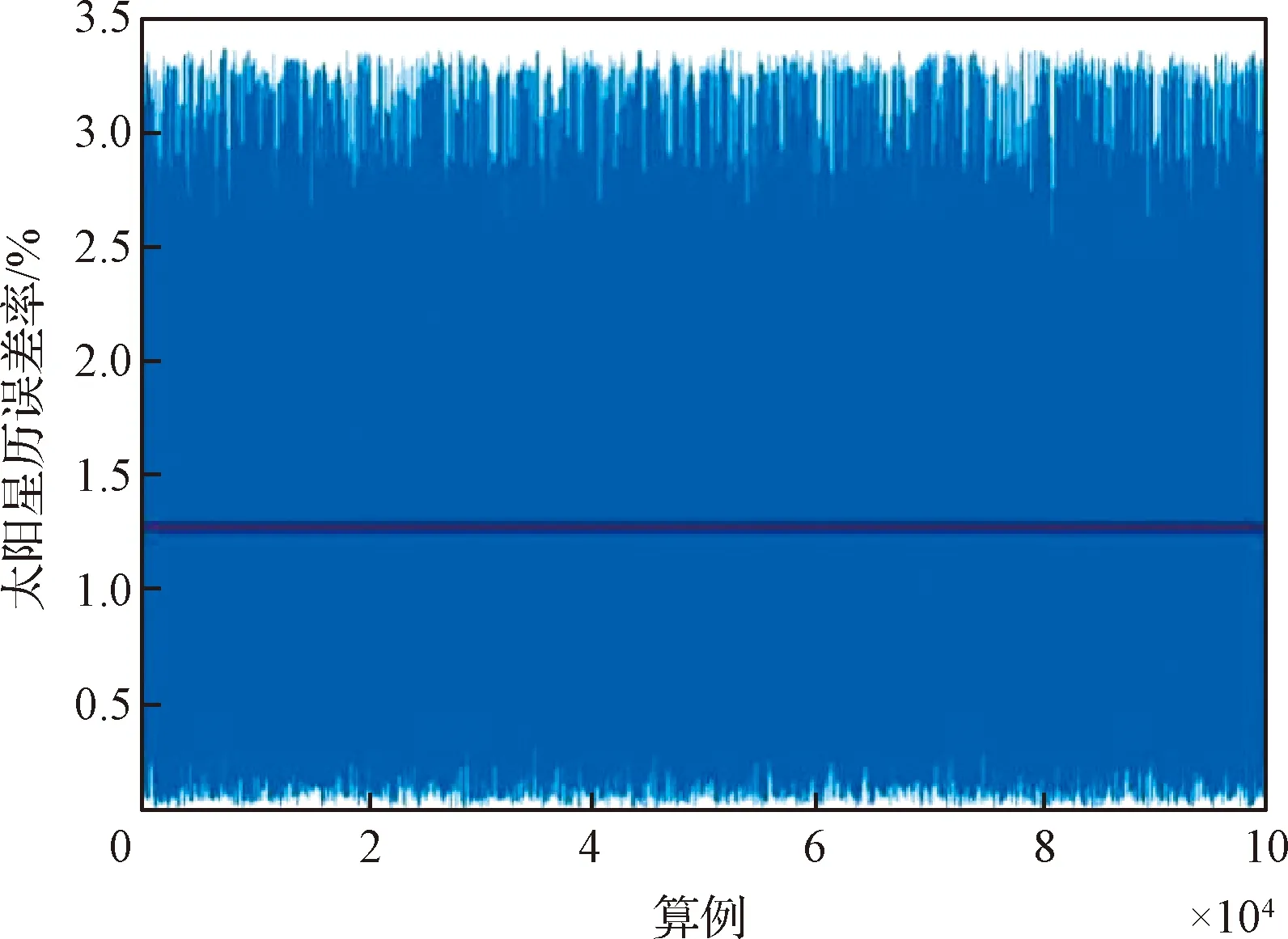
图5 太阳星历DNN预测误差Fig.5 Prediction errors of solar ephemeris by DNN

图6 月球星历DNN预测误差Fig.6 Prediction errors of lunar ephemeris by DNN
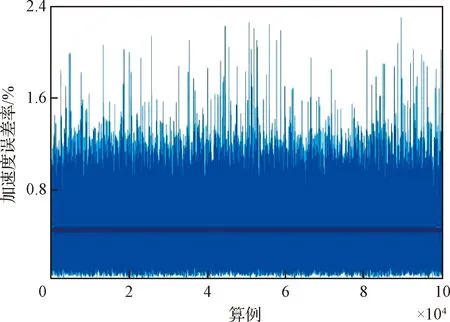
图7 高阶非球形引力摄动DNN预测误差Fig.7 Prediction errors of high-order non-spherical gravitational perturbation by DNN
然后,采用10万组蒙特卡洛仿真测试,验证DNN的拟合与预测精度。其中,蒙特卡洛仿真随机选择时间以及GEO卫星位置矢量,计算实际太阳、月球星历以及高阶地球非球形引力摄动加速度,再利用DNN对这些参数直接进行预测,其结果总结如表1所示。

表1 DNN蒙特卡洛仿真校验结果Table 1 DNN Monte Carlo simulation verification results
根据蒙特卡洛仿真结果可知,DNN对日月星历以及高阶非球形引力摄动加速度都有较高的拟合效果,拟合的平均误差都小于3%。其中,基于DNN的太阳星历拟合平均误差约为1.25%,误差幅值约为3.5%;基于DNN的月球星历拟合平均误差约为2.77%,误差幅值约为12%。可知由于月球环绕地球的相对运动轨迹存在较强非线性,拟合效果不如DNN太阳星历拟合。由于日月第三体引力摄动的影响较小,因此该量级的误差是可以接受的。而高阶非球形引力摄动拟合平均误差约为0.432%,误差幅值约为2.4%,可知DNN对高阶非球形引力摄动加速度具有最好的拟合效果。
