下肢外骨骼运动学与动力学研究综述
2023-05-31何育民郭思宇严伟奇
何育民,骆 婷,郭思宇,周 晶,罗 阳,严伟奇
(西安建筑科技大学 机电工程学院, 西安 710055)
0 引言
外骨骼作为一种并联穿戴于人体外侧的机械系统,主要用于中风患者步态康复训练、帮助截瘫患者行走以及增强人体负重能力等领域[1-2]。外骨骼的研究还涉及了机器人、机电工程、仿生学、生物工程和力学等多个领域,具有鲜明的学科交叉特征,已成为机器人、机电工程、仿生学、生物工程和力学等学科领域中一个新的研究热点[3-5]。
外骨骼根据其结构形态的不同,可分为全身外骨骼、上肢外骨骼、下肢外骨骼以及各类关节矫正或恢复性训练的关节外骨骼[6]。下肢外骨骼是一种以人为主、机械为辅的人机一体化可穿戴设备,它可为人体行走提供关节助力,其特点在于引入了人的智能决策,同时放大人体关节运动机能,是应用最广泛的一种外骨骼。下肢外骨骼运动学与动力学的研究是对其进行结构设计、意图识别、控制策略、助力评估等的理论基础,因此,对下肢外骨骼开展运动学与动力学研究具有非常重要的意义。本文对下肢外骨骼运动学与动力学的研究现状和发展进行了阐述,分析了当前研究中存在的难点与问题,讨论了下肢外骨骼运动学与动力学发展趋势。
1 下肢外骨骼的构型
下肢外骨骼的构型是进行运动学、动力学的研究基础,不同构型的外骨骼具有不同的运动学和动力学特性。根据构型,下肢外骨骼可分为拟人化外骨骼和人体异构型结构。
1.1 拟人化结构
1.1.1整体式外骨骼
伯克利大学于2006年推出了第一代单兵助力外骨骼样机“BLEEX”[7],如图1(a)所示,仿照人体结构及自由度设计机械系统,双下肢腿部具有7DOF,其中髋关节3DOF,膝关节1DOF,踝关节3DOF,另外在腰带中部增加1DOF来调整人体两下肢运动的协调。BLEEX的设计为后续的外骨骼的拟人化设计奠定了基础,现在的下肢外骨骼多采用类似的拟人化结构,例如,清华大学关鑫宇团队[8],哈尔滨工业大学崔谨想团队[9]等。但是刚性的外骨骼结构很难达到较高的人机协同性,2015年,浙江大学设计了一种具有柔性关节的下肢外骨骼机器人LEE用于重力支撑[10],如图1(b)所示,在髋关节处添加转矩弹簧,膝关节处添加柔性关节,踝关节的跖屈、背屈通过刚性弹簧进行助力缓冲。
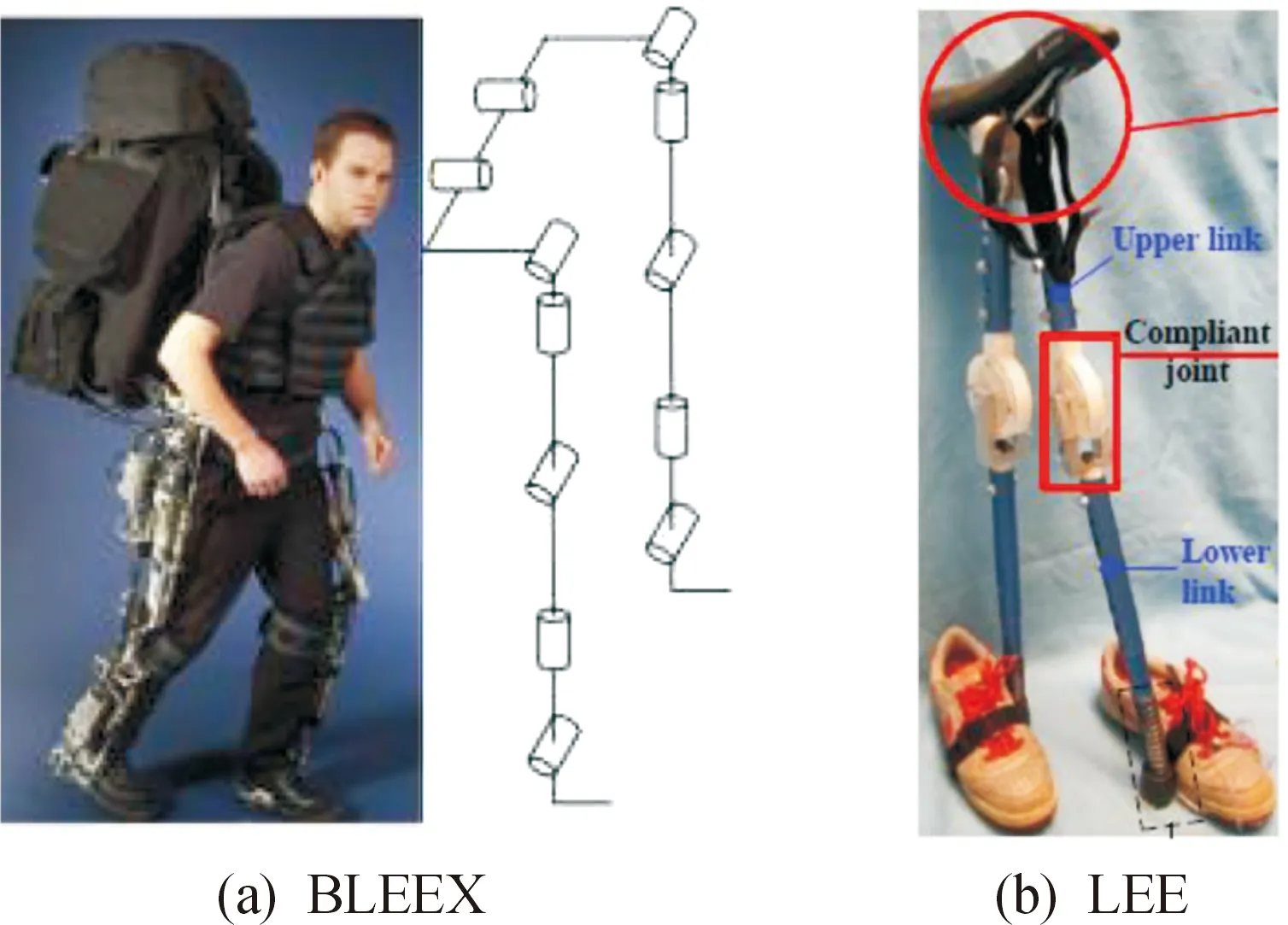
图1 整体式下肢外骨骼
1.1.2关节外骨骼
