基于缩尺试验的联络通道机械法施工监测研究
2023-05-26郑诗怡郑荣跃杨佳栋邓岳保朱瑶宏
郑诗怡, 郑荣跃, 杨佳栋, 邓岳保, 朱瑶宏
基于缩尺试验的联络通道机械法施工监测研究
郑诗怡, 郑荣跃*, 杨佳栋, 邓岳保, 朱瑶宏
(宁波大学 滨海城市轨道交通协同创新中心, 浙江 宁波 315211)
机械法联络通道作为一种新兴的地下结构施工方法, 开展监测技术研究对其安全施工具有重要的意义. 针对目前工程中监测目标集成度不够、信息化程度不高的问题, 以宁波地铁机械法联络通道项目为基础, 提出了一套完整的联络通道施工安全在线智能监测系统. 该系统分为应用层、传输层、感知层三个部分, 并且具有采样、存储、传输、数据处理和预警功能. 通过开展缩尺模型试验, 测试了联络通道掘进过程中的变形及应力发展规律, 并检验了监测系统的可靠性. 试验结果表明该系统可实现实时监测、无线传输等目标, 满足实际工程的监测需求, 可进一步推广至实际工程.
联络通道; 机械法施工; 无线监测; 缩尺模型试验
地铁作为城市轨道交通的重要组成部分, 以安全、绿色、便捷等优势, 成为了缓解交通压力、减少出行时间的重要交通工具. 统计结果显示, 截至到2021年底, 全球共有79个国家和地区的541座城市开通了城市轨道交通, 运营里程达到了36854.20km[1]. 地铁联络通道作为城市轨道交通两条单线区间隧道之间的(长度大于600m)[2]消防安全逃生通道, 是轨道交通工程的重要组成部分. 联络通道机械法施工技术作为一项新型工法, 相关研究正逐步深入, 但其施工监测方法仍处于探索阶段.
在地铁主隧道的施工监测方面, 刘志锋等[3]基于GRP5000移动式三维激光扫描仪对隧道椭圆度进行了监测分析; Che等[4]采用高精度光纤传感技术, 对波纹钢公用工程隧道力学性能进行了监测研究; Ye等[5]研究了低频瞬态电磁雷达系统的原理, 并将其应用在地下管道和空洞检测中. 以上研究只在监测技术方面进行改进, 仍要监测人员进入隧道内部进行监测, 存在监测效率不高等问题, 需进行智能化改进.
在现有地下结构的智能监测方面, Javier等[6]针对机器+活动识别和威胁监测两方面, 提出了一种新型的基于光纤的管道完整性威胁预防监测系统; Liu等[7]提出了一种施工声音监测系统, 收集了电锤、切路机、挖掘机破碎锤的施工声以及环境噪声, 以防止施工造成的地下管道损坏; 张利文[8]提出了一种利用倾角传感器监测盾构隧道纵向沉降的新方法, 完成了测量系统的研究设计, 能实现远程监测隧道纵向沉降曲线, 有较高的测量精度, 并且经济成本低; Wang等[9]监测了西安幸福临戴项目地下裂隙活动期的垂直地表沉降、结构应力、裂隙位移和接触压力等地下公用隧道结构的预警指标, 给出了安全控制值和预警标准; 周济兵等[10]提出了一种基于事故情景的标准操作流程体系, 采用管廊状态数据采集、分级分段层次风险评估、基于情景的分段应急检索和多级应急响应, 实现了事前预防、事中快速响应的目标; 肖丽等[11]通过数值模拟和室内试验, 设计了一套基于LES的多功能盾构隧道风险可视化预警试验系统, 该系统可实时监测结构的横向直径收敛变形和管片转角这两项横向变形指标, 并可视化地显示结构在各种指标下的安全等级. 虽然以上研究取得了丰硕成果, 但是依然存在不同监测目标之间的集成度不够等问题.
