基于融合特征的无人履带车辆道路类型识别方法
2023-05-31刘佳刘海鸥陈慧岩毛飞鸿
刘佳, 刘海鸥, 陈慧岩, 毛飞鸿
(1.北京理工大学 机械与车辆学院, 北京 100081; 2.中国北方车辆研究所 车辆传动重点实验室, 北京 100072)
0 引言
不同类型的道路其阻力系数、不平度、附着系数等参数有着明显差异,会对车辆性能产生重要影响。赵丰根据道路的不平度等级对车辆半主动悬架的控制参数进行优化,提高了悬架系统的减振性能[1]。颠簸道路会造成车辆油门的剧烈变化,进而导致频繁换挡,影响车辆的动力性和经济性[2]。道路阻力系数会直接影响车辆动力学模型参数,从而对车辆动力性产生影响。车辆在低附着路面行驶时易发生滑转滑移甚至甩尾失控,其行驶稳定性裕度难以精确可控,行驶轨迹不确定性较大。对于相同类型的道路,滚动阻力系数与车辆速度等参数之间的关系曲线、最大转向阻力系数、附着系数与滑移率之间的关系曲线等是一致的,路面不平度函数也具有相似的统计规律,因此对道路类型进行识别后,可以进一步识别阻力系数、附着系数、路面不平度等级等参数。无人履带车辆通常行驶在复杂的非结构化道路上,经常遇到起伏大、泥泞多的道路环境,其性能极易受到路况的影响,因此在其进行悬架控制、自动换挡决策、路径规划等任务时,首先识别道路类型,然后对阻力系数、附着系数、路面不平度等级等参数进行识别,进而根据识别结果调整决策控制策略及参数,有利于优化车辆的行驶效率、通过能力等,提高无人履带车辆对各种道路的适应能力。因此道路类型识别对无人履带车辆的性能提升至关重要。
路面图像可以提供丰富的色彩和纹理信息,因此基于图像的道路类型识别方法得到广泛应用。邹家祥结合图像色彩统计特征与局部二值模式(LBP)特征,分别使用支持向量机(SVM)与双层分类器实现地形识别,双层分类器即首先根据颜色特征大致判断地形类别,之后根据纹理特征确定具体的地形[3]。王振宇[4]采用深度卷积神经网络技术进行路面图像识别,并对多种网络框架的训练学习效果进行对比,选择最优网络结构,然后对其相对应的不同路面等级进行模糊分类。Dewangan等[5]提出了一种基于卷积神经网络的道路分类网络,用于道路表面的精确分类,在复杂的道路环境中也表现优越。abanovi等[6]开发了基于可视化数据和深度神经网络的路面实时分类系统,并应用于汽车制动系统。Wang等[7]将SVM和卷积神经网络结合,实现了基于图像的道路类型识别。王志红等[8]将语义分割模型作为基础模型,同时改进模型输出网络,将数目最多的像素类型标签作为最终道路类型的识别结果。Liu等[9]基于道路图像,利用MobileNetV2卷积神经网络框架和迁移学习实现了道路类型识别。此类方法在光照条件良好的环境中性能优越,但是当光线较强或较弱、导致成像质量不佳时,其性能会大大下降。另外,当履带车辆行驶过程中的尘土、泥浆等导致道路图像画质恶劣时,也会使得该方法性能下降。
