一种利用LSTM-FCN的导弹舵回路故障诊断算法
2023-06-21程月华黄金龙
姜 斌,程月华,孙 颢,黄金龙
(南京航空航天大学自动化学院,南京 211106)
0 引 言
导弹是现代化战争中负责远程精确打击和战略威慑任务的主要武器之一,巡航导弹由于其机动性能好、命中精度高等优势,在局部战争中发挥的影响力正在不断提升[1-3]。
舵回路系统作为导弹姿态控制环节中的关键部分,舵回路故障将直接影响导弹控制性能,造成飞行失稳甚至坠落[4]。开展舵回路系统故障诊断研究,是确保导弹可靠飞行、完成战斗任务的重要保障。此外,舵回路系统结构复杂,涉及部件众多,且多个故障类型难以区分,给故障诊断工作带来了许多困难。因此实现导弹舵回路系统的故障辨识、定位及估计,实时监测系统的运行状态,对系统发生的故障及时进行识别,是提高导弹舵回路系统可靠性和安全性的有效途径[5]。
近年来,学者们在基于模型的导弹故障诊断方面开展了大量研究工作。曹祥宇等[6]借鉴解析余度的思想,利用导弹执行机构功能的冗余特性,针对导弹姿态控制系统的滚转、俯仰、偏航三个通道进行建模,并根据残差方程式获得的残差来进行故障诊断。针对导弹系统导引头与引信故障,姜秋华[7]以知识处理技术为基础,结合导弹系统故障树作为初始故障数据库,通过对比导弹系统实际测试值与数据库原先存储的相应指标参数(如频率、延时时间等指标)是否在正常范围内以实现故障诊断。受限于实际飞行过程中的不确定性因素和系统的非线性特性,该方法往往难以精确构建导弹飞行动力学模型,因此,基于模型的故障诊断方法难以实际应用于导弹系统。
随着人工智能技术的发展,基于数据驱动的故障诊断方法越来越受到专家学者们的关注。Qin等[8]提出了一种粒子群优化混合果蝇算法对反向传播神经网络进行了优化,解决了反向传播神经网络偏差过大的问题,并将其用于方向舵的故障诊断算法。Ni等[9]针对导弹故障信号易受噪声干扰的特点,采用小波变换对采集到的导弹故障信号进行降噪处理,并通过支持向量机对故障特征进行分类。崔乃刚等[10]针对飞航导弹,提出了一种基于多层次神经网络故障诊断和考虑饱和约束的在线再分配容错控制方法。在进行故障诊断时,首先采用卷积神经网络判断故障状态及发生部位,然后利用循环神经网络进行故障程度参数辨识。仿真结果表明该方法能够实现执行机构故障条件下飞行性能的保持。
魏晓绛等[11]针对导弹发动机中遥测数据难以提取故障特征的情况,采用小波分析获得信号的局部奇异值确定故障发生时刻,并利用模极大值去噪法处理原始数据,作为反向传播神经网络的数据输入,实现导弹系统故障辨识。李伟等[12]针对传感器故障导致导弹飞行参数与实际值产生较大偏差的现象,采用反向传播神经网络预测正常导弹气动模型下的传感器输出值,并与故障数据进行比对实现导弹传感器的故障诊断。
在故障诊断模型中,实时性是极为重要的一个指标,即当故障发生后,诊断模型应在尽可能短的时间内检测到故障的发生,以避免故障传播现象的发生,减小故障影响[13];此外,为了给故障诊断后续的容错控制及故障重构提供充分信息,集故障辨识、定位与估计于一体的导弹舵回路系统故障诊断框架也亟待设计。综上,由于现有的研究工作鲜有针对实时性的研究,且学者们没有将故障辨识、定位与估计形成一套系统的框架,此外大多智能故障诊断算法的准确率难以保证,本文提出一种基于LSTM-FCN的导弹舵回路系统故障定位、辨识与估计算法。首先搭建LSTM自编码器模型,提取舵回路系统飞行状态信号故障残差;然后,结合循环与卷积神经网络模型,提出基于LSTM-FCN的故障分类方法,建立导弹舵回路系统故障辨识、定位与估计模型,再由SE模块附加特征权值信息,实现了故障类型、位置、幅值的精确诊断;最后通过数字仿真与半物理仿真平台验证了所提出算法的有效性。
1 问题描述
1.1 导弹系统模型
定义导弹质心平动方程如下
(1)
式中:m代表导弹质量;P代表发动机推力;g代表重力加速度;X,Y,Z分别代表阻力、侧力、升力;α,β,θ,ψV,γV分别代表攻角、侧滑角、弹道倾角、弹道偏角和速度滚转角;V代表地速。
定义弹体坐标系下导弹绕质心转动的动力学方程
(2)
式中:Mx1,My1,Mz1为导弹所有外力对于质心的力矩沿弹体坐标系各轴的分量;Jxx,Jyy,Jzz为导弹各轴转动惯量;wx1,wy1,wz1为弹体坐标系相对地面坐标系的转动角速度w在弹体坐标系下各轴的分量。
此外,本文研究的导弹舵面分配为X型布置方案,如图1所示,采用四个舵机共同完成对于导弹滚转、俯仰、偏航三个姿态的控制[14]。