本小节统计了蒙特卡洛仿真过程中的传统高精度算法以及DNN算法对日月星历以及高阶非球形引力摄动加速度的计算时间消耗,其结果如表2所示。根据计算结果可知,相比于传统高精度参数的算法,训练后的DNN模型计算时间缩短58.7%。该结果表明,与传统高精度模型算法相比,DNN模型虽然在精度上存在一点劣势,但是在参数计算时间上具有较大的优势,可提高预测校正制导算法的轨迹修正效率。

表2 传统算法与DNN计算时间消耗Table 2 Traditional algorithm and DNN computing time consumption
3.3 GEO空间碎片清除任务高精度轨迹修正
根据3.2节的仿真结果,DNN可根据当前时间以及GEO卫星的位置矢量对日月星历以及高阶非球形引力摄动加速度进行快速预测,并具备较高的预测精度。本小节以GEO卫星空间碎片清除轨迹转移制导为例,通过数值仿真分别对高精度模型和DNN模型下的轨迹修正效果进行验证分析。仿真场景的初始条件如表3所示。其中,考虑的仿真初始时间为2023年1月1日0时(MJD:59 945),轨迹GEO卫星轨迹转移的末端时间为2023年1月1日12时(MJD:59 945.5),转移时间43 200 s。高精度动力学模型下GEO卫星的期望末端位置与实际末端位置偏差为198.4 km,三轴误差分量如下表,末端位置约束为10-6km。