很多学者利用悬置质量垂向加速度信号进行道路类型识别,一般使用加速度计测得的垂向加速度表示垂向振动。Wang等[10]通过测量车辆振动,并根据车辆的速度和四分之一动力学模型计算出道路轮廓,从道路轮廓与加速度数据中提取特征,利用机器学习方法实现了路面分类。Bai等提出了一种基于车辆三维振动的地形分类方法,利用快速傅里叶变换(FFT)将三个方向的加速度变换到频域,提取特征向量后,分别采用改进的BP神经网络[11]与多层感知深度神经网络[12]得到振动与地形类型之间的映射关系。Wang等[13]以原始振动信号的时域以及时域、频域和时频域的组合特征为输入,利用随机森林(RF)算法对道路进行了分类。Skoczylas等[14]提取加速度计和陀螺仪数据的频域特征,以多层感知机为分类器实现了道路类型识别。Cheng等[15]提出了一种基于振动的自主机器人地形分类框架,利用半监督学习实现了地形分类。Shi等[16]利用半监督学习方法,研究了基于振动的地形分类问题,针对地形采样序列中存在的内在时间相关性,提出了一种改进的拉普拉斯SVM法,以利用未标记数据提高分类性能。Andrades等[17]利用自组织映射算法对路面进行分类和估计,用轮胎在6种不同表面上滚动产生的振动数据生成道路分类模型。此类方法不受光照影响,环境适应性强,但其准确率较低,无法辨别不平度相似的路面。
由于使用单一信号存在局限性,一些文献提出将多种信号进行结合,实现优势互补。王世峰等将路面图像的纹理特征、直方图特征与悬置质量振动特征结合,使用神经网络分类器实现道路类型识别[18],该文献使用传统的图像特征进行识别,相比于卷积神经网络提取的深度特征,传统特征鲁棒性差,准确率低。Mauro等提出了一种通过收集车辆与环境相互作用机理的重要信息来进行地形识别的方法,该方法使用大量传感器以得到车轮纵向力、驱动扭矩、功率、摩擦系数、纵向刚度等变量,之后提取其统计特征,利用SVM实现了地形识别[19]。Bonfitto等使用人工神经网络(ANN)区分路面的干燥、潮湿、结冰3种情况,输入特征向量包括横纵向加速度、横摆角速度、4个车轮线速度的频谱分析和统计分析,共64个特征[20]。文献[19]和文献[20]提出的方法均需要加装多个传感器,复杂度高,实用性低。
本文提出一种基于融合特征的无人履带车辆道路类型识别方法,将道路图像的深度特征和悬置质量垂向加速度的统计特征相结合,利用机器学习分类算法实现道路类型识别。道路图像的深度特征利用卷积神经网络进行提取。对于悬置质量垂向加速度信号,本文考虑其时域信号、频域信号以及功率谱密度信号。本文共考虑碎石路、土路、沙路和铺面路4种常见的非结构化道路。对使用单一特征和融合特征的方法进行对比,结果表明融合特征的准确性和环境适应性大大优于单一特征,并且相比仅使用图像特征的方法,基于融合特征的方法实时性损失极小。另外,本文对比了SVM、ANN、决策树(DT)、Bagging、RF 5种机器学习分类算法在准确性和实时性方面的性能,结果表明SVM和RF在准确性和实时性方面都表现优越,总体准确率可以达到90%以上,识别速度可以达到14帧/s。
1 道路类型识别方法设计
本文提出的基于融合特征的道路类型识别方法总体框架如图1所示,该方法包括图像特征提取网络训练、融合特征提取、道路类型识别模型训练、道路类型在线识别4个部分。离线时,首先利用大量路面图像训练卷积神经网络,去除最后的全连接层和输出层后得到图像深度特征提取网络;之后利用图像特征提取网络提取路面图像的深度特征,与垂向加速度时域、频域、功率谱密度信号的统计特征进行连接,得到融合特征;将融合特征作为输入、道路类型标签作为输出,使用机器学习分类方法训练道路类型识别模型。在线时,首先提取路面图像与垂向加速度的融合特征,然后输入训练好的道路类型识别模型,得到道路类型。
