基于深度学习的油气水多相管流量预测研究
2023-06-18李雪莹
李雪莹
中国石油大学(北京)
准确测量油气水混合物[1]的流量对于油气行业的效率提高、成本降低和管理优化具有重要意义。传统的测量方法是先使用分离器分离混合物的组分[2-4],再分别用传统的单相流量计测量各相的流量。这种方法在实践中存在许多不足和限制:由于多相流分离过程通常需要几个小时甚至更长的时间,测量的效率将受到严重制约;且分离器昂贵,还占用大量空间,导致成本显著增加。
近年来,随着机器学习(machine learning,ML)的发展及其在许多领域的成功应用,越来越多的研究将ML与多相流测量相结合。文献[5]提出了一种基于多传感器和支持向量回归(support vector regression,SVR)算法的油田油气水多相流量量化检测方法。该方法基于文丘里和微波检测手段对气相、液相流量和液相含水率等多相流关键参数进行测量,并结合SVR 进行测量模型构建和评价。然而SVR 模型性能有限,当处理油气水多相转移预测时精度较低。文献[6]以入口体积含气率、转速和液相流量作为输入特征,构建基于线性回归、BP神经网络、支持向量机和随机森林的4种机器学习模型。但该模型主要以研究离心泵气液两相压力升高预测为研究对象,无法直接移植至油气水三相混合状态预测中。文献[7]研究了基于磁共振技术的多相流在线检测方法,设计高集成磁共振谱仪系统及硬件装置,并开展室内实验及现场应用。该方法能实现油、气、水三相全量程高精度检测,但该方案中设计的装置增加了测量的成本。综合以上分析,尽管目前大部分方法适用于对动态多相流试验条件下的传感器数据的分析,但将其成功应用于实际工业过程仍然很困难。大部分研究集中于固定油气水场景,未考虑两相及三相之间的转移场景。为此,建立了一种基于深度学习的多相流量预测模型,从而实现不同场景下的多相流的流量预测。
1 试验环境
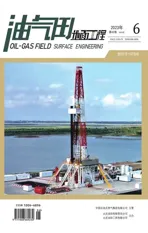
本次试验所用多相流测试试验机理如图1 所示。为了建立尽可能接近工业环境的实验环境(即带压力的密封管道),试验时关闭释放阀并启动空气压缩机,为整个系统提供合理的静态压力。油水单相流分别由油泵和水泵从分离器中抽出,气体单相流由循环压缩机提供。单相流量计记录所有单相流量的参数,改变控制阀的开度可以调节相应单相流的流量。多组单相流混合形成多相流,并通过测试中的多相流量计(multiphase flow meters,MFM)记录混合流结果。试验结束后,多相流将进入分离器分离成单相流,可实现再次循环使用。
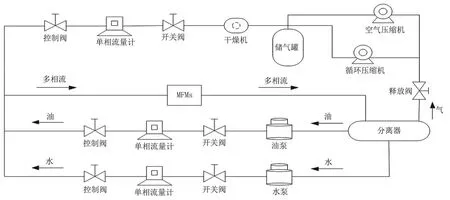
图1 多相流测试实验机理Fig.1 Experimental mechanism of multiphase flow test
试验过程中,将文丘里管安装在图1 的“MFMs”位置,从而收集通过水平管的多相流信息。多相流信息主要包括:测量并记录动态压力p、会聚部分的压差Δp1、发散部分的压差Δp2和温度T。其中,Δp1和Δp2的测量范围为0~62.2 kPa。带有4个不同传感器的文丘里管结构图如图2所示。

图2 带有4个不同传感器的文丘里管结构Fig.2 Venturi tube structure with 4 different sensors
2 数据采集
考虑到目前市场上没有准确可靠的MFM,因此在试验期间无法获得多相流瞬时参数的标准值,唯一可用的信息是单相电表记录的数据。在周期S内,通过单相流量计的单相流液体的总体积非常接近通过文丘里管中多相流的液相总体积因此,本试验中将数据采集问题转换为预测周期S内多相流的平均流量,而不是瞬时流量。此时,液相和液体单相流的平均流速之间的绝对误差εv的绝对值上限如下所示:
式中:r为管道横截面的半径,m;l为单相流量计和文丘里管之间试验管道的长度,m。
|εr|的上界随着S的增加而减小。因此,当S足够大时,可以使用来近似。S取5 min。
根据液相介质的不同,将试验分为3 组:①水-空气两相流;②油-空气两相流;③油-水-空气三相流。有关试验条件的参数设置如表1 所示,其中γ为水液比,计算公式如下:

表1 有关试验条件的参数设置Tab.1 Parameter settings related to test conditions
式中:vw为水的体积,L;vl为液相体积,L。
在两相流试验中,每个单相流的流量每2 min改变一次;在三相流试验中,每个单相流的流量每3 min 改变一次。同时,在每个试验条件下收集由稳定单相流和瞬态单相流形成的多相流的数据。
本试验选择多通道压力信号(p、Δp1和Δp2)的时间序列数据作为预测模型的输入,可以通过测量文丘里管的多相流的流量来获取数据。传感器的采样频率为6 Hz,周期S的长度为300 s。每个时间序列数据都是一个1 800×3 的矩阵。试验数据采集过程耗时约100 h,共采集3 500 个水-空气两相流动样本、3 500 个油-空气两相流动样本和2 500个油-水-空气三相流动样本。
3 流对抗网络
3.1 模型约束
本研究的目标是建立一个流量预测模型,该模型可以根据pt准确预测。一般情况下,预测模型通常包括2 个部分:特征提取器E(p;θt)和标签预测器P(f;θp)。输入信号p可通过特征提取器E(p;θt)映射为特征向量f,具体描述如下:
式中:θe为特征提取器的参数。
P(f;θp)可以根据特征向量f预测标签(流量),公式如下:
3.2 模型结构
源域数据集ps和目标域数据集pt可以通过特征提取器E(p;θe)分别映射到源域特征向量fs和目标域特征向量ft。同时,fs和ft分别服从源域特征分布fs和目标域特征分布ft,即fs~Fs(f)和ft~Ft(f)。如果E(p;θe)仅通过源域样本学习,则由于源域和目标域的数据分布之间的差异,特征提取器很难捕获目标域样本的正确描述。当标签预测器P(f;θp)根据f确定流量时,该误差将导致目标域预测精度下降。因此,本研究期望E(p;θe)产生域不变和流量辨别特征。Fs(f)和Ft(f)应尽可能相似。P(f;θp)可以在f的基础上准确地预测流量。
为此,引入域鉴别器D(f;θd) 来帮助特征提取器采集域不变特征。域鉴别器中的输入为特征f,则域鉴别器函数定义如下:
参考生成对抗网络[8](generative adversarial network,GAN),所提流对抗网络中的鉴别器也可以测量Fs(f)和Ft(f)之间的距离。如果域鉴别器产生的域标签d^ 与实域标签d相同,则表明fs和ft之间存在较大差异;相反,如果域鉴别器不能正确地对fs和ft进行分类,则表明fs和ft之间的差异可忽略。流对抗网络框架如图3所示。

图3 流对抗网络框架Fig.3 Flow adversarial network framework
该网络包括3 个部分:特征提取器E(p;θt)、标签预测器P(f;θp)和域鉴别器D(f;θd)。模型执行过程中,可通过最小化损失函数实现域鉴别器D(f;θd)区分源域和目标域特征。该过程中损失函数定义如下:
特征提取器、标签预测器和域鉴别器网络配置如表2 所示。conv 表示卷积层;max-pool 表示最大池化层;fc 表示全连接层;SELU为自归一化神经网络激活函数;LINEAR为线性激活函数。