在机械法联络通道的施工监测方面, 李淑强等[12]以青岛地铁8号线某区间隧道为工程依托, 阐述了机械法联络通道施工质量管理体系, 并开展了现场沉降监测分析; 梅清俊等[13]以宁波地铁3号线某联络通道工程为研究对象, 通过监测分析研究了机械法联络通道T接施工技术对周围地层、主隧道结构等的施工影响; 杨佳栋等[14]基于缩尺模型试验对机械法联络通道T接部位接收端切削洞口附近及主隧道变形、轴力、弯矩等变化规律进行了研究; 胡威等[15]依托杭海城际线余杭高铁站—许村镇站区间隧道机械法联络通道工程, 采用现场实测、理论分析和有限元模拟等方法, 研究了机械法联络通道开挖对T接部位隧道结构及地表变形的影响. 目前对机械法联络通道施工技术的研究多集中于隧道管片结构、隧道对周围环境沉降等方面, 尚未形成一套系统体系来准确测量分析隧道之间、隧道与土之间以及隧道与周围环境之间的影响.
综上所述, 对于机械法联络通道施工中如何集成监测项目, 提高监测精度, 减少人工, 已成为亟待解决的问题. 为此, 本文以宁波地铁机械法联络通道工程为基础, 利用缩尺模型试验, 提出一套完整的机械法联络通道施工安全在线智能监测系统, 并检测该系统的有效性, 为相关施工安全智能监测提供参考.
1 模型试验与监测方案
1.1 试验概况
以宁波轨道交通3号线某区间机械法联络通道为基础, 设计了一套缩尺试验模型, 主要包括模型试验箱、盾构掘进机以及监测系统三部分. 模型试验采用13环主隧道管片拼接, 如图1所示.