相比于整体式外骨骼,关节外骨骼体积更小、结构更轻且针对性较强。2016年,清华大学设计了一款无动力储能式截瘫助行外骨骼ES-EXO[11],如图2(a)所示,储能机构附在两侧髋部,由2条平行放置的不同刚度系数的储能弹簧组成。美国卡内基梅隆大学Collins等[12]于2015年设计了一种采用拉伸弹簧和离合器作为能量储存释放装置的踝关节外骨骼UE,如图2(b)所示。渥太华大学S Pardoel等[13]于2019年对这种装置进行了改进,把离合器从小腿位置安装在踝关节处,如图2(c)所示。2016年Erdogan等[14]设计了一种新型拟人化结构,如图2(d)所示,包括3RPS和3RUS等2个结构的踝关节外骨骼ASSISTON-ANKLE,能够自适应匹配人体关节,满足穿戴者不同的活动需求。2019年,华南理工大学设计了一款用于行走辅助的柔性仿生外骨骼机器人UFLLE[15],如图2(e)所示,装置主要包括髋部支撑辅助机构和2个膝关节辅助机构,两者通过非弹性线缆相连。2020年,北京航空航天大学设计了一款髋-膝单侧下肢外骨骼机器人PAFE原机[16],如图2(f)所示,内置一定预紧力的拉伸弹簧和旋转齿轮结构,对穿戴者进行重力补偿。

图2 下肢关节外骨骼
1.2 人体异构型结构
大多数研究人员选择设计与人类相似的外骨骼结构,但也存在一些人体异构型的结构设计。上海交通大学的高峰老师团队,设计了一种剪刀型腿部结构[17],如图3所示。2015年,南京理工大学徐诚老师团队,打破了以往膝关节都被简化为旋转副的观念,设计了一种平动膝关节的外骨骼结构[18]。

图3 剪刀型下肢外骨骼示意图
2 运动学
下肢外骨骼运动学问题的求解,对于下肢外骨骼各杆件的运动控制及其动力学分析都是非常重要的。在研究下肢外骨骼各关节角度和末端杆件之间的位置与方向的关系时,可以将其运动学问题分为正运动学和逆运动学。如图4所示,下肢外骨骼的正运动学问题是已知关节角度和各杆件参数求解末端杆件的位姿,其正解是唯一解,而逆运动学问题是已知末端杆件位姿求解各关节角度,常常存在有解、无解和多解的情况。其特点和应用归纳如表1所示。

图4 下肢外骨骼正/逆运动学关系图
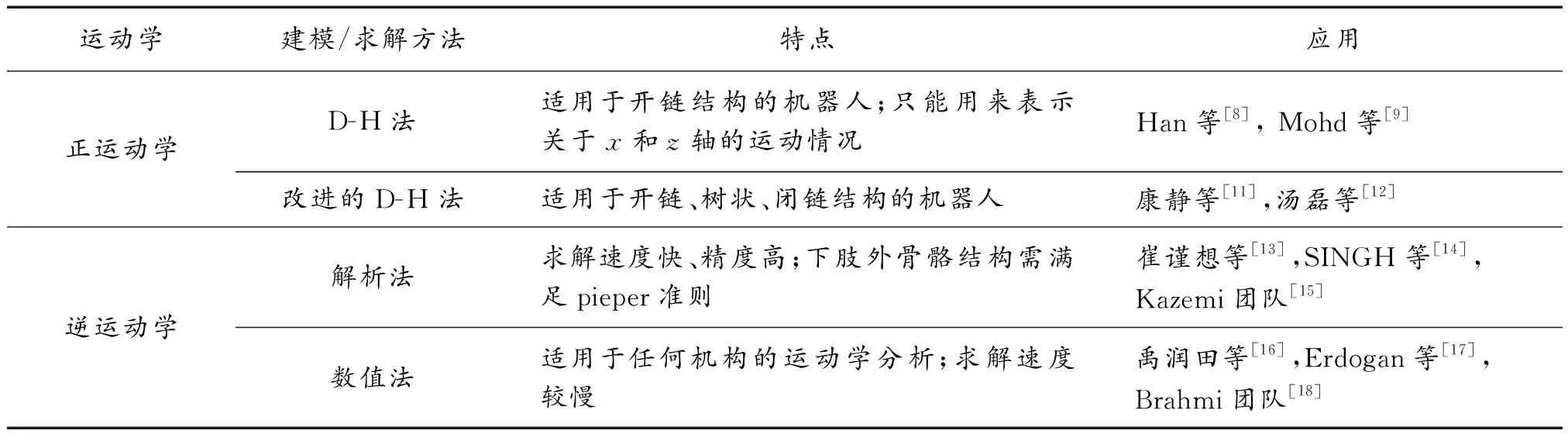
表1 下肢外骨骼运动学研究方法特点与应用
2.1 正运动学
Denavit等[19]在1955年提出的D-H法是目前最常用的下肢外骨骼正运动学建模方法。2008年Han等[20]使用D-H法列出下肢外骨骼正运动学方程,在Pro/E、Adams、Simulink联合仿真中得到其3个关节角度曲线。2016年Mohd等[21]以髋关节为其参考坐标系原点,将3自由度下肢外骨骼简化为三杆机构,采用D-H法建模,如图5(a)所示,得到外骨骼各杆件位置与姿态表达式等运动学信息。
D-H法只能用来表示关于x和z轴的运动情况,而无法表示任何关于y轴运动的情况,适合应用于开链结构的机器人;在机器人相邻两关节轴线平行或接近平行时会出现奇异问题。针对这种情况,一些学者对D-H法进行了改进。

图5 连杆坐标系示意图
