电动叶菜多功能采收机切割机构设计与仿真优化
2023-06-15吴稳胡良龙王公仆王云霞黄赟徐锦大
吴稳 胡良龙 王公仆 王云霞 黄赟 徐锦大
摘要:針对绿叶菜收获拟采用双动刀往复式切割器进行结构设计,并基于切割图进行切割器性能优化。通过分析切割图中一次切割区、重割区和漏割区对切割性能的影响,确定漏割区面积为0、重割率最小时割刀切割性能达到最优,以此为依据对切割器进行优化设计。针对现有切割图绘制与分析方法不能同时兼顾高精度和易操作的问题,综合运用SolidWorks和Adams软件进行切割图绘制,并使用Image-Pro Plus软件获取图中数据对切割图定量分析与评价。针对现有切割图评价指标不能显著反映刀片尺寸参数和割刀运动参数共同影响切割性能变化问题,提出以漏割距离、重割率为评价指标来反映三区域的变化,并以此为目标值,基于现有刀片尺寸参数优化其切割性能。研究提出采用切割图绘制、分析、评价方法进一步优化切割性能,分析割刀尺寸参数(刀片前宽、刀片高度、刀片节距)和切割器运动参数(切割速比)对漏割距离和重割率的影响,采用Box-Behnken中心组合试验设计理论进行四因素三水平仿真试验。试验结果表明,刀片前宽、刀片高度、刀片节距、切割速比对漏割距离和重割率均有显著影响。参数优化结果:当刀片前宽为5 mm、刀片高度为32 mm、刀片节距为30 mm、切割速比为0.7时,漏割区面积为0、一次切割率为88.26%、重割率为11.74%,与优化前相比,漏割面积仍为0,但一次切割率提高了6.18%,重割率降低了6.18%。
关键词:多功能采收机;绿叶菜;往复式切割器;切割图;响应面法
中图分类号:S225.7+1
文献标识码:A
文章编号:2095-5553 (2023) 04-0007-11
Abstract: The structure of the double-acting reciprocating cutter intended for green leafy vegetable harvesting was designed, and the performance of the cutter was optimized based on the cutting diagram. By analyzing the effect of the single cutting area, the repeat cutting area and the uncut cutting area in the cutting diagram on cutting performance, it is concluded that the cutting performance of the cutter is best when the area of the uncut cutting area is 0 and the rate of the repeat cutting area is minimal, this is used as a basis for optimizing the design of the cutter. To address the problem that the existing methods of drawing and analyzing cutting diagrams do not combine high accuracy and simple operation, combining SolidWorks and Adams to draw cutting diagrams, and using Image-Pro Plus software to identify and measure the relevant data in the cutting diagrams to quantitatively analyze and evaluate the cutting diagrams. In order to solve the problem that the existing cutting diagram evaluation index does not significantly reflect the change of cutting performance under the joint influence of dimensional and kinematic parameters of the cutter, it is proposed to use the distance indicating the uncut area and the rate of the repeat cutting area as evaluation indexes to reflect the changes of the three regions in the cutting diagram, and using these two evaluation indexes as target values, optimizing the cutting performance of the existing double-acting reciprocating cutter. The study proposes to use this method of drawing, analyzing and evaluating cutting diagrams to further optimize cutting performance, analyzing the effect of the cutters size parameters (width of moving blade front end, height of moving blade cutting edge, blade spacing) and motion parameters (cutting speed index) on the distance indicating the uncut area and the rate of the repeat cutting area, using Box-Behnken central combinatorial experimental design to conduct a four-factor and three-level simulation test, the experimental results show that width of moving blade front end, height of moving blade cutting edge, blade spacing and cutting speed index have significant effects on the distance indicating the uncut area and the rate of the repeat cutting area. Parameter optimization results showed that when width of moving blade front end was 5 mm, the height of moving blade cutting edge was 32 mm, the blade spacing was 30 mm, and the cutting speed index was 0.7, the area of the uncut cutting area was 0, the rate of the single cutting area was 88.26%, and the rate of the repeat cutting area was 11.74%. Compared with the results before optimization, the area of the uncut cutting area was still 0, but the rate of the single cutting area was increased by 6.18% and the rate of the repeat cutting area was reduced by 6.18%.