表3 智能轨迹修正仿真初始条件Table 3 Initial simulation conditions for intelligent trajectory correction
首先,基于高精度动力学模型对GEO卫星转移轨迹进行修正,其结果如表4及图8、图9所示。根据结果可知,基于高精度模型的预测校正制导通过5次迭代即可完成高精度的轨迹修正,GEO轨迹修正机动大小为39.133 96 m·s-1,末端位置精度为4.234 7×10-9km。第一次和第二次迭代修正都把GEO卫星轨迹转移的末端位置精度提高1个量级,而后续三次迭代修正都把末端位置精度提高2~3个量级。然而,由于高精度模型需要计算高精度的日月星历以及高阶地球非球形引力摄动参数,导致需要消耗大量时间进行求解,轨迹修正所需的计算时间为77.9 s。
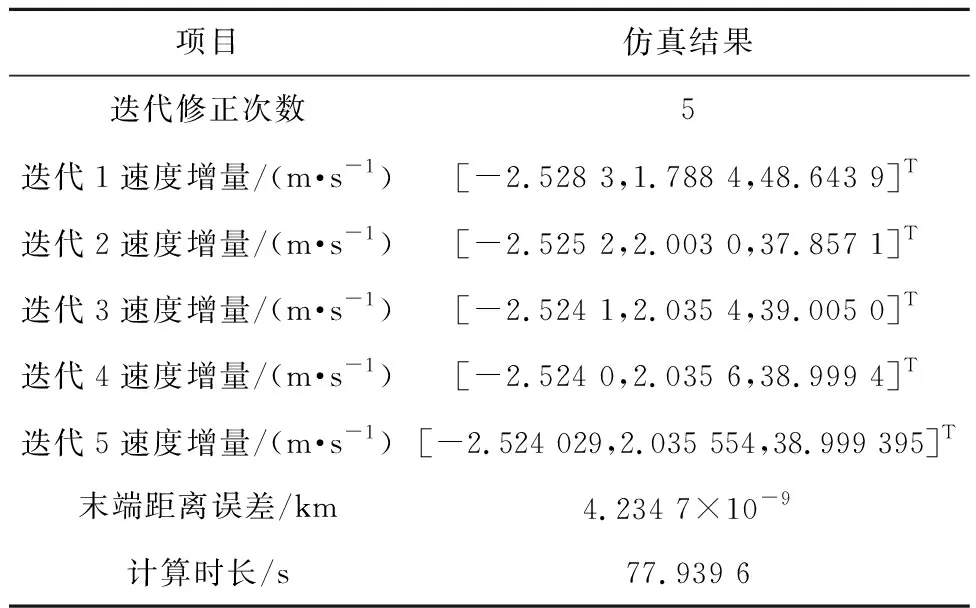
表4 高精度模型轨迹修正仿真结果Table 4 Simulation results of high precision model trajectory correction
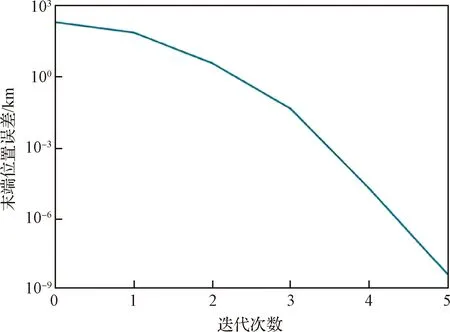
图8 高精度模型迭代修正过程Fig.8 High-precision model iterative correction

图9 高精度模型修正后转移轨迹Fig.9 Trajectory correction based on high-precision model