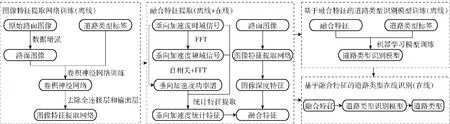
图1 道路类型识别方法整体框架图Fig.1 Overview of the identification method for proposed road types
1.1 图像特征提取网络训练
本文使用卷积神经网络提取道路图像的深度特征,相比LBP特征、直方图特征等传统的图像特征,深度特征鲁棒性更强,分类准确率更高。卷积神经网络通常包括多层卷积层、池化层以及最后的全连接层和输出层,其中,前二者用于提取图像的深度特征和降低计算量,后两者用于将深度特征映射到类别。
本文使用迁移学习,对MobileNetV2的网络结构进行调整。如图2所示,MobileNetV2的一个网络块包括深度可分离卷积+ReLu层、卷积层、卷积+ReLu层以及相加层[21]。对于一个n×n×d的三维矩阵,卷积处理就是以一定步长遍历三维矩阵,遍历时使用m×m×d的卷积核对经过的矩阵元素进行卷积操作,其中,n为三维矩阵的长度和宽度,m为卷积核的长度和宽度,d为三维矩阵和卷积核的深度。两矩阵的卷积如下式:
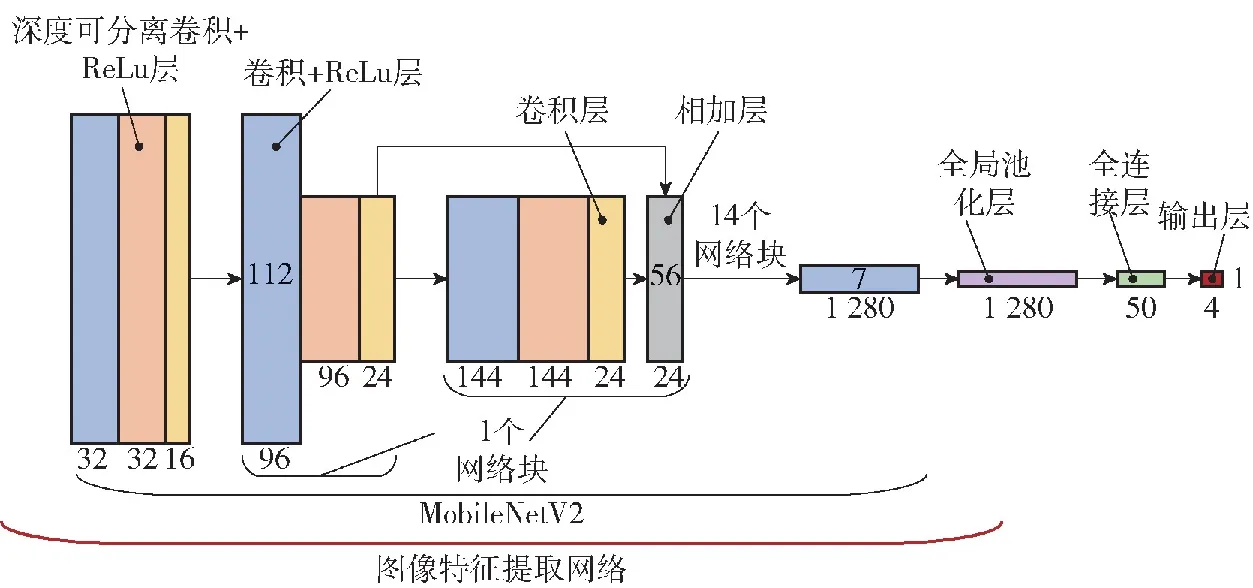
图2 卷积神经网络结构图Fig.2 Convolutional neural network structure
(1)
式中:x和y均为参与卷积运算的矩阵;xij为矩阵x的第i行、第j列元素;yij为矩阵y的第i行、第j列元素。深度可分离卷积包括逐通道卷积与逐点卷积两步,逐通道卷积就是使用d个m×m×1的卷积核分别对三维矩阵的每一层进行卷积,逐点卷积就是使用1×1×d的卷积核对三维矩阵进行卷积,深度可分离卷积可以减少卷积核的参数,有利于实现网络的轻量化。ReLu激活函数用于进行非线性化处理,对于矩阵中的每个元素,进行以下处理:
(2)
式中:ReLu(x)表示ReLu激活函数。相加层将两个维度相同的三维矩阵的元素进行逐一相加。
在MobileNetV2后添加全局池化层、全连接层和输出层,得到完整的卷积神经网络。如图2所示,全局池化层需要处理一个尺寸为7×7×1 280的三维矩阵,求出每一层元素的均值就可以得到尺寸为1×1×1 280的矩阵。全连接层设置了50个神经元。由于本文考虑了4种道路类型,输出层包括4个神经元。
为减小训练时的计算量,本文使用了在大型图像数据集ImageNet上预训练的网络参数,即图2卷积和深度可分离卷积使用的的卷积核中的元素值。在训练时,仅对MobileNetV2的最后4层以及全连接层、输出层的参数进行训练,其余参数冻结。训练完成后,去除全连接层和输出层,仅保留图2中的特征提取网络,用于提取图像的深度特征,图像特征共1 280维。
1.2 融合特征提取
本文使用路面图像和垂向加速度的融合特征进行道路类型识别,实现两种信号的优势互补,以提高识别的环境适应性和准确性。其中,前者体现了道路的外观特征,使用训练好的特征提取网络进行深度特征提取;后者体现了道路的不平度特征,本文考虑了其时域信号、频域信号以及功率谱密度信号的多种统计特征。假设悬置质量的垂向加速度信号为平稳随机信号。本文在进行道路类型识别时,使用当前时刻的图像数据以及过去10 m的垂向加速度数据,每隔5 m识别一次。通过插值法将垂向加速度数据的长度统一到200个点。
1.2.1 频域信号获取