图1 导弹舵面分配示意图Fig.1 Missile rudder allocation
1.2 问题分析
一般而言,舵回路系统发生的典型故障类型主要包含卡死、松浮和缺损三种[15]。导弹舵回路系统不同类型、位置与幅值的故障在闭环系统中传播且相互影响、难以区分,给故障辨识、定位与估计模型的建立带来难题。学者们针对以上几类故障的辨识与定位开展了大量的相关研究,但目前针对导弹系统的主流故障诊断方法存在以下局限:
1) 目前主流的研究仅针对故障诊断的单一环节开展,针对如何将辨识、定位与估计融为一体的研究工作有待深入,且一体化框架下的网络搭建设计、参数调整、大规模数据处理与应用等难点待解决;
2) 准确率与实时性在故障诊断模型中通常难以同时保证,导弹系统作为高科技作战武器,需要快速且及时地诊断出舵回路系统发生的故障。
针对上述问题,本文拟提出一种基于LSTM-FCN网络的舵回路系统故障诊断方案,利用导弹飞行状态数据作为输入,经过残差生成后,基于LSTM-FCN网络实现舵回路系统快速准确的故障辨识、定位以及估计,最终输出导弹舵回路系统的故障诊断结果。
2 舵回路系统故障诊断框架
2.1 舵回路系统故障诊断算法框架
本节针对导弹舵回路系统故障数据参量耦合且故障初期阶段因特征不明显难以诊断的问题,提出了一种基于LSTM自编码器的故障特征提取与LSTM-FCN相结合的故障诊断算法。
LSTM-FCN网络结合了FCN的精确分类以及LSTM适合时间序列数据的特性,使用LSTM-FCN神经网络解决导弹舵回路系统故障辨识、定位与估计的优势可以总结为以下几点:
1)FCN网络能够高效地捕捉舵回路系统飞行状态信号的差别以实现分类,与LSTM结合更加适合处理复杂的时间序列数据分类任务;
2)LSTM-FCN网络面对不同的输入数据类型都有着较好的分类效果,因此,使用该网络建立导弹舵回路系统故障的辨识、定位与估计框架,能够显著减少额外的数据处理步骤,降低计算负担;
3)FCN网络相比CNN网络避免了重复存储和计算卷积的问题,具有更好的计算效率,面向实时性需求较高的导弹舵回路系统故障诊断任务具有良好的表现[16]。
综上,LSTM-FCN网络具有分类准确率高、不限制输入数据类型、计算效率高等特点,适用于解决导弹舵回路系统故障定位、辨识与估计任务;该算法在故障检测获得故障时间后,实现导弹舵回路系统的故障辨识、定位以及估计操作。
导弹舵回路系统未发生故障时,正常数据通过LSTM自编码器的映射关系未发生变化,残差接近于0;导弹舵回路系统发生故障时,异常数据信号无法经由LSTM自编码器得到有效重构,输出残差包含故障特征信息。从这个思想出发,使用LSTM自编码器生成残差反映数据特征,并输入LSTM-FCN网络中进行分类,最终实现故障的辨识、定位与估计,如图2所示。

图2 故障诊断流程图Fig.2 Fault diagnosis framework
1)基于LSTM自编码器故障检测算法获得故障发生时间tf,选取[tf-10 ms,tf+260 ms]的数据作为初始故障数据;
2)将初始故障数据输入LSTM自编码器,对自编码器的输入与输出数据进行比对生成残差;
3)将生成的残差输入故障辨识模块中,输出故障类型,即卡死、松浮、缺损故障;
4)选取对应故障类型的故障定位模型(卡死/松浮/缺损故障定位模型)输出故障舵面,即舵面编号1、2、3、4;
5)当输出故障类型为缺损故障时,选取对应故障舵面的故障估计模型(1号/2号/3号/4号舵面缺损故障估计模型)并输出其缺损程度,一共分为5级,定义如表1所示。

