基于无人机平台的垃圾搜索及拾取系统设计
2017-03-15于海魁于国龙虎良仙王大路
于海魁+于国龙+虎良仙+王大路
摘 要:文中提出基于无人机平台的垃圾搜索及拾取设计方案,此方案采用遥控直升机作为载体,通过对遥控直升机的设计和改造,可平稳的飞行并进行垃圾搜索和拾取。机械臂的设计和安装位置满足轻松抓取、释放要求且不影响机身重量。应用NOR Flash、TMS320DM6443处理器等硬件作为系统硬件设计中的一部分,有效解决了搜索视频在传输中的低效率和数据丢失问题。相比于其他搜索及拾取系統,该设计方案更为灵活,实用价值更高。
关键词:系统硬件设计;机械臂;垃圾搜索及拾取;视频帧
中图分类号:TP277;TP393 文献标识码:A 文章编号:2095-1302(2017)02-00-02
0 引 言
近年来,无人直升机在军事、工业、电影拍摄、农业等领域有着广泛应用,无人直升机技术受到广大高校、研究所的广泛关注。遥控直升机被当作实验平台用以研究无人机的追踪、路径规划、目标识别等一系列问题[1]。由于各类景区垃圾的大量存在,尤其是悬崖及湖面高危地带的垃圾人工清洁难以完成,使得环境清洁问题成为重大的社会问题,为保证清洁工作业的安全性、可靠性,降低风险和避免生命财产的损失,并大大提高工作效率、降低成本,因此遥控直升机安装垃圾搜索系统就显得十分必要。本系统以遥控直升机作为实验平台将机械臂与遥控飞机有机结合,用其来研究垃圾搜索及拾取技术,代替清洁工去做攀爬、下湖等繁琐且危险的工作,使得基于无人机平台的垃圾搜索及拾取系统具有广阔的市场前景和重大的社会意义。实验表明,要保证遥控直升机准确的拾取垃圾,需要时刻探测目标垃圾的位置和控制遥控直升机的速度,将信息发送到遥控直升机搜索系统,实时对遥控直升机进行姿态、速度的调整。
1 系统的主要功能模块设计及实现
本论文阐述以遥控直升机做载体,以手机或遥控器为控制终端[2],控制智能机械臂抓取正常情况下人不便于直接拾取到的垃圾。搜索模块遥控直升机垃圾搜索及拾取系统,主要适用于公园、景区等公共场所及抓取具有很强危险性的悬崖上的垃圾与深水区水面上的垃圾,也可以用于短途传送物品,例如将2千克以下的物品从一楼运送至高层等。
1.1 系统的功能结构
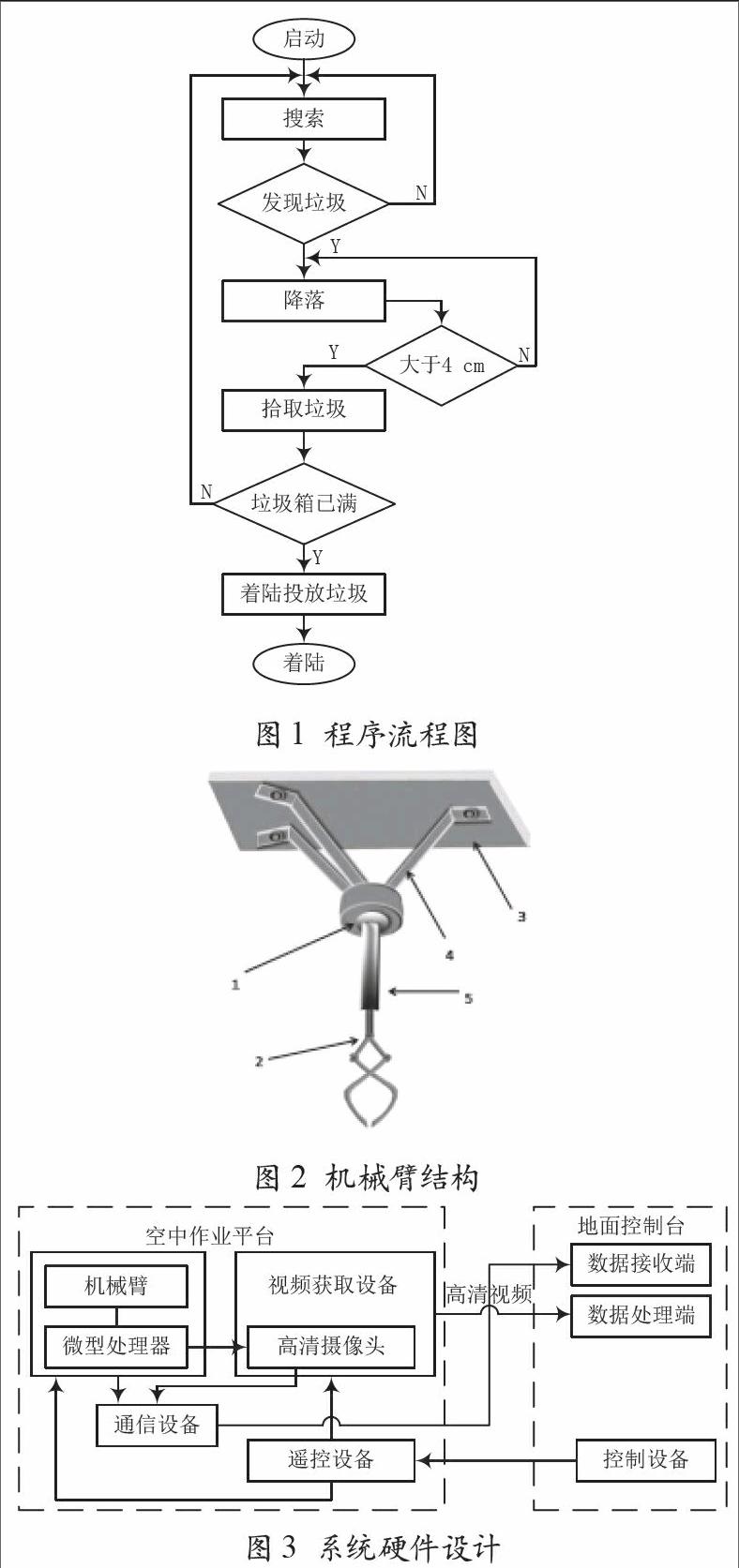
