跨介质航行器出入水连续弹道试验与仿真
2023-05-31刘喜燕袁绪龙罗凯鲁娜
刘喜燕, 袁绪龙, 罗凯, 鲁娜
(西北工业大学 航海学院, 陕西 西安 710072)
0 引言
跨介质航行器是融合空中飞行器高速远程优势和基于超空泡减阻技术发展的水下高速航行器隐蔽毁伤优势而提出的一种跨水空两栖新概念航行器[1],它具有空气、水两种介质环境巡航并自由跨越水-气界面的能力,以此能够提升武器装备的多任务和高效突防打击等能力。在反复出入水末端突防弹道设计中,入水-转平-出水弹道的设计和实现是关键技术和难点所在。在该段弹道中,弹体经历入水冲击、空泡形成、发展和溃灭,作用在航行器上的流体动力[2]具有非定常性和不确定性,给动力学建模与控制系统设计带来巨大挑战。
步骤5 使用PI算子依次判断各栖息地,随机产生Kim,Kim∈{1,2,3},若rand<λj,kim成立,则该栖息地选为迁入栖息地;依次判断各栖息地,随机产生kem,kem∈{1,2,3},若rand> <μj,kem成立,则该栖息地选为迁出栖息地;依次判断迁出栖息地的若rand>μj,kem成立,则该栖息地选为迁出栖息地;依次判断迁出栖息地的若randλj,kim成立,则该栖息地选为迁入栖息地;依次判断各栖息地,随机产生kem,kem∈{1,2,3},若rand
在入水过程及弹道偏转研究方面,Truscott[3]通过设计小角度(5°~15°)入水试验工况,研究了不同长细比、弹体头型对入水稳定性的影响,结果表明大长细比、钝头头型能够提高入水稳定性。Kirschner等[4]借鉴超空泡射弹自由飞行试验获得的空泡形态和尾拍特性,总结提出了采用预置舵角的方法可实现航行器机动转弯。袁绪龙等[5]采用计算流体力学(CFD)方法对预置舵角超空泡航行器入水过程进行了数值模拟研究,结果表明随着舵角增大,超空泡航行器弹道转平能力增强。王云等[6]通过高速入水试验获得了4种头型的弹道曲线,结果表明椭圆斜截头弹体更容易产生出水的弯曲弹道。李永利等[7]对跨介质航行器小角度入水跳弹现象进行研究,获得了发生跳弹现象航行器结构特征以及浸水运动机理。时素果等[8]通过试验研究了不同预置舵角下航行器在水平面机动转弯过程中的弹道特性,结果表明预置舵角能够控制实现航行器水平机动转弯。华扬等[9]采用高速摄像方法,对非对称头型入水空泡发展与入水弹道变化特性进行试验研究,结果表明切角头型使得模型头部受到流体的横向偏转力矩作用,从而使得模型弹道发生偏转。
在出入水载荷特性及弹道稳定性研究方面,袁绪龙等[10]通过建立跨介质航行器高速入水多相流场与弹道耦合仿真模型,对预置舵角航行器入水载荷特性进行研究,结果表明预置舵角使得法向过载达到轴向过载的2.7倍。卢丙举等[11]研究了超空泡航行器高速入水过程冲击过载问题,结果表明通气可以有效地降低轴向过载。赵海瑞等[12]通过对头部喷气航行器高速入水空泡特性进行数值研究,发现喷气可促使入水超空泡的生成,且能有效降低冲击载荷。现阶段对出水问题的研究大都集中在航行器低速出水空泡溃灭问题[13-16],研究均表明航行器出水过程中空泡溃灭对其结构与姿态有较大影响。May[17]开展了航行器入水试验研究,发现了超空泡航行器尾拍现象,对尾拍运动对弹道稳定性影响规律进行了总结。曹伟等[18]建立纵平面简化运动方程,对空化数实时变化的自然超泡航行器弹道稳定性进行了研究,并与人工通气情况进行对比,结果表明通气超空泡更有利于维持航行器姿态的稳定。陈诚等[19]开展了通气对超空泡航行器自由运动过程的弹道特性试验研究,结果表明采用通气方式能够提高航行器运动的稳定性。
综上所述,目前针对跨介质航行器的研究工作主要集中在出水或入水过程中的流场、弹道及载荷等方面,田北晨等[20]针对跨介质飞行器开展了近水面触水滑跳运动特性研究,而在跨介质航行器入水再出水连续弹道的研究方面仍处于初步研究阶段。
本文设计一种跨介质航行器试验模型,搭建高速入水试验平台,通过在模型内部安装测量系统记录模型运动参数,利用高速摄像机记录典型空泡形态,实现跨介质航行器入水再出水全过程试验,并对试验过程进行数值模拟,所得研究结果可以为跨介质航行器总体方案设计提供参考。
藜麦购买于沽源县天然园农场;辛/癸酸甘油酯(MCT),印度尼西亚Britz Networks Sdn. Bhd.;尼罗红,阿拉丁试剂有限公司,其它化学试剂均为国产分析纯,实验所用水为二级蒸馏水。
时钟拨回到1998年,从事捕捞32年的千岛湖捕捞队队长叶志清清晰地记得,那一年的捕鱼特别不顺利,全年只打到30多万kg鱼,远少于上一年的150多万kg。与此同时,他在许多水域还发现一个奇怪现象:曾经无比纯净的千岛湖水面,漂浮着一层蓝、绿色的藻类,路过还能闻到轻微异味。按照专业的说法,这就叫“水华”。随后的1999年,叶志清也遇到了同样的情况。
1 连续出入水试验
1.1 试验方案
图1给出了跨介质航行器连续出入水弹道试验方案示意图。通过试验模型内置测试单元模块与高速摄像相结合的方式实现空泡形态与运动姿态的测量。为实现航行器弹道的入水-转平-出水过程,设计一种超空泡航行器试验模型,如图2所示,其基本原理为基于通气超空泡技术实现水中减阻,采用预置舵角为航行器提供抬头升力。
对“空气质量问题”的教学设计方案及部分模拟教学视频的分析表明,尽管不同职前教师的教学认知具有差异性,但从中可以辨认出能够刻画职前教师群体认知特点的、能反映其教学方法认知的教学“模式”.