表1 故障程度与舵面剩余面积的关系Table 1 The relationship between the fault degree and the remaining area of the rudder surface
此处需要注意的是,为了保证故障诊断模型的实时性,故障辨识、故障定位与故障估计模型统一采用LSTM-FCN网络搭建,且输入数据形式保持一致以减小运算复杂度。
2.2 基于LSTM自编码器的故障残差生成
残差生成是故障诊断中的基础问题,目的是在充分利用导弹飞行状态数据时序信息的同时,提取能够对应不同故障类型、位置与程度的故障特征[17]。本节提出了基于LSTM自编码器的故障残差生成方法,搭建LSTM自编码器网络对状态数据进行预测,并生成残差获得故障特征。
1)自编码器数学模型
为了实现导弹舵回路系统准确的残差生成,使用自编码器对飞行状态信号进行重构,其不需要故障数据用来训练,且具有良好的重构性能以满足舵回路系统的残差生成需求。
自编码器作为一种无监督学习方法,由输入层、隐藏层以及输出重构层构成[18],其主要目标为将输入数据从高维空间压缩到低维空间,实现输入到编码的映射,构建出输入数据的主要特征。解码网络的主要目标为实现近似输出,通过将隐藏层低维数据映射到高维空间进行重构并使得误差最小化以达到复原原数据的目的。
自编码器训练的本质在于优化网络参数(权值矩阵与偏执向量)以使得输出ym尽可能与输入xm相似,通过最小化重构误差Jres来保证相似性,重构误差如下所示:
(3)
由于仅采用正常数据点对自编码器模型进行训练,经过训练后,自编码器能够重建正常数据点,并与原始数据之间保持一个较小误差,而当其重构一个异常数据点时,误差会远大于正常情形。
2)LSTM自编码器设计
自编码器的目标是提取数据中最重要的特征和结构,而结合LSTM网络,其可以捕捉导弹飞行状态数据中的时序关系,并以降噪的低维形式进行重构,最终实现导弹数据的残差生成。
LSTM自编码器仍然是一个多层次结构,其编码器和解码器都为LSTM模型[19]。基于编码器部分对导弹状态冗余信息进行压缩,从而获得系统状态信号的最小表达,并通过解码器部分根据最小表达解压反算出原信号[20]。LSTM自编码器的结构如图3所示。
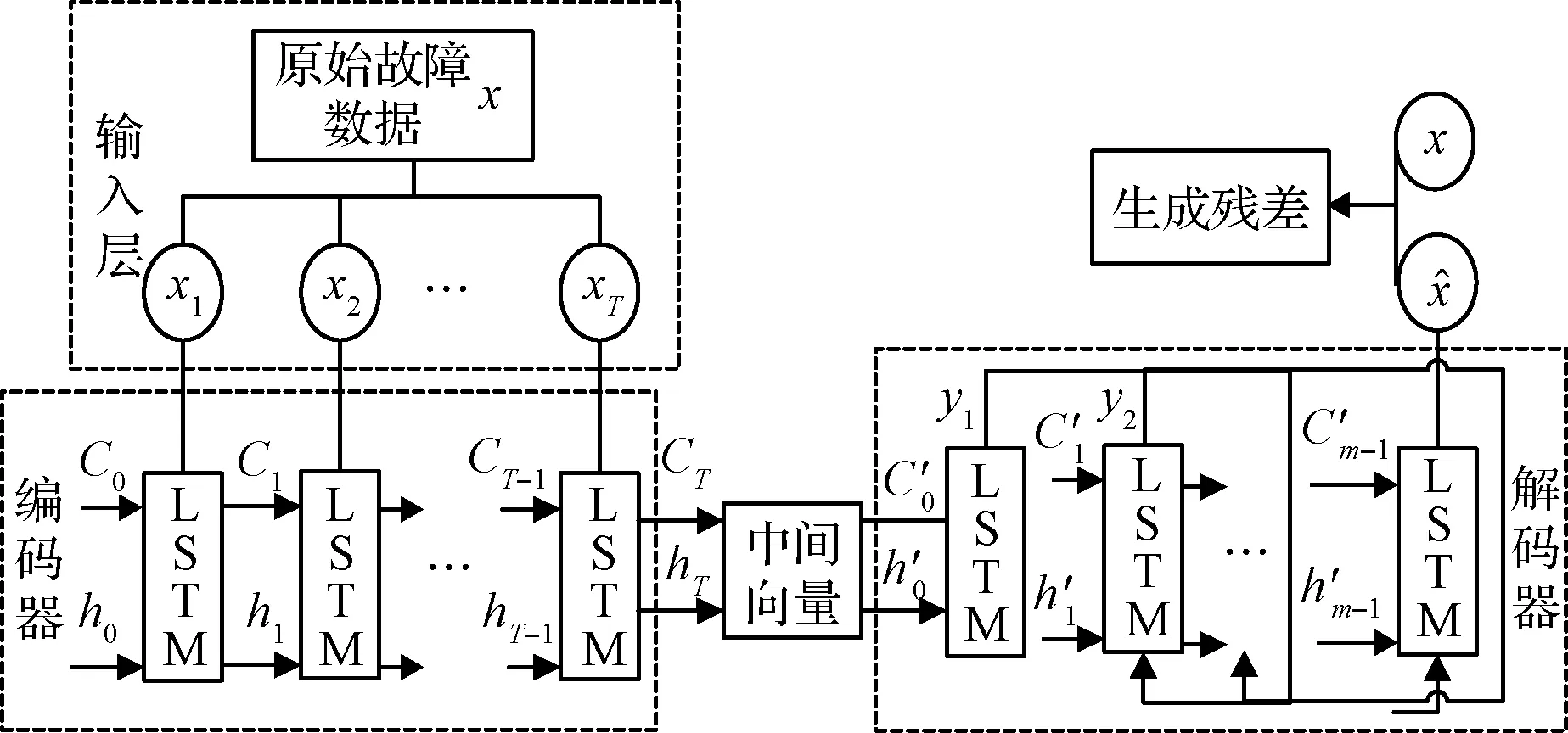
图3 LSTM自编码器网络结构Fig.3 Structure of LSTM-autoencoder