根据垃圾搜索及拾取系统功能所需将该系统划分为四个功能模块[3],分别为搜索模块、拾取模块、飞行控制模块、机械装置模块。本文主要介绍机械装置,因为机械装置的设计方法对遥控直升机的抓取和释放起着决定性作用。由于遥控直升机的机底与机械臂相连,因此遥控直升机的协调性和重量成为最主要的控制对象。其中,重量控制是提升经济性能最有效的办法,机械臂的重量过大必定导致遥控直升机的重量过大,从而增加了耗电量甚至影响了飞行高度而导致机身损坏。因此抓臂的材料应选择质地较轻的塑料棒或是空心管,使遥控直升机所承受的重量尽可能小,将经济性能调制到最佳。其次考虑协调性,抓臂的安装位置也很重要,安装上机械臂后要保证直升机飞行平稳、协调。根据结构特点和重心分析,机械臂应处于直升机底部的重心部位且垂直于机身。为保证直升机安全飞行,机械臂应该为收缩结构或是折叠结构。程序流程图如图1所示。
1.2 垃圾搜索视频传输系统设计
垃圾搜索视频传输系统基于无线视频传输系统[4],利用地面控制系统和空中控制系统进行自动拍摄及获取影像。为保证遥控飞机的平衡和搜索结果的准确性,数码相机主要分布在机头和机底尾部两个最佳观测部位,遥控飞机在搜索过程中应保持匀速飞行,为减少飞机在飞行过程中造成的镜头抖动,运用减振设备使得拍摄镜头稳定、拍摄图片清晰。垃圾搜索源选择高分辨率的测距自动定焦相机,在飞行阶段相机与搜索目标做相对运动,当摄像头观测区域到达目标所在区域时,每隔0.01 s摄像头便自动定焦于搜索目标上,当搜索目标与摄像头相对静止时则做单次定焦,大大提高了视频的清晰度。同时利用无线网传输技术将摄像头所拍摄的视频分解成图片以数据报的形式传回地面控制台,达到实时视频的作用[5]。
1.3 垃圾抓取机械臂设计
由于该遥控直升机体积小,荷载量低,选择有利于垃圾抓取和释放的结构组成是为结构设计打下良好的基础[6]。旋转轴可各方位360°旋转,是抓取垃圾的重要组成部分,其半径为4 cm,主要由机械手、收缩杆与固定板组成。
(1)机械手:可拆卸,针对不同类型的垃圾可实现灵活抓取,提高系统的普适性。
(2)固定板:与遥控飞机底部相连且能够保证飞机飞行平衡,共有三个连接点,根据三角形具有稳定性的原理,三个点构成一个等边三角形。
(3)收缩杆:为保证方便灵活的在狭小、复杂的区域实现抓取功能并减轻机身重量,将为收缩杆添加2~3节空心杆。
机械臂结构如图2所示。
1.4 系统主要硬件设计