Keywords: multifunctional harvester; green leafy vegetable; reciprocating cutter; cutting diagram; response surface method
0 引言
在叶菜生产过程中,收获作业约占整个作业量的40%以上,最为费时耗力[1-4],故研制性能优异可靠的叶菜收获装备对农业发展、民生改善具有重要意义[5-6]。切割器作为叶菜收获装备的核心部件之一,其性能优劣在叶菜收获损伤、漏收损失、割茬整齐、作业噪声等方面均具有极大影响,决定着整机的作业质量。切割器依据运动形式可分为圆盘旋转切割、带(链)式回转切割、往复式直线切割等类型,其中往复式切割器在鸡毛菜、甘薯茎尖、菠菜、苋菜等绿叶菜收获中应用广泛,本文基于切割图进行往复式切割器的性能优化研究,对提升叶菜收获质量、保证叶菜品质具有重要意义。
研究割刀的切割效果一般可从作物的生物学特性、割刀切割性能以及二者间耦合作用这几方面着手[7],而往复式切割器的工作性能一般通过绘制、分析切割图来评价[8]。通过分析切割图中各区域分布,可判断切割质量和割茬高度的一致性以及切割阻力和功率消耗的大小[9-11]。
传统的绘制方法为手工描点法,操作繁琐且精度低。徐秀英等[12]使用AutoCAD绘制不同切割速比下的切割图,研究双动割刀的切割效果,但基本原理与传统方法一致,只是凭感官作定性分析。夏萍[9]、Su[13]等结合MATLAB软件绘制切割图,对不同工作参数或工况下的切割图作定量分析;张家年[14]借助电子计算机使用解析法对切割图进行数值计算,定量分析切割质量;殷晓飞[15]、赵匀[16]、向阳[17]等通过编制计算机程序实现切割图的自动绘制与分析。使用MATLAB和计算机编程的方法绘制切割图虽然精度高,但操作复杂且投入的时间成本过多。宋占华[18]、杜哲[19]等使用Adams软件绘制往复式切割器切割图进行参数优化,但只生成了端点轨迹,仍需后续人工补齐才能分析。切割图的准确绘制是研究往复式切割器切割性能的基础,而上述方法均不能很好地兼顾准确性、便捷性、简易性。
已有研究通常将三区域面积或比率作为切割图评价指标,研究其与刀片尺寸参数和运动参数的关系,但三区域面积或比率只与切割图中部分要素有显著关系。夏萍等[9]以重割区和漏割区面积为指标研究各尺寸参数对切割器性能影响时发现动刀片宽度和前桥宽度对目标值影响不显著,导致参数优化有失偏颇。宋占华等[18]提出切割有效率概念,以此作为评价指标综合考虑三区域面积变化与各参数的关系,但优化的参数不够全面。因此,需选取受切割图三区域变化影响显著的变量作为评价指标,保证参数最优化考虑全面且结果可靠。
针对上述问题,本文在对叶菜采收机拟采用的双动刀往复式切割器进行结构设计基础上,基于SolidWorks和Adams软件提出一种动点描边的方法生成割刀切割图,利用图像分析软件Image-Pro Plus识别切割图中相关数据,并提出以漏割距离、重割率作为切割图评价指标进行割刀性能优化,并结合响应面法进行优化设计来进一步提高切割器切割性能,以期为往复式切割器参数优化提供参考。
1 切割机构参数设计
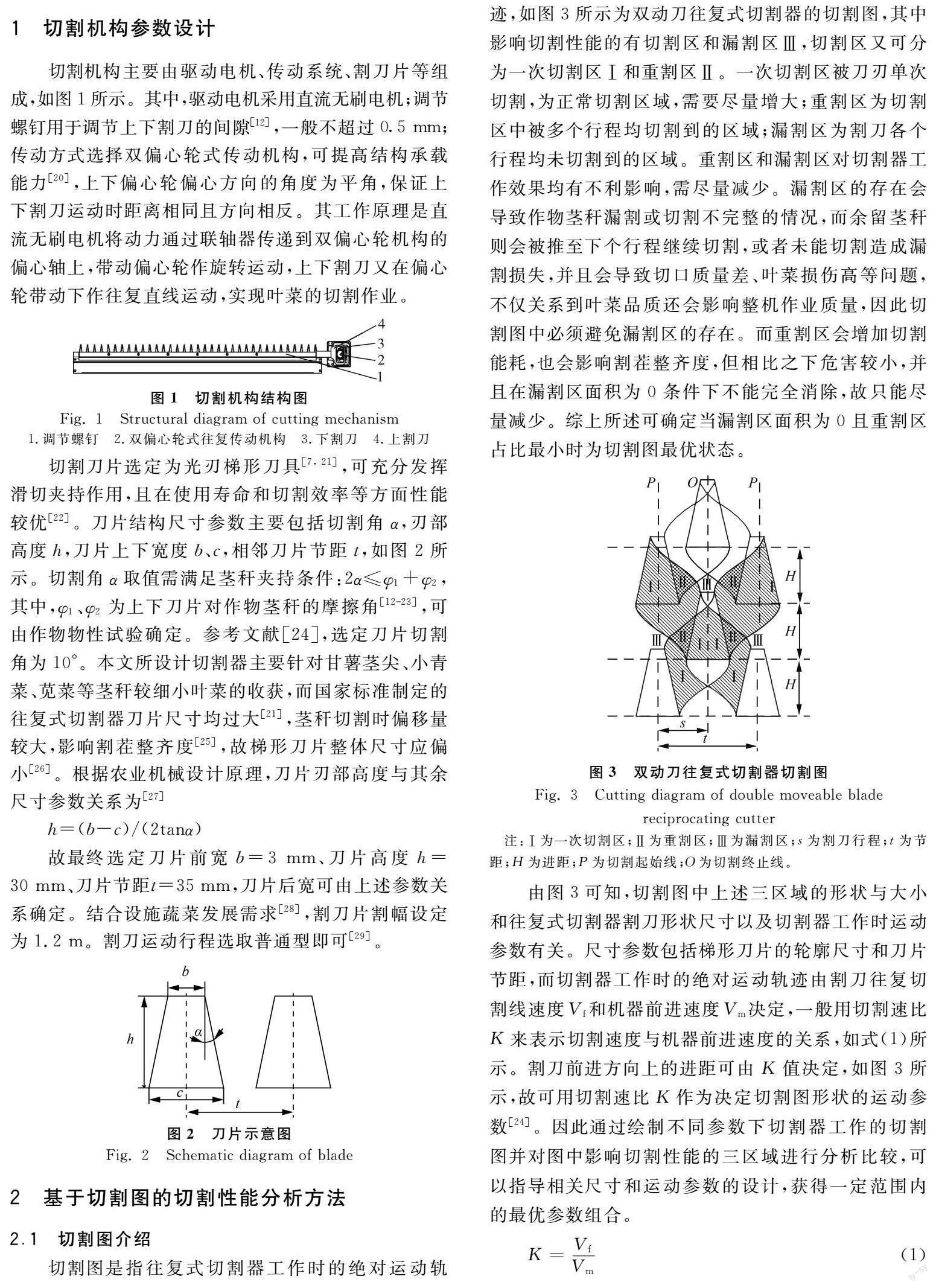
切割机构主要由驱动电机、传动系统、割刀片等组成,如图1所示。其中,驱动电机采用直流无刷电机;调节螺钉用于调节上下割刀的间隙[12],一般不超过0.5 mm;传动方式选择双偏心轮式传动机构,可提高结构承载能力[20],上下偏心轮偏心方向的角度为平角,保证上下割刀运动时距离相同且方向相反。其工作原理是直流无刷电机将动力通过联轴器传递到双偏心轮机构的偏心轴上,带动偏心轮作旋转运动,上下割刀又在偏心轮带动下作往复直线运动,实现叶菜的切割作业。