基于LSTM自编码器模型的故障特征信息提取的具体流程为:
1)采集10组导弹系统正常飞行状态数据作为原始数据集,每组数据包含10 000个数据点,即总共100 000个健康样本点,数据步长为5,将原始数据分为训练集与测试集(测试集占比30%),其中归一化采用鲁棒归一化方式进行。
2)搭建LSTM自编码器,其中隐藏层节点数设置为32、16、16、32,共计四层网络,每层网络采用ReLU激活函数并基于adam优化器进行训练,采用均方误差(MSE)作为指标,其数学表达为
(4)




图4 LSTM自编码器的故障特征信息提取结果Fig.4 Extraction results of fault feature information from LSTM autoencoder
从图4可以看出,无故障情况下,LSTM自编码器对于滚转角数据拟合效果较好;在故障情形下,样本点间的映射关系被破坏,故障数据无法经由自编码器得到有效重构,残差波动幅度有明显变化,不同故障类型在重构后的残差分布具有明显的差异特性,表明LSTM自编码生成的残差能够成功反映故障类型。同理,如图5所示,不同故障位置、不同故障幅值情况下残差的概率密度分布也不尽相同,证明了故障特征提取方法的有效性,对残差进行故障特征提取,可以明显区分故障信息,建立故障分类模型,为后文利用LSTM-FCN网络准确实现故障诊断奠定基础。
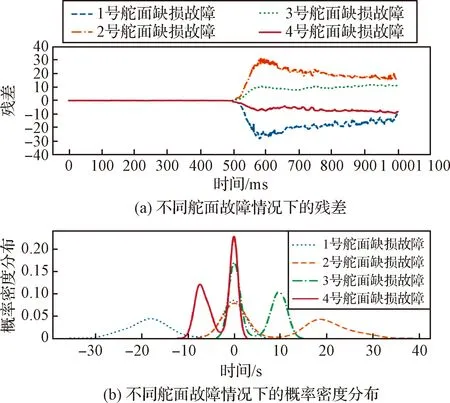
图5 不同舵面故障情况下的残差与概率密度分布Fig.5 Residual and probability density distribution under different rudder surface fault conditions
3 基于LSTM-FCN的舵回路故障诊断算法
本节将基于LSTM自编码器提取的故障残差特征,应用LSTM-FCN网络结合SE模块,进行导弹舵回路系统的故障辨识、定位与估计研究。
3.1 全卷积神经网络
全卷积神经网络(FCN)作为传统CNN的拓展,相较于CNN,其将网络中的全连接层全部替换为卷积层,其使用了输入数据的所有局部特征,而卷积层输入尺寸是任意的,其只连接输入数据中的一个局部区域,并且在卷积层中的神经元共享参数[21]。
针对CNN计算效率不足以及存储开销大的缺点,FCN的全卷积层设计可以在一定程度上提升运算速度。FCN在处理时间序列的分类问题上有着较好的表现,作用相当于一个特征提取器,数学描述定义如下
yt=Frelu(FBN(Wfcn⊙xt+bfcn))
(5)
式中:Wfcn,xt,bfcn分别对应FCN在t时刻的权重矩阵、输入向量以及偏置量;⊙表示卷积运算,并且在每个卷积模块后都会附加一个批量标准化层(BN)和ReLU激活函数层,用Frelu表示;BN层的作用为沿着通道维度计算均值与方差并对输入数据进行归一化操作,用FBN表示,其使得输入在规范化后拥有大致相同的权重分布,可加快模型收敛速度以及提高泛化能力。
3.2 LSTM-FCN网络结构
图6为LSTM-FCN网络模型的结构示意图,由LSTM模块与FCN模块共同构成,两模块经过连接处理后,输入Softmax中进行故障诊断分类操作。假设输入多变量时间序列维度为(n,ΔT,m),其中n为数据集样本个数,ΔT为时间步长,m为样本变量个数。