Craig[22]在1986年提出了一种改进的D-H法,它和D-H法的不同点在于:改进的D-H法的坐标系是建立在连杆的驱动轴上,D-H法的坐标系是建立在连杆的传动轴上,这种改进的D-H法在分析带有树杈型结构的机器人时可有效避免歧义,在下肢外骨骼上也得到了应用。2018年山东科技大学康静[23]将负重下肢外骨骼等效成7杆机构,运用这种改进的D-H法进行运动学建模,如图5(b)所示,在Matlab和Adams中得到下肢末端轨迹曲线和各关节的角度、角速度、角加速度变化曲线。2020年,电子科技大学汤磊将D-H中建立在非真实物理位置的连杆坐标系变换到真实物理位置,提出了一种便于运动副间隙误差表达的改进的D-H法,并利用这种方法建立了下肢外骨骼的运动学模型[24]。
2.2 逆运动学
机器人逆运动学问题的求解方法主要有解析法和数值法。解析法主要通过消去机构约束方程中的未知参数,使方程降维,最终得到仅含一个未知数的高次方程,包括代数法和几何法。对于由关节和杆件组成的下肢外骨骼而言,可以很容易地找到链式结构中的几何关系,因此几何法在下肢外骨骼逆运动学的解析法中使用范围更广。数值法主要是通过迭代法逐次逼近机器人逆运动学的解,直到满足给定的精度要求。在下肢外骨骼逆运动学的数值法中,有基于牛顿—拉夫逊迭代法的数值法、基于高斯—牛顿迭代法的数值法、基于雅可比矩阵迭代法的数值法等,其中基于雅可比矩阵迭代法的数值法比较常见。
2.2.1解析法
下肢外骨骼结构满足pieper准则,即满足其髋、膝、踝关节轴线平行的条件,因此其逆运动学可以用解析法进行求解。2014年,哈尔滨工业大学崔谨想[9]在对外骨骼机器人进行逆运动学求解时,采用基于微分变换法的代数法得到外骨骼髋、膝关节角度。利用代数知识对下肢外骨骼末端坐标矩阵方程进行等价变换,得到关节角度是一种解析法的求解思路,虽然化简过程较为繁琐,但可以得到所有满足条件的解。

图6 SINGH团队外骨骼及建模示意图
Singh等[25]将CGA正常人体步态数据与CAD模型相结合,将下肢外骨骼划分为4个闭环运动链,建立模型如图6所示,并运用几何法建立其逆运动学方程,得到其各连杆驱动力矩表达式。基于闭环矢量法的几何法是根据下肢外骨骼中组成封闭矢量多边形的各个杆件矢量之和等于零的平衡条件列出闭环矢量方程式,再通过求解方程得到其逆运动学信息的一种方法。它只能在下肢外骨骼结构中存在闭环运动链的情况下使用,但大多数下肢外骨骼结构都属于开式运动链结构,因此该方法具有一定的局限性。Kazemi团队[26]利用基于直角坐标法的几何法表达出的下肢外骨骼的左右腿坐标方程结合各杆件大小求解得到了各关节角度,通过实验得到左腿髋、膝关节驱动电流、理论与实际关节角度等曲线。几何法也可以得到符合非线性运动学方程组的全部解,比较便捷、直观,但必须结合所建立下肢外骨骼的结构特点进行使用,且需要一定的数学变换技巧。有时为了更快捷地找到其解析解,代数法可以和几何法综合运用进行求解。
