基于面向对象逻辑CVA的高分辨影像施工扰动监测
2023-05-31刘宣广汪小钦刘益锋李琳李玉洁
刘宣广,汪小钦,刘益锋,李琳,李玉洁
(福州大学空间数据挖掘与信息共享教育部重点实验室,卫星空间信息技术综合 应用国家地方联合工程研究中心,数字中国研究院(福建),福建 福州 350108)
0 引言
随着城市化进程加速,基础设施建设和资源开发活动数量大幅上升,土地扰动随之加剧.过度土地扰动会造成土地质量下降,进而导致植被减少或丧失,土地裸露面积增加,影响土地覆盖格局变化[1].其中,生产建设项目施工扰动是目前大范围、频繁的扰动类型,建设项目在施工中会对周围地表覆盖情况造成扰动,对生产、生态造成深远影响.施工扰动变化监测是面向特定应用的专题遥感变化检测技术,可有效推动水土保持监督部门提升监督效率、减少人工作业、提高自动化服务水平[2].
施工扰动变化监测目前常用的方法有两种: 一是通过人工解译提取扰动信息;二是基于多时相遥感影像,使用计算机遥感图像处理技术获取扰动信息[3-4].后者具有更高效率,应用更广泛.目前,已有大量使用遥感影像进行变化检测的研究.起初,针对中低分辨率影像的变化检测大多在像素级开展研究,如直接比较法、变化向量分析法等[5].近年来,高分辨率遥感影像(以下简称高分辨影像)迅速发展,其具有更丰富的空间和纹理信息,但由于其存在光谱信息有限、光谱可变性等问题[6],导致使用传统的像素级方法难以取得精确检测结果.随着面向对象图像分析方法的提出以及在高分辨影像变化检测中的成功应用,越来越多研究者聚焦于对象级变化检测[7],如面向对象变化向量分析法(object-oriented tri-temporal logic-verified change vector analysis,OB-CVA)的提出[8-11].OB-CVA通过对比不同时相影像对象间的光谱差值来识别变化程度,可利用较多特征和影像上下文信息.虽然OB-CVA在一定程度上提升了双时相影像变化区域检测上的精度,但应用在多时相变化检测中会存在严重累积误差.为解决该问题,许多学者对此开展研究[12-13].如Du等[14]提出一种三时态逻辑验证变化向量分析方法(tri-temporal logic-verified change vector analysis,TLCVA),该方法通过逻辑推理和判断来识别CVA在多时相变化检测中的错误,有效提升了变化区域检测结果的准确性,但其基于像素的检测结果仍存在较多误检且破碎度高.此外,现有研究在获取语义变化信息时,并未考虑生产建设扰动变化的特殊性,如施工期的生产建设区域的地表通常维持裸漏状态,易误检为未变化区域.
本研究目标是使用多时相高分辨影像进行生产建设项目土地覆盖扰动监测,特别是探索如何降低多时相变化检测的累计误差,进而获取精确的因施工建设造成的扰动变化类别信息.为解决上述问题,构建一种基于OB-TLCVA的施工扰动变化监测方法.首先使用OB-TLCVA获取变化区域,然后结合使用随机森林获取的土地覆盖分类结果,构建施工扰动监测规则,完成精细化的生产建设扰动监测.相比OB-CVA、TLCVA等方法,本研究将面向对象图像分析技术与三时相逻辑分析相结合,可有效降低多时相施工扰动变化监测结果的累积误差,进一步突出高分辨影像的纹理和空间特征,避免独立像元的光谱差异对结果的影响.
1 研究区数据与研究方法
1.1 研究区与研究数据

图1 研究区Fig.1 Study area
研究区位于福建省长汀县北部(见图1红框区域),该区域包含道路、高铁站、稀土工业园等类型的生产建设项目.根据长汀县政府公布的近些年重大生产建设项目信息,获取2016年11月5日、2018年2月15日和2019年9月28日的ZY-3卫星影像.采用Gram-Schmidt方法将影像的全色和多光谱波段融合,对融合后的影像进行地理配准和相对辐射校正,并对叠加的三时相影像使用多分辨率分割算法进行图像分割.