图6 多变量LSTM-FCN网络结构Fig.6 Multivariate LSTM-FCN network structure
本文在FCN网络中添加了压缩激发(SE)模块,其可以通过计算所有通道特征权值信息,增强或削弱相应的通道信息影响以提高特征辨别能力,实现网络自我学习能力的改善,提高故障诊断结果的精度,进而使得网络能够通过学习全局信息来有选择性地强化有用的特征并对不明显的特征进行抑制[22]。
1)LSTM模块
在舵回路系统故障辨识与定位网络中添加LSTM模块,可以捕捉飞行时间序列数据中的时序信息,提升故障诊断精度。
所提LSTM模块中,输入层数为1,隐藏层节点数为64。当输入数据进入LSTM单元时,首先需要进行维度打乱操作,其可以在一定程度上提升模型的训练性能,使得模型能够学习到较长时间序列中的特征关系[23];此外还使得LSTM输入数据被赋予了每个变量的全局信息,减小了运算时间。在LSTM模块最后,为了减小过拟合现象,附加一个Dropout层。
2)FCN模块
FCN模块的加入使得网络能够快速实现分类操作以实现舵回路系统的故障辨识与定位,本文采用时域卷积网络(Temporal convolutions network,TCN)代替传统的CNN进行时序数据建模以达到更好的特征提取效果。
FCN模块由三层TCN构成,其中每层滤波器数量设置为128、256、128,卷积核尺寸定义为8、5、3,同时在每个卷积层后增加一个BN层,并随后采用ReLU函数进行激活。
此外,由于SE模块的特征辨识增强特性,本论文在前两层TCN中设计附加层SE以提高模型效能,SE模块作为一个子结构,可以通过网络根据损失学习特征权重,在导弹故障诊断任务中,可以在满足计算实时性的条件下极大程度提升智能诊断的准确性,SE模块将FCN模块输出的导弹飞行状态时序数据如下式进行压缩操作
(6)
式中:T为时间维度;uc(t)为TCN网络的输出,通过sigmoid门机制完成激发操作并在卷积通道维度上重新分配原始特征的权重,以提高故障诊断的精度。
当进行三层卷积操作后,本文使用GAP层来代替基础的全连接层,其作用为对于网络从结构上做正则化以防止过拟合现象的发生,并减小FCN模块输出参数的个数以便于之后的级联操作。采用上述FCN模块,结合一维卷积、池化和批量标准化操作,可以从飞行状态信号中提取关键故障特征,逐级捕获时序数据中的底层、高层信息。
3)模块级联与Softmax分类
基于LSTM模块与FCN模块提取时序数据中不同维度的特征信息,经过级联处理后,可以获得更为精确的故障特征作为故障诊断模型的分类依据,再输入Softmax模块中进行数据集的分类操作。
Softmax是多分类问题的一种常用解决方法,应用逻辑回归预测每种类别的概率[24]。假设一组输入数据为{(x1,y1),(x2,y2),…,(xn,yn)},其中y1,…,yn∈{l1,l2,…,lk},lj,j=1,2,…,k,代表数据的类别,n个数据对应有k种类别,则经由Softmax计算输入数据xi属于类别lj的概率公式为
(7)
式中:θi为第i个类别对应的训练参数。对于故障诊断分类问题而言,选取最终预测概率值最高的类别作为结果并输出。
4)损失函数设计
针对故障诊断分类问题,损失函数L基于交叉熵进行设计
(8)
式中:N为数据集样本个数,p(yi)代表对应于某个类别i的概率。
4 实验设计与算法验证
4.1 舵回路数字仿真模型
舵回路数字模型输入信号为舵偏角控制指令,输出信号为舵实际偏转角度。舵回路模型采用二阶线性环节进行模拟,如图7所示。