2.2.2数值法
数值法适用于任何机构的运动学分析,因此下肢外骨骼的逆运动学问题可以通过数值法进行求解。
2015年,北京交通大学禹润田等[27]运用基于牛顿—拉夫逊迭代法的数值法对踝关节康复外骨骼进行位姿反解,分析了踝关节外骨骼康复机构的运动性能并优化了其机构绳索的张力及分布,在Matlab中得到该外骨骼的3种位姿、驱动绳索的长度等信息。
2016年Erdogan等[14]设计的踝关节外骨骼如图2(d)所示,运用基于高斯—牛顿迭代法的数值法列出踝关节助力外骨骼3RPS的运动学方程,得到其踝关节活动范围曲线。基于雅可比矩阵迭代法的数值法也是一种非常重要的迭代数值法,它可用来描述机器人各关节速度和对应末端杆件之间的线速度和角速度的关系,在找到机器人奇点的位姿、分析机器人冗余度、描述加在机器人末端杆件上的力和关节力矩之间的关系及推导机器人动力学算法等方面有着很广泛的应用。2017年Brahmi等[28]利用基于雅可比矩阵迭代法的数值法得到ETS-MARSE机器人各关节速度表达式。
牛顿—拉夫逊、高斯—牛顿、雅可比矩阵等迭代法的收敛与否和初值选择有很大关系,如果选取不当,运用该方法可能收敛到下肢外骨骼的其他位姿。数值法存在适用性广、求解过程无奇异形位等优点,但也存在计算结果精度依赖于初值、只能得到部分解的缺点。
3 动力学
对下肢外骨骼进行动力学研究,首先要建立描述下肢外骨骼运动的力学模型,然后根据力学理论建立其动力学方程,即建立数学模型,再根据研究目的和所要解决的问题,确定求解目标函数,对方程求解,从而得到外骨骼各关节力、关节力矩以及做功与功率等信息。
如图7所示,下肢外骨骼动力学的研究方法可以分为经典力学分析法和肌骨系统模型法。
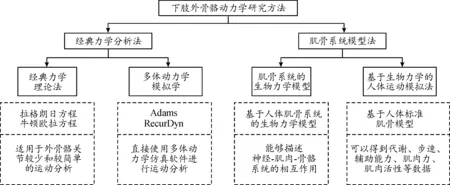
图7 下肢外骨骼动力学研究方法Fig.7 Lower-limb exoskeleton dynamics research methods
3.1 经典力学分析法
3.1.1经典力学理论法
1) 拉格朗日方程。
基于拉格朗日方程的下肢外骨骼动力学建模方法主要有基于第1类拉格朗日方程的动力学建模法和基于完整约束保守系统第2类拉格朗日方程的动力学建模法。
2009年,中国科学技术大学方郁[29]使用第1类拉格朗日方程建立下肢外骨骼单脚支撑相、双脚支撑相、双腿支撑一足冗余相的动力学模型,并在机械摩擦影响下修正模型,在Adams中得到其右腿髋、膝关节的力矩变化曲线。该方法没有使用广义坐标进行建模,系统约束越多,自由度越少,导致系统方程数增多,给方程的解算带来一定的困难。