模型隧道管片外径为600mm, 内径为520mm. 中间3环为切削环, 管片长为150mm. 中间3环两边各对称布置5环管片, 为标准环, 管片长120mm. 模型试验示意和照片分别如图2和图3所示. 当盾构机对管片进行切削时, 会引起洞口附近的管片产生较大的应力, 严重时可能产生变形、裂缝等, 所以在此范围进行重点监测. 中间5环为主要受影响环, 由于管片为对称布置, 所以试验主要针对中间第5、6、7环的收敛变形情况进行监测. 在前期试验[14]中可以发现切削环上往往受到比较大的剪切力和顶推力, 这两种力会产生较大的振动并使得结构产生倾斜. 因此, 需要在切削环上下布设倾斜监测传感器对管片受力后的旋转情况进行监测; 在洞口处以及其正后方管片上布设加速度监测传感器, 监测盾构机切削过程中管片产生的振动及其耗散情况.
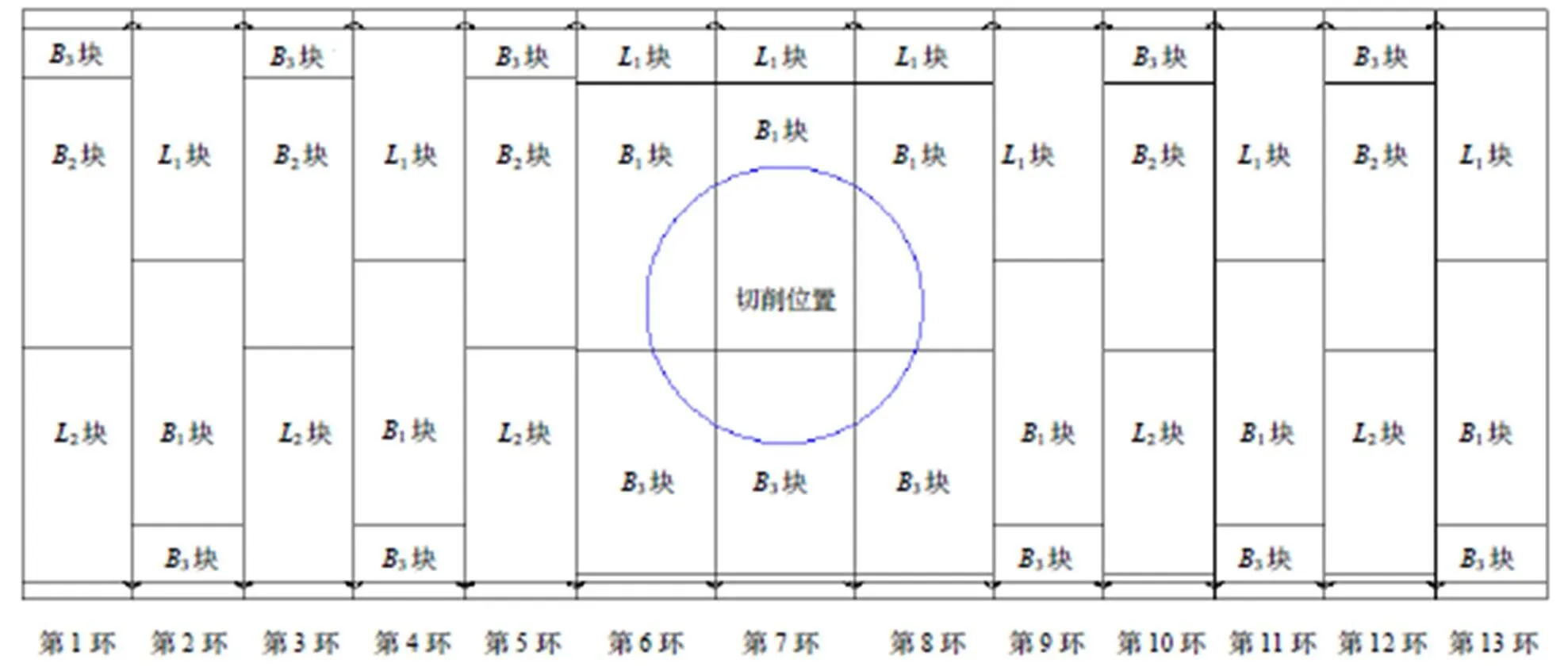
图1 机械法联络通道主隧道示意
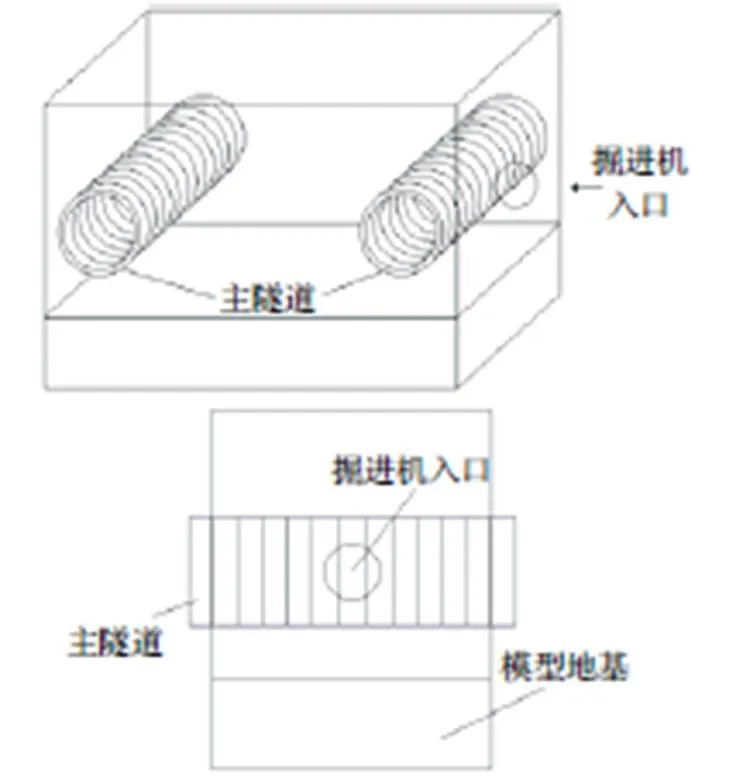
图2 模型试验示意

图3 模型试验照片
1.2 监测方案
监测系统基于无线传输技术原理组建, 分三部分: 感知层、传输层、应用层. 感知层是最基础部分, 用于采集数据, 监测项目有应变监测、土压力监测、位移监测、裂隙监测、孔压监测、振动监测等, 具体监测内容见表1. 传输层主要用于网络传输, 主要仪器为物联网网关. 应用层主要用于数据接收、解析和展示.