图7 舵回路数字模型Fig.7 Digital model of rudder loop
其中位置限幅范围为[-45°,45°],速度限幅范围为60 (°)/s,其中二阶线性环节的传递函数定义为
(9)

4.2 实验模型参数与评价指标
1)实验数据集与参数设置

表2 数据集统计信息Table 2 Dataset statistics

4.3 仿真结果分析
考虑到舵回路系统智能故障诊断模型需要准确的仿真数据提供支持,本文以Simulink为仿真平台,搭建导弹系统数字模型,其包含弹体、发动机、舵回路、大气环境、控制与制导模块。此外,为了分析实际环境下条件不确定性对故障诊断模型的影响,本节考虑将导弹系统气动参数与导弹质量视为不确定性条件,探究在条件不确定性小于10%的情形下,数据变化对故障诊断模型诊断效果的影响,即在仿真中分别设置气动参数C与质量M的不确定性偏差为±10%时,分析条件不确定性对故障诊断的影响。
本文使用混淆矩阵来直观地显示算法仿真结果,其作为机器学习中分类模型的情况总结表,以矩阵的形式表明分类模型的预测输出标签与实际样本标签间的关系,其中矩阵的列为预测标签值,行为实际标签值。混淆矩阵对角线的值代表分类正确的数量占该类样本的比例,而非对角线元素则表示被误判的部分[25]。
1)故障辨识结果
首先对故障辨识模型进行仿真,图8为故障辨识模型的混淆矩阵图,经过100次训练后,训练误差降至0.05以下,从混淆矩阵中可知,除去3%的卡死故障样本点被误判为缺损故障,其余故障类型都能被正确辨识,表明了故障辨识方法的有效性。