切割刀片选定为光刃梯形刀具[7, 21],可充分发挥滑切夹持作用,且在使用壽命和切割效率等方面性能较优[22]。刀片结构尺寸参数主要包括切割角α,刃部高度h,刀片上下宽度b、c,相邻刀片节距t,如图2所示。切割角α取值需满足茎秆夹持条件:2α≤φ1+φ2,其中,φ1、φ2为上下刀片对作物茎秆的摩擦角[12-23],可由作物物性试验确定。参考文献[24],选定刀片切割角为10°。本文所设计切割器主要针对甘薯茎尖、小青菜、苋菜等茎秆较细小叶菜的收获,而国家标准制定的往复式切割器刀片尺寸均过大[21],茎秆切割时偏移量较大,影响割茬整齐度[25],故梯形刀片整体尺寸应偏小[26]。根据农业机械设计原理,刀片刃部高度与其余尺寸参数关系为[27]
h=(b-c)/(2tanα)
故最终选定刀片前宽b=3 mm、刀片高度h=30 mm、刀片节距t=35 mm,刀片后宽可由上述参数关系确定。结合设施蔬菜发展需求[28],割刀片割幅设定为1.2 m。割刀运动行程选取普通型即可[29]。
2 基于切割图的切割性能分析方法
2.1 切割图介绍
切割图是指往复式切割器工作时的绝对运动轨迹,如图3所示为双动刀往复式切割器的切割图,其中影响切割性能的有切割区和漏割区Ⅲ,切割区又可分为一次切割区Ⅰ和重割区Ⅱ。一次切割区被刀刃单次切割,为正常切割区域,需要尽量增大;重割区为切割区中被多个行程均切割到的区域;漏割区为割刀各个行程均未切割到的区域。重割区和漏割区对切割器工作效果均有不利影响,需尽量减少。漏割区的存在会导致作物茎秆漏割或切割不完整的情况,而余留茎秆则会被推至下个行程继续切割,或者未能切割造成漏割损失,并且会导致切口质量差、叶菜损伤高等问题,不仅关系到叶菜品质还会影响整机作业质量,因此切割图中必须避免漏割区的存在。而重割区会增加切割能耗,也会影响割茬整齐度,但相比之下危害较小,并且在漏割区面积为0条件下不能完全消除,故只能尽量减少。综上所述可确定当漏割区面积为0且重割区占比最小时为切割图最优状态。
由图3可知,切割图中上述三区域的形状与大小和往复式切割器割刀形状尺寸以及切割器工作时运動参数有关。尺寸参数包括梯形刀片的轮廓尺寸和刀片节距,而切割器工作时的绝对运动轨迹由割刀往复切割线速度Vf和机器前进速度Vm决定,一般用切割速比K来表示切割速度与机器前进速度的关系,如式(1)所示。割刀前进方向上的进距可由K值决定,如图3所示,故可用切割速比K作为决定切割图形状的运动参数[24]。因此通过绘制不同参数下切割器工作的切割图并对图中影响切割性能的三区域进行分析比较,可以指导相关尺寸和运动参数的设计,获得一定范围内的最优参数组合。
2.2 切割图绘制与分析方法
本文基于SolidWorks和Adams软件提出一种动点描边的方法来绘制切割图,只需追踪动点的运动轨迹即可一次性生成完整精确的切割图,既可以保证高精度,而且简单易操作,可极大降低研究周期。首先在SolidWorks中建立双动刀切割机构虚拟模型,再导入到Adams中建立割刀切割过程运动学仿真模型,仿真完成后可在后处理界面导出运动曲线验证仿真是否准确。此时已可获取一组切割刀片各端点运动轨迹,但完整切割图还缺少各行程前后的刀片轮廓,故可添加动点在各行程前后围绕刀片轮廓运动,再追踪动点轨迹即可得到完整切割图。
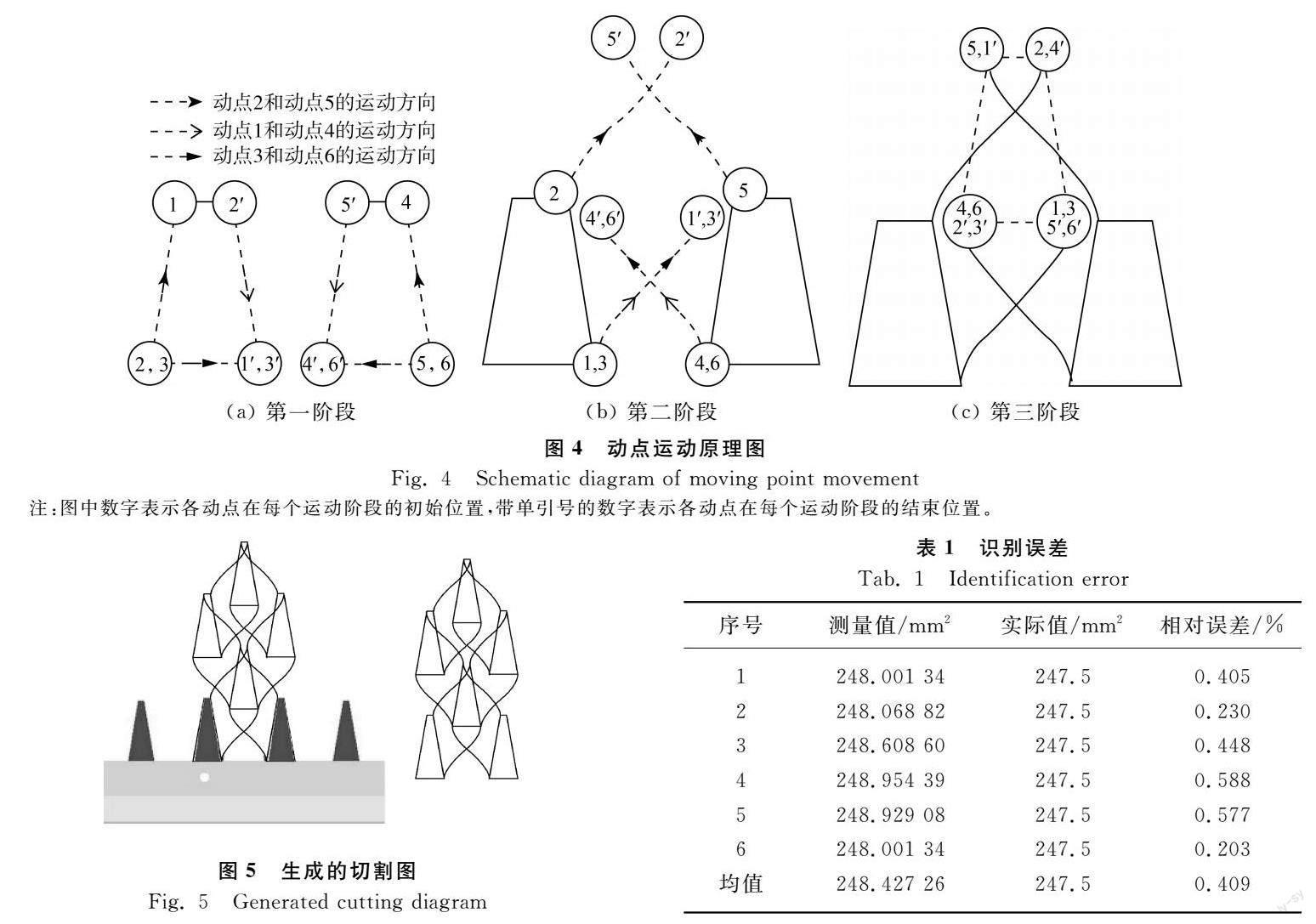
在准确仿真模型基础上选取一组进行切割作业的上下刀片,以刀片梯形轮廓的端点为坐标在每个刀片上添加2或3个半径极小的小球(本文设置为10-7 mm)作为动点,动点驱动约束为一般点驱动约束,以所在刀片为参考进行相对运动。根据图3构成切割图的各曲线分布规律,将割刀运动过程分为7个阶段,使用if函数控制割刀与动点依次在各阶段运动,且不同时运动。第一阶段为动点围绕刀片轮廓运动,此时割刀相对大地参考系静止,结束时动点必须均处于下阶段割刀切割运动的刃线端点,且必须保证每个刃线端点处至少有一个动点;第二阶段为割刀带着动点一起进行切割运动,动点相对割刀静止,完成一个行程的运动后静止;后面几个阶段的运动以此类推,直到第七阶段动点运动结束时仿真停止。图4给出前三个阶段动点绝对运动轨迹,动点相对割刀运动的第一、三、五、七阶段每个动点运动路线均不变,但运动方向必须与前一阶段相反。仿真完成后追踪动点运动轨迹即可生成切割图,如图5所示。