表2 特征提取器、标签预测器和域鉴别器网络配置Tab.2 Network configuration of feature extractor,tag predictor and domain discriminator
4 实验与分析
4.1 数据集与实验环境
为验证基于深度学习的多相流量预测模型有效性,对多相流测试试验及采集的数据进行试验分析。试验过程中软件环境为pycharm 搭建算法框架,并由python 基于tensorflow 搭建基础网络。算法运行硬件环境为酷睿i7 CPU;内存为128 G ARM的联想服务器;操作系统为Ubuntu 18.04 64位;显卡为NVIDIA RTX2080Ti 11G。
4.2 试验过程
训练时采用SGD 优化器[9]训练模型,试验时部分参数定义如下:深度学习网络中批量大小设置为32;初始学习率为10-2;学习率衰减率为10-1;学习率衰减周期设置为1 000;最大迭代次数设置为30 000。
4.3 性能分析
4.3.1 训练性能
对比了主流CNN[10]、域对抗网络[11](domain adversarial network,DAN)和基于深度学习的多相流量预测模型在水-空气两相流转移到油-水-空气三相流场景中的训练性能。对比指标为平均绝对百分比误差(mean absolute percentage error,MAPE)。水-空气两相流转移到油-水-空气三相流场景训练曲线如图4所示。该场景下,CNN在源域数据集上的最小MAPE在15%以上,在目标域数据集上的MAPE在20%以上。分析原因,CNN学习了许多源域数据集的特征,这有助于提高源域样本的准确性,但降低了目标域样本的性能。与之相反,基于深度学习的多相流量预测模型在源域样本上产生的MAPE 约为7%,但在目标域样本上的相对误差约为10%。根据MAPE曲线的物理含义,其值越低表明模型拟合能力越好。实验结果表明,所提基于深度学习的多相流量预测模型具有较强的泛化能力和学习能力。域鉴别器使特征提取器有效学习域不变特征,从而获得更优的训练性能。
图4 水-空气两相流转移到油-水-空气三相流场景训练曲线Fig.4 Training curve of water-air two-phase flow transferring to oil-water-air three-phase flow scene
4.3.2 综合性能
为了评估所提流对抗网络有效性,考虑了3种不同的转移场景,即从水-空气两相流转移到油-水-空气三相流(试验1),从水-空气两相流转移到油-空气两相流(试验2),以及从油-空气两相流转移到油-水-空气三相流(试验3)。为消除随机误差带来的干扰,每组试验分别是进行10 次,取平均值作为最终结果。
试验时分别对比了CNN、DAN在3个评估指标中的综合性能性能:平均绝对误差(mean absolute error,MAE)、平均绝对百分比误差和均方根误差(root mean squared error,RMSE)。其中,MAE 反映了实际值和预测值之间的差异,且对异常值非常敏感;MAPE 是衡量系统准确性的评估指标;RMSE可根据平方误差和结果值的相对大小来描述模型拟合性能。3 个误差度量分别根据以公下式计算:
式中:yt为时间t时的实际值时间t时的预测值;N为样本数量。
不同场景下各模型综合性能如表3所示。可以看出,基于深度学习的多相流量预测模型性能最优。3个试验场景中,基于深度学习的多相流量预测模型MAPE 分别为8.41%、11.05%和9.08%,与CNN 和DNN 相比,基于深度学习的多相流量预测模型MAPE 减少约2%至10%。同理,MAE 与RMSE指标,基于深度学习的多相流量预测模型均为最优。因多相流数据特征复杂,传统CNN 模型以及DAN 模型无法更深层次理解特征与特征之间的关系。而基于深度学习的多相流量预测模型可以有效提升提取特征之间的关键信息。试验结果验证了基于深度学习的多相流量预测模型的可行性和有效性。

表3 不同场景下各模型综合性能Tab.3 Comprehensive performance of each model under different scenarios
5 结论
为准确测量油气水混合物的流量,对油气水多相管流量预测进行了研究与分析,建立了一种基于深度学的多相流预测模型。设计了试验环境与数据采集方案,为多相管流量预测提供数据基础。提出了一种流对抗网络模型,实现了水-空气两相流转移到油-水-空气三相流,水-空气两相流转移到油-空气两相流,以及从油-空气两相流转移到油-水-空气三相流3 种场景下的流量预测。该模型为多相流数据分析及流量预测的发展提供了一定借鉴作用。
未来可对数据安全管理领域进行研究,如引入区块链、云计算等技术提高多相流数据交互可靠性及效率。此外,可对深度学习网络参数优化及网络压缩等方向进行研究,从而减轻模型计算压力,节省计算开销。