由于建筑物的装饰装修工程牵涉面广,而且使用的工艺与技术都较为复杂,而且在进行装饰装修的过程中经常会对建筑物的内部构造产生影响。绝大多数的建筑装修工程都是在室内,那么就必须要通过科学、合理的方式来对装修施工的工序进行安排布置。除此之外,建筑装饰施工的现场管理工作相当复杂,而且在进行装饰装修的过程中会使用大量不同的装饰材料与施工人员,因此必须要投入一定的人力来对这几个环节进行严格管理。由于装饰工程当中主要以人工作业为主,并且工程施工周期短,因此在质量的要求上比其他的工程要高,所以也要采取一些有效的方式来对施工质量进行控制。

图2 跨介质航行器试验模型Fig.2 Experimental model of the trans-media vehicle
1.2 试验系统搭建
通过流体体积(VOF)多相流模型[21]实现水气界面的捕捉,控制方程组包括连续方程、动量方程、湍流模型及空化模型,其中湍流流场采用剪切应力传输(SST)k-ω模型[22](其中k为湍流动能,ω为湍流耗散率),采用Zwart-Gerber-Belamri空化模型。应用不含温度修正的Tait状态方程[23]实现液相的可压缩性。

图3 试验现场构建Fig.3 Experimental site
为掌握跨介质航行器入水滑行过程中圆锥段、圆柱段和尾裙段等尾部壳体表面压力特性,提取纵对称剖面线的尾部壳体压力。图16给出了与图15对应状态的航行器尾部壳体压力系数分布规律。压力系数Cp定义为
2 数值仿真方法
2.1 流场求解与运动耦合模型建立
试验系统主要由试验水池、变倾角发射系统、发控系统、运动测量系统、高速摄像机系统、回收装置等组成,试验现场如图3所示。
式中:p为当地压力;p∞为环境压力;ρ为水的密度;v∞为来流速度。
采用动计算域方法实现跨介质航行器出入水全弹道运动过程,其原理为耦合瞬态多相流场与刚体运动的动力学方程,在每个时间步内,通过Fluent软件将获得的流体动力及力矩转化为弹体的平动和转动,进一步计算获得弹体运动姿态,不断更新网格进行迭代求解,最终实现流场与弹道耦合[10]。
跨介质航行器在数值模拟实现平动和转动时,需要将GAMBIT软件划分的计算域网格坐标系设置为CFD求解器计算坐标系。建立位于航行器质心的体坐标系Oxyz,Ox轴沿航行器的轴线方向,Oxy平面为航行器的纵对称面,地面坐标系(Ogxgygzg)与体坐标系在航行器开始运动时刻t0为完全重合的状态,t0时刻定义为航行器质心距离水面0.1 m的位置,如图4所示。在空化器预置舵角产生的操纵力作用下,航行器在Oxy平面内做非定常的高速入水转平及出水运动。
2.3.1 网格数量
图4 坐标系示意图Fig.4 Schematic diagram of the coordinate system
2.2 计算模型与边界条件
本文研究的跨介质航行器由带预置舵角的空化器、圆锥段、圆柱段和尾裙段构成。模型示意图如图5所示,主要参数如表1所示。
图5 跨介质航行器外形示意图Fig.5 Contours of the trans-media vehicle
表1 跨介质航行器主要参数