1.2 研究方法
方法流程见图2,包括基于OB-TLCVA的精细变化区域检测和生产建设项目扰动类型识别两部分.

图2 施工扰动变化监测流程图Fig.2 Workflow of the proposed method for building change detection
其中变化区域检测具体又分为两步: 1) 基于三时相高分辨影像,使用OB-CVA获取初始变化区域检测结果;2) 利用三时相逻辑变化分析,在对象级检验初始结果的正确性,并基于随机森林的后验概率校正错误图斑.对于生产建设项目扰动类型识别,首先使用随机森林获取各时相的土地覆盖分类,进而将分类结果与变化区域检测结果结合,通过分类后比较方法获取精细化的生产建设项目施工扰动信息.
1.2.1基于OB-TLCVA的变化区域检测
1) 使用OB-CVA获取初始变化区域检测结果.OB-TLCVA的第一个步骤是构建OB-CVA,获取对象级的初始变化区域检测结果.将2016、2018和2019年影像分别标记为T1、T2、T3,为实现OB-CVA,首先使用多分辨率分割算法对叠加的T1、T2、T3影像分割来获取图像对象,然后采用对象所含像素的各波段灰度均值表示每个对象的特征向量,即
Xit1=[mt11i,…,mt14i]T
(1)
Xit2=[mt21i,…,mt24i]T
(2)
式中:t1、t2分别为两个时期;mt11i,…,mt14i和mt21i,…,mt24i分别是t1、t2时期第i个对象波段的灰度均值.然后计算各个对象的变化向量,即
ΔXi=[Δm1i,…,Δm4i]T=[mt21i-mt11i,…,mt24i-mt14i]T
(3)
式中: Δm1i,…,Δm4i分别为第i个对象各波段灰度均值的差值;ΔXi包含了双时相影像的光谱变化信息.构建了对象的变化向量后计算变化向量的模,获取基于对象的归一化变化矢量强度图,即

(4)
ΔCi越大表明对象i属于变化对象的概率就越大.
最后对获取的对象变化强度图使用Otsu算法[15],以获取不同时间段T12,T23,T13(T12是指2016年至2018年,T23指2018年至2019年,T13指2016年至2019年)的初始变化区域二值图.
2) 基于三时相逻辑循环的错误图斑检测及校正.OB-TLCVA的第二个步骤是使用三时相逻辑循环和随机森林来检测、校正错误图斑,以降低变化区域检测结果的累计误差.对于三时相影像,两两间通过OB-CVA方法获取初步变化结果(CD12、CD23、CD13).结合影像获取的时间顺序和每个对象的两种变化属性(变化和未变化),为每个对象在三时相内构造8种闭合变化循环,循环模式如图3所示,其中3类循环逻辑是错误的(图3中的C6、C7、C8).符合3个错误循环的对象,则可判定其某个双时相的检测结果存在错误.

图3 三时相对象变化的循环模式Fig.3 Cyclic patterns of tri-temporal images change
获取错误图斑后,对错误图斑校正.首先使用训练充分的随机森林模型对所有对象进行二分类,获取变化和未变化的图斑,该步骤可校正部分错误循环.其次,对于随机森林分类之后仍然错误的循环,根据前一步获取的每个对象的后验概率进行校正.考虑到循环中初始检测结果,两个节点同时发生变化检测错误的可能性极低,因此只需调整一个节点的后验概率即可.综合考虑随机森林分类获取的变化和不变化的后验概率,提出不确定性校正规则为

表1 不确定性校正示例
P=1-|Pc-Puc|
(5)
式中:Pc为对象变化的后验概率;Puc为对象未变化的后验概率;P代表不确定性,取值范围为0~1,对不确定性最高的节点进行校正.以研究区某一对象的后验概率为例(见表1),根据不确定性校正规则需要调整T23节点.
1.2.2生产建设项目扰动类型识别
1) 基于随机森林和三时相逻辑循环的土地覆盖分类.使用随机森林分类器将土地覆盖类型分为: 林地、耕地、水体、不透水面、裸地和绿化措施.除了常见的5个土地覆盖类型外,为了更好研究水保措施对生产建设项目水土流失的影响,增加了绿化措施类型(以护坡为主的水土保持措施).