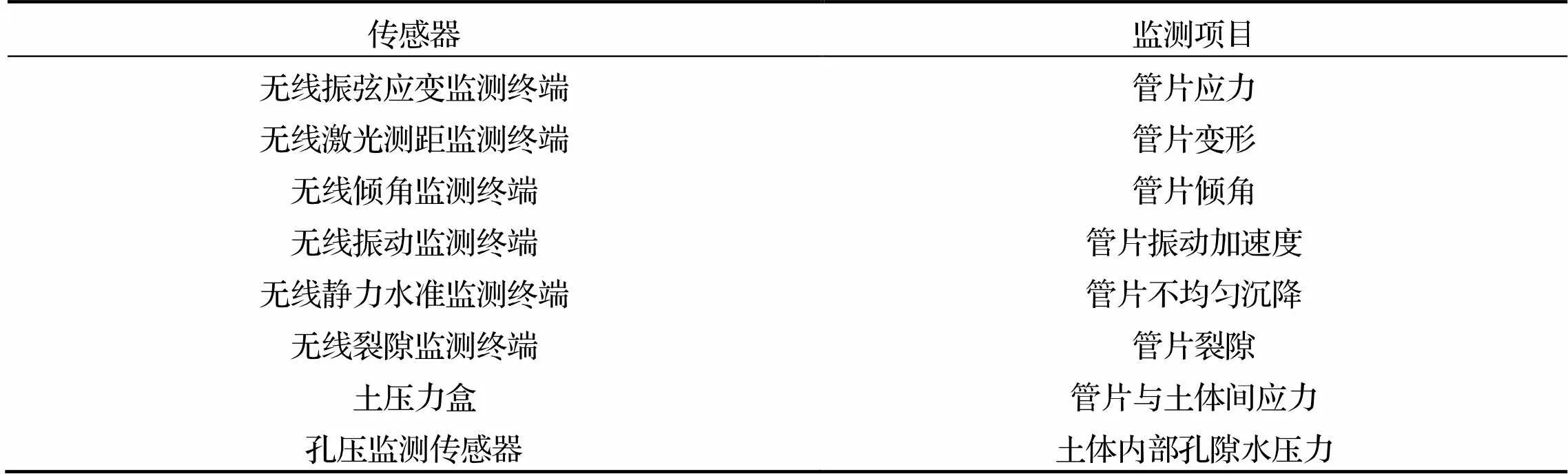
表1 监测内容
系统具有高性能的数据管理、计算能力, 支持随时随地在移动端查看数据. 系统架构如图4所示. 无线传感器终端按照设定的采样时间间隙性工作. 终端数据上传不成功时将缓存采集数据, 待网络恢复后依据代价算法综合评估, 筛选出最合适的设备加入其网络并自动补发, 保证采集数据的完整性. 在接收数据后, 系统首先对数据进行预处理, 将4倍方差作为阈值, 过滤采集过程中由于传感器自身或环境温度、湿度等原因产生的异常数据, 以确保数据的可靠性. 同时系统会对不同采集器采集到的数据进行分类, 自动把数据转换成动态的图形, 通过可视化形式呈现在网页上.

图4 系统架构
系统还配有预警功能, 预警值根据不同部位监测的不同内容有针对性地进行设定. 系统预警等级与监测对象的风险等级相适应, 分为三级, 监测人员可根据不同的等级采取不同的防护措施. 预警值确定方法: 首先通过实际经验或行业规范等获得极限值, 然后将极限值加上一定的安全系数作为预警值[16]. 在监测前人为设定预警值, 平台会自动将数据与预警值进行对比分析. 若采集值超过预警值, 平台将以网页或短信提醒方式发送相应预警等级.
1.3 传感器布设
试验主要对被切削主隧道的受力情况进行监测. 整条管片为拼接而成, 以第7环为中心, 对称布置. 传感器布设主要在第5、6、7环上, 布设情况如图5、6所示. 其中1-1、1-2为应变传感器, 布设在第6、7环管片的150°位置处, 监测切削过程中管片应力应变情况; 2-1、2-2、2-3、2-4为裂隙监测传感器, 2-1、2-2布置在第5环的竖向与横向位置, 监测隧道竖向和横向变形, 2-3、2-4布置在第6、7环和第5、6环管片150°位置的接缝处, 监测切削环之间、标准环与切削环之间的裂隙发展情况; 3-1、3-2为倾角监测传感器, 布置在第7环管片的0°和180°位置处, 监测切削过程中隧道倾斜状况; 4-1、4-2为加速度传感器, 布置在第6环管片的90°和270°位置处, 监测切削管片时产生的加速度.