本文建立的计算域及各边界条件划分如图6所示,航行器所在面为对称面。空化器后的通气孔采用质量流量入口,通气质量流量Q=0.15 kg/s。图6中,g为重力加速度,取值9.81 m/s2,v为航行速度。由于航行器入水速度较高,航行器尾部空泡较长,计算域尺寸应该满足流体不受计算域边界条件的影响,根据前期的计算验证,选取计算域长度L为10倍航行器长度,其中计算域的右侧面距离航行器空化器3倍航行器长度,计算域左侧面距离航行器尾喷管6倍航行器长度,计算域的直径D为30倍航行器直径。综上所述,计算域尺寸取10 000 mm×2 000 mm。
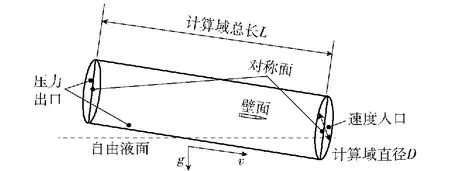
图6 计算域及边界条件Fig.6 Computational domain and boundary conditions
全局计算域采用正交各向异性的结构六边形网格,针对黏性问题,在物面层附近区域通过拆分第1层网格来生成各向异性的结构式分布边界层网格。通过控制长细比,生成的网格长细比不大于2,网格数量约为300万。网格质量分析显示无负体积、凹面和扭曲网格,且正交性高于80°的网格单元占总数的96%以上。网格划分结果如图7所示。
由于环境和资源的限制,世界范围内正在经历着一场能源转型。从建设智能电网到建设能源互联网,发展清洁低碳的可再生能源是这种能源转型努力的具体体现。我国政府已向国际社会承诺,非化石能源占比将在2020年达到15%,2030年达到20%。
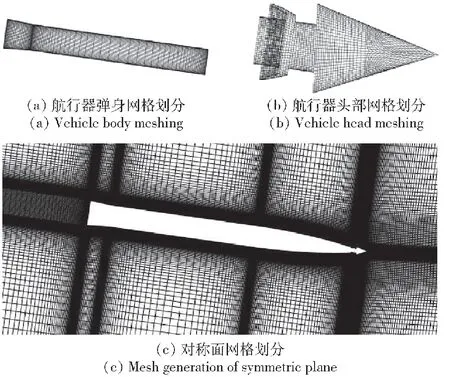
图7 网格划分结果Fig.7 Meshing results
2.3 网格数量与计算推进步长影响
针对部分欠注井注入压力高,并导致注配间泵压较高的情况,在采油工程方面,选取5个注配间8口欠注井开展酸化解堵施工,选取34口欠注井开展化学洗井,措施后注配间柱塞泵压力降低1.0~2.0 MPa,累计节约电量16.3×104kWh,在降压增注的同时兼顾了节能降耗。
网格作为划分计算域的单元,其数量和质量对数值求解有着非常重要的影响。在现有网格划分策略的基础上,不改变网格分布区域尺寸和网格大小递变规律等参数设置。以现有网格作为标准,采用相同的缩放因子,在计算域的3个方向等比例地缩放网格尺寸,最终得到3套网格单元数量不等的网格,即稀疏网格(网格单元数220万)、标准网格(网格单元数300万)和加密网格(网格单元数400万)。图8给出了3种网格数量的俯仰力矩Mz变化曲线。由图8可以看出,网格量对计算结果有一定影响,稀疏网格的计算结果较其他两种网格的结果有较大的差别,而标准网格与加密网格的力矩曲线基本一致,说明标准网格的密度分布基本能够满足计算精度的要求,其计算量较加密网格减小了约30%,标准网格的计算具有较高的经济性,适用于大量仿真研究的需求,故采用标准网格开展仿真研究。
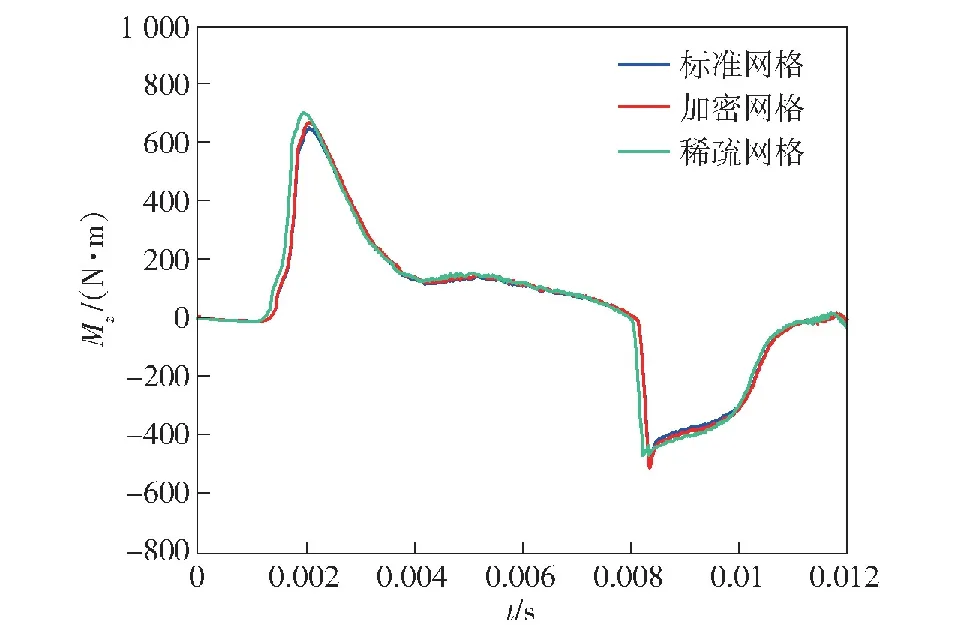
图8 网格数量影响Fig.8 Influence of grid number
2.3.2 计算推进步长
