基于扰动观测器的机械臂阻抗复合控制研究
2023-06-14张明瑞苗国英姜琛
张明瑞 苗国英 姜琛

摘要针对机械臂系统模型中存在未知扰动的问题,提出了基于扰动观测器的机械臂阻抗复合控制方法.针对二阶阻抗动态模型,采用由扰动观测器(DOB)、阻抗控制器和位置控制器构成的复合控制策略,其中扰动观测器用来估计机械臂模型中的未知扰动,阻抗控制器用于修正输入角度,位置控制器对修正后的角度进行跟踪控制.复合控制保证阻抗误差可以收敛到一个小的邻域,最终实现期望二阶阻抗模型的动态跟踪.仿真算例验证了该控制方法的有效性.
关键词机械臂;阻抗控制;扰动观测器;位置控制
中图分类号
TP273
文献标志码
A
收稿日期
2021-09-27
资助项目
江苏省第五期“333工程”科研项目(BRA2020067);国家自然科学基金(62073169)
作者简介
张明瑞,女,硕士生,研究方向为机械臂控制、抗干扰控制.1019727563@qq.com
苗国英(通信作者),女,博士,副教授,研究方向为多智能体系统的协调控制.mgy@nuist.edu.cn
1 南京信息工程大学自动化学院,南京,210044
0 引言
近年来,机械臂在零件磨削、货物搬运和装配、康复手术等领域有着广泛的应用.當机械臂与开放的外界环境产生直接交互时,需要考虑机械臂的末端环境接触力,因为过大的接触力容易损坏机械臂或给环境带来伤害.因此,机械臂在进行接触作业时,需要具备一定的柔顺性.阻抗控制是重要的柔顺控制方法之一,最早由Hogan[1]提出,他的思想是期望轨迹跟踪误差与人机交互力之间建立弹簧-质块-阻尼动态系统.
阻抗控制的特点是任务规划较少、实现较为简单、具有较好的鲁棒性.因此,国内学者从控制角度出发,设计了多种有效的阻抗控制方法.文献[2]对打磨机器人采用基于位置的自适应阻抗控制方法,可以有效跟踪打磨机器人的末端理想位置,解决了打磨轨迹的补偿修正问题,提高了系统的鲁棒性.对基于阻抗控制的下肢康复机器人,文献[3-4]设置人机交互力矩为约束条件,进行实时控制.文献[5]对机器人末端阻抗模型参数进行在线调整,使机器人适应外界环境,从而实现机器人的柔顺控制.文献[6]利用阻抗控制修正下肢康复机器人的末端运动轨迹,把期望轨迹与修正轨迹的误差滑模化,转换为滑模函数,再进行模糊化后,将自适应力矩作用于下肢康复机器人,使其达到期望的接触力矩.文献[7]将模糊神经网络阻抗控制应用到下肢康复软质外骨骼机器人中,提高了人机交互的柔顺性和协调性.文献[8]提出非奇异终端滑模控制方法对阻抗控制修正的打磨轨迹进行跟踪控制,解决了曲面高精度打磨问题.关于机械臂的跟踪控制问题,现有文献多未考虑外部干扰,但是在机械臂的阻抗控制中,外部扰动的存在会影响阻抗误差的收敛性.
本文在李雅普诺夫函数的基础上提出一种基于扰动观测器的阻抗复合控制器,采用由扰动观测器、阻抗控制器和位置控制器构成的复合控制策略.利用Matlab/Simulink工具,对基于扰动观测器的阻抗复合控制进行仿真,仿真结果验证了所提出算法的有效性.