切割图绘制完成后,需分析其中三区域面积大小来评价切割性能,本文使用图像分析软件Image-Pro Plus定量分析各所需数据。该软件通过定标尺操作可自动识别所选对象面积、长度等属性的实际值,操作简单易学,且精度较高,能够满足切割图相关研究的要求。
可通过测量切割图中6个刀片梯形轮廓的面积来衡量每次的识别精度,以切割速度为0.6 m/s、切割速比为0.6的切割图为例,梯形面积测量相对误差如表1所示。
由表1可知,该测量方法所得结果的平均相对误差仅为0.4%左右,故使用Image-Pro Plus软件识别所需数据具有良好的精度,满足切割图分析的要求。
2.3 切割图评价指标的确定
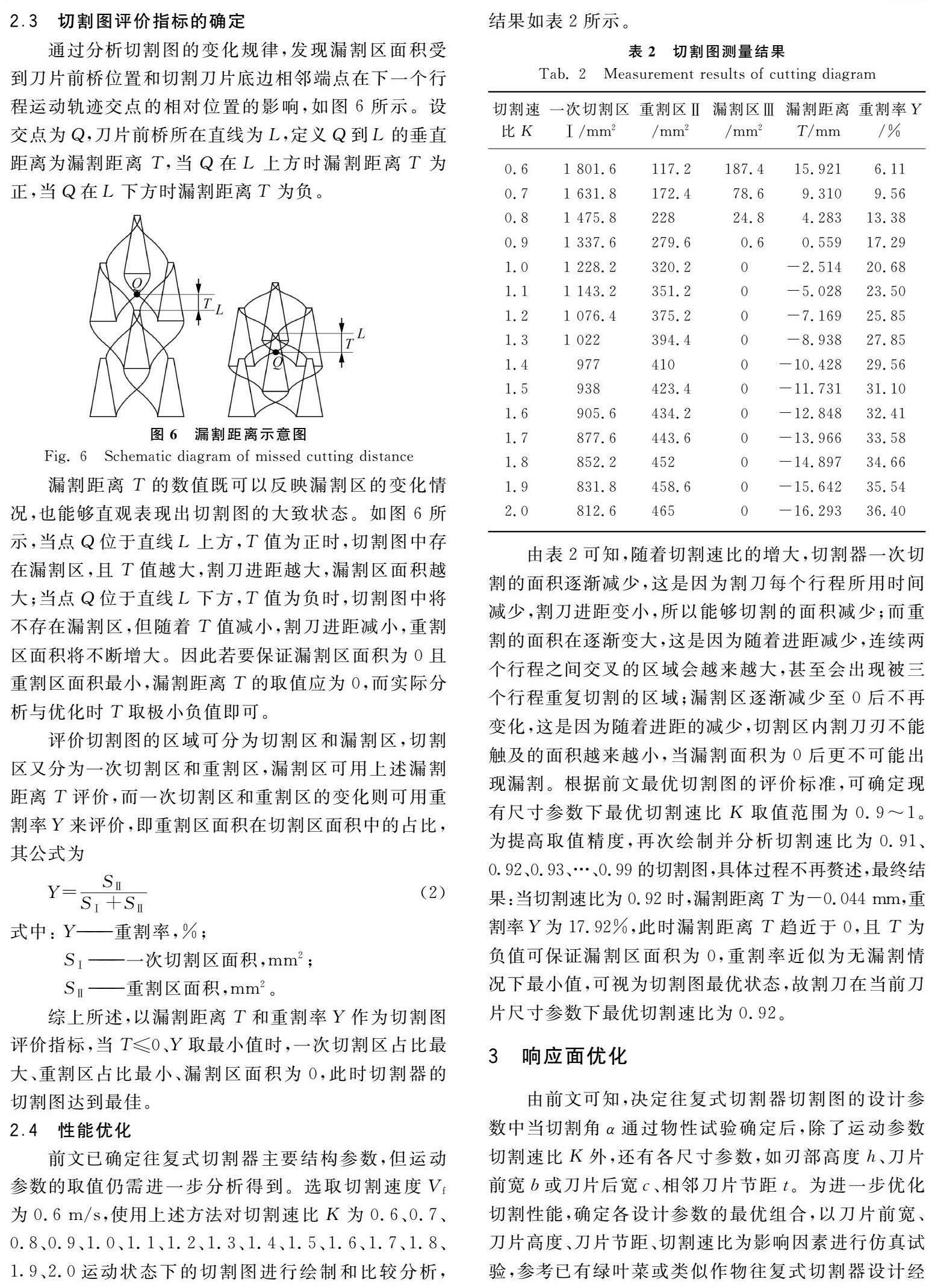
通过分析切割图的变化规律,发现漏割区面积受到刀片前桥位置和切割刀片底边相邻端点在下一个行程运动轨迹交点的相对位置的影响,如图6所示。设交点为Q,刀片前桥所在直线为L,定义Q到L的垂直距离为漏割距离T,当Q在L上方时漏割距离T为正,当Q在L下方时漏割距离T为负。
综上所述,以漏割距离T和重割率Y作为切割图评价指标,当T≤0、Y取最小值时,一次切割区占比最大、重割区占比最小、漏割区面积为0,此时切割器的切割图达到最佳。
2.4 性能优化
前文已确定往复式切割器主要结构参数,但运动参数的取值仍需进一步分析得到。选取切割速度Vf为0.6 m/s,使用上述方法对切割速比K为0.6、0.7、0.8、0.9、1.0、1.1、1.2、1.3、1.4、1.5、1.6、1.7、1.8、1.9、2.0运动状态下的切割图进行绘制和比较分析,结果如表2所示。
由表2可知,随着切割速比的增大,切割器一次切割的面积逐渐减少,这是因为割刀每个行程所用时间减少,割刀进距变小,所以能够切割的面积减少;而重割的面积在逐渐变大,这是因为随着进距减少,连续两个行程之间交叉的区域会越来越大,甚至会出现被三个行程重复切割的区域;漏割区逐渐减少至0后不再变化,这是因为随着进距的减少,切割区内割刀刃不能触及的面积越来越小,当漏割面积为0后更不可能出现漏割。根据前文最优切割图的评价标准,可确定现有尺寸参数下最优切割速比K取值范围为0.9~1。为提高取值精度,再次绘制并分析切割速比为0.91、0.92、0.93、…、0.99的切割图,具体过程不再赘述,最终结果:当切割速比为0.92时,漏割距离T为-0.044 mm,重割率Y为17.92%,此时漏割距离T趋近于0,且T为负值可保证漏割区面积为0,重割率近似为无漏割情况下最小值,可视为切割图最优状态,故割刀在当前刀片尺寸参数下最优切割速比为0.92。
3 响应面优化
由前文可知,决定往复式切割器切割图的设计参数中当切割角α通过物性试验确定后,除了运动参数切割速比K外,还有各尺寸参数,如刃部高度h、刀片前宽b或刀片后宽c、相邻刀片节距t。为进一步优化切割性能,确定各设计参数的最优组合,以刀片前宽、刀片高度、刀片节距、切割速比为影响因素进行仿真试验,参考已有绿叶菜或类似作物往复式切割器设计经验[19, 23-24, 30],刀片前宽范围选定为2~5 mm、刀片高度范围选定为20~40 mm、刀片节距范围选定为30~40 mm,由于切割速比的最优取值会受到其余尺寸参数的交互影响,故对前文最优切割速比的取值范围进行缩放后选定切割速比范围为0.7~1.1,采用Box-Behnken中心组合试验设计理论,以漏割距离和重割率为响应值进行响应面分析,表3为试验因素水平表。
依据前文切割图绘制与分析方法进行四因素三水平仿真试验,响应面试验表及试验结果如表4所示。
3.1 漏割距離分析与检验
3.1.1 漏割距离回归模型建立与显著性检验
使用Design-Expert 12.0软件对漏割距离进行方差分析,结果如表5所示[31]。