采用网格量为300万的网格进行计算,分别设置3种时间步长Δt1=1×10-6s、Δt2=5×10-6s和Δt3=1×10-5s进行计算。图9给出了3种时间步长下航行器俯仰力矩Mz变化曲线。由图9可知,较大时间步长相对于其他两个时间步长产生较大差异,Δt1与Δt2差异很小,即Δt2作为时间推进步长可以获得准确的计算结果,同时计算成本适当,因此选用Δt2作为本文仿真的推进步长。

图9 计算推进步长影响Fig.9 Influence of time steps
3 结果与分析
3.1 试验结果
本文试验实现了跨介质航行器出入水全弹道运动过程。图10给出了入水初期阶段空泡动态发展的影像。由图10可以看出,跨介质航行器小角度入水(8°入水角)时,入水过程中空泡呈不对称发展,即上空泡壁与航行器壁面的空隙大于下空泡壁与航行器壁面的间隙,弹身处于空泡包裹状态,未发生沾湿现象,呈光滑、透明的空泡,见图10(b)、图10(c)、图10(d)。随着舵效[20](预置舵角为5°)作用导致航行器受到绕质心的抬头力矩,航行器将绕质心逆时针旋转运动,航行器尾裙开始拍击水面,出现尾拍现象,尾部水气掺混剧烈,弹身处空泡仍然光滑透亮,此时尾部空泡内出现浑浊现象,见图10(e)。 随后出现持续滑水现象,见图10(f)、图10(g),弹身附近空泡内水气掺混加剧,尤其尾部空泡更加剧烈。分析认为,由于入水初期,提前通气形成的开口空泡尺度较大,当航行器尾裙向下完成拍击空泡壁面运动后,触水尾拍力较大,使得尾拍力作用下的尾裙浸没深度较大。随着尾部恢复力矩的作用使得航行器向反方向转动,沾湿面积减小,航行器将以滑水方式入水,并伴随尾部空泡的形成。空泡逐步由开口空泡阶段向空泡闭合阶段发展,形成空泡尾流闭合流型。空泡闭合区形成后,由于压力梯度的作用使得水向压力较低的空泡内运动而形成回射流,形成气-液掺混区域,空泡呈浑浊状态。最终发展形成空泡涡团,但未发生脱落,该现象在文献[24]中开展的通气空泡溃灭水洞试验研究中亦曾出现,见图10(h)。 由于水下摄像角度有限,图10 未能详尽地捕捉航行器入水转平全过程。

图10 入水初期阶段Fig.10 Initial stage of water-entry
跨介质航行器流体动力系数定义为

图11 超空泡航行阶段Fig.11 Stage of supercavitation navigation
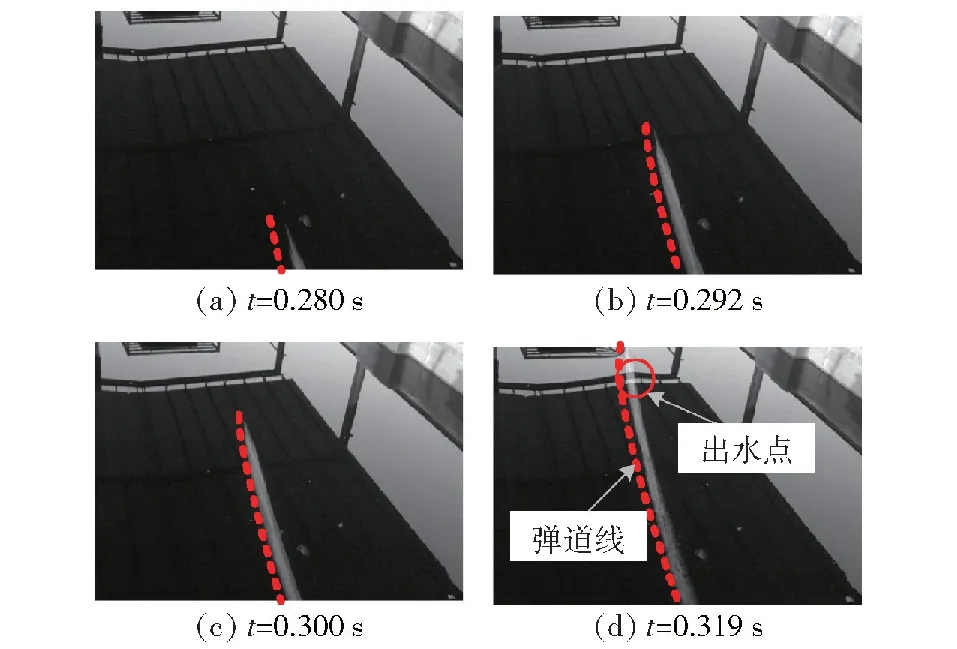
图12 出水阶段Fig.12 Stage of water-exit
图13给出了跨介质航行器试验与仿真弹道参数对比。由图13可以看出,航行速度、质心弹道仿真结果与试验结果趋势一致性较好,最大相对误差为8.5%,表明本文建立的数值计算模型基本合理。设计的跨介质航行器实现了入水再出水的连续弹道过程,跨介质航行器弹道曲线呈抛物线,水中航行15 m后达到最大入水深度,深度约为0.9 m;最大水平航行距离27 m,速度降约为22.1%(出水速度与入水速度的差值与入水速度的比值),同时验证了通气超空泡的形成有效降低了航行器水中航行阻力。
