动态事件触发机制下多智能体系统固定时间跟踪
2023-05-31于镝王亚洁赵博刘琼
于镝, 王亚洁, 赵博, 刘琼
(1.北京信息科技大学 自动化学院, 北京 100192; 2.北京师范大学 系统科学学院, 北京 100875)
0 引言
作为控制领域的前沿热点问题,多智能体协同控制是指多个具有感知、通信和移动能力的智能体之间通过局部信息交互,实现所期望的整体组织行为,例如一致性控制[1]、跟踪控制[2]和合围控制[3]等,并且在无人机侦察救援、机器人协作搬运、智慧交通调度、微电网功率优化等领域都有着广泛应用。
收敛速度是多智能体协同控制中重点关注的内容。有限时间协同控制[4-5]是指多智能体系统能够在有限时间内达到控制目标,该方法具有收敛速率快、鲁棒性强、控制精度高等优点。但是收敛时间上界与系统初始值相关,当系统初始值未知或非常大时,收敛时间会趋于无穷甚至无法计算。实际应用中某些多智能体系统需要在特定的时间内实现协同,如航天器姿态同步、无人艇编队、机器人搜救等,并且在系统初始状态未知情况下便可以对收敛时间进行预测,这将对控制器的设计大有裨益。因此,固定时间稳定[6]的概念应运而生,其克服了有限时间控制中系统收敛时间对初始状态的依赖,可以根据实际应用需求进行系统固定时间控制器设计。当前,在多智能体系统固定时间协同控制领域已涌现出许多优秀成果[7-16]。采用牵制控制方法,文献[7]考虑了系统有/无非线性项两种情况,实现了含有外部扰动的1阶多智能体系统固定时间的群组一致性。文献[8]针对1阶受扰非线性系统,设计了包含符号函数项的控制协议,实现了固定时间跟踪一致性。采用非光滑分析方法和切换控制思想,文献[9]在具有有向生成树的网络拓扑结构下,解决1阶受扰多智能体系统的固定时间协同跟踪问题。值得指出的是,上述成果均解决1阶受扰多智能体网络协同控制问题。由于同时考虑智能体动态的位置信息和速度信息,2阶多智能体网络相较1阶多智能体网络的控制协议设计更加复杂,并且网络动态分析更加细致。因此,一些研究人员针对2阶受扰多智能体系统的固定时间协同控制问题展开了研究。文献[10]提出新型非奇异终端滑模控制协议,实现了多智能体系统固定时间合围控制。采用固定时间观测器和非奇异滑模面结合的方法,文献[11]设计固定时间滑模跟踪控制器,实现了多航天器系统的姿态协同。文献[12]在细致均衡的有向图下,采用齐次理论与积分滑模相结合的方法实现了多智能体系统一致性及跟踪控制。基于自适应扰动状态观测器和反步法,文献[13]实现了固定时间有界群集编队控制,并进行了仿真验证。文献[14]设计集成控制协议,解决了受扰2阶多智能体系统的固定时间一致性问题;标称控制部分确保在积分滑模面上的固定时间收敛,不连续积分滑模控制或连续超扭控制部分用于补偿干扰且固定时间收敛。文献[15]设计固定时间跟踪控制律,且基于系统状态的相关信息更新控制参数,实现了系统平滑跟踪控制。在无速度信息的情况下,文献[16]设计固定时间观测器精确估计状态信息,实现了固定时间一致性问题。
然而,上述文献所提出的控制器均需采用周期性采样信号进行控制,会造成大量系统通信计算资源的浪费。为解决该问题,诸多学者引入了事件触发机制[17],当预先设定的触发函数满足一定条件时,智能体之间才进行通信及控制协议的更新,在一定程度上减少了系统通信和计算资源的损耗。根据触发函数的不同,事件触发机制可分为静态事件触发[18-23]和动态事件触发[24-27]两类。其中静态事件触发分为基于固定阈值的事件触发函数[18-19]以及基于系统相对状态的事件触发函数[20-23]。通过引入内部动态变量,动态事件触发机制[24-27]使得事件触发函数阈值随着测量误差而自适应地变化,从而避免了静态事件触发机制中因无视测量误差大小而导致事件触发函数阈值固定或变化规律一成不变的情况,增强了事件触发机制的自适应性。结合动态事件触发机制,文献[24]设计了线性多智能体系统的分布式编队控制协议,并将其应用到多机器人编队控制中。文献[25]将滑模控制算法与动态事件触发机制相结合,实现了1阶受扰多智能体系统的有限时间一致性控制。文献[26]在动态事件触发机制控制下,实现了1阶时延系统的固定时间跟踪控制。针对切换拓扑情况,文献[27]设计动态事件触发控制协议,解决了受扰非线性多智能体系统实际固定时间一致性问题。