采用FFT从时域信号获取频域信号,它可以将时域信号分解为多个正弦信号的叠加,从而建立从时域到频域的变换关系。针对长度为M的有限长离散时间信号x(n1),可以得到其P点的离散傅里叶变换:
(3)
式中:P为离散傅里叶变换区间的长度,P≥M,本文中P=M;X(k)表示离散傅里叶变换后的第k个点。

1.2.2 功率谱密度信号获取
功率谱密度函数表示信号的功率密度沿频率轴的分布,它与信号的自相关函数组成一个傅里叶变换对。离散信号x(n)的自相关函数R(m)如下式:
(4)
对离散信号的自相关函数进行FFT,即可得到离散信号的功率谱密度。
1.2.3 垂向加速度统计特征提取
本文使用12个常用的统计量来表示垂向加速度的特征。
1)均值:
(5)
式中:N为离散信号x(i)中点的个数。
2)标准差:
(6)
3)方根幅值:
(7)
4)均方根值:
(8)
5)最大绝对值:
s5=max |x(i)|
(9)
6)偏斜度:
(10)
7)峰度:
(11)
8)峰值指标:
(12)
9)裕度指标:
(13)
10)波形指标:
(14)
11)脉冲指标:
(15)
12)过零次数s12:表示信号过零点的总次数。
对于垂向加速度时域信号,提取s1~s12共12个统计量,对于频域和功率谱密度信号,提取s1~s11共11个统计量,因此垂向加速度统计特征共34维。垂向加速度特征与图像深度特征连接后形成融合特征,共1 314维。
1.3 道路类型识别模型
利用机器学习分类算法构建道路类型识别模型。本文对SVM、ANN、DT、Bagging、RF共5种机器学习分类算法进行对比,其中前3种为单模型算法,后2种为集成学习算法。本节对SVM进行详细介绍,其余算法作为对比算法进行简要介绍。
1.3.1 SVM算法
给定样本集D={(x1,y1),…,(xn,yn)},yi∈{-1,+1},SVM的目标为求得一个分类超平面,使两类样本的间隔最大,该分类超平面为
ωTx+b=0
(16)
式中:ω为系数向量;x为输入特征向量;b为偏置项,当ωTx+b≥0时样本x为正例,否则为负例。如果上述分类超平面能够将样本(xi,yi)∈D正确分类,则ω、b满足式(17):
(17)
能够使式(17)中等号成立的样本点称为支持向量,它们距离分类超平面最近,它们到超平面的距离为
(18)
根据上述分析,可知SVM训练时要求解以下问题:
(19)
式中:yi为真实类别标签;n2为训练集中的样本数量。可通过拉格朗日乘子法求得该问题的对偶问题,进而通过求解对偶问题求得ω和b。
为实现非线性分类,可以将样本从原始空间映射到高维空间,样本x经过映射变换为φ(x),κ(xi,xj)=φ(xi)Tφ(xj)为核函数,本文使用高斯核函数:
(20)
式中:σ为高斯核带宽。
为实现多分类,可训练多个二分类支持向量模型,本文选取的多分类模型构建方法为“one vs rest”,就是每次训练模型时,将一个类别的样本看作正例,其余类别的样本看作负例。本文共考虑了4种道路类型,因此共构建4个支持向量分类模型[22]。
1.3.2 其余机器学习分类算法
ANN由多个神经元连接组成。神经元接收输入{x1,x2,…,xm},输出y:
(21)