图13 试验结果与仿真结果对比Fig.13 Comparison of experimental and numerical results
3.2 计算结果与分析
3.2.1 跨介质航行器流场与运动特性
由于试验过程未能全程捕捉跨介质航行器出入水全过程的运动过程及其流场发展特性,本文采用试验研究与数值仿真相结合的方法,将试验的入水初始条件作为仿真计算的初始条件,通过设置通气边界条件,实现包覆跨介质航行器的通气超空泡。试验数据验证了数值计算结果的可靠性,在此基础上研究跨介质航行器出入水全弹道过程的流场与运动特性。
图14给出了跨介质航行器出入水过程的压力云图。由图14可以看出,跨介质航行器出入水过程经历头部触水、入水滑行、超空泡航行、滑行出水等阶段。由于空化器预置舵角的存在,其头部驻点压力呈非对称分布,产生的合力矩使航行器产生逆时针转动的抬头力矩。入水滑行阶段,在空化器抬头力矩作用下,航行器绕其质心逆时针转动,产生向下的压力,使得航行器下表面与水接触,以滑水运动形式进入水中,滑水阶段从锥段沾湿开始,弹身周围的空泡轮廓发生挤压变形,见t=0.006 s时刻,直至尾裙完全进入水中结束,此时形成尾部高压区,尾裙端面产生空化器效应,进而生成新的附体空泡,见t=0.015 s时刻;随着超空泡的形成,航行器在空泡内非稳态振荡运动,尾部不断拍击上下空泡壁面而出现高压区,此阶段航行器主要以尾拍运动在水下航行,空化器始终处于沾湿状态,尾裙周期性沾湿,因此,航行器受力主要是空化器和尾裙共同作用的结果,空化器产生恒定抬头力矩,尾部动态振荡产生动态稳定力矩;滑行出水阶段,头部空泡溃灭,尾部空泡径向轮廓增大,这是因为头部空泡溃灭,外界空气大量涌入而形成的倒吸现象,见t=0.333 s时刻;完成出水后,空泡逐渐脱落,跨介质航行器保持出水姿态在水面飞行,见t=0.360 s时刻。
图14 跨介质航行器出入水过程压力云图Fig.14 Pressure contours of the trans-media vehicle during water entry and exit
为了研究通气对跨介质航行器空泡发展形态的影响,表2给出了有无通气工况下不同航行阶段的空泡演化形态,其中通气量Q=0 kg/s为无通气工况,通气量Q=0.15 kg/s为通气工况。由表2可以看出,在不同航行阶段通气有助于空泡形态的生成与发展,空泡长度明显增大(有通气工况的空泡长度l0.15>无通气工况的空泡长度l0),有效减小了航行器与水的接触面积;在滑行阶段,通气工况的航行器上空泡壁面轴向长度减小(有通气工况的上空泡壁面轴向长度λ0.15<无通气工况的上空泡壁面轴向长度λ0),这是因为高压气体作用在上空泡壁面,使其向外翻卷提前,动能被耗散[25],使得在气-水界面处的空泡较早发生溃灭。
未缺血再灌注大鼠脑组织未出现肿胀,脑沟脑回清晰皮层颜色较红润;浅表血管丰富、充盈好、鲜红,脑缺血再灌注大鼠脑组织有明显肿胀脑沟脑回表浅,皮层颜色苍白,表面血管塌陷,基本无血流[1]。如图 1-2所示。
表2 通气对空泡发展形态的影响
