坡面环境四足机器人对角小跑步态稳定性分析
2023-05-30展振龙杨杰胡继港韩超祝晓轩张斌
展振龙 杨杰 胡继港 韩超 祝晓轩 张斌

摘要:针对四足机器人在坡面行走过程中,机体质心在支撑面上的投影远离对角支撑线交点,影响四足机器人行走稳定性的问题,本文主要对坡面环境四足机器人trot步态稳定性进行分析。以Stanford Doggo四足机器人为仿真模型,提出了调整机器人姿态和调整等效腿长参数相结合的方法,使四足机器人质心前移,减小四足机器人的翻滚角和偏航角,提高四足机器人坡面行走的稳定性。采用分段摆线轨迹,对四足机器人足端轨迹进行规划,并通过webots机器人仿真软件,对3种质心调整方法进行仿真实验。仿真结果表明,3种质心调整方法均可以减小四足机器人坡面行走的翻滚角和偏航角,四足机器人坡面行走的稳定性得到了提高,而且通过对仿真结果进行对比,本文所提的质心调整方法具有显著的优势。该研究具有一定的应用价值。
关键词:四足机器人; 质心调整; trot步态; 未知坡面
中图分类号:TP242.2 文献标识码:A
文章编号:1006-9798(2023)02-0099-06; DOI:10.13306/j.1006-9798.2023.02.014
基金项目:山东省自然科学基金资助项目(ZR2021MF025)
作者简介:展振龙(1997-),男,硕士研究生,主要研究方向为四足机器人运动控制。
通信作者:杨杰(1969-),男,副教授,主要研究方向为图像识别及检测、测控技术与仪器。Email:yangjie@qdu.edu.cn
与两足和六足机器人相比,四足机器人结构相对简单、稳定性相对更高,是足式机器人中最具发展潜力的结构模式[1-4]。坡面作为自然环境中比较常见的一种地形,是足式机器人需要经常应对的挑战环境[5]。与平坦地形相比,四足机器人在坡面行走过程中,通常采用机体与坡面平行的机器人位姿,该位姿会造成机体质心在支撑面上的投影远离对角支撑线交点的问题,而且在trot步态下,绕支撑对角线翻转力矩与质心投影位置远离支撑线的距离成正比,影响四足机器人行走的稳定性[6]。为了提高四足机器人在坡面环境行走的稳定性,应该对四足机器人的质心位置进行规划,减小质心投影到支撑对角线的距离和绕支撑对角线的翻转力矩,提高机器人坡面行走的稳定性。王立鹏等人[7]提出了在次优支撑三角形中求最优稳定点的方法,以提高四足机器人在坡面采用walk步态行进的稳定性,但并没有对tort步态进行研究;马宗利等人[8-9]提出调整机器人小腿长度,实现了液压传动机器人坡面稳定行走,这种方法只适用于腿长可改变的液压传动机器人;魏扬帆等人[10]通过优化中央模式发生器[11](central pattern generators,CPG)反馈参数调整机体姿态,提高了机器人的稳定性;梁启星等人[12]提出了一种“虚拟斜坡”方法,实现了机器人姿态实时调整。因此,针对斜坡环境四足机器人质心在支撑面上投影远离对角支撑线,造成机器人坡面行走稳定性下降的问题,本文通过质心调整方法,提高了四足机器人tort步态行走的稳定性,与多种质心调整方法的优缺点相比,调整机器人姿态[13]和等效腿长参数相结合的方法具有显著的优势。同时,采用分段摆线轨迹[14]的方法进行足端轨迹规划[15-16],在坡面行走中,减小了四足机器人的翻滚角和偏航角,提高了四足机器人坡面行走的稳定性。该研究具有一定的创新性。