式中:[ω1,ω2,…,ωm]T为权重向量;b1为神经元阈值;f(·)为激活函数。本文使用单隐层前馈神经网络,输入层神经元接收外界输入,不进行函数处理,隐层与输出层神经元对输入信号进行处理,隐层激活函数为ReLu,输出层激活函数为softmax。本文考虑了4种道路类型,因此输出层神经元有4个。网络中的待求解参数为每个连接的权重和每个神经元的阈值,本文中的损失函数为交叉熵损失,通过误差逆传播算法进行求解。
DT包括一个根节点、若干个内部节点和叶节点,每个叶节点代表一种决策结果,其余节点代表划分特征。初始DT仅包含1个根节点,然后通过选择最优划分特征不断增长,直至达到结束条件。最优划分特征可以根据信息增益、增益率或基尼指数来选择,本文选用基尼指数:
(22)
式中:Gini(D)为样本集合D的基尼值;pi为第i类样本在数据集中的比例;k1为类别总数;Gini_index(D,a)为划分特征a在D上的基尼指数,a在D上共有V个可能的取值;|Dj|表示特征a取值为aj的样本数量;|D|为样本集合D中的样本数量。最优划分特征即为基尼指数最小的特征[23]。为防止过拟合,本文中使用的DT最大深度为15,当节点上的样本数量小于10时停止划分。
Bagging由多个基分类器组成,在训练每一个基分类器时,使用数据集中的随机子集和特征集的随机子集进行训练,最终结果由所有基分类器投票产生[24]。RF是一种以DT为基分类器的Bagging方法,DT从候选特征集的随机子集中选择最优划分特征[25]。
2 数据采集与卷积神经网络训练
2.1 数据采集与预处理
为对图像特征提取网络及道路类型识别模型进行训练,并测试所提方法的性能,使用图3所示的履带式平台采集大量不同道路、不同工况下的图像及垂向加速度数据。平台为双侧独立电驱动平台,两侧驱动轮与驱动电机相连。该平台安装有相机、惯性导航系统、差分GPS等多种传感器,它们均位于车辆的纵向对称面上,属于悬架之上的部分。相机安装在车辆的前部位置,位于车厢上方,数据采集频率为10 Hz。惯性导航系统位于驾驶座位下方,差分GPS位于车辆两油箱中间的车顶位置,二者结合组成组合导航系统,数据采集频率为50 Hz。使用ROS采集数据,每一帧数据均使用ROS时间戳进行标注。

图3 履带式数据采集平台Fig.3 Tracked data collection platform
本文共考虑4种常见的非结构化道路:碎石路、土路、沙路和铺面路。4种道路均包含多段曲率不同的弯道,最小曲率半径约为5 m。平台在4种道路上的行驶速度均位于[5 km/h,20 km/h]区间内。道路存在多个坡度不同的坡道,最大坡度约为15°。数据采集时,道路均处于干燥无积水状态。
数据预处理包括时间同步、道路区域提取、消除重力加速度影响和数据分段四步。时间同步目的为将图像数据和导航数据两种不同来源的数据进行时间对齐,以便于后续的融合特征提取,根据ROS时间戳进行对齐。道路区域提取目的为去除图像数据中的环境信息,仅保留道路区域的图像,以防止环境信息对分类器产生干扰,采集图像的下半部分即为需要保留的道路区域。由于惯性导航系统采集的垂向加速度会包括重力加速度在悬置质量垂向上的分量,需要根据重力加速度的值和坡度信息消除重力加速度影响。数据分段就是将处理好的垂向加速度划分为每段10 m,其中相邻段存在5 m的重叠区域,划分完成后可获取垂向加速度的频域信号和功率谱密度信号。预处理后的4种道路数据如图4所示,从中可以看到4种道路在外观及不平度方面均存在差异:预处理后的数据集中共有2 444组碎石路数据,2 080组土路数据,2 148组沙路数据,2 964组铺面路数据。