图15给出了跨介质航行器滑行阶段浸入不同水深的空泡特征,定义δ来表示航行器的轴向浸没深度,δ=Lc/Lv,Lc为空泡轴向长度,Lv为航行器长度。从图15中可以看出,跨介质航行器在滑行过程中,头部空化器始终保持全沾湿状态,空泡由肩部逐步向尾部发展,航行器附近空泡发生挤压变形,见图15(a)、图15(b);迎水面空泡由航行器纵对称面向两侧挤压而出现沾湿,随着滑行升力的形成,这种挤压趋势减弱,航行器周围的空泡轮廓逐渐回归常态,见图15(c)、图15(d),这是因为尾部形成倾覆力矩与空化器产生的抬头力矩共同作用,使得跨介质航行器的俯仰力矩减小,从而对空泡产生的压力减小。

图15 滑行阶段不同浸没深度空泡特征Fig.15 Cavitation characteristics of different immersion depths in planing stage
试验具体流程为:装配带有内部运动测量系统的试验模型,将模型与适配器装入发射装置炮管中。将变倾角发射装置调至试验所需角度,高压气瓶充气至模型发射速度相对应的发射压力,发控系统控制电磁阀打开,高速摄像机同时触发记录。模型在高压气体推动下开始运动,内测系统触发。试验模型以指定入水角斜射入水,模型内置的内测系统测量并记录模型6自由度运动参数,两套高速摄像机分别从水面和水下记录入水空泡形态和弹道轨迹,回收试验模型,读取模型内置的运动测量系统数据,完成试验。

图16 尾部壳体压力系数分布Fig.16 Distribution of shell pressure coefficients
(1)
1.3疗效评价标准 治愈:胃部炎症和溃疡症状完全消失,恢复情况理想;好转:胃部炎症有所改善,溃疡症状改善,病变范围缩小10%以上;无效:胃部炎症和溃疡没有改善,病情恶化。有效率为治愈率和有效率之和[1]。
由图16可以看出,跨介质航行器入水滑行过程中,尾部壳体最大压力系数峰值先增大后减小,结合图15空泡特征可知,尾部壳体压力增大对周围空泡轮廓挤压加剧;尾裙段出现最大压力系数,峰值高达0.2,压力特性为迎水面缓升、尾端面陡降,这是因为尾裙对流体的发展起到了阻滞作用;圆锥段和圆柱段的压力系数变化不明显。
图17给出了跨介质航行器俯仰角速度ω、俯仰角θ随时间的变化规律。由图17可以看出:跨介质航行器从入水至出水过程中俯仰角速度具有周期振荡特性,幅值呈明显的非对称性,正向俯仰角速度幅值大于负向幅值,俯仰角度随时间呈递增式周期性波动,由入水时θ=-8°逐渐增加到出水时的θ=5°,实现了跨介质航行器入水-转平-出水全过程运动;航行器入水后,受到抬头力矩的作用,绕质心逆时针方向转动,俯仰角速度正向增大,完成入水滑行时俯仰角θ=-8°逐渐增加到θ=-5°;水中超空泡航行阶段,俯仰角速度振荡幅值随时间呈先增加后减小趋势,振荡周期逐渐增大;尾拍过程中,俯仰角速度在达到峰值时均出现了上升段缓升、下降段陡降等现象,这是空泡记忆效应[26]与尾部沾湿部分产生的惯性力共同作用的结果。
图17 俯仰角速度、俯仰角随时间变化规律Fig.17 Pitching angular velocity and angle vs time