方差分析结果表明,各单因素对回归模型的影响均是极显著的,由此可验证以漏割距离作为反映切割图中漏割区变化的评价指标,能够显著且全面地反映决定切割图的各设计要素对切割器性能的影响。回归方程中各项系数的绝对值可用来比较各因素对目标值的影响能力,由式(3)可知,各因素对漏割距离T的影响由大到小依次为:切割速比、刀片节距、刀片高度、刀片前宽。
3.1.2 各因素对漏割距离的响应效应分析
由表5可知,刀片前宽、刀片高度、刀片节距和切割速比对漏割距离T影响均显著,对各显著项与漏割距离T的响应效应进行分析。
由图7可知,漏割距离的值随着刀片前宽的增大而减小,因为刀片前宽增大而其他因素不变时,会导致刀片后宽随之增大,造成切割的上下刀片刃线轨迹距离减小,因此底边相邻两端点的轨迹交点Q位置下降,致使漏割距离的值变小。
漏割距离随着刀片高度的增大而明显减少,这里可分为两种情况,当漏割距离为正时,此时存在漏割区,刀片前桥所在直线L位于交点Q下方,随着刀片高度增大,直线L与交点Q的距离逐渐减少,故漏割距离减小直至为0;当漏割距离为负时,此时已不存在漏割区,直线L位于交点Q上方,随着刀片高度增加,直线L与交点Q的距离会越来越大,故漏割距离的值越来越小。漏割距离随着刀片节距的增大而增大,这是因为当刀片间的距离变大时,切割行程也会变大,而切割速比不变,切割进距会随之变大,这时切割图中交点Q的位置上升,故切割距离会不断增大。漏割距离随着切割速比的增大而减小,因为割刀进距会随之减小,此时切割图交点Q的位置会下降,导致漏割距离值减小。
3.2 重割率分析与检验
3.2.1 重割率回归模型建立与显著性检验
使用Design-Expert 12.0软件对重割率进行方差分析,结果如表6所示。
由表6知,重割率模型的P值小于0.000 1,表明回归模型处于极显著水平,模型决定系数R2=0.982,表示回归模型能反映98.2%的响应值变化。信噪比为28.922 1,大于4,表明模型可用来优化预测。回归模型中A、B、C、D、BD、CD、B2这几项P值<0.01,影响极显著;其余因素P值>0.05,影响不显著。
3.2.2 各因素对重割率的响应效应分析
由表6可知,刀片前宽、刀片高度、刀片节距和切割速比对重割率Y影响均显著,对各显著项与重割率Y的响应效应进行分析。
由图8可知,重割率随着刀片前宽的增加而减小,因为当刀片前宽增加时,在切割角和刀片高度一定条件下,刀片后宽也随之增加,且切割刃线轨迹不变,导致形成重割区的边缘线整体向内缩进,因此重割区面积减小,造成重割率的下降。
由图8可知,重割率随着刀片高度的增加而增大,因为刀片高度增加时,形成重割区的上边缘线虽形状不变但位置上升,在其他边缘线保持不变情况下,重割区面积会随之增加,导致重割率的增大。重割率随着刀片节距的增大而减小,因为刀片间距离变大后,每个行程的切割区将显著增大,而重割区面积变化并不显著,导致重割区在切割区中占比减少,造成重割率的下降。
由图8可知,重割率随着切割速比的增大而增大,因为切割速比增大时,割刀进距将不断减小,每个运动周期中被两个行程切割到的区域不断增大,甚至出现被两个以上的行程均切割的区域,故重割区面积不断增大,而切割区面积又会随着进距减小而减小,因此重割率将不断增大。
3.3 切割机构参数优化
切割器作业时为保证性能应尽量减少漏割和重割的情况,由前文知当漏割距离T等于或小于0时,则不存在漏割区;而重割区在正常设计参数范围内始终存在,只能尽量减少。故当漏割距离T≤0、重割率Y取最小值时切割性能达到最优。设定约束条件为
满足约束条件的最优参数组合为:刀片前宽5 mm、刀片高度为31.653 mm、刀片节距为30 mm、切割速比为0.702。评价指标的预测值为:漏割距离T为0.009 mm,重割率为10.69%。使用上述参数组合建立切割器模型并进行仿真试验,绘制切割图并测量评价指标实际值,得漏割距离T为-0.119 mm,重割率Y为11.6%。比较回归模型对评价指标的预测值和实际结果可知两者绝对误差较小,因此可验证优化模型的可靠性。为便于加工和计算,最终参数组合选定为:刀片前宽为5 mm、刀片高度为32 mm、刀片节距为30 mm、切割速比为0.7,此时漏割距离T为-0.446,重割率Y为11.74%。优化后漏割距离的值趋近于0并为负值,根据前文可知,此时已不存在漏割区并且重割占比在漏割面积为0前提下达到最低,符合切割性能最优的要求。