图4 4种道路图像数据与垂向加速度数据Fig.4 Images and vertical acceleration data of four road types
2.2 卷积神经网络训练结果
使用采集的大量道路图像对卷积神经网络进行训练,为提高数据多样性,对图像进行数据增强处理,包括高斯模糊、运动模糊、亮度调节和对比度调节,为模拟夜间行驶的工况,在数据中加入一部分全黑图像。为减小计算量并使图像与网络相适配,将所有图像的尺寸调整为224×224×3。将数据按照4∶1的比例随机划分为训练集和测试集,测试集用于测试模型性能以及判断训练是否过拟合。为减小内存占用,使用小批量训练方法,每次迭代仅取一部分数据,本文将批量尺寸设为300,迭代次数为 150次。训练时使用的优化算法为自适应动量估计法,并设置学习率递减。本文使用的损失函数为交叉熵损失函数。
训练过程中训练集与测试集的准确率和损失值变化情况如图5所示。由图5可见:未训练模型在训练集和测试集上的准确率均为20%左右;训练初期,模型在训练集上的损失值出现振荡,可能是学习率较大引起的,当迭代60次后,训练基本达到收敛,训练集损失值稳定在0.4附近,准确率在80%左右;训练初期,模型在测试集上的准确率和损失值均出现振荡,当迭代60次后,损失值稳定在0.4附近,准确率达到80%左右;训练收敛后模型在测试集上的准确率未出现明显下降,因此训练不存在过拟合现象。

图5 训练过程中的准确率与损失值变化Fig.5 Changes in accuracy and loss during training
3 道路类型识别结果
本节首先对使用单一特征和融合特征的道路类型识别方法进行对比,包括准确率和特征提取时间对比,准确率即分类正确的样本占测试集总样本的比例,它们都使用SVM作为机器学习分类模型。之后对SVM、ANN、DT、Bagging、RF 5种机器学习分类算法的准确率和实时性进行对比,5种算法均以融合特征作为输入特征。每一种算法都使用随机搜索方法找到其最优超参数,Bagging算法使用的基分类器是SVM。与2.2节类似,对原始图像进行数据增强处理,并加入一部分全黑图像模拟夜间行驶的工况。使用hold-out交叉验证法评估模型性能,将数据集按照4∶1的比例随机分为训练集和测试集,训练集用于训练模型,测试集用于测试模型的准确率。为确保结果的可靠性,结果取5次独立运行的平均值。
3.1 单一特征与融合特征对比
使用不同特征的道路类型识别模型在测试集上的准确率,结果如图6所示。图6中的图像传统特征为文献[14]中使用的灰度共生矩阵特征与直方图特征。由图6可见,仅使用振动特征的模型准确率为67.88%,仅使用图像传统特征的模型准确率为74.06%,仅使用图像深度特征的模型准确率为81.65%,使用融合特征的模型准确率为90.70%。上述结果表明,相比于图像传统特征,深度特征的准确率提升明显。另外,基于融合特征的道路类型识别方法的整体准确率是最高的。
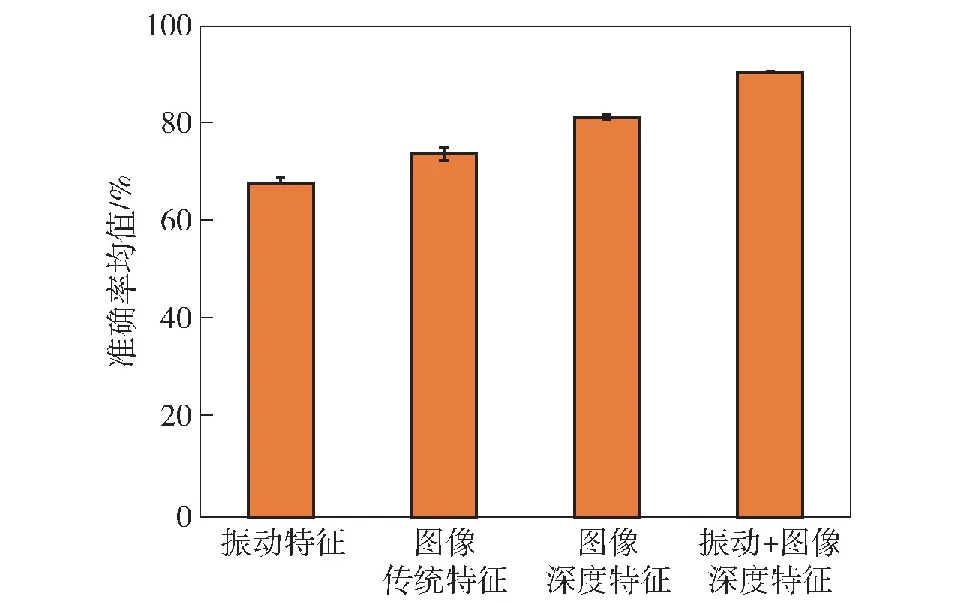
图6 使用不同特征的道路类型识别方法准确率Fig.6 Accuracy of road types identification methods based on different features