根据高精度迭代修正过程可知,当末端位置误差较大时,预测校正制导技术中微分修正算法中基于一阶泰勒展开的雅各比矩阵与实际变化率存在一定偏差,导致较大误差时的单次修正效率相对较低;而当末端位置误差较小时,雅各比矩阵与实际变化率之间的误差较小,此时轨迹末端误差的修正效率较高,因此单次迭代即可将末端精度提高多个量级,并可求解高精度的轨迹修正机动。
然后,基于DNN模型进行GEO卫星转移轨迹修正的仿真,其结果如表5及图10、图11所示。根据结果可知,基于DNN模型的预测校正制导通过5次迭代即可完成高精度的轨迹修正,GEO轨迹修正机动大小为31.636 56 m·s-1,在DNN模型下末端位置精度为4.234 7×10-9km。第一次和第二次迭代修正都把GEO卫星轨迹转移的末端位置精度提高1个量级,而后续三次迭代修正都把末端位置精度提高2~3个量级。同时,由于DNN模型利用网络快速输出日月星历以及高阶非球形引力摄动加速度,可节省大量计算时间,轨迹修正所需的计算时间为28.2 s,比高精度模型轨迹修正节省63.8%的计算时间。
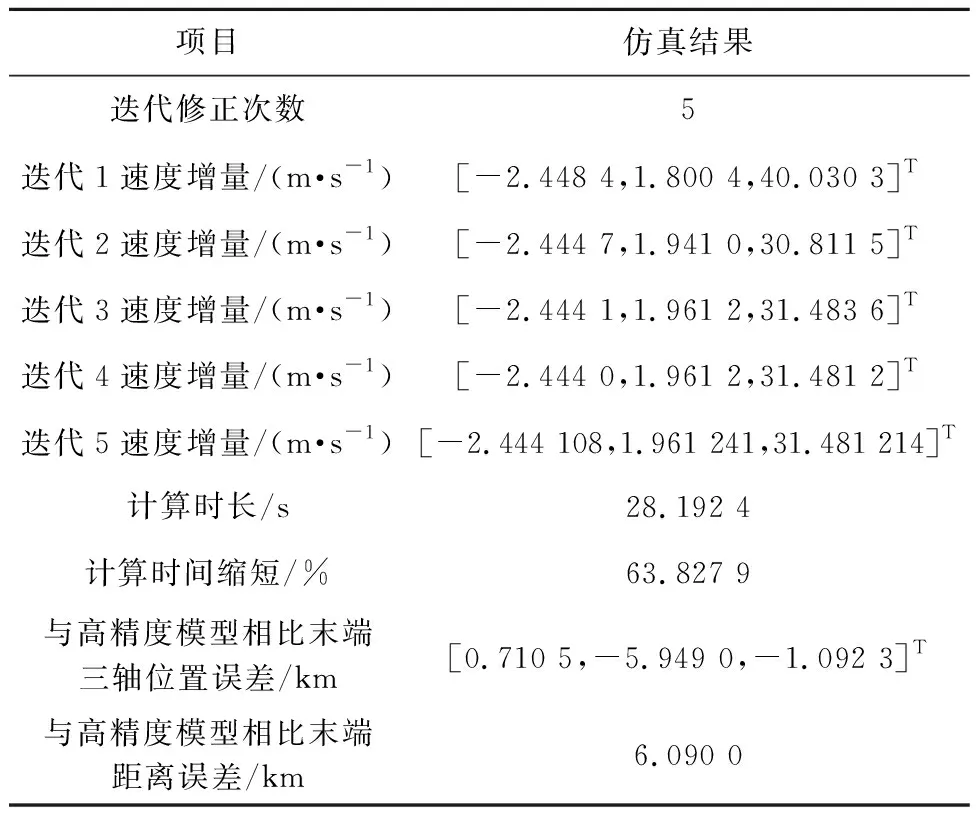
表5 DNN轨迹修正仿真结果Table 5 Simulation results of DNN trajectory correction

图10 DNN迭代修正过程Fig.10 DNN iterative correction
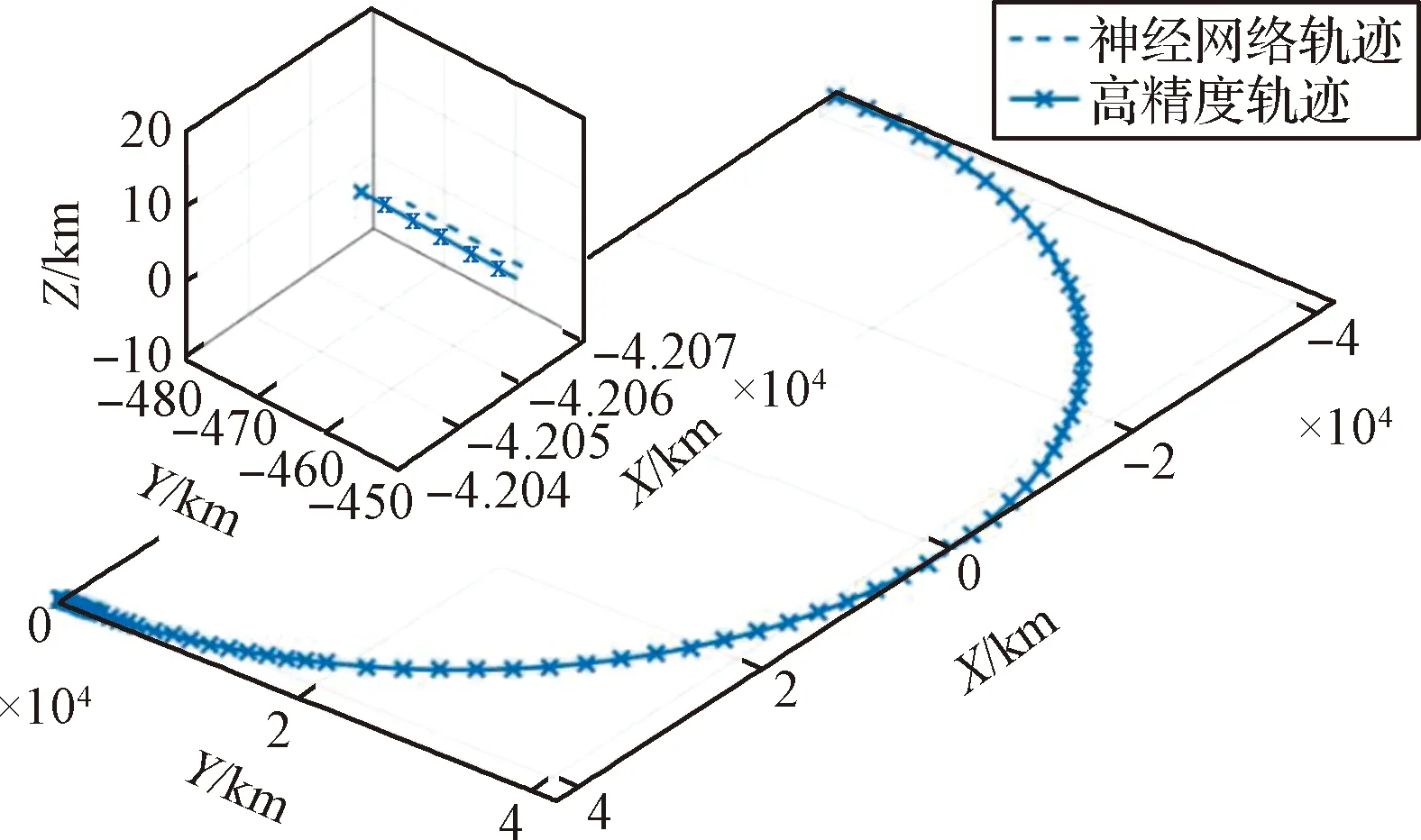