1 四足机器人模型
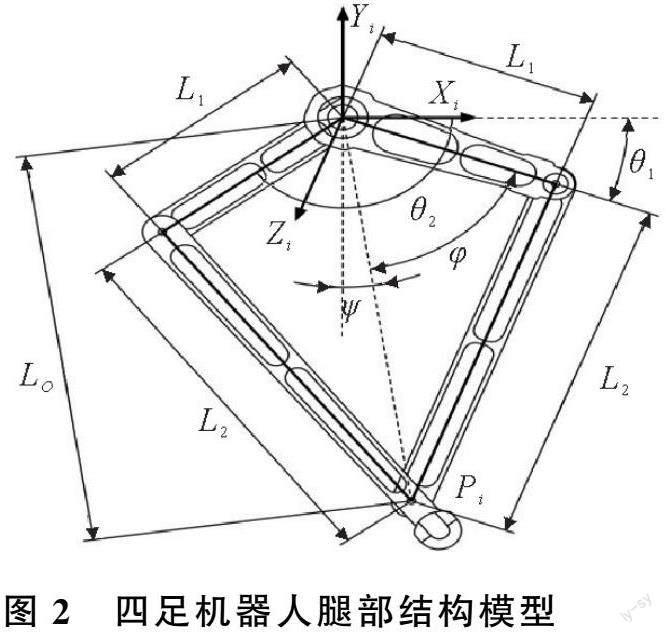
本文以Stanford Doggo[17]四足机器人为仿真机器人模型,Stanford Doggo机器人仿真模型如图1所示。机器人腿部结构为八自由度并联腿结构,每条腿具有两个自由度,该腿部结构承载能力强,控制精度高。四足机器人腿部结构模型如图2所示。
图2中,在机器人髋关节处建立坐标系{Hi}(i=1,2,3,4,分别对应机器人LF,RF,LH,RH四条腿),坐标系坐标原点为Oi,坐标轴Xi指向机器人前进方向,坐标轴Yi竖直向上,坐标轴Zi由右手定则确定。并联腿由2条大腿和2条小腿组成,大腿长度为L1,小腿长度为L2,从髋关节Oi到两条小腿交点Pi的长度为机器人并联腿的有效腿长L0。两条大腿与Xi正向的夹角是θ1和θ2,等效腿长与机器人坐标轴Yi负向的夹角为Ψ,等效腿长与2条大腿的夹角为φ。
2 质心调整方法
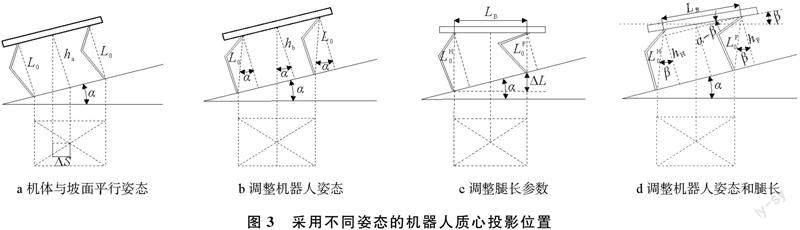
坡面地形是典型的非平坦地形,四足机器人在坡面环境行进过程中,采用不同姿态的机器人质心投影位置如图3所示。
由图3a可以看出,与平坦地形相比,机器人的稳定裕度减小,由于机器人质量主要集中在机体上,可以忽略腿部质量,假设机器人质心位置与机器人机体坐标原点重合,根据零力矩点(zero moment point,ZMP)稳定性判据[18-19],质心投影点与支撑交点的距离为
式中,α为坡面角度;ha为质心到坡面距离。
四足机器人采用trot步态在坡面环境行进时,处于支撑相的2条腿在水平投影面上形成支撑对角线,机体质心在重力作用下产生绕支撑线的翻转力矩,翻转力矩会对机器人在坡面行走的稳定性产生负面影响,造成机器人的翻转角和偏航角增大,出现打滑和后腿拖地的问题。为了解决上述问题,可以采用调整机器人质心位置的方法,提高机器人的稳定性。
由图3b可以看出,通过调整机器人姿态方法,四足机器人机身与坡面平行,四足机器人等效腿长长度L0不变,通过调整机器人足端位置,使机器人机体质心向前和向下移动,调整后的机器人质心支撑面投影接近2条支撑线交点,质心位置的变化量为
式中,L0为等效腿长;α为机体垂线夹角。机体到坡面高度为
由图3c可以看出,调整等效腿长参数,四足机器人后腿等效腿长保持不变,减小前腿等效腿长,调整机器人机身与水平面保持平行,机器人等效腿长垂直于水平面。前腿等效腿长的减少量与坡面角度的關系为
式中,ΔL为前腿等效腿长的减少量;LF0和LH0分别为前腿和后腿的等效腿长。
由图3b还可以看出,虽然运动空间没有受到限制,但对于机器人稳定性的改善效果不明显。由图3c还可以看出,虽然调整后机器人支撑面面积大,稳定裕度高,但是致机器人前腿运动空间受到限制。由图3d可以看出,通过结合两种方法的优点,调整机器人姿态和调整等效腿长参数相结合的方法具有显著的优势,β为机器人与水平面夹角和机器人等效腿长调整角度,取值范围为0≤β≤α,前腿和后腿的等效腿长分别为LF0和LH0,建立关系式为
3 足端轨迹规划
分段摆线轨迹对足端轨迹规划的方法[20],能够减小坡面环境足端受到的冲击力,提高机器人在坡面环境运动的稳定性[20],但足端规划方法只对机器人机体在平行于坡面的情况下进行研究,忽略了坡面环境机器人受到绕支撑对角线翻转力矩的影响。为了进一步提高机器人的稳定性,结合质心调整方法,对分段摆线轨迹方法进行改进,分段摆线轨迹图如图4所示。