使用不同特征的道路类型识别模型在测试集上的混淆矩阵,结果如图7所示。由图7可见:1)仅使用振动特征的模型对铺面路的识别准确率是最高的,达到86.99%,因为与其他3种道路相比,铺面路比较平坦,比较容易通过振动特征区分;对沙路的识别准确率最低,仅为48.45%,有31.55%的沙路被错误识别为碎石路,可能是因为起伏路面引起车辆的俯仰振动与垂直振动有耦合作用,因此,通过振动信号特征区分路面准确率不高。2)仅使用图像深度特征的模型对铺面路的识别准确率也是最高的,达到了99.81%,对其余3种道路的识别准确率均在74%左右,原因是仅使用图像特征无法对夜间行驶工况下的全黑图像进行识别,而训练集中的铺面路是最多的,因此模型将全黑图像识别为铺面路。3)使用融合特征的模型对4种道路的识别准确率均达到了85%以上,相比仅使用振动特征和仅使用图像特征的模型有了大幅度提升。但使用融合特征的模型对于铺面路的识别准确率低于仅使用图像深度特征的模型,原因是在夜间行驶工况下,当仅使用图像深度特征时,模型将黑暗的路面图像识别为铺面路,其他3种道路也会被误识别为铺面路;而当使用融合特征时,模型可以依靠振动信息识别道路类型,使得一部分铺面路被误识别为其他道路。
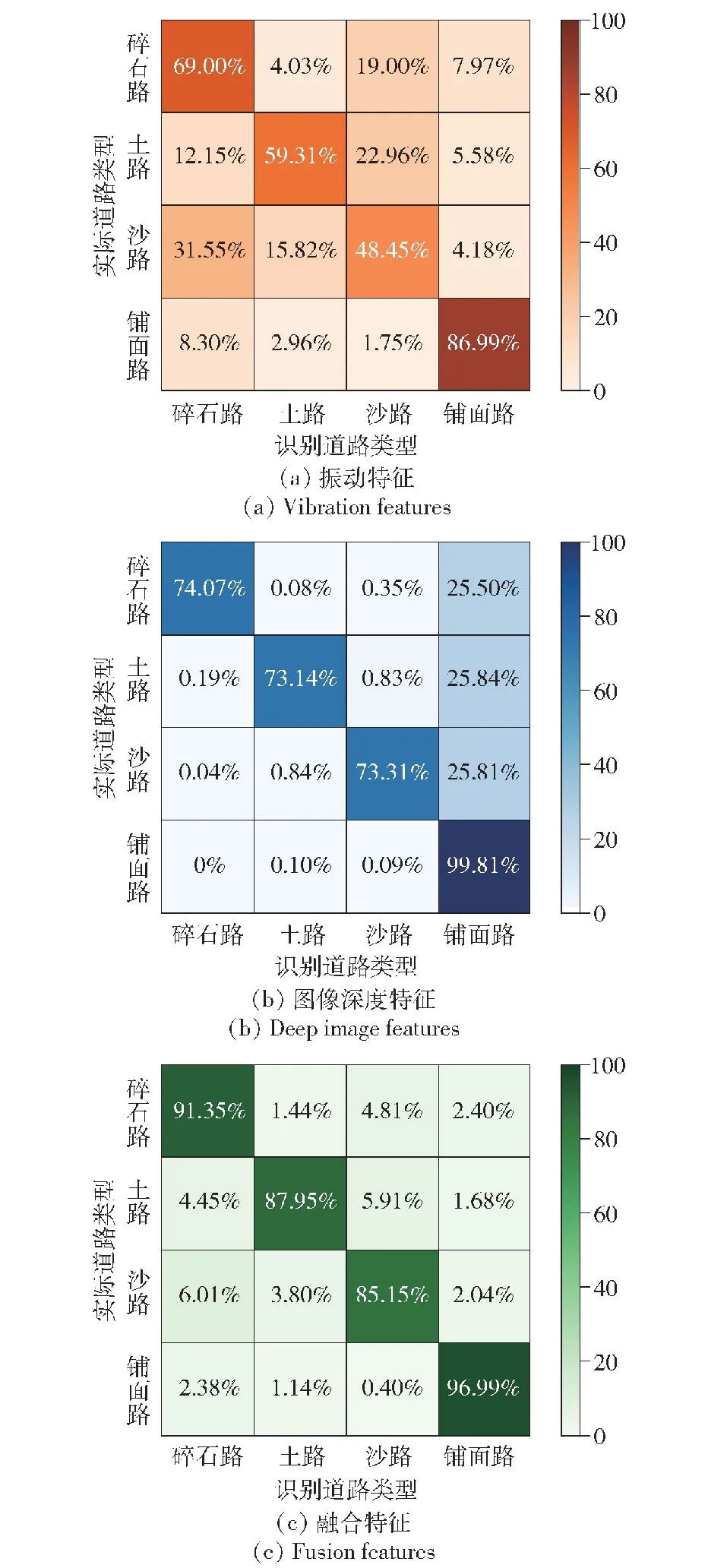
图7 使用不同特征的道路类型识别方法混淆矩阵Fig.7 Confusion matrixes of road-type identification methods based on different features
图8展示了在道路图像清晰、模糊、过亮以及夜间行驶4种不同情况下使用不同特征的道路类型识别结果,4张道路图像图8(b)~图8(e)对应的垂向加速度信号均为图8(a),它们的实际道路类型均为沙路。由图8可以看到:当道路图像成像清晰,或者图像有轻微模糊时,仅依靠丰富的图像深度特征可以准确识别道路类型;当道路图像过亮或处于夜间行驶工况时,仅依靠图像特征无法准确识别,但结合振动特征可以得到正确的识别结果。上述结果表明,振动特征和图像特征能够互相补充,提高整体的识别准确率和环境适应性。
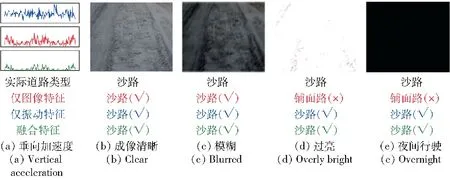
图8 使用不同特征的方法的识别结果Fig.8 Identification results of methods based on different features
本文对单一特征和融合特征的提取时间进行实验统计,实验设备参数如下:CPU Intel Xeon Gold 6142,16核,主频2.6 GHz;GPU GeForce RTX 3080,显存10.5 GB;内存27 GB。使用卷积神经网络提取图像深度特征时,使用显卡加速功能,提取时间为67.56 ms,图像传统特征的提取时间为27.74 ms,垂向加速度统计特征提取时间为0.67 ms。融合特征提取时间为68.23 ms。由图6以及统计的特征提取时间可以看到:虽然图像深度特征的识别准确率高于传统特征,但深度特征提取时间较长,是传统特征的2.4倍;融合特征提取时主要将时间花费在图像深度特征提取上。因此,相比仅使用图像深度特征的方法,基于融合特征的方法实时性损失极小,并且环境适应性提升明显。
3.2 不同机器学习算法对比