图5 传感器布设示意

图6 隧道内传感器布设情况
2 试验过程及分析
2.1 试验过程
试验对象主要选取中间第5、6、7环, 其中第5环为标准环, 第6环为半切削环, 第7环为完全切削环. 试验分为四个阶段:第一阶段, 盾构机向前推进至与管片接触; 第二阶段, 盾构机切削管片至管片破洞前; 第三阶段, 管片破洞, 盾构机继续切削至整个刀头完全贯穿管片; 第四阶段, 盾构机继续向前推进直至整个刀盘部位通过管片, 完成切削. 试验总时长371min, 第一阶段持续时间为67min, 其中盾构机向前推进至接触到试验箱持续时间为10min; 第二阶段持续时间为164min; 第三阶段持续时间为130min; 第四阶段持续时间为10min. 图7所示为主隧道破洞阶段盾构机掘进情况.

图7 主隧道破洞阶段
2.2 试验分析
(1)应力
整个切削过程应力变化情况如图8所示, 其中224C(即1-1)布置在第7环上, 224D(即1-2)布置在第6环上. 可以发现图中224C的应力增幅远大于224D, 这是由于试验中盾构机的顶推力主要作用于第6、7、8环上, 而整个隧道并不是一个整体, 是由一环环管片拼接而成, 使得应力向外传播时环间衰减程度较大, 并且环内管片本身也有一定的衰减作用, 导致半切削环上的应力远小于全切削环上的应力. 刀盘表面为弧面并布设有凸起的小刀片, 在刀盘切削时, 完全切削环首先受到顶推力, 待切削至122min, 半切削环开始受到刀盘切削, 此时半切削环上应力产生一个突增.

图8 主隧道管片应力变化曲线
在切削过程中, 应力在第一阶段末(即盾构机刀盘初顶至管片外壁时)、第二阶段和第三阶段产生较明显的增幅, 第四阶段应力呈现平稳发展趋势. 在第一阶段前10min, 盾构机向前推进至接触试验箱, 试验箱内砂土和管片并未受到盾构机的顶推力, 应变可视为0. 当盾构机进入试验箱并在砂土中向前掘进时, 盾构机上的顶推力通过砂土传递到管片, 管片产生第一个突增应力, 为34.41 MPa, 此时管片处于弹性阶段. 随着机器不断向前推进, 刀盘距离管片越来越近, 管片上的应力也缓慢上升. 第二阶段为盾构机切削管片直至破洞. 随着盾构机对管片的持续切削, 混凝土开始出现裂缝, 此时切削环管片处于弹塑性阶段, 盾构机对管片的顶推力保持在一个恒定的状态, 因此管片上的应力呈现一种平稳波动的状态. 在第三阶段, 由于混凝土管片出现破洞, 在破洞周围会产生应力集中现象, 因此应力曲线出现了第二个突增, 应力激增至209.37MPa. 随着破洞面逐渐增大, 应力呈现缓慢增长的趋势. 到第四阶段, 管片被完全钻穿, 盾构机继续向前推进至整个刀头完全穿过洞口, 此时应力不再增长, 呈现一个平稳状态, 应力保持在252MPa左右.
(2)隧道变形
整个切削过程中隧道变形的监测结果如图9所示.

图9 隧道变形曲线
图9(a)为第4环竖向位移变化曲线; 图9(b)为第4环横向位移变化曲线. 第一阶段, 当盾构机进入试验箱内开始向前掘进时, 刀盘会将附近的土体通过内置的绞龙螺旋杆运送至刀盘后部的金属护套内, 隧道管片前部土压力减小, 导致隧道竖向变形减小了8μm, 横向宽度增加了705μm. 但随着盾构机将顶推力通过砂土传递给管片, 管片的变形不再增加, 砂土、隧道之间保持一种平衡状态. 第二阶段, 盾构机顶推力直接作用于隧道管片上, 此时隧道变形恢复到初始状态. 但随着时间的增加, 隧道管壁在切削作用下逐渐变薄, 横向变形逐渐增加直至到达平衡状态. 第三阶段初, 由于切削环管片出现破洞, 应力集中在洞口附近, 因此标准环上受到的顶推力减小, 管片横向变形出现回升状态. 由于砂土间无黏聚力, 导致在第一阶段盾构机挖去较多管片侧面砂土后, 管片竖向土压力大于横向土压力, 竖向变形缩短了34μm. 最终随着管片完全破洞, 管片应力发生重分布, 管片变形再次达到平衡状态.