本文所提出的切割图评价指标漏割距离和重割率可用来衡量三区域变化和进行参数响应面优化,但最终优化效果用一次切割率(一次切割区面积在切割区中占比)、重割率(重割区面积在切割区中占比)、漏割区面积来反映将更加直观,响应面优化结果和优化前最优性能下的三区域对比如表7所示。
由表7可知,优化前后切割器均已不存在漏割区域,但优化后一次切割区在总切割区中占比增加了6.18%,重割区占比则降低了6.18%。结果表明切割器的切割性能有了较大的提升。
4 结论
1) 改进了基于切割图的往复式切割器切割性能分析方法,综合运用SolidWorks和Adams软件建立绘制切割图的运动学仿真模型,在Adams中直接生成不同参数组合下切割器的切割图,再使用Image-Pro Plus软件识别与分析图中相关数据,作为切割图定量评价的依据,操作简单且结果精度高,为参数最优化提供技术支撑。
2) 通过分析切割图中重割区、漏割区对切割性能的影响,确定在漏割区面积为零条件下重割区面积达到最小时为切割器的最佳切割图,并提出以漏割距离和重割率作为评价指标来反映漏割区、一次切割区和重割区的变化,方差分析结果证明这两个评价指标可以显著反映刀片前宽、刀片高度、刀片节距、切割速比对切割性能的影响,可作为参数优化的重要依据。
3) 使用本文改进的切割图绘制与分析方法,对所设计的双动刀往复式切割器运动参数进行优化,优化结果为:当切割速比为0.92时,漏割区面积为0、一次切割率为82.08%、重割率为17.92%。为进一步优化切割器切割性能,确定割刀尺寸参数和运动参数的最优组合,进行四因素三水平响应面仿真试验,试验得到的优化结果为:当刀片前宽为5 mm、刀片高度为32 mm、刀片节距为30 mm、切割速比为0.7时,漏割区面积为0、一次切割率为88.26%、重割率为11.74%,优化后漏割面积仍为0,但一次切割率增加了6.18%,重割率降低了6.18%,切割性能得到较大提升。
参 考 文 献
[1] 金月, 肖宏儒, 肖苏伟, 等. 叶类蔬菜收获技术与装备研究现状及发展趋势[J]. 中国农业科技导报, 2018, 20(9): 72-78.
Jin Yue, Xiao Hongru, Xiao Suwei, et al. Research statue and development tendency on leaf vegetable harvesting technology and equipment [J]. Journal of Agricultural Science and Technology, 2018, 20(9): 72-78.
[2] 许月文, 谢伟, 刘迪, 等. 茎叶类蔬菜收获机的研究现状及发展对策[J]. 农业工程与装备, 2020, 47(1): 20-26.
Xu Yuewen, Xie Wei, Liu Di, et al. Status and development of stem leaf vegetable harvester [J]. Agricultural Engineering and Equipment, 2020, 47(1): 20-26.
[3] Liang Y, Gao G. Design and analysis of automatic vegetable harvesting machine [C]. 2019 2nd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM). IEEE, 2019: 287-290.