图11 DNN修正后转移轨迹Fig.11 Trajectory correction based on DNN
根据DNN迭代修正结果可知,当末端位置误差较大时,预测校正制导技术中微分修正算法中基于一阶泰勒展开的雅各比矩阵与实际变化率存在一定偏差,导致较大误差时的单次修正效率相对较低;而当末端位置误差较小时,雅各比矩阵与实际变化率之间的误差较小,此时轨迹末端误差的修正效率较高,因此单次迭代即可将末端精度提高多个量级。此外,由于DNN模型与高精度模型之间存在偏差,在长时间的轨道递推中误差会累积,导致修正轨迹在高精度模型中递推的末端状态与期望末端位置存在6.09 km的位置误差。因此,DNN模型可被用于预测校正制导中的转移轨迹粗修正,以提高轨迹预报效率。而当末端位置精度到达千米量级时,继续采用DNN模型将引入额外的末端位置误差,此时DNN模型不再适用。
3.4 “DNN+高精度模型”智能制导
根据3.3节的结果可知,基于DNN模型进行GEO卫星的预测校正制导可实现转移轨迹的快速修正,但同时由于DNN模型与真实模型之间仍存在偏差,修正后的轨迹在高精度动力学模型仍存在千米级的末端位置误差,影响预测校正制导的效果。因此本小节将DNN与高精度模型进行结合,建立“DNN+高精度”的混合模型轨迹修正方法对GEO卫星转移轨迹进行修正。首先,利用DNN模型对GEO卫星的转移轨迹进行粗修正,通过预测校正使其末端位置误差降至千米量级,然后利用高精度模型对转移轨迹进行高精度修正,使转移轨迹的末端误差满足任务需求。仿真的初始条件与表3一致。另外,考虑到DNN模型轨迹修正存在千米级的误差,将DNN模型的末端位置约束设定为10 km量级,从而在保证轨迹修正精度的同时,提高预测校正制导轨迹修正效率。