受上述文献的启发,本文将针对2阶受扰非线性多智能体系统,研究其在有向拓扑下固定时间跟踪控制问题,通过引入动态事件触发机制,提出一种新型积分滑模固定时间控制方案。本文的主要贡献与创新点总结如下:
1)不同于文献[7-9,26,27]中控制对象为1阶受扰多智能体系统,本文研究2阶受扰非线性多智能体系统,且通过设计一个新型积分滑模面消除扰动对多智能体系统动态的影响,提高了系统鲁棒性。
2)不同于文献[18-21]中采用的静态触发机制,本文通过引入与测量误差相关的动态变量,设计能够实现固定时间跟踪控制的动态事件触发函数,使得动态事件触发函数阈值自适应地随着测量误差变化,从而增强事件触发机制的自适应性且降低触发频率,进一步节省通信和计算资源。
3)相较于文献[4-5,25]中的有限时间控制,本文所提出的控制协议能在固定时间内实现系统跟踪控制,可以根据控制器参数来估计收敛时间,从而放宽了有限时间控制中收敛时间依赖于系统初始状态的限制。
符号说明:本文中,‖·‖表示向量或矩阵的2-范数,1n表示n维全1列向量。对于矩阵A∈Rn×n,其最大特征值和最小特征值分别用λmax(A)和λmin(A)表示。函数矢量sigα(x)=[sigα(x1),…,sigα(xn)]T,幂次函数sigα(xi)=|xi|αsgn(xi),其中x∈Rn且x=[x1,…,xn]T,α>0,符号函数矢量sgn(x)=[sgn(x1),…,sgn(xn)]T。对角阵diag(|x|α)={|x1|α,…,|xn|α}。
1 基础知识与问题描述
1.1 图论
本文考虑由1个领导者和N个跟随者所组成的多智能体系统,将领导者标记为智能体0,并假设跟随者只接收领导者发送的信息,而领导者不接收任何信息。定义矢量B=(b1,b2,…,bN)T,如果智能体i能接收到来自领导者的信息则bi>0,否则bi=0。拓扑图对应的拉普拉斯矩阵为
式中:H=[hij]∈RN×N。
1.2 基本引理
假设原点是下列非线性系统的平衡点
(1)
式中:x(t)∈Rn为系统状态;f(t,x(t)):R+×Rn→Rn是未知非线性函数;x0为系统初始状态。
定义1[6]若式(1)所描述的系统全局渐近稳定且存在一个稳定时间T(x0)>0,使得系统的任意解能够在T(x0)内收敛到平衡点,则称系统(式(1))的原点是全局有限时间稳定的。在此基础上,若存在稳定时间T≤Tmax,其中Tmax为与系统初始状态无关的稳定时间上界,则称系统(式(1))的原点是全局固定时间稳定的。
引理1[6]考虑系统(式(1)),若存在一个李雅普诺夫函数V(x)>0,并有a>0,b>0,0<α<1,β>1且满足
(2)
则称该系统能实现固定时间稳定。此外,稳定时间T满足如下条件
(3)
引理2[27]令z1,z2,…,zi,…,zN≥0,有
1.3 问题描述
在本文考虑的多智能体系统中,第i个跟随者和领导者的动力学方程分别描述如下:
(4)
(5)
假设1图包含有向生成树,其中领导者为根节点。
假设2对于非线性函数h(·),存在一个正常数ρ,使得对于任意xi∈Rn,xj∈Rn,vi∈Rn,vj∈Rn,t≥0,有
‖h(xi,vi,t)-h(xj,vj,t)‖≤ρ(‖xi-xj‖+‖vi-vj‖)
(6)
假设2给出了矢量域上的QUAD条件[28],且所有的线性、分段线性连续函数和具有一致有界偏导数∂f/∂xi,i=1,2,…,N的非线性函数,均满足该条件。诸多众所周知的实际应用系统[29],如谐振子、微分驱动轮式机器人、拉格朗日型飞行器和机械手等,均满足该Lipschitz类型条件。