该系统采用为特定应用设计的嵌入式系统[7]来设计。数字信号处理选用高效可靠的DSP芯片,可大大提高图像处理、通信技术等领域的性能。从性能上看,系统由视频获取模块、视频数据编码模块、数据存储模块、外部设备及电源模块组成,系统硬件设计如图3所示。储存模块采用传输效率较高的NOR Flash、USB接口移动硬盘。在效率方面,NOR Flash不需要外部接口,在没有软件支持的情况下可直接运行代码,快速存储每个字节。为方便存储,可用USB3.0接口的大容量移动存储设备。为提高视频的传输速度和准确性,可以在视频获取模块建立缓冲区,将分割成图像的视频帧按时间存入缓冲区,采用多路同步传输的方式快速传到视频解码模块[8]。解码模块由TMS320DM6443处理器和相应的外部设备构成,同时还带有VICP协处理器。该模块完成了将视频帧解码为原始图像并通过地址将图像还原为拍摄视频[9],有效避免了数据丢失。
2 结 语
本文首先对垃圾搜索及拾取系统的前景和意义做了简要分析,其次详细介绍了该系统功能模块及各模块的设计。通过对机械臂的合理设计及对摄像装置的整体布局使得遥控直升机在飞行上得到了极好的控制,使拾取功能得以实现。在系统硬件设计上选用TMS320DM6443视频处理器解决了解码效率低的问题,应用NOR Flash可快速写入和擦除,对视频传输的实时性有着重要意义。
参考文献
[1]马建仓,罗亚军,赵玉亭.蓝牙核心技术及应用[M].北京:科学出版社,2003:2-176.
[2]陈在平,孙逊,贾超.POWERLINK物理层通信的实现[J].计算机工程与设计,2015(6):1420-1424.
[3]钟玉琢,王琪,贺玉文.基于对象的多媒体数据压缩编码国际标准—MPEG-4 及其校验模型[M]. 北京:科学出版社,2000:2-53.
[4]杨新锋,田广强,路新华.基于智能视觉分析无人机发动机转速测量方法[J].计算机仿真,2015,32(9):72-74.
[5]晏磊,吕书强,赵红颖,等.无人机航空遥感系统关键技术研究[J].武汉大学学报(工学版),2004,37(6):67-70.
[6]黎启柏,肖长周.水面垃圾打捞机械手及其液压驱动系统[J].华南理工大学学报(自然科学版),1996,24(2).
[7]贾秀杰.多功能全自动抓取器的应用[J].新技术新工艺,1999 (4):18.
[8]邸兴,张杰.高速摄像机远程同步触发系统[J].电子设计工程,2015,23(4):176-178.
[9]王华,柴乔林,赵晋.基于IPv6的嵌入式系统设计与应用[J].计算机工程与设计,2007,28(1):130-131.