基于不同机器学习分类算法的道路类型识别模型在测试集上的准确率如图9所示。由图9可见:SVM算法、Bagging算法和RF算法的准确率较高,分别为90.70%、90.73%、90.56%;Bagging算法以SVM为基分类器,集成方法的性能提升效果不明显;RF算法是以DT为基分类器的一种集成方法,DT的准确率为87.52%,RF算法通过对多个DT模型进行集成,提高了分类准确率;ANN算法的准确率为89.32%,处于第4位。
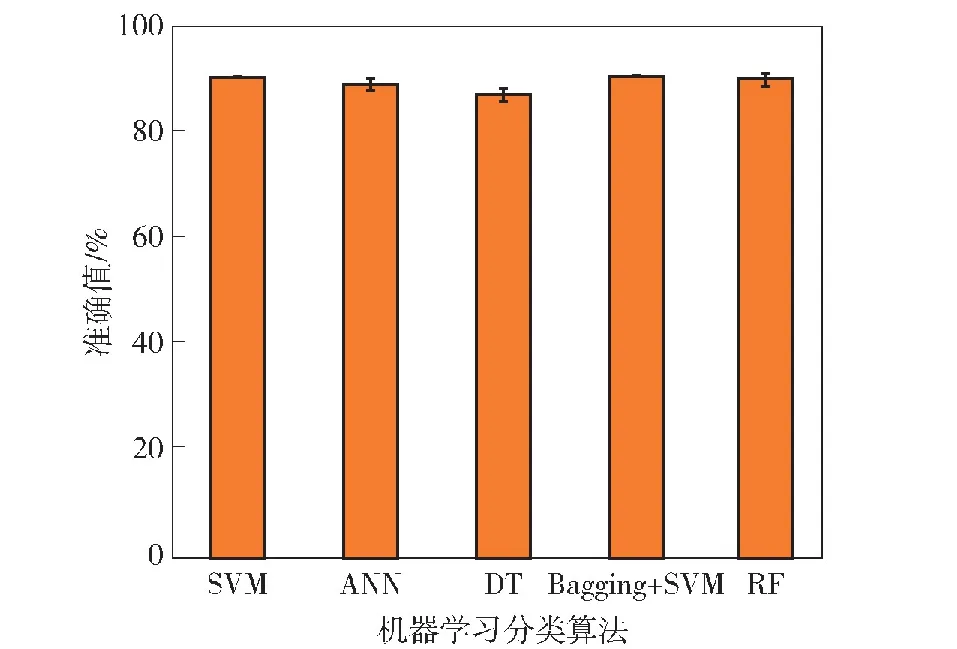
图9 不同机器学习分类算法的道路类型识别准确率Fig.9 Accuracy of road-type identification methods with different machine learning classification algorithms
本文对5种机器学习分类模型在线识别的实时性进行对比,实验设备与3.1节相同,实验结果如表1所示,该结果不包括特征提取时间。从表1中可以看出:Bagging算法的实时性较差,识别一次需要用时44.54 ms;SVM算法和RF算法的实时性相差不大,识别一次用时分别为2.48 ms、3.65 ms;ANN算法和DT算法的实时性较好,识别一次用时分别为0.14 ms、0.08 ms。
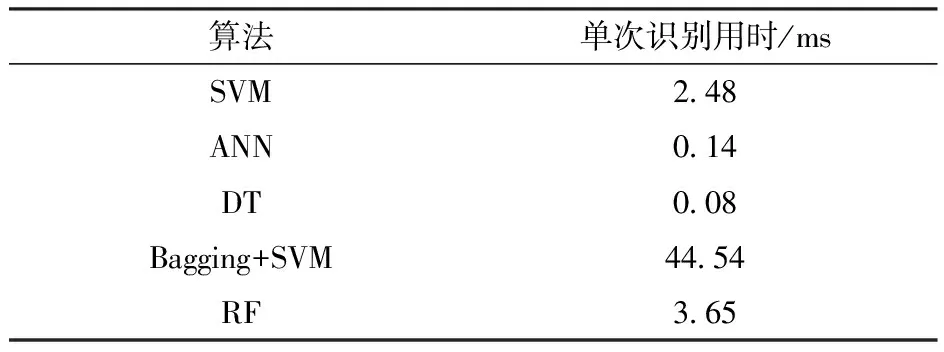
表1 不同机器学习分类算法单次识别用时
总之,SVM和RF在准确性和实时性上都表现优越,总体准确率均可以达到90%以上,识别速度可以达到14帧/s,非常适合用于道路类型识别。
4 结论
本文提出一种基于特征融合的无人履带车辆道路类型识别方法,将道路图像的深度特征与悬置质量垂向加速度的统计特征相结合,识别结果可作为无人履带车辆悬架控制、自动换挡决策、路径规划等任务的先验信息,提高车辆的行驶效率、通过性等性能。得到主要结论如下:
1)使用履带式数据采集平台对碎石路、土路、沙路、铺面路4种常见的非结构化道路进行数据采集,包括图像数据及垂向加速度数据。
2)利用采集到的大量道路图像数据对卷积神经网络进行训练,去除网络的全连接层和输出层后得到图像深度特征提取网络。
3)对仅使用振动特征、仅使用图像传统特征、仅使用图像深度特征及使用融合特征的道路类型识别方法进行对比,结果表明:图像深度特征相比于传统特征准确率更高,但特征提取时间更长;使用融合特征的方法能够实现两种特征的互补,准确性和环境适应性强,并且融合特征提取用时与图像深度特征提取用时相差不大。
4)对SVM、ANN、DT、Bagging、RF共5种算法进行道路类型识别的性能进行对比,结果表明SVM和RF在准确性和实时性方面都表现优越,总体准确率可以达到90%以上,识别速度可以达到14帧/s。
在本文基础上可开展以下研究:1)对卷积神经网络结构进行改造,提升图像深度特征提取的实时性;2)在悬挂系统与车辆底盘、非悬挂质量的连接处分别设置低量程加速度计、高量程加速度计,提高系统灵敏度和动态响应,进而提高道路类型识别的准确性;3)将道路类型识别应用于无人履带车辆悬架控制、换挡决策、路径规划等任务,提升车辆性能;4)深入研究图像深度特征与垂向加速度统计特征之间的互补关系;5)在多处设置加速度计的基础上,分析各处振动信号的特点,提高基于振动的道路类型识别精度,并实现道路不平度等级的辨识。