引入广义坐标到第1类拉格朗日方程中,该方程可以表示成欧拉—拉格朗日方程的形式。Azcaray等[30]运用欧拉—拉格朗日方程得到并联机器人动态行为的平移—旋转方程、平移方程以及旋转方程。
下肢外骨骼系统所处内外力场均为保守力场,其动力学方程也可以由第1类拉格朗日方程推导得到的基于完整约束保守系统的第2类拉格朗日方程进行求解。相对于基于第1类拉格朗日方程的动力学建模法,基于完整约束保守系统第2类拉格朗日方程的动力学建模法,继承了它适用性广以及既可求运动也可求约束力的优点,克服了过多方程组导致难以解算的缺点,在下肢外骨骼的动力学建模中拥有更广的使用范围。
哈尔滨工业大学彭延云[31]将下肢外骨骼简化为7杆机构,运用基于完整约束保守系统第2类拉格朗日方程,分别建立了其单腿支撑、双腿支撑、双腿支撑一腿冗余相的动力学方程,在Matlab和Adams中得到髋、膝关节力矩的理论和实际对比曲线图。这种将下肢外骨骼运动过程划分为单腿支撑、双腿支撑、双腿支撑一腿冗余等3个阶段的划分方式,更贴合人体下肢步态周期的划分方式,在相当程度上减少了外骨骼在运动中与穿戴者发生干涉的概率,很好地保证了穿戴者在步行中的舒适性和协调性。
2) 牛顿—欧拉方程。
牛顿—欧拉方程是一种由牛顿刚体力学知识推导出的机器人逆动力学递推计算公式再归纳得到的动力学模型的建模方法。2017年,清华大学关鑫宇等[8]运用牛顿—欧拉方程建立了具有一个自由度的外骨骼单侧下肢从站立中期到站立后期的逆动力学方程,模型如图8所示,得到髋关节力矩与身高、体重、髋关节角度的关系。

图8 关鑫宇团队外骨骼动力学模型和受力分析示意图
相对于基于拉格朗日方程的动力学建模法,基于牛顿—欧拉方程的动力学建模法在下肢外骨骼动力学建模中具有一些优点。首先,对于拥有不同自由度的下肢外骨骼而言,基于牛顿—欧拉方程的动力学建模法只是着眼于下肢外骨骼每个杆件的运动,得出的动力学模型为联立方程组,计算量与自由度的多少无关;其次,基于牛顿—欧拉方程的动力学建模法满足了对下肢和外骨骼之间的相互作用力分析的需要,这对设计出与人体高度耦合的外骨骼装置存在重要意义。该方法在计算过程中需注意惯性矩阵等的选择和求解问题,存在约束条件增加,导致联立方程组数目增多等缺点,使其在下肢外骨骼动力学建模中拥有相对较小的使用范围[32-33]。
3.1.2多体动力学模拟法
下肢外骨骼系统包括下肢外骨骼和人体下肢。下肢外骨骼由连杆和关节组成,而人体下肢是一个具有有限自由度的典型多链系统,因此可以直接使用多体动力学仿真软件对下肢外骨骼系统进行运动分析与模拟,以得到其运动学与动力学特性。其中使用较多的多体动力学仿真软件有ADAMS、RecurDyn等[34-35]。
3.2 肌骨系统模型法
3.2.1肌骨系统的生物力学模型