[4] Yin H, Wang Z. Research on the design of cutting table mechanism of leafy vegetable harvester based on computer technology [C]. Journal of Physics: Conference Series. IOP Publishing, 2021, 1915(2): 022004.
[5] Song Y, Zou L, Liu X, et al. Design and experimental study of the spinach continuous harvester [C]. International Workshop of Advanced Manufacturing and Automation. Springer, Singapore, 2018: 559-566.
[6] 王伟, 吕晓兰, 王士林, 等. 茎叶类蔬菜机械化收获技术研究现状与发展[J]. 中国农业大学学报, 2021, 26(4): 117-127.
Wang Wei, Lü Xiaolan, Wang Shilin, et al. Current status and development of stem and leaf vegetable mechanized harvesting technology [J]. Journal of China Agricultural University, 2021, 26(4): 117-127.
[7] 吴昆, 宋月鹏. 农作物茎秆切割理论与方法研究进展分析[J]. 农业机械学报, 2022, 53(6): 1-20.
Wu Kun, Song Yuepeng. Research progress analysis of crop stalk cutting theory and method [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(6): 1-20.
[8] 杨树川. 标准往复式切割器的工作性能研究[D]. 咸阳: 西北农林科技大学, 2005.
Yang Shuchuan. Research on the working performance of the standard reciprocating cutterbar[D]. Xianyang: Northwest A & F University, 2005.
[9] 夏萍, 印崧, 陳黎卿, 等. 收获机械往复式切割器切割图的数值模拟与仿真[J]. 农业机械学报, 2007(3): 65-68.
Xia Ping, Yin song, Chen Liqing, et al. Numerical simulation of cutting pattern of a reciprocating cutter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2007(3): 65-68.
[10] 陈翠英, 王新忠, 何增富. 谷物联合收获机油菜收获割台的设计[J]. 农业机械学报, 2003(5): 54-56, 60.
Chen Cuiying, Wang Xinzhong, He Zengfu. Design of header for rape harvesting using grain combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2003(5): 54-56, 60.
[11] Wen J, Fan Y, Hu Y, et al. The optimization of cutter feed rate and flatness of wheat stubbles for combine harvester [C]. In 2019 IEEE 5th International Conference on Mechatronics System and Robots (ICMSR), 2019: 64-69.