本文的主要控制目的是针对2阶受扰多智能体系统,结合积分滑模控制方法和动态事件触发机制,设计一个切实可行的控制协议,使得跟随者的状态在固定时间内跟踪上领导者的状态,即实现固定时间跟踪控制,不受扰动影响且有效节省通信资源。
2 主要结果

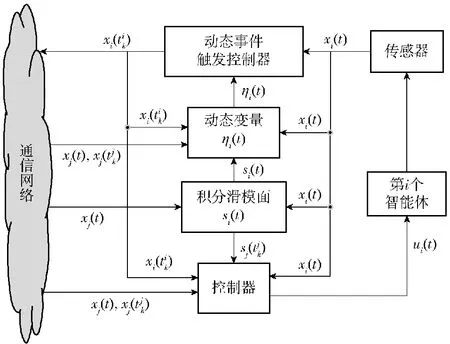
图1 控制方案示意图Fig.1 Diagram of control scheme
2.1 固定时间跟踪控制协议设计
为了克服扰动的影响并提高系统鲁棒性,本文采用积分滑模控制方法。同时为了节约系统通信和计算资源,引入动态事件触发机制,设计固定时间控制协议,实现多智能体系统跟踪。
首先定义智能体跟踪误差为
(7)
定义积分滑模变量为

(8)
基于上述滑模面,设计事件触发控制协议如下:
(9)

定义测量误差如下:

(10)
式中:sj为滑模变量。则ui(t)可用测量误差表示如下:
k5sj(t)-k6(‖φx(t)‖+‖φv(t)‖)1n)
(11)
式(11)写成向量形式为
u(t)=E(t)+(H⊗In)-1(-k1φ(t)-sigαφ(t)-sigβφ(t)-k2sgn(s(t))-k3sigα(s(t))-k4sigβ(s(t))-k5s(t)-k6(‖φx(t)‖+‖φv(t)‖)1Nn)
(12)

下面设计一个新型的动态事件触发函数来保证系统在固定时间内实现跟踪控制。受文献[25]的启发,动态事件触发函数和内部动态变量分别设计为
gi(t)=‖Ei(t)‖2-k3‖si(t)‖α+1-k4‖si(t)‖β+1
(13)

(14)
式中:l1、l2>0;ηi(0)为动态变量初始值,ηi(0)>0。则当动态事件触发函数和内部动态变量满足
(15)

不同于文献[18-19]中设计的包含不连续部分sgn(·)和连续部分sigα(·)的积分滑模面,本文设计只包含连续部分sigα(·)的积分滑模面,使得整个收敛过程更趋于平滑;同时,不同于文献[18-19]实现1阶受扰多智能体系统的固定时间协同控制,本文解决2阶受扰多智能体系统的固定时间跟踪控制问题,被控对象不同,更符合工程实践需求。
文献[14]和文献[25]均基于网络误差的幂次函数(·)α设计积分滑模面。文献[14]解决受扰2阶多智能体系统固定时间协同跟踪问题,但未考虑未知非线性动态对跟随者运动性能的影响;且所设计的周期性采样信号控制的固定时间控制器导致通信和计算资源浪费。文献[25]实现了有限时间协同控制但不利于满足应用需求。而本文设计的积分滑模面适用于符合实际应用的固定时间协同控制情况,具有更强的实用性。
在动态触发机制式(13)~式(15)中,若l1=l2=0,则对应静态触发机制,即如