下肢外骨骼的肌骨系统模型法是基于人体下肢肌骨生物力学模型的下肢外骨骼系统的运动研究。人体下肢的运动来自于多块肌肉的共同收缩使复合关节产生复杂活动或使关节得到稳定,其动力学决定于个体骨骼肌的形体特性(如人的身高、体重、肢体长度、肌肉—肌腱的形体、肌肉类型及肌肉附着点位置)和肌肉-肌腱单元的生理行为。
从20世纪70年代开始,以南非力学专家HAZTE为代表的一些研究者,考虑了在下肢刚体模型中添加肌肉元素的情况,建立了基于人体肌肉—骨骼生物力学模型,为运动中肌肉活动的研究提供了新的思路。Hazte[36-37]在1976年提出了一个3个自由度2刚体和5块肌肉的人体腿部的肌肉—骨骼生物力学模型,解决了踢脚动作的动力学最优化问题,随后又建立了一个由17段刚体46块肌肉组成的4个自由度的模型模拟了跳远动作。Anerson等[38]建立了10段、54块肌肉、23个自由度的肌肉—骨骼生物力学模型,并在该模型基础上进一步研究了人体的步行优化问题。
后来随着神经系统对运动系统的影响被人们逐步认识与研究,发展出了由人体运动系统和神经系统组成的综合模型。1995年,Taga[39-41]在研究人体步行的问题时,创建了一个包含8段骨骼、20块肌肉和7对神经韵律发生器的神经—肌肉—骨骼生物力学模型,并且进一步提出了跨越障碍物的步行模型,采用步距的事先调整及施加特定的关节力矩的方法,人体运动模型可成功地越过路面障碍物。2001年,Ogihara等[42]建立了基于人体心理学、解剖学的神经—肌肉—骨骼生物力学模型,并利用该模型生成了与真实的人体步行吻合的人体步行模式。
从实际应用角度来看,肌肉与肌肉之间以及与软组织、骨骼、肌腱和其他解剖元素之间互相错综复杂,这就需要合理地建立这些模型的几何位置特征,同时肌肉由中枢神经控制,然而对肌骨模型的具体控制机理的认识还不完全清楚。因此肌骨模型的计算是基于假设进行的,关键是要解决肌肉冗余度的问题,即解决肌肉数目大于所需驱动模型的自由度数目的问题。
随着计算机仿真技术的发展,可以利用弹性肌元、容元、阻尼器等力学元件模拟肌肉系统,以神经系统激活函数模拟神经信号的传递,或用神经系统的中央模式发生器(CPG)、韵律发生器模拟神经的作用原理和对运动的控制,这种方法可以描述神经系统兴奋的传递与反馈、肌肉的收缩及骨骼系统的运动[43]。通过人体肌骨系统模型模拟人体运动,可以结合肌肉软饱和准则、最大最小准则等优化方法和肌肉力—肌电关系解决肌肉冗余度的问题。利用这种方法研究的人体运动更接近人体的真实运动,能够描述神经—肌肉—骨骼系统的相互协调、相互牵制的作用。
3.2.2基于生物力学的人体运动模拟法
基于生物力学的人体运动模拟法,首先通过运动捕捉系统、三维测力平台输出实验测量数据,然后利用人体建模等生物力学软件建立穿戴者的肌骨模型,从而求解穿戴者的下肢各关节受力和肌肉作用力等信息。用这种方法分析下肢外骨骼系统的动力学特性,可以突出人体内部神经信号的传递与反馈、肌肉的舒张和收缩、骨骼的空间运动等规律。