3.2.2 跨介质航行器流体动力特性
通过空中布置高速摄像机记录跨介质航行器水中航行与出水过程。图11给出了水中航行阶段典型时刻的弹道影像。从图11中可以看出,跨介质航行器以超空泡状态水中航行,在视场平面内呈近直线弹道。航行器尾部空泡内水气掺杂现象,分析认为是由于弹身拍击空泡壁面而引起流场扰动,试验航行器主要通过尾拍动态稳定机制在水中航行(见图11(a)、图11(b)、图11(c))。航行器空泡尾部区域相对稳定,未发生大量空泡脱落、溃灭现象(见图11(d))。图12给出了出水阶段弹道轨迹发展。由图12可以看出,跨介质在出水过程中,随着航行器抬头偏转,发展形成弯曲空泡,泡内水气混浊现象加重,直至完成出水,见图12(d)。
(2)
式中:Cx、Cy和mz分别为跨介质航行器的轴向力系数、法向力系数和俯仰力矩系数;Fx、Fy分别为跨介质航行器受到的轴向力、法向力;S为圆柱段的横截面积。
我的小弟是个音乐家。每天我练习弹古筝时,他就随着音乐有节奏地手舞足蹈。兴奋时,还会响亮地“依依哦哦”直叫,好像在放声歌唱。平时他一到我的房间,就特别喜欢爬到古筝那去站起来,乱抓乱摸古筝的琴弦,像在模仿我弹琴的样子。有时候,他没站稳摔倒在古筝旁也不哭,而是很坚强地爬起来,再试一次。
图18给出了跨介质航行器各部分的流体动力随时间变化曲线。由图18可以看出:
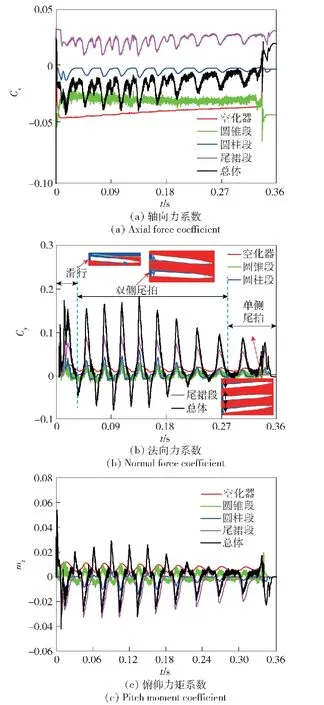
图18 航行器流体动力变化曲线Fig.18 Variation curve of the vehicle’s hydrodynamic coefficients
1)跨介质航行器总体轴向力系数呈脉冲式振荡规律,当航行器出现沾湿时,轴向阻力增加,航行过程中轴向力系数在平均值0.020附近减幅振荡。航行器总体轴向力主要由空化器、圆锥段、尾裙段构成。其中,空化器在水下航行过程中具有固定的沾湿面积,空化器轴向力系数随时间变化较小,基本稳定在0.040左右;圆锥段和圆柱段基本处于空泡包裹状态,轴向力系数基本稳定,分别在0.025和0.010左右,圆锥段的轴向力系数主要由气动压差阻力贡献,圆柱段的轴向力系数则由气动压力阻力和沾湿面产生的水动阻力贡献;尾裙段轴向力系数由气动产生的压差阻力和沾湿产生的滑行阻力贡献,轴向力系数始终为正值。分析认为形成闭合空泡后产生的回射流作用在尾端面形成了推力效果[27],回射流流线如图19所示。
SW1(config-if-range)#sw mode tr //将三层交换机SW1的f0/0与f0/1两个端口设置成TRUNK工作模式

图19 回射流流线图Fig.19 Flowline diagram of the re-entrant jet