分段摆线轨迹为
式中,h为足端到机器人髋关节的距离;μ=0.25为摆动相、上坡面支撑相、水平支撑相和下坡面支撑相在周期T中的占比;hu为摆动相足端在Y方向的移动距离;hd为支撑相足端在Y方向移动距离;s为机器人迈步总长;sq长度为s的三分之一,是向上坡面支撑相、水平支撑相和向下坡面支撑相在X方向的移动距离。
结合上述提出的质心调整方法,对足端轨迹进行调整。由图3b可知,调整后的前后腿姿态变化相同,足端轨迹调整为
由图3c所示的质心调整方法,前腿的等效腿长减小,后腿参数未变,足端轨迹调整为
图3d所示方法,对机器人的姿态和机器人的腿长参数进行调整,机器人前、后腿的足端轨迹需要做出不同的调整。其中,前腿和后腿足端轨迹分别调整为
4 仿真验证
采用webots机器人仿真软件,对3种质心调整方法进行仿真实验。坡面角为15°,机器人采用trot步态,机器人质心调整翻滚角变化如图5所示,机器人质心调整偏航角变化如图6所示。图5和图6中,红色曲线为调整前的方法,蓝色曲线为调整后的方法。由图5a和图6a可知,当机器人采用图3b所示质心调整方法时,调整后的机器人翻滚角减小,但是偏航角变大;由图5b和图6b可知,当机器人采用图3b所示质心调整方法时,调整后的机器人翻滚角减小,偏航角波动情况有所改善;由图5c和图6c可知,当机器人采用图3d所示质心调整方法时,调整后的机器人翻滚角和偏航角均减小,其中偏航角改善最明显。
总结上述仿真结果,3种方法均可以减小机器人翻滚角,从而改善机器人坡面行走的稳定性,但方法1使机器人的偏航角变大,影响机器人向前行进;方法2机器人前腿运动空间受到限制;方法3可以减小机器人翻滚角和偏航角,尤其对机器人偏航问题改善明显。
采用不同质心调整方法,机器人翻滚角方差对比如图7所示,机器人偏航角方差对比如图8所示。由图7和图8可以看出,本文所提方法3,综合改善了机器人的稳定性,具有一定的应用价值。
当β取不同值时,机器人翻滚角方差变化如图9所示,机器人偏航角方差变化如图10所示。由图9和图10可以看出,随着β的增大,机器人的翻滚角方差逐渐增大,偏航角方差先减小后增大;当β=5°时,翻滚角方差最小;当β=10°时,偏航角方差最小。为了提高斜坡环境下机器人trot步态稳定性,应选择翻滚角方差和偏航角方差均相对较小的β角度,所以当坡面角度为15°时,应选择β=6°。
5 结束语
为了提高斜坡环境下机器人trot步态稳定性,针对机器人质心在支撑面投影位置对稳定性的影响,提出了通过调整机器人姿态的同时,调整机器人等效腿长参数的方法,提高机器人稳定性。與前人方法相比,该方法不局限于机器人结构,液压传动与电机传动机器人均可适用。仿真实验结果表明,调整质心位置有利于提高机器人坡面行走的稳定性,与其他质心调整方法相比,本文所提方法对于减小机器人行进的翻滚角与偏航角具有显著优势,与调整前相比,调整后翻滚角方差和偏航角方差分别减小了19.64%和74%。本文主要对坡面15°角度进行了仿真,为了更进一步验证该方法,未来的工作将在多角度坡面上采用实物样机进行运动。
参考文献:
[1] 易静,李光,薛晨慷,等. 四足机器人Trot步态偏航分析及其控制[J]. 机械与电子,2022,40(3):58-64.