研究人员利用这种方法对穿戴者的代谢能、步速、辅助能力、肌肉力、肌肉活性等方面进行了深入的探索。Nguyen团队[44]在OpenSim中建立了一个具有11个自由度的踝关节外骨骼的肌骨模型,如图9(a)所示,该模型由18个肌肉肌腱单元驱动,研究了步行时,由电机驱动的单侧踝关节外骨骼可帮助健康穿戴者的踝关节能量消耗减少约45%,由电机驱动的双侧踝关节外骨骼可帮助健康穿戴者的踝关节能量消耗减少约52%。对于步速对健康穿戴者的影响方面,Smith团队[45]研究了缓慢步速下(0.2~0.5 m/s)穿戴下肢动力外骨骼志愿者的下肢各关节轨迹运动学与动力学最佳线性回归方程,识别出了33种常见的运动学和动力学步态参数。在下肢外骨骼对肢体残疾患者的辅助能力影响方面,关鑫宇等[11]设计的无动力髋关节助行外骨骼ES-EXO采用双弹簧作为储能元件,如图2(a)所示,在AnyBody中建立的下肢肌骨模型如图9(b)所示,研究了步行时,该外骨骼能使脊髓损伤患者髋关节屈曲力矩降低约37.2%。LERNER团队[46]研究了下肢外骨骼对脑瘫儿童的影响方面,发现了外骨骼可以帮助解决脑瘫患者蹲伏步态。Takahashi团队[47]分析了下肢外骨骼对中风患者下肢运动学与动力学的影响机理,他们通过计算5名中风患者的踝关节、膝关节和髋关节矢状面关节角度、力矩和功率,分析了净代谢率后得到外骨骼可以增强中风患者踝关节力矩。

图9 下肢肌骨模型
通过基于生物力学的人体运动模拟法,分析人体运动、穿戴者的肌骨模型的精确程度直接影响其肌肉力等生物力学数据的正确性,目前,利用人体建模等生物力学仿真方法是通过对人体标准肌骨模型进行修改以适应穿戴者的人体结构来实现的,而个体肌骨模型之间往往存在着显著差异,因此需要建立个性化的模型,以提高分析精度。
4 当前研究存在的难点与问题
对于下肢外骨骼运动学和动力学的研究,采用比较广泛的研究方法主要包括:D-H法、基于几何法的解析法、基于雅可比矩阵迭代法的数值法等运动学方法,基于拉格朗日方程、牛顿—欧拉方程等动力学方法,肌骨系统动力学模型法。由于下肢外骨骼的研究涉及到机械力学、生物力学、人体解剖学和机器人等多门学科,同时影响下肢外骨骼运动学与动力学的因素复杂多变,有关下肢外骨骼运动学与动力学的研究已成为国内外学者关注的热点,但也面临诸多难点与问题。
1) 穿戴外骨骼的人体行走系统,不但涉及到骨骼、肌肉、神经等多个人体系统,而且还包括外骨骼的机械系统,各个系统之间相互影响、相互作用进一步加剧了系统的复杂性。人体的多刚体动力学模型不能很好地反映人体的生物特性,如何将多刚体动力学模型与描述人体骨骼肌肉的生物力学模型有效地结合起来,建立统一的机械—生物力学模型,既能够真实地模拟人体的生物力学环境,也能准确地反映外骨骼人机系统的机械动力学特性,这在揭示下肢外骨骼与下肢或其他系统之间的相互影响机理、提高外骨骼的助力效果、加强穿戴者在步行中的舒适性和协调性等方面是一个有待解决的重要问题。