图8 故障辨识模型混淆矩阵Fig.8 Fault identification confusion matrix
2)故障定位结果
接着基于故障辨识结果,对卡死、松浮以及缺损故障定位模型进行训练,图9为三个故障定位模型的混淆矩阵图,从图中可以看出,三种故障下的故障定位结果准确率均为100%,即所有故障舵面全部被精准定位,验证了基于LSTM-FCN分类的精确性。
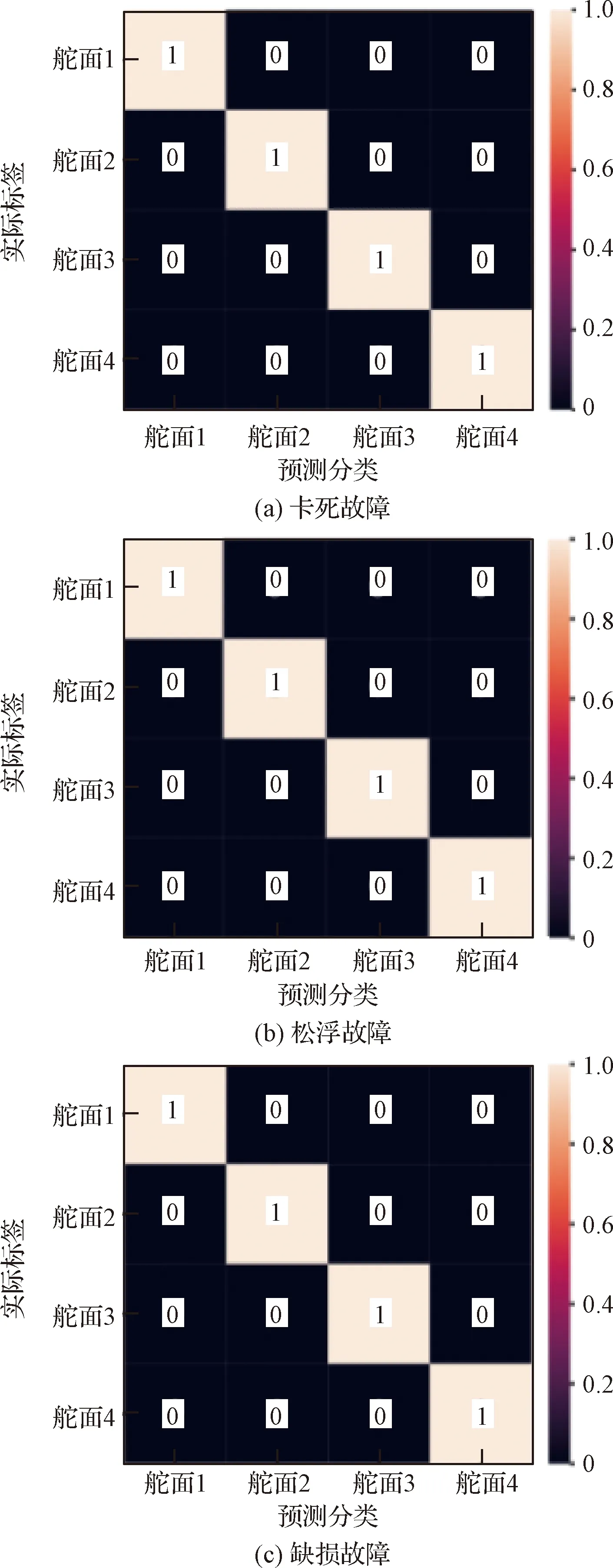
图9 故障定位模型混淆矩阵Fig.9 Fault location confusion matrix
3)故障估计结果
最后当故障辨识结果为缺损故障时,基于故障定位模型输出的故障舵面编号,选择对应的某个舵面的故障估计模型进行预测,图10分别为四个舵面故障估计模型的混淆矩阵图,由混淆矩阵可知,除去由于边界导致近邻幅值标签被误判的情况,四个故障估计模型的估计准确率均能达到98.5%以上,表明能够较好地完成故障幅值估计任务。
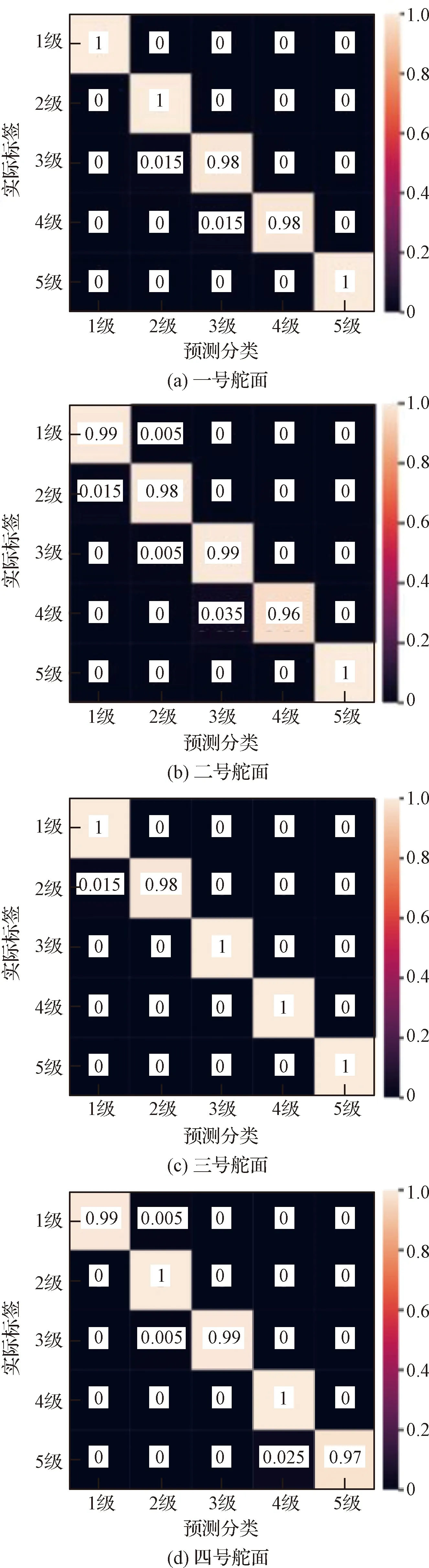
图10 舵面缺损故障估计模型混淆矩阵Fig.10 Confusion matrix of rudder surface defect estimation
4)故障诊断模型评价指标结果
图11(a)(b)(c)分别表示故障辨识、定位与估计模型的评价指标结果,从图中可知本节所提方法具有良好的分类性能,其中三个故障定位模型的精确率、召回率与F1分数全都为1,其余分类模型的精确率最低为0.987,基本都在0.99以上,表明了基于LSTM自编码器提取故障特征再输入LSTM-FCN网络故障诊断的方法能够实现故障辨识定位与估计的准确性要求。