首先选取各类样本及样本重要特征训练随机森林模型,再根据影像人工修正,获取精确的T3时相的对象级土地覆盖分类图.在此基础上,使用已训练的随机森林模型预测其他时相的土地覆盖分类.为提升分类精度,根据三时相逻辑循环规律,在逻辑循环中未变化的对象,可以根据已知的T3参考分类图,将T3的分类结果直接迁移到T1、T2时相的分类图中.比如,图3中的C1循环表示3个时相间均未发生变化,在C2循环内T1与T3时相的土地覆盖类别也应保持一致.
2) 生产建设项目扰动变化规则构建.将分类结果映射到精确的变化区域检测结果上,然后使用分类后变化检测方法,并通过构建规则进行施工监测,包括5个规则.1) 新增: 非裸地(植被、水体、不透水面)→裸地;2) 续建: 裸地→裸地;3) 植被恢复: 非植被(裸地、不透水面、水体)→植被;4) 完工硬化: 植被水体裸地→不透水面;5) 水保措施: 植被水体裸地→绿化措施.
1.2.3精度评价
为验证本方法检测精度,基于长汀县野外实地考察积累的经验和人工目视解译判别研究区影像,标注不同时相间的变化区域参考图和施工扰动变化参考图.对比监测结果和参考变化图获取精度混淆矩阵以计算漏检率、错检率、F1(精确率和召回率的调和平均值,反映模型的稳健性),对本方法进行定量评估;通过生产者精度(PA)、用户精度(UA)和卡帕系数(Kappa)来评定生产建设项目施工扰动变化类型的精度.
2 实验结果与分析
2.1 OB-TLCVA变化检测结果分析
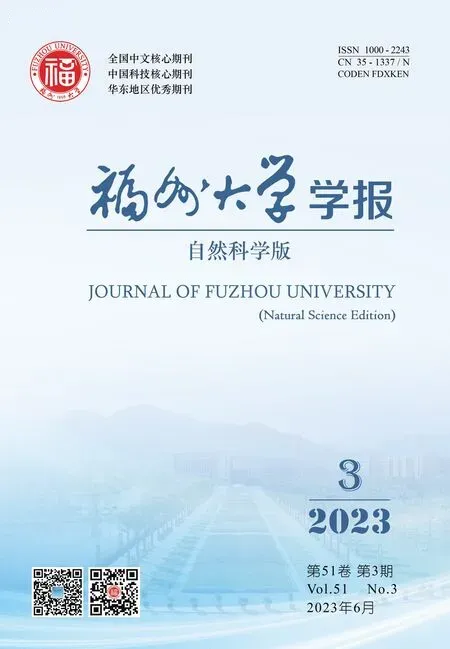
OB-TLCVA的第一个步骤是使用OB-CVA获取初始变化区域检测结果.首先使用eCognition软件中多分辨率分割算法对叠加的三时相ZY-3影像分割,将分割尺度设为80,形状因子参数设为0.2.然后结合分割对象,使用OB-CVA获取对象级归一化变化矢量强度图,再对变化矢量强度图使用Otsu算法,获得初始变化区域检测结果.图4展示了校正前后不同循环模式分布情况.