2) 基于人体建模等生物力学的人体运动模拟法主要是根据个体骨骼长度对标准人体肌肉形态学参数进行线性缩放,从而建立符合穿戴者特征的个性化模型,但人体最优肌纤维长度、肌腱松弛长度与骨骼长度并不呈线性关系[48]。同时在进行EMG等信息的测量时不能保证只有单块肌肉参与测量,也不能有效地区分复杂的肌肉功能群间的协作与对抗作用,而穿戴者肌肉形态学参数的选取,不仅直接影响着其肌骨模型建立的精确程度,也影响着其肌肉力、肌肉活性等生物力学数据计算的准确程度,对下肢外骨骼助行能力的评估效果有很大影响。因此,如何实现人体肌骨系统标准化模型与符合个体肌肉形态学的个性化模型间的有效转换,建立合理、科学的穿戴者肌骨模型及确定相应的模型参数,更准确地模拟穿戴者的下肢运动行为,是今后需要解决的问题。
3) 分析穿戴者下肢运动的动力学特性方法通常有经典力学分析法、肌骨系统模型法等,这些方法忽略了穿戴者身体各个节段组织细节的生物特性,因此可以考虑将肌骨系统模型法与有限元方法结合起来。有限元在器官层次和固体生物力学领域已经应用得比较广泛,而对于利用有限元方法分析穿戴外骨骼的人体下肢生物力学特性在国内外应用很少,应用有限元方法分析人体运动的生物力学特性,能够将传统的运动生物力学从整体层次扩展到组织层次,甚至更深的微观层次和细胞层次[49]。如何利用有限元方法建立基于下肢骨骼、肌肉、韧带等生物和基于外骨骼杆件、关节等机械的融合模型,并有效地处理其边界条件等,使其能够更深层次地揭示穿戴外骨骼的人体运动机理,还需要进一步发展。
4) 人体的运动过程实质上是一种能量的转换过程,在中枢神经系统的支配下,体内储存的化学能转化为机械能和热能。穿戴外骨骼时,不仅人体的能量存在转换过程,外骨骼机械系统与人体之间也存在着能量交互。目前对关节、骨骼、肌肉等人体系统以及外骨骼机械系统的运动学与动力学方面的研究已取得了许多成果,但是如何深度揭示人体运动过程中人体能量的变化、外骨骼机械系统中能量的储存和释放、外骨骼机械系统与人体之间的能量交互规律,是今后需要开展的重要研究内容。
5 结论
下肢外骨骼是机器人、机电工程、仿生学、生物工程和力学等多个学科交叉发展的产物,运动学与动力学是下肢外骨骼研究和开发的重要理论基础。经过不断发展,下肢外骨骼运动学与动力学的研究从起步到逐步发展再到深入,为外骨骼机器人技术的进步做出了很大贡献。本文综述了下肢外骨骼运动学与动力学的研究现状和发展,指出了当前下肢外骨骼运动学与动力学研究中存在的难点与问题,为今后进行深入研究提供了可以借鉴的研究方向。