2)跨介质航行器法向力系数和俯仰力矩系数以脉冲形式周期性变化,其脉动幅值随时间先增大后减小;在0~0.027 s区间,航行器处于滑水沾湿状态,与图10(f)的现象基本一致,航行器入水完成首次尾拍运动后,与水体接触,呈滑水运动特征,法向力和俯仰力矩呈先增大后减小变化规律,其幅值始终为正值,表现为升力,此阶段出现最大俯仰力矩系数,其峰值高达0.060,航行器受到的弯矩与升力、抬头力矩以及与水的沾湿位置有关,计算获得最大峰值时的头部截面(截面位置及受力示意图见图20)弯曲载荷为3 400 N·m。由此可见,带预置舵角跨介质航行器高速入水冲击形成的抬头力矩峰值对航行器结构强度有较高要求;在0.027~0.280 s区间,航行器尾部上下拍击空泡壁面,形成了双侧尾拍现象,体现为法向力系数和俯仰力矩系数呈现等幅或减幅周期性振荡特性,下拍击力幅值(呈现为升力特性)大于上拍力幅值,使得航行器实现入水转平、水中稳定航行以及抬头出水等运动过程;在0.280~0.360 s区间,航行器以单侧向下拍击空泡壁面完成出水运动,在完成一次向下拍击周期后,航行器在空泡内周期性上下小幅摆动,维持动态运动稳定,其法向力系数和俯仰力矩系数呈脉冲形式周期性变化特征。其中,空化器贡献恒定的升力和抬头力矩,尾裙贡献的升力和俯仰力矩所占比例最大,提供的恢复力矩远大于前端产生的抬头力矩,形成了抑制攻角增大的恢复力矩。总体俯仰力矩系数在零值附近正负周期性波动,抑制了攻角的持续增大。圆柱段和圆锥段法向力系数均以脉冲形式周期性变化,脉冲幅值和周期变化规律基本一致。

图20 航行器截面位置与受力示意图Fig.20 Sectional position and force diagram of the vehicle
表3给出了跨介质航行器超空泡航行阶段尾裙段与空泡的相对位置。由表3可以看出:当航行器发生尾拍向下拍击下空泡壁时,尾裙浸没深度要大于尾拍向上拍击上空泡壁面的浸没深度,与图18(b)中航行器法向力特性相对应,且法向力越大,浸没深度越大;空泡弯曲变形伴随整个超空泡航行阶段,随着航行器出水由双侧尾拍转变为单侧尾拍,上空泡壁面逐渐恢复。
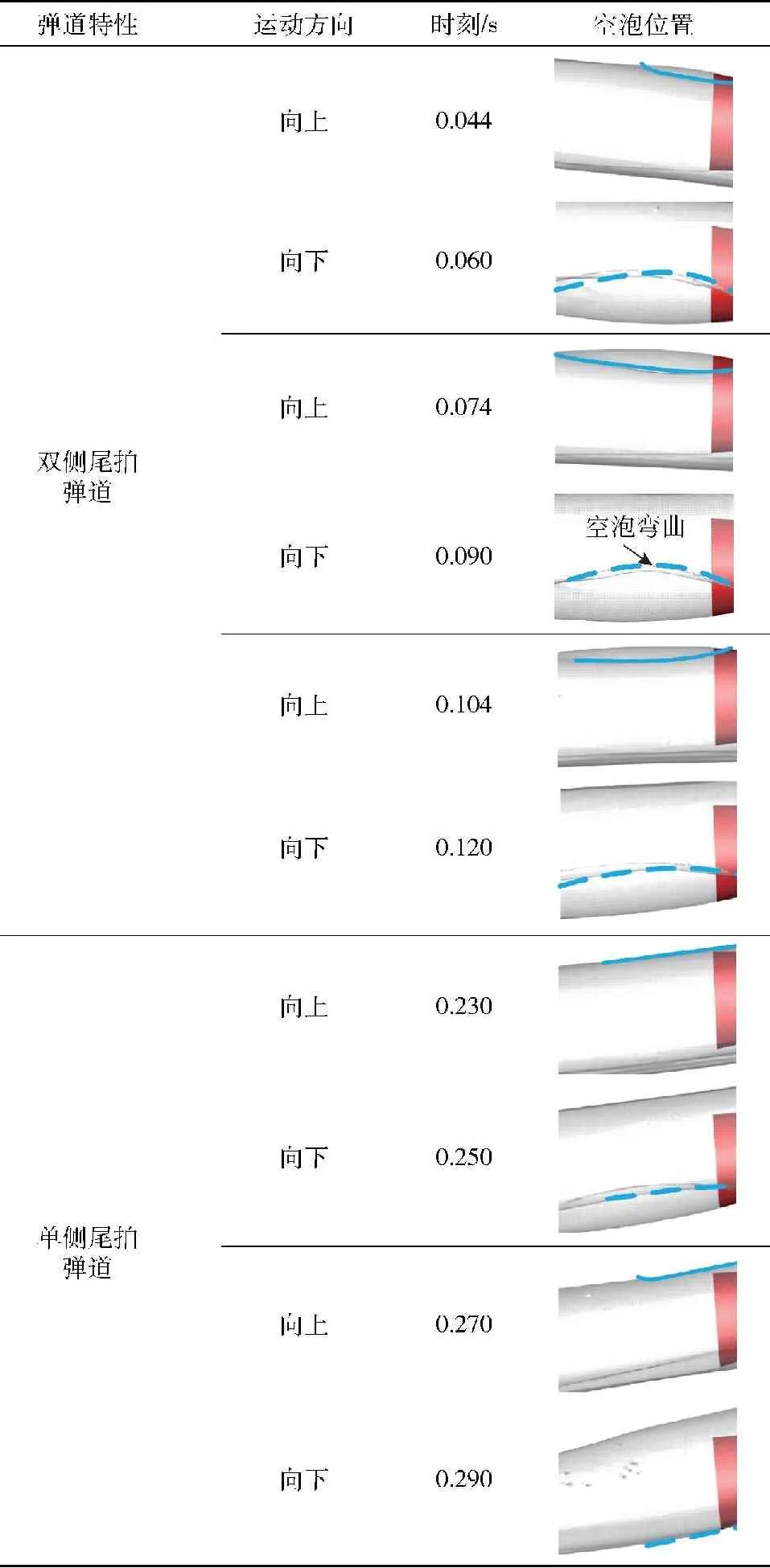
表3 尾裙与空泡相对位置
4 结论
本文设计了一种5°预置舵角+尾裙组合形式的跨介质航行器,针对该模型开展了连续出入水试验和数值仿真研究,对航行器出入水过程的运动特征和流体动力特性进行了分析。得出以下主要结论:
1)该跨介质航行器可以实现出入水连续弹道过程,其弹道轨迹呈类抛物线状,最大入水深度为0.9 m,最大水平航行距离为27 m,出水/入水速度降为22.1%,通气超空泡减阻效果显著。
2)跨介质航行器出入水全弹道运动过程可分为入水阶段、超空泡航行阶段以及出水阶段:入水阶段,航行器受到预置舵角产生的抬头力矩作用,以尾裙稳定滑行方式入水实现航行器入水-转平运动;超空泡航行阶段,航行器主要以双侧尾拍运动为主,维持水中弹道稳定;出水阶段,航行器以单侧尾拍运动方式完成出水运动。
3)跨介质航行器出入水连续弹道过程中流体动力呈脉冲式振荡特性,轴向力和法向力系数随沾湿面积增大而增大;入水初期,航行器受到较大的弯曲力矩作用,对跨介质航行器的结构强度提出一定的要求;预置舵角锥形空化器提供稳定升力和抬头力矩,是航行器实现入水-转平-出水运动的重要因素,尾裙提供的恢复力矩使得俯仰角速度减幅周期性变化,进而提高了航行器出入水弹道的稳定性。