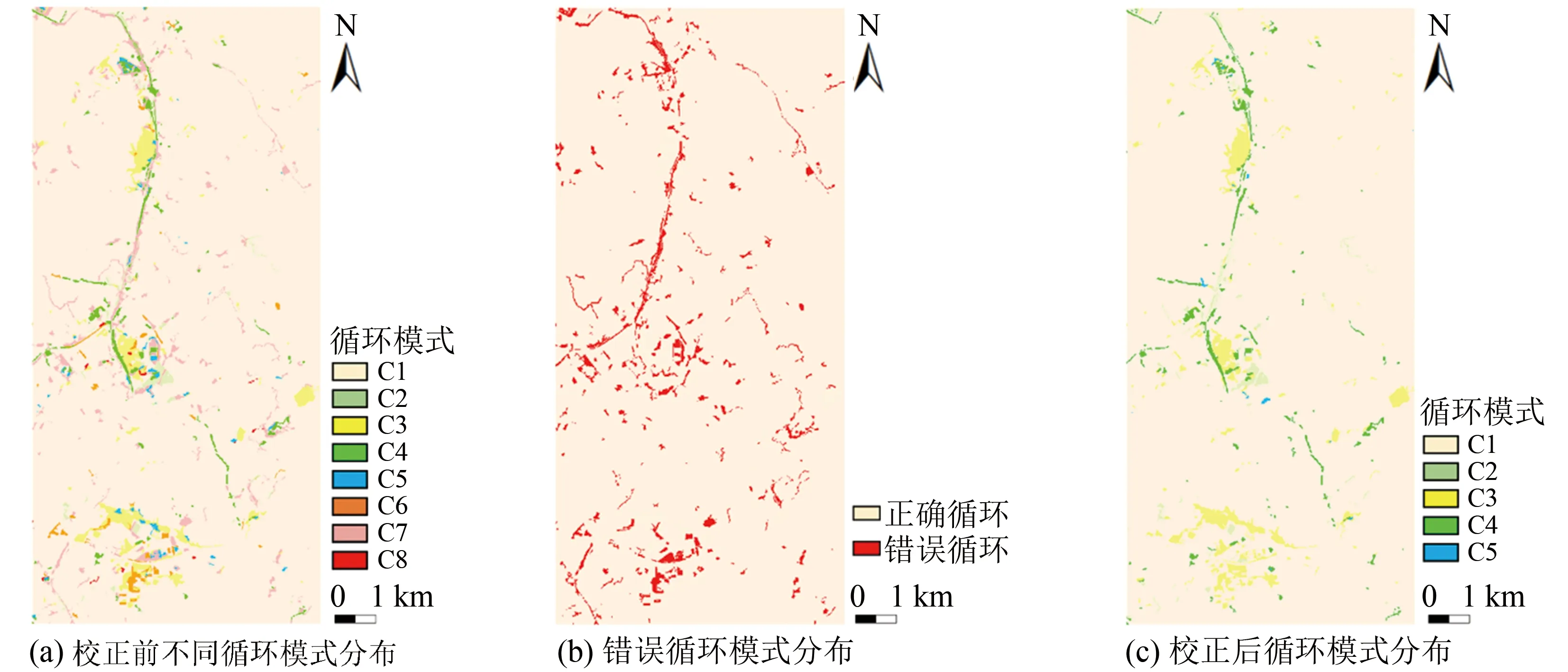
图4 实验区不同循环模式分布Fig.4 Distribution of different circulation patterns in the experimental area
循环模式以C1为主,而在C2~C8循环模式中(见图4(a)),由于多个时相的累积误差,错误循环占据了近50%(见图4(b)).在随机森林模型的训练上,为减少样本库构建成本,制定自动样本选择策略: 将满足在正确循环内更改其变化属性会导致循环逻辑错误条件的对象作为稳定样本,共选择2 100个样本,其中未变化和变化样本比例为5∶2.并使用Gini指数法确定重要性最高的前10个特征(Band2、Band3、NDVI、StdDev3、NDWI、StdDe-v1、Brightness、Band1、Band4、GLCM_contrast),训练随机森林模型,对变化与不变图斑分类.然后根据不确定性校正规则校正仍然错误的循环,校正后的循环分布模式如图4(c)所示,错误循环显著减少.
图5展示了OB-TL和其他方法的变化区域检测结果,OB-TL在视觉上取得了最佳检测效果.表2更进一步证明了OB-TLCVA的检测精度最高,相比OB-CVA,F1平均提升了5.6%.在T12时段,OB-TLCVA检测结果较其他方法检测结果,错检率减少了20%,F1提高到0.7,提升近10%.而在T23时段,OB-TLCVA检测结果的错检率控制在20%以下,同时漏检率减少了4.42%,F1提高到15%.在T13时段,F1达到0.81.
2.2 面向生产建设项目土地覆盖层面变化结果分析
结合OB-TLCVA获取的变化区域和土地覆盖分类结果,通过分类后比较获取了三时相间施工扰动结果(见图6).将变化结果与参考图通过混淆矩阵进行精度验证,获取了T12,T23,T13的施工变化监测图中各变化类别的UA值和PA值.表3为各时段施工变化类型检测结果的精度评价,由表3可知,T12,T23,T13的施工扰动监测结果各类别的UA值均在73%之上,总体精度分别为96.62%、94.90%、94.73%,Kappa系数接近0.9.新增、续建和水保措施的平均UA值分别为88.0%、92.0%、79.5%,平均PA值分别为80.1%、92.5%、78.7%.