1 扰动观测器的设计与分析
1.1 机械臂模型
对于N自由度的机械臂,通过拉格朗日动力学方程,建立机械臂关节通用的动力学模型[9]:
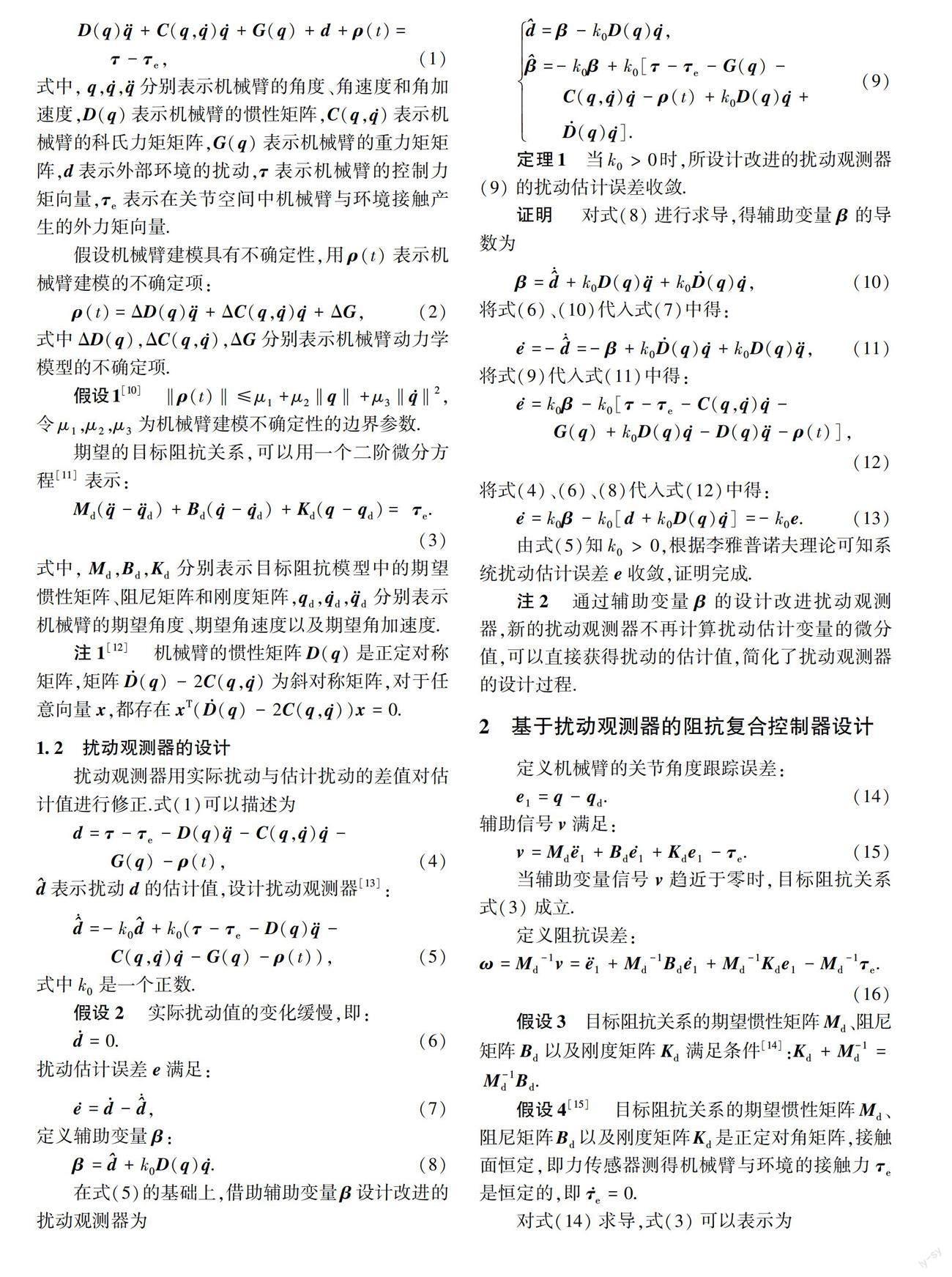
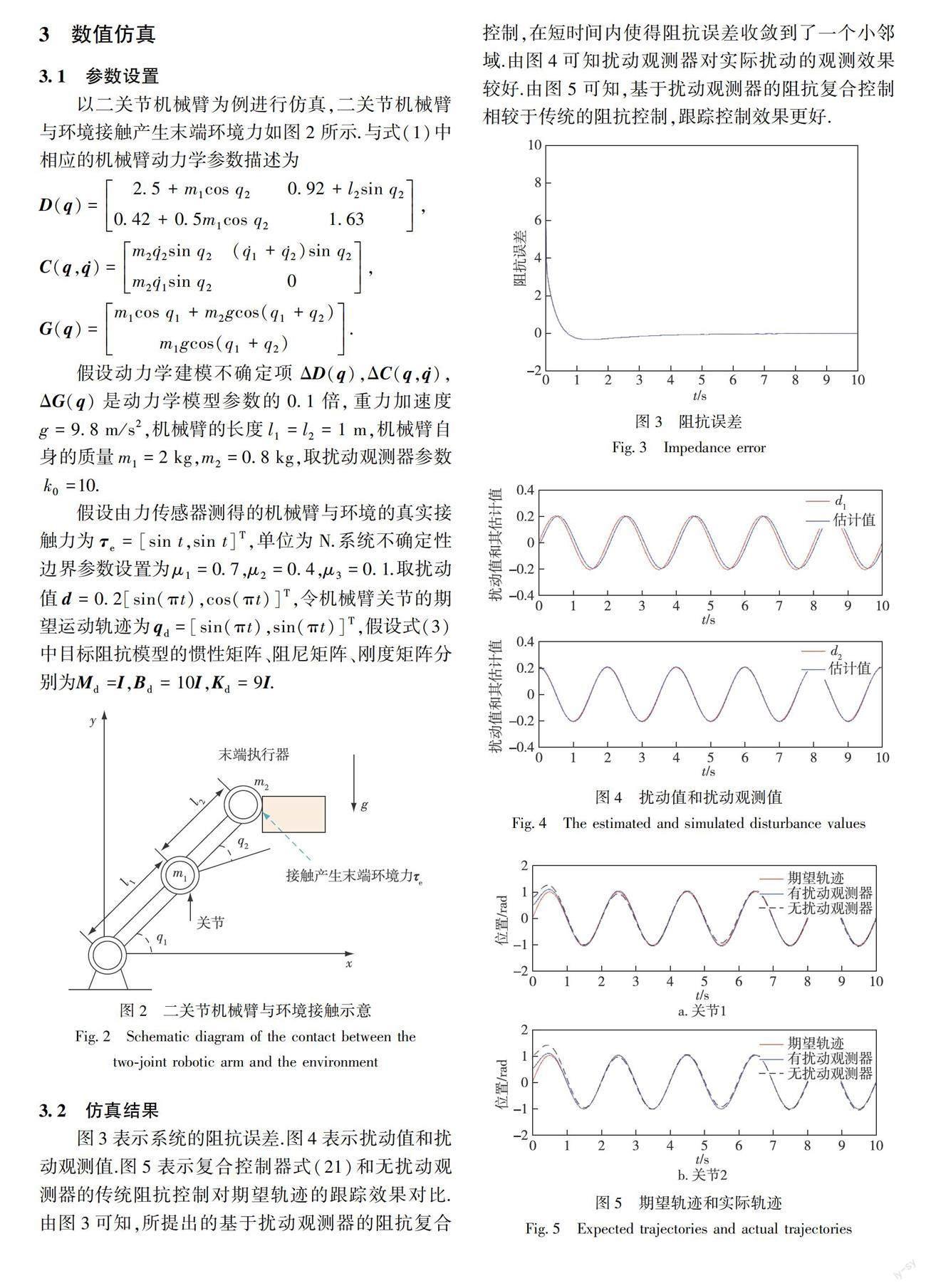
3.2 仿真结果
图3表示系统的阻抗误差.图4表示扰动值和扰动观测值.图5表示复合控制器式(21)和无扰动观测器的传统阻抗控制对期望轨迹的跟踪效果对比.由图3可知,所提出的基于扰动观测器的阻抗复合控制,在短时间内使得阻抗误差收敛到了一个小邻域.由图4可知扰动观测器对实际扰动的观测效果较好.由图5可知,基于扰动观测器的阻抗复合控制相较于传统的阻抗控制,跟踪控制效果更好.
4 结论
本文设计了一种基于扰动观测器的阻抗复合控制器,采用扰动观测器和阻抗控制器、位置控制器组成复合控制器.所提出的基于扰动观测器的阻抗复合控制器,在机械臂与外界环境发生接触的情况下,阻抗误差收敛到一个小邻域,实现了二阶期望阻抗关系,有很好的跟踪控制效果.