(16)
此时,由于k3和k4均为固定的正常数,当多智能体系统趋近协同跟踪时,静态事件触发机制会导致不必要信息的频繁传输而浪费大量网络通信和计算资源。
相较于文献[25]中采用动态触发机制下的积分滑模控制方案解决有限时间1阶受扰多智能体系统协同一致问题,本文所提出的动态触发机制下的新型积分滑模控制方案解决了2阶受扰多智能体系统固定时间协同跟踪问题,避免了收敛时间对系统状态初始值的依赖而直接可通过控制参数进行设计,更贴合实际应用需求。同时,通过对智能体状态和速度的动态分析,可以得到更加细致的动态协同过程,便于实际系统应用。
2.2 稳定性分析
本节证明采用本文所提出的控制协议及触发函数可以实现系统的固定时间跟踪。
定理1考虑由式(4)和式(5)所描述的多智能体系统,当满足假设1和假设2时,控制协议(见式(9))和动态事件触发条件(见式(15))作用下,若满足如下参数条件

则多智能体系统能够在固定时间内实现跟踪控制,且稳定时间满足
(17)
式中:c>0。

(18)
式中:In为n×n维单位矩阵;1N为n维列向量。
根据假设2,可得


基于柯西不等式,可得
sT(H⊗In)d-sTk2sgn (s)≤-(k2-ω‖H‖)‖s‖
基于杨氏不等式,可得

(19)
式中:λmax(HHT)为矩阵HHT的最大特征值。


(20)
因此滑模变量可以在固定时间T1内到达滑模面。

(21)
式中:λmin为矩阵的最小特征值;INn为Nn×Nn维单位矩阵。因此式(21)可写为
式中:
根据引理1得到稳定时间T2为
(22)
由此可知根据多智能体系统可以在T≤T1+T2内实现固定时间跟踪控制。证毕。
综上,相比于文献[22]、文献[23]的无向拓扑及文献[12]中的有向拓扑且需要细致均衡条件,本文所考虑的拓扑关系为有向拓扑,且只需有以领导者为根节点的有向生成树,限制条件少,应用更广泛。
2.3 排除Zeno现象
下面分析采用所提出的动态触发机制,系统不存在Zeno现象。

定理2考虑由式(4)和式(5)所描述的多智能体系统,如果动态事件触发条件(见式(15))以及定理1的条件成立,则可以避免Zeno现象。

(23)

又因为
令Λ1=(ε1a+k6)(Najmax‖vj-vi‖+bj‖vj-v0‖),Λ2=(ε1b+ε2+k6)[ajmax(‖uj-ui‖+ω+ρ‖xj-xi‖+ρ‖vj-vi‖)+bj(‖uj‖+ω+ρ‖xj-x0‖+ρ‖vj-v0‖)],Λ3=ε2ε3,Λ4=k6λmax(H⊗In)(‖e2‖+ρ(‖e1‖+‖e2‖)+ω+‖u‖),可知Λ1、Λ2、Λ3、Λ4均为正数。则式(23)可写为

则

同理可得
(24)
(25)
因此最小事件触发间隔严格大于零,不存在Zeno现象。证毕。
3 仿真验证
考虑由1个领导者和5个跟随者组成的多智能体系统,其有向通信拓扑关系如图2所示。
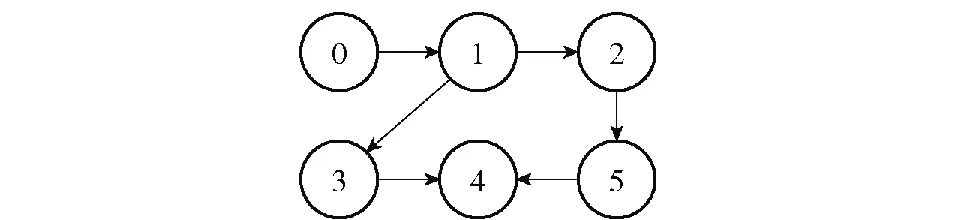
图2 网络拓扑Fig.2 Network topology
定义第i个智能体的非线性函数和外部扰动为fi(t)=[-0.2(xi1(t)+sin (vi1(t))),-0.2(xi2(t)+cos (vi1(t)))]T
f0(t)=[-0.2(x01(t)+sin (v01(t))),-0.2(x02(t)+cos (v01(t)))]T
di(t)=[0.1cost,0.1sint]T,i=1,2,…,5。
参数选为k1=1.2,k2=0.3,k3=0.5,k4=0.8,k5=3.5,k6=2,a=1,b=2,α=0.5,β=1.5,l1=0.1,l2=0.3,ρ=0.2。通过式(16)计算得到稳定时间上界Tmax≈165.6 s。
图3和图4分别描述了跟随者和领导者的位置、速度变化轨迹,从中可以看出所有跟随者均能够在固定时间内跟踪上领导者的状态,收敛时间约为15 s,显然实际收敛时间远小于Tmax。