[2] LEI J T,REN M M. Dynamic stability of quadruped robot walking on slope with trot gait[J]. High Technology Letters,2016,22(1):1-9.
[3] 史亚鹏. 基于运动规划与足地交互的液压四足机器人力矩控制研究[D]. 哈尔滨:哈尔滨工业大学,2021.
[4] 王银浩,颉潭成,徐彦伟,等. 四足机器人侧摆型trot步态的运动学分析及仿真研究[J]. 现代制造工程,2022(5):24-29.
[5] 常青,韩宝玲,乔志霞,等. 四足机器人斜坡运动的自适应控制算法[J]. 北京理工大学学报,2019,39(9):900-906.
[6] 何冬青,马培荪,曹曦,等. 四足机器人对角小跑起步姿态对稳定步行的影响[J]. 机器人,2004(6):529-532,537.
[7] 王立鹏,王军政,赵江波,等. 基于零力矩点的四足机器人非平坦地形下步态规划与控制[J]. 北京理工大学报,2015,35(6):601-606.
[8] 马宗利,张培强,吕荣基,等. 四足机器人坡面行走稳定性分析[J]. 东北大学学报(自然科学版),2018,39(5):673-678.
[9] 马宗利,张培强,吕荣基,等. 四足机器人坡面质心调整方法[J]. 北京理工大学学报,2018,38(5):481-486.
[10] 魏揚帆,周川,郭健,等. 基于CPG的四足机器人坡面稳定行走控制研究[J]. 控制工程,2021,28(6):1055-1060.
[11] SHENG J P,CHEN Y Y,FANG X,et al. Bio-inspired rhythmic locomotion for quadruped robots[J]. IEEE Robotics and Automation Letters,2022,7(3):6782-6789.
[12] 梁启星,李彬,李志,等. 基于模型预测控制的四足机器人斜坡自适应调整算法与实现[J]. 山东大学学报(工学版),2021,51(3):37-44,51.
[13] 赵江波,龚思进,王军政,等. 四足机器人步态参数优化及探索性行走策略[J]. 北京理工大学学报,2022,42(4):407-414.
[14] 柴琦,杨杰. 面向未知地形的四足机器人足端轨迹优化[J]. 青岛大学学报(自然科学版),2022,35(3):51-57.
[15] 黄照翔,颉潭成,徐彦伟,等. 基于Simulink/SimMechanics的四足机器人足端轨迹规划及动态仿真分析[J]. 制造业自动化,2022,44(4):77-82.
[16] 魏顺祥,吴海波,陈久朋,等. 四足机器人足端复合轨迹的优化与性能分析[J]. 中山大学学报(自然科学版),2022,61(4):142-150.
[17] NATHAN K,AARON S,NATALIE F,et al. Stanford Doggo:An open-source,quasi-direct-drive quadruped[C]∥International Conference on Robotics and Automation. Montreal,French:IEEE,2019:6309-6315.
[18] 赵祥凯. 复杂地形下基于CPG的四足机器人运动控制研究[D]. 重庆:重庆大学,2020.
[19] 王清峰. 一种十一关节仿生四足机器人的研究[D]. 天津:天津大学,2018.
[20] KALAKRISHNAN M,BUCHLI J,PASTOR P,et al. Fast,robust quadruped locomotion over challenging terrain[C]∥International Conference on Robotics and Automation. Anchorage,AK,USA:IEEE,2010:2665-2670.
Abstract:For the problem that the projection of the body′s mass center of robot on the supporting surface is far away from the intersection of diagonal support lines during the quadruped robot walking on the slope,which affects the trotting stability of the quadruped robot,this paper mainly analyzes the trot gait stability of quadruped robot in the slope. Taking Stanford Doggo quadruped robot as simulation model,a method combining adjust robot posture and adjust leg equivalent length is proposed to move the body′s mass center of robot forward,reduce robot′s roll angles and yaw angles and improve the stability of the quadruped robot trotting on slope. At the same time,the piecewise cycloid trajectory is used to plan the foot trajectory of the quadruped robot,and the simulation experiment of three methods of the center mass of robot adjustment is carried out by webots. The simulation results show that three methods can reduce the roll angles and yaw angles of quadruped robot trotting on the slope,and the stability of quadruped robot trotting on the slope is improved. Moreover,by comparing the simulation results,the centroid adjustment method proposed in this paper has significant advantages. This research has certain application value.
Key words:quadruped robot; mass center adjustment; trot gait; unknown slope