[12] 徐秀英, 张维强, 杨和梅, 等. 小型牧草收获机双动切割装置设计与运动分析[J]. 农业工程学报, 2011, 27(7): 156-161.
Xu Xiuying, Zhang Weiqiang, Yang Hemei, et al. Design and kinematic analysis of double-acting cutting device of walk-type pasture reaper [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(7): 156-161.
[13] Su Y, Bao Z, Liu H, et al. Research on motion trajectory and dynamic in reciprocating cutter of maize stalk [C]. 2017 ASABE Annual International Meeting. American Society of Agricultural and Biological Engineers, 2017.
[14] 张家年. 标准型切割器切割图的计算分析[J]. 华中农学院学报, 1982(4): 1-22.
Zhang Jianian. Numerical analysis of cutting graph of standard cutter bar [J]. Journal of Huazhong Agricultural University (Natural Science Edition), 1982(4): 1-22.
[15] 殷晓飞. 往复式切割器切割图的计算机辅助分析[J]. 机械研究与应用, 2011, 24(1): 92-93, 96.
Yin Xiaofei. Computer aided analysis of cutting pattern of a reciprocating cutter[J]. Mechanical Research & Application, 2011, 24(1): 92-93, 96.
[16] 赵匀. 标准型切割器特性曲线和切割图的计算机计算和绘制[J]. 东北农学院学报, 1988, 19(2): 190-197.
Zhao Yun. Computer programs of the cutting Pattern and characteristic curve of standard reciprocating cutter[J]. Journal of Northeast Agricultural University, 1988, 19(2): 190-197.
[17] 向阳, 罗锡文, 曾山, 等. 基于可视化编程的往复式切割器工作特性分析[J]. 农业工程学报, 2015, 31(18): 11-16.
Xiang Yang, Luo Xiwen, Zeng Shan, et al. Operation performance analysis of reciprocating cutter based on visual programming[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(18): 11-16.
[18] 宋占华, 宋华鲁, 闫银发, 等. 棉花秸秆往复式切割器动刀片优化设计[J]. 农业工程学报, 2016, 32(6): 42-49.
Song Zhanhua, Song Hualu, Yan Yinfa, et al. Optimizing design on knife section of reciprocating cutter bars for harvesting cotton stalk [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(6): 42-49.
[19] 杜哲, 胡永光, 王升. 便攜式采茶机切割器运动仿真与试验[J]. 农业机械学报, 2018, 49(S1): 221-226.
Du Zhe, Hu Yongguang, Wang Sheng. Simulation and experiment of reciprocating cutter kinematic of portable tea picking machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 221-226.
[20] 朱玉. 机械设计基础[M]. 北京: 北京大学出版社, 2013.
[21] GB/T 1209.3—2009, 农业机械 切割器 第3部分: 动刀片、定刀片和刀杆[S].
[22] Hou J M, Bai J B, Yao E C, et al. Design and parameter optimization of disc type cutting device for castor stem [J]. IEEE Access, 2020, 8: 191152-191162.
[23] 施印炎, 陈满, 汪小旵, 等. 芦蒿有序收获机切割器动力学仿真与试验[J]. 农业机械学报, 2017, 48(2): 110-116.
Shi Yinyan, Chen Man, Wang Xiaochan, et al. Dynamic simulation and experiments on artemisia selengensis orderly harvester cutter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 110-116.
[24] 沈公威, 王公仆, 胡良龍, 等. 甘薯茎尖收获机研制[J]. 农业工程学报, 2019, 35(19): 46-55.
Shen Gongwei, Wang Gongfu, Hu Lianglong, et al. Development of harvesting mechanism for stem tips of sweet potatoes [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(19): 46-55.
[25] 陈晓峰. 窄节距低割茬往复式切割器的研究[J]. 中国农机化, 2006(2): 68-70.
Chen Xiaofeng. Research on the narrow pitch and lower stubble cutting apparatus[J]. Chinese Agricultural Mechanization, 2006(2): 68-70.
[26] 许勇强. 小型电动叶菜类蔬菜收获机设计[D]. 南京: 南京农业大学, 2017.
Xu Yongqiang. Design of a small electric leaf vegetables harvester[D]. Nanjing: Nanjing Agricultural University, 2017.
[27] 王伟伟. 芹菜收获机的设计与试验研究[D]. 杭州: 浙江理工大学, 2021.
[28] 邹国元, 杨俊刚, 孙焱鑫. 设施蔬菜轻简高效栽培[M]. 北京: 中国农业出版社, 2019.
[29] 刘巍, 黄小毛, 马丽娜, 等. 油葵联合收获机专用割台设计与试验[J]. 农业机械学报, 2020, 51(8): 83-88, 135.
Liu Wei, Huang Xiaomao, Ma Lina, et al. Design and experiment of special header of oil sunflower combine harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(8): 83-88, 135.
[30] 刘东. 鸡毛菜有序收获机关键部件的优化设计与试验研究[D]. 北京: 中国农业科学院, 2019.
Liu Dong. Optimization design and experimental study on key components of orderly harvester of Chinese little greens [D]. Beijing: Chinese Academy of Agricultural Sciences, 2019.
[31] 葛宜元. 试验设计方法与 Design-Expert软件应用[M]. 哈尔滨: 哈尔滨工业大学出版社, 2015.
[32] 康家鑫, 王修善, 谢方平, 等. 大豆联合收获机对称可调式凹板筛设计与试验[J]. 农业工程学报, 2022, 38(2): 11-22.
Kang Jiaxin, Wang Xiushan, Xie Fangping, et al. Design and experiment of symmetrical adjustable concave for soybean combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(2): 11-22.