图3 智能体位置变化轨迹Fig.3 Position trajectories of agents
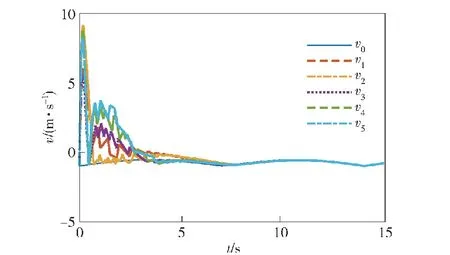
图4 智能体速度变化轨迹Fig.4 Velocity trajectories of agents
图5为动态辅助变量ηi,i=1,2,…,5的变化曲线。由于跟踪控制前期智能体间相对状态误差较大而后期相对状态误差较小,ηi随着时间自适应地动态变化,并且在15 s左右趋于较小的正值。图6为误差‖Ei(t)‖2和触发阈k3‖si(t)‖α+1+k4‖si(t)‖β+1+ηi(t)的变化曲线。由于动态辅助变量ηi的自适应变化,动态事件触发机制会自适应调整触发阈值,并且只有当满足动态事件触发条件时才进行触发,从而避免了频繁触发而发送不必要信息。
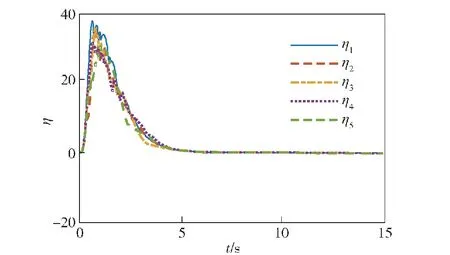
图5 动态辅助变量变化曲线Fig.5 Curves of dynamic auxiliary variables
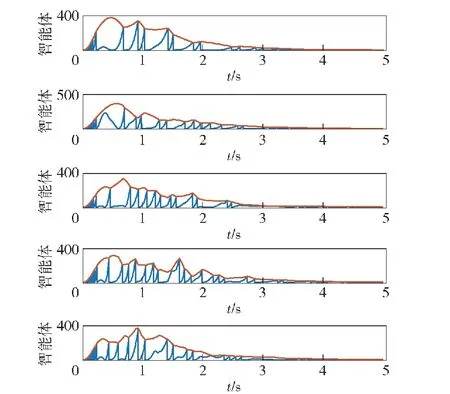
图6 误差和触发阈值的变化曲线Fig.6 Curves of errors and trigger threshold
本文所设计控制协议能实现系统的固定时间跟踪,与文献[25]中有限时间控制方法相比,系统稳定时间不受初始状态的影响。如图7和图8所示,在初始值较大的情况下,仍能在15 s左右实现跟踪控制。
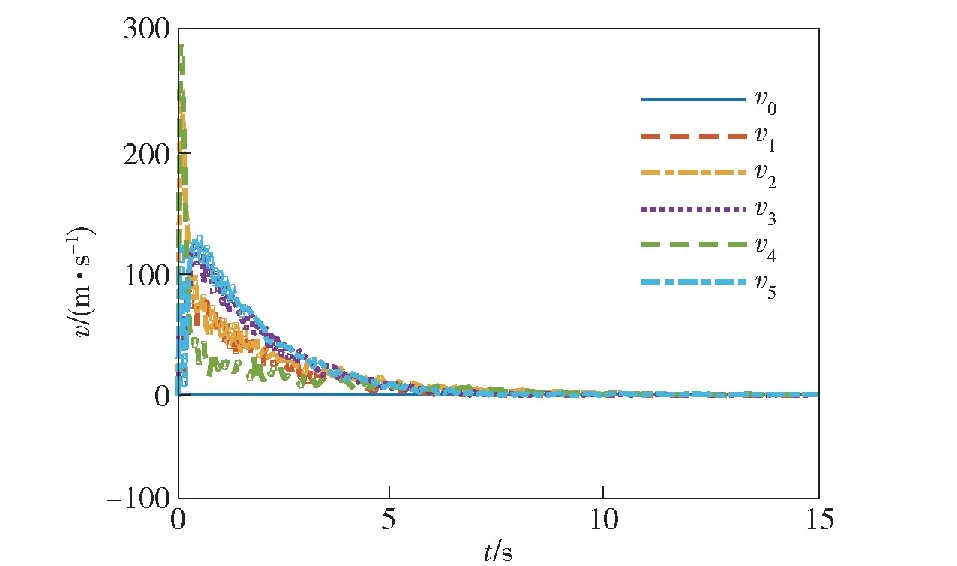
图8 较大初始值下智能体速度轨迹Fig.8 Velocity trajectories of agents with large initial values
图9表示在本文所提出的动态事件触发策略下,跟随者智能体触发时刻图。作为对比,图10给出了采用静态事件触发策略(见式(16))时的智能体触发时刻图。为了更直观表示,表1给出了15 s内两种不同触发机制所对应的触发次数,明显看出动态触发机制下触发次数减少,从而达到有效降低控制器更新频率、节约系统通信和计算资源的目的。