参考文献
References
[1] Hogan N.Impedance control:an approach to manipulation.Part I:theory[J].Journal of Dynamic Systems,Measurement,and Control,1985,107(1):1-7
[2] 许家忠,郑学海,周洵.复合材料打磨机器人的主动柔顺控制[J].电机与控制学报,2019,23(12):151-158
XU Jiazhong,ZHENG Xuehai,ZHOU Xun.Active and compliant control of the composite polishing robot[J].Electric Machines and Control,2019,23(12):151-158
[3] 彭二宝,陈昌铎.基于阻抗的下肢康复外骨骼力与位置控制研究[J].南京理工大学学报,2020,44(1):21-25
PENG Erbao,CHEN Changduo.Force and position control for lower limb rehabilitation exoskeleton based on impedance[J].Journal of Nanjing University of Science and Technology,2020,44(1):21-25
[4] 陈靓,黄玉平,陶云飞,等.基于阻抗模型的下肢康复机器人交互控制系统设计[J].计算机测量与控制,2020(4):116-120
CHEN Jing,HUANG Yuping,TAO Yunfei,et al.Design of interactive control system of lower limb rehabilitation robot based on impedance model[J].Computer Measurement & Control,2020(4):116-120
[5] 张刚,布挺,焦文潭,等.柔性机器人动力学跟踪变阻抗控制[J].实验室研究与探索,2020,39(3):15-19
ZHANG Gang,BU Ting,JIAO Wentan,et al.Variable admittance control for flexible robot motion trajectory tracking[J].Research and Exploration in Laboratory,2020,39(3):15-19
[6] 于振中,谷华航.下肢康复机器人模糊增益自适应调整的滑模阻抗控制[J].制造业自动化,2020,42(7):46-50
YU Zhenzhong,GU Huahang.Trajectory tracking control of lower limb rehabilitation robot based on iterative learning with advanced sampling time[J].Manufacturing Automation,2020,42(7):46-50
[7] 张玉明,吴青聪,陈柏,等.下肢软质康复外骨骼机器人的模糊神经网络阻抗控制[J].机器人,2020,42(4):477-484,493
ZHANG Yuming,WU Qingcong,CHEN Bai,et al.Fuzzy neural network impedance control of soft lower limb rehabilitation exoskeleton robot[J].Robot,2020,42(4):477-484,493
[8] 贾林,王耀南,何静,等.自由曲面打磨机器人非奇异终端滑模阻抗控制[J].电子测量与仪器学报,2020,34(5):89-96
JIA Lin,WANG Yaonan,HE Jing,et al.Non-singular terminal sliding mode impedance control of free-form surface grinding robot[J].Journal of Electronic Measurement and Instrumentation,2020,34(5):89-96
[9] Peng J Z,Yang Z Q,Ma T L.Position/force tracking impedance control for robotic systems with uncertainties based on adaptive Jacobian and neural network[J].Complexity,2019(1):1-16
[10] Feng Y,Yu X H,Man Z H.Non-singular terminal sliding mode control of rigid manipulators[J].Automatica,2002,38(12):2159-2167
[11] Jung S,Hsia T C.Neural network impedance force control of robot manipulator[J].IEEE Transactions on Industrial Electronics,1998,45(3):451-461
[12] Ge S S,Wang C.Adaptive neural control of uncertain MIMO nonlinear systems[J].IEEE Transactions on Neural Networks,2004,15(3):674-692
[13] Chen W H,Ballance D J,Gawthrop P J,et al.A nonlinear disturbance observer for robotic manipulators[J].IEEE Transactions on Industrial Electronics,2000,47(4):932-938
[14] 于欣波.機器人自适应神经网络阻抗控制与人机物理交互研究[D].北京:北京科技大学,2020
YU Xinbo.Research on robot adaptive neural network impedance control and human-machine physical interaction [D].Beijing:University of Science and Technology Beijing,2020
[15] 丁润泽.基于阻抗控制的机器人力控制技术研究[D].哈尔滨:哈尔滨工业大学,2018
DING Runze.Research on robot force control based on impedance control[D].Harbin:Harbin Institute of Technology,2018
[16] 秦悦欣.五杆并联机器人的自适应阻抗控制方法研究[D].镇江:江苏大学,2019
QIN Yuexin.Research on adaptive impedance control methods for five-bar parallel robot[D].Zhenjiang:Jiangsu University,2019
Impedance composite control for manipulator
based on disturbance observer
ZHANG Mingrui1 MIAO Guoying1 JIANG Chen1
1School of Automation,Nanjing University of Information Science & Technology,Nanjing 210044
Abstract In this paper,an impedance composite control method based on disturbance observer is proposed for manipulator system with unknown disturbances.For tracking the second order impedance dynamic model,a composite control strategy is designed,which includes the disturbance observer (DOB),the impedance controller,and the position controller to estimate unknown disturbances,correct input angle,and track the adjusted angle,respectively.This composite control strategy ensures that the impedance error converges to a small neighborhood,thus realizes the desired dynamic tracking of the second order impedance model.The effectiveness of the proposed control method is proved by simulation examples.
Key words manipulator;impedance control;disturbance observer (DOB);position control