利用混合模型对GEO卫星转移轨迹进行修正,其结果如表6及图12、图13所示。根据结果可知,基于“DNN+高精度”模型的预测校正制导通过5次迭代即可完成高精度的轨迹修正,GEO轨迹修正机动大小为39.133 96 m/s,末端位置精度为5.537 4×10-7km,满足仿真设计需求。基于DNN模型的迭代修正把GEO卫星轨迹转移的末端位置精度提高1个量级,实现将GEO卫星转移轨迹末端位置精度提高至10 km量级。而基于高精度模型的迭代修正把末端位置精度提高2~3个量级,将GEO卫星轨迹转移末端精度提高至10-6km量级。同时,由于DNN模型利用网络快速输出日月星历以及高阶非球形引力摄动加速度,可节省一定的计算时间,轨迹修正所需的计算时间为66.8 s,比高精度模型轨迹修正节省14.2%。根据仿真结果可知,混合模型可实现高精度轨迹修正,修正后的GEO卫星转移轨迹可在期望时间内到达期望位置,而轨迹修正机动所需速度增量与高精度模型所得结果一致。同时,计算时间与高精度模型相比有一定的下降。以上结果表明本文提出的“DNN+高精度”模型轨迹修正方法可同时保证轨迹修正精度以及修正效率。
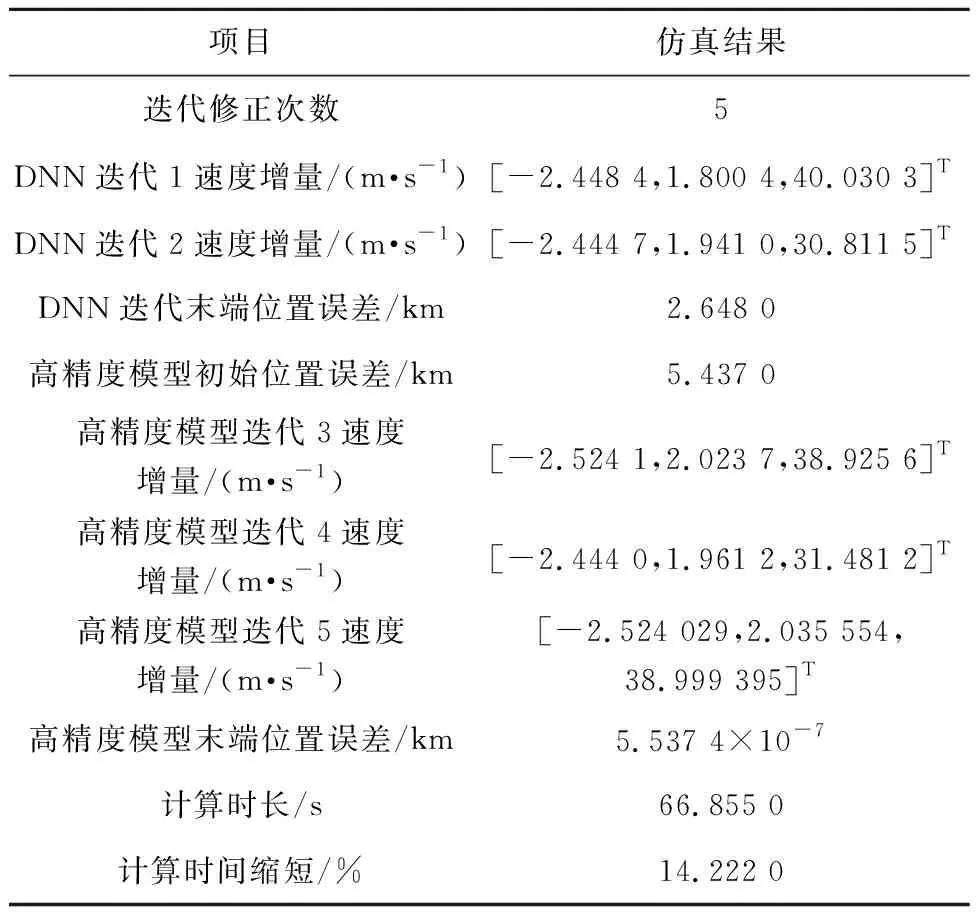
表6 “DNN+高精度”模型轨迹修正仿真结果Table 6 Simulation results of “DNN+High Precision” model track correction