表3 各时段施工变化类型精度评价表
对T12和T23时段的各施工变化类型的像元个数进行统计,统计结果如图7所示.自2016-2019年,研究区施工扰动变化以新增施工面积为主,占总变化面积近41%.生产建设项目的完工硬化面积和续建面积呈下降趋势,完工硬化面积下降28.2%;而新增施工面积、水保措施和植被恢复面积呈逐年上升趋势,水保措施面积增加近135%,植被恢复面积增加233.3%.
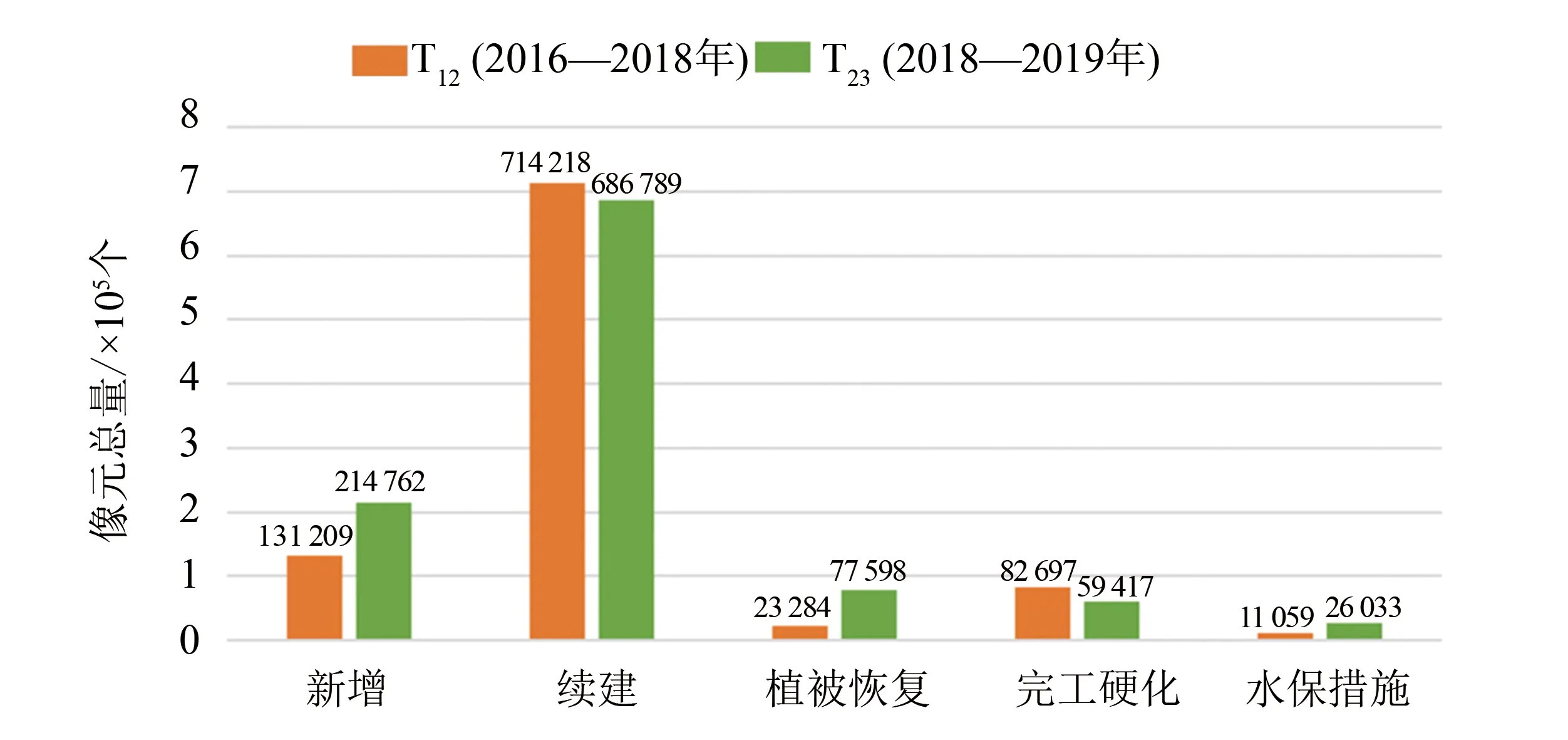
图7 2016—2019年各类型变化统计图Fig.7 Statistics change by type in 2016 to 2019
2.3 讨论
本研究提出基于OB-TLCVA的变化检测方法,在OB-CVA中引入三时相逻辑循环检验,并通过不确定性规则校正错误检测结果,有效提升了变化检测精度.在OB-TLCVA的变化检测结果中,错误图斑显著减少,且对正确图斑无影响,不会增加漏提.但由于不同时相影像间的季节差异,且变化类型较多,即使经过预处理和逻辑校正,依旧存在错检漏检现象.图8展示了不同时相间主要的误差分布细节.由图8可知,主要错检是因裸地在施工过程中地表属性未发生变化,但光谱纹理发生变化,而造成同物异谱现象(T12).此外,还有一些施工区域生长的荒草枯萎后易与周边的暗色的裸土混淆(T23).漏检主要存在于道路施工,一方面是由于道路施工结束后两侧护坡及中间绿化带植被恢复,另一方面是道路的柏油路面光谱反射亮度较低,易与周边植被混淆,整体与施工前较为相似.
图8 不同时相间主要的误差分布和细节呈现Fig.8 Major error distribution and detail presentation in tri-temporal images