图11 故障诊断模型指标分数Fig.11 Fault diagnosis model metric scores
图11(d)为不同方法应用于故障辨识模型时的评价指标结果,其中残差神经网络(ResNet),多尺度调节卷积神经网络(MCNN)为时间序列分类问题中的常用方法。从图中可以看出,本节所提算法的精确率、召回率与F1分数都优于其余算法。
由图11可知,本文提出的改进的分类模型较传统算法有着更高的准确率,对比ResNet与MCNN模型,本章所提算法的故障分类精确率分别提升了将近8%与10%,使得导弹舵回路系统的故障类型、故障位置和故障幅值都得到了准确分类,解决了故障初期阶段特征不明显难以诊断的问题。
表3为条件不确定情况下故障辨识、定位与估计准确率,由表可知在模型发生10%偏差情况下,故障诊断精确率有所下降,但仍维持在98%以上,表明了本文所提故障辨识、定位、估计模型的有效性,在10%的不确定性偏差以内能够保持较高的分类精确率,证明了算法的工程实用性。

表3 条件不确定情况下故障辨识、定位与估计准确率Table 3 Accuracy of fault identification, location and estimation under uncertainty
图12为本节所提算法的平均时间复杂度,即基于在线数据进行实时故障诊断,利用已训练好的故障诊断模型多次仿真计算故障辨识、定位、估计模型的运行时间,再取平均值作为最终的时间复杂度衡量指标,需要注意的是,所有故障诊断模型基于GPU3080条件进行仿真运行。从图中可以看出,由于故障辨识、卡死、估计模型全部基于LSTM自编码器与LSTM-FCN方法构建,因而平均时间复杂度基本保持一致,位于40 ms左右,在此基础上,加入故障检测时间以及故障诊断所需数据集花费的时间,合计故障诊断时间大致在400 ms,满足导弹舵回路系统故障诊断的实时性要求。

图12 故障诊断模型时间复杂度Fig.12 Time complexity of fault diagnosis
4.4 半物理仿真平台算法验证与结果分析
1)半物理仿真平台
为验证本文所提故障辨识、定位、估计模型的工程适用性,本小节基于导弹舵回路系统半物理仿真平台,结合飞行状态数据验证诊断模型的有效性。
导弹舵回路系统半物理仿真平台架构包括导弹系统半物理平台、数据库与上位机三个模块。其中导弹舵回路系统半物理平台由Simulink数字仿真平台、电机驱动器、伺服电机、舵面及舵面加载系统构成,图13为半物理平台中的舵面环节。
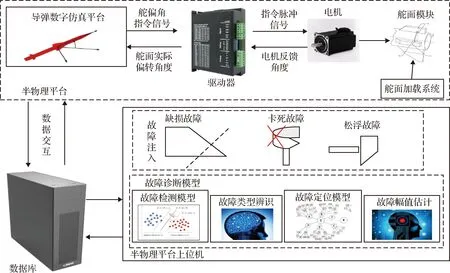
图13 半物理仿真回路示意图Fig.13 Schematic diagram of semi-physical simulation loop
舵回路系统包含导弹X舵的四个舵面、舵面加载环节以及电机系统。半物理平台负责导弹实际舵回路系统的模拟,生成飞行状态数据等信息并通过数据库传输至上位机,以供故障诊断模型及可视化界面使用。上位机系统由初始化、故障注入、故障诊断以及可视化模块构成,通过故障诊断模型处理导弹系统飞行状态数据与舵回路采集信息,最终实现舵回路系统的故障辨识、定位以及估计。
2)半物理试验与分析
采用半物理仿真系统验证故障诊断结果如表4所示。

表4 半物理仿真平台故障诊断效果Table 4 Fault diagnosis performance of semi-physical simulation platform
由表4可知,基于本文提出的LSTM-FCN故障诊断模型,在半物理平台产生的飞行状态数据上进行验证,指标分数均在96%以上,相比数字仿真平台结果有准确度的下降,其原因在于半物理平台模拟了复杂的高阶非线性系统,其非线性环节存在误差,且平台间通信有延迟,存在采集噪声,以上原因共同导致了算法精确度的下降。
5 结 论
随着导弹作战环境危险性以及作战任务复杂性的提升,建立统一的智能模型来实现导弹故障辨识、定位与估计变得更加重要。本文针对导弹舵回路故障诊断问题,基于故障检测结果,搭建LSTM自编码器模型获得导弹系统正常状态的预测模型,通过计算模型输出与实际值的残差实现导弹飞行状态数据故障特征的提取,在此基础上考虑飞行状态的时序特性,提出基于LSTM-FCN的故障诊断模型,保证了能够有效利用残差数据的时空特性。进一步地,采用SE模块增强故障特征的有用权值信息,再由Softmax实现故障诊断,并最终设计了故障辨识、定位、估计的顺序诊断模型。数字仿真以及半物理仿真平台的验证结果表明,该算法应用于导弹舵回路时能够高效地实现系统中多类故障的检测与故障定位,结果准确率高且实时性强,具有重要的参考价值和应用前景。