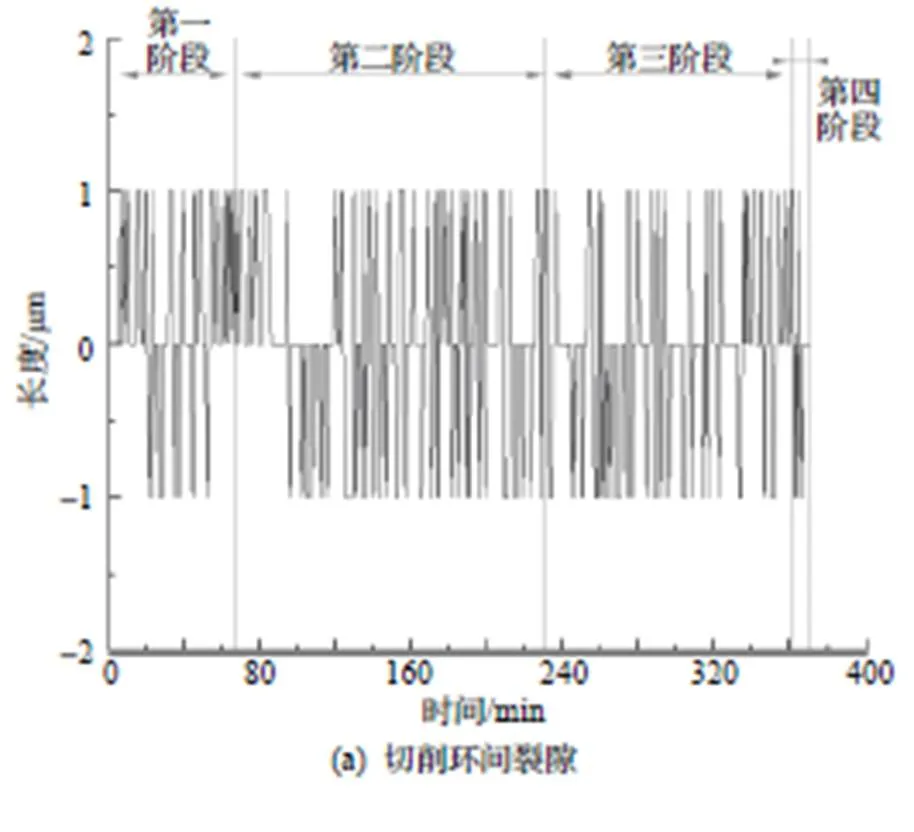
由于隧道由管片拼接而成, 因此需要对环与环之间的裂隙变化情况进行监测. 图10(a)为切削环与切削环之间裂隙的变化情况, 可以发现环间裂隙变化并不明显, 在-1~1μm之间. 这是由于在切削时, 顶推力作用于切削环上, 切削环间受力相差不大, 不会产生较大的裂隙. 图10(b)为切削环与标准环之间裂隙的变化情况, 可以发现裂隙在第一阶段并没有很大的增长, 主要因为盾构机在砂土中掘进, 没有直接接触到管片. 第二阶段, 盾构机开始切削管片后环间裂隙随之缓慢增长, 增长幅度为5μm. 第三阶段, 由于隧道破洞, 环间受到的顶推力减小, 使得隧道裂隙不再增长, 且隧道侧边砂土缺失, 导致隧道竖向和横向土压力不平衡, 标准环与切削环之间被挤紧, 裂隙长度缩短至-2μm. 第四阶段为盾构机结束切削继续向前顶进阶段, 此时盾构机顶推力不再作用于管片上, 两者之间只有盾构机向前推进时仪器金属筒与管片洞口之间的摩擦力, 隧道裂隙不再产生比较明显的变化.
(3)倾角
整个切削过程中隧道切削环管片转动情况如图11所示.