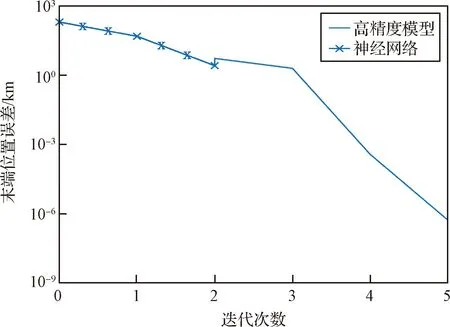
图12 “DNN+高精度”模型迭代修正过程Fig.12 “DNN+High Precision” iterative correction

图13 “DNN+高精度”模型修正后转移轨迹Fig.13 Trajectory correction based on “DNN+High Precision” model
4 结 论
本文面向GEO卫星空间碎片清除任务开展高精度转移轨迹智能制导技术的研究。首先面向GEO卫星空间碎片清除任务中的高精度转移轨迹修正需求,提出了基于深度神经网络的动力学模型参数快速预测方法,利用单个网络同时根据任务时间快速输出对应的太阳、月球星历以及根据GEO卫星的位置输出高阶地球非球形引力摄动加速度。蒙特卡洛仿真表明DNN方法的拟合平均误差优于3%。然后,基于预测校正制导方法提出GEO卫星的高精度轨迹修正架构,利用脉冲轨道机动优化GEO卫星的末端状态,并利用微分修正策略对轨道机动进行迭代修正,实现高精度的转移轨迹修正效果。基于所建立的DNN动力学模型参数估计网络对预测校正制导中的GEO卫星转移轨迹进行快速预测,并在此基础上提出DNN模型以及“DNN+高精度”模型两种轨迹修正策略。仿真结果表明,基于DNN模型的轨迹修正方法可大幅提高预测校正算法的效率,但是存在千米级的末端位置误差;而利用“DNN+高精度”模型的轨迹修正方法可保证轨迹修正精度(优于10-6km),且GEO卫星转移轨迹的修正效率比传统高精度模型高14.2%。