在识别生产建设项目扰动类型上,本方法取得了较高的扰动类型识别精度,特别是新增、续建和水保措施.新增、续建和水保措施是实际生产建设项目扰动监测的关键扰动类别,保证了本方法的实用性.但由于在施工期间扰动的裸地容易与不透水面混淆、水保措施易与植被区域混淆,导致基于规则的完工硬化和植被恢复变化类型在检测过程中,二者精度较其他类别低,平均UA值分别为79.0%、85.4%,平均PA值分别为62.0%、67.7%.
造成变化区域漏检误检以及部分扰动类别识别精度较低的根本原因是: 高分辨影像具有较高的类内变化和较低的类间变化.通过结合中等分辨率遥感影像的多个波段信息,以弥补高分辨影像的光谱有限性和易变性缺陷.增加类间差异,减少类内差异,是提升完工硬化和植被恢复识别精度的有效途径,也是下一步的研究重点.
此外,本研究通过两个步骤来实现精细化扰动变化类别检测: 1)获取精确的变化区域检测结果;2)获取各时相土地覆盖分类,并将其与变化区域结果结合.这是为了进行有效的三时相逻辑循环检验及错误图斑校正,若先进行分类后变化检测,再进行逻辑检验,循环模式数量会成指数增加,难以实现错误图斑的识别和校正.另外,考虑施工扰动变化监测的特殊性,如果在对象级变化区域检测结果上直接使用分类后变化检测,这会造成变化类型的严重错检,尤其是续建工程区域.
3 结语
1) 本研究提出的OB-TLCVA方法较Pix-CVA和OB-CVA的漏检率、错检率显著降低,F1分数最高可提升0.12,证明了加入面向对象图像分析技术以及三时相逻辑检测的OB-TLCVA方法,可有效提升高分辨影像变化检测的精确度和适用性.
2) 在OB-TLCVA获取的精细变化区域的基础上进行施工扰动类型识别,三个时相的施工扰动类型变化中,新增、续建和水保措施的监测结果准确度较高.其中续建的平均生产者精度可达92.5%,新增、水保措施类型的生产者精度最高分别为90.21%、81.49%.证明OB-TLCVA为实现精细的施工扰动类型识别提供了数据基础.
3) 自2016—2019年,研究区内新增施工、水土保持和植被恢复面积呈增长趋势,而完工硬化面积呈减少趋势.
以上结论表明本方法可以实现高分辨影像的精细化施工扰动监测,在生产建设项目规划和水土保持治理等实际应用中具有较大的应用潜力.