图9 动态事件触发机制下智能体触发时刻Fig.9 Trigger time of agents under the dynamic triggering mechanism
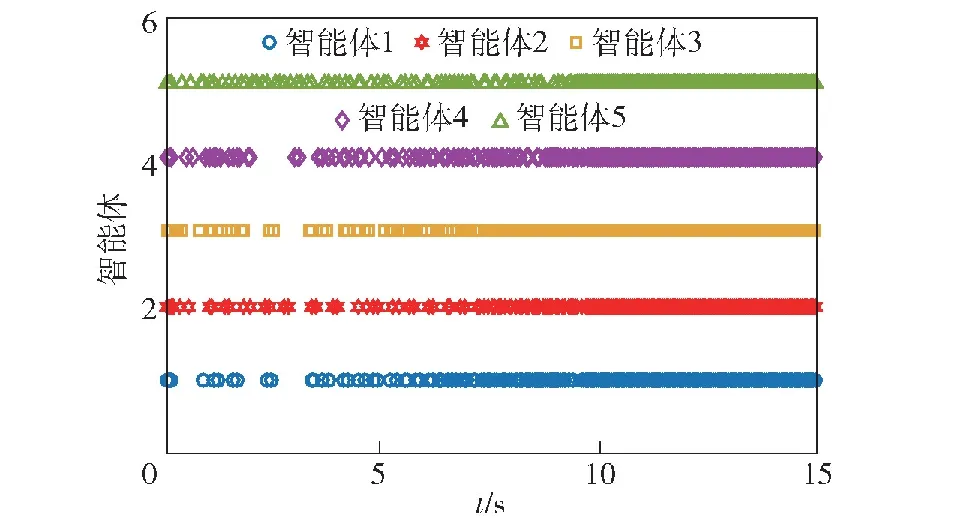
图10 静态触发机制下智能体触发时刻Fig.10 Trigger time of agents under the static triggering mechanism

表1 动态触发机制与静态触发机制次数比较
4 结论
本文结合动态事件触发机制,针对受扰非线性多智能体系统,解决了有向拓扑情况下的固定时间跟踪控制问题。基于相对状态误差信息设计了积分滑模面,并通过引入内部变量构造了动态事件触发函数,从而提出了一种新型动态事件触发固定时间跟踪控制方案,不但有效抑制了外部扰动、满足控制时间的需求,而且在避免Zeno现象的同时节省了网络通信和计算资源,仿真验证了该控制方案的有效性和可行性。在实际应用中,由于网络连接不稳定,智能体间的拓扑关系会发生间断性地变化,后续将研究多智能体系统在有向切换拓扑情况下的动态事件触发固定时间协同控制。