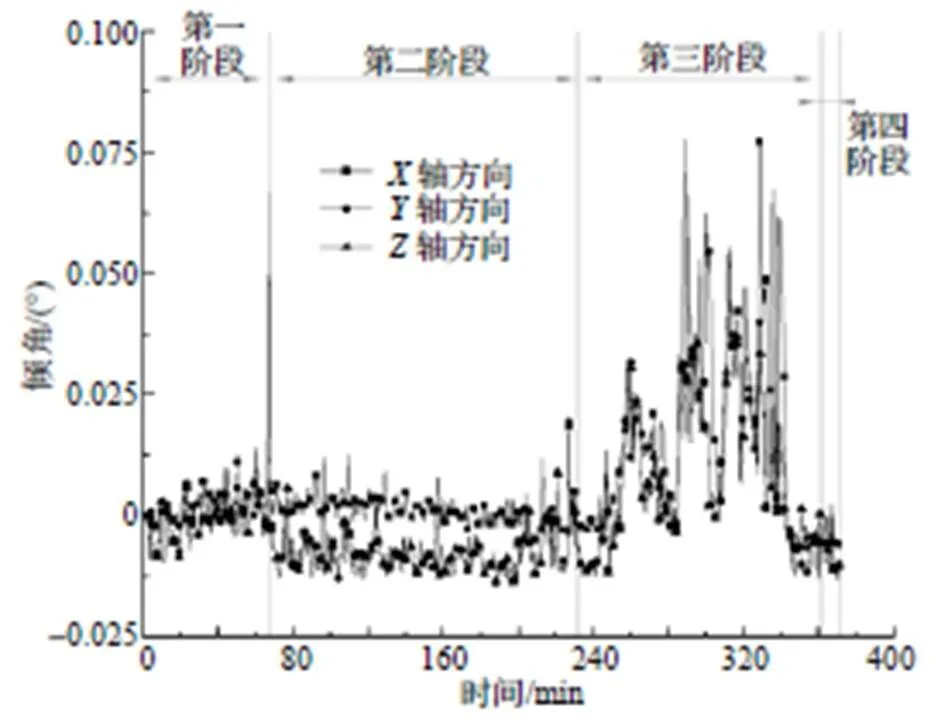
图11 管片倾角变化曲线
在第一阶段, 由于盾构机顶推力并未直接作用于管片上, 而是通过砂土传递到管片上, 随着掘进长度不断增加, 作用在管片上的力也不断增加, 使得管片的倾角也不断增加, 但增加的幅度不大, 只有0.01°. 在第二阶段初, 当盾构机顶到管片壁时, 因为顶推力忽然施加于管片上, 管片产生一个明显的转动, 沿着轴和轴方向转动了0.075°, 但该转动随即恢复. 这是由于隧道在第一阶段时并未与管片后方的土紧密接触, 当盾构机顶到管片时, 巨大的顶推力使得管片与后方的砂土接触力增加, 从而使得管片恢复至原来状态. 且因管片左侧的砂土缺失, 侧面土压力减小, 管片沿着轴和轴方向转回的角度略大于被接触时转动的角度. 在盾构机不断切削管片的过程中, 由于盾构机顶推力与土压力之间保持平衡, 使得管片并未产生较大的转动. 在第三阶段, 由于盾构机钻穿管片导致切削环处管片内部的应力集中与应力重分布, 引起管片产生了0.0625°的转动. 在第四阶段, 当盾构机钻穿隧道管片后顶推力不再作用于管片, 此时管片主要受到右侧的土压力, 管片转动至-0.012°后整个体系恢复平衡, 管片不再产生转动.
(4)振动
整个切削过程中隧道切削环管片振动情况如图12所示. 为了避免切削时破坏振动传感器, 将传感器设置在第6环. 在第一阶段, 盾构机切削加速度通过砂土传到管片上, 因此管片产生了轻微的振动. 在第二阶段, 由于管片第6环与第7环间存在缝隙且混凝土向外传递振动时会削减一部分振动, 因此第二阶段振动强度与第一阶段相差不大. 但随着掘进的进行, 盾构机与第6环之间的横向距离逐渐缩短, 在第二阶段快结束时, 加速度呈现缓慢增加的趋势. 在第三阶段, 当管片出现破洞时, 振动迅速增强, 这是因为管片被切破后产生应力重分布, 引起振动强度迅速增加, 增加大小约为0.01m·s-2. 在第四阶段, 盾构机完全贯穿管片后, 两者之间只有盾构机向前推进时仪器金属筒与管片洞口之间的摩擦力, 此时管片振动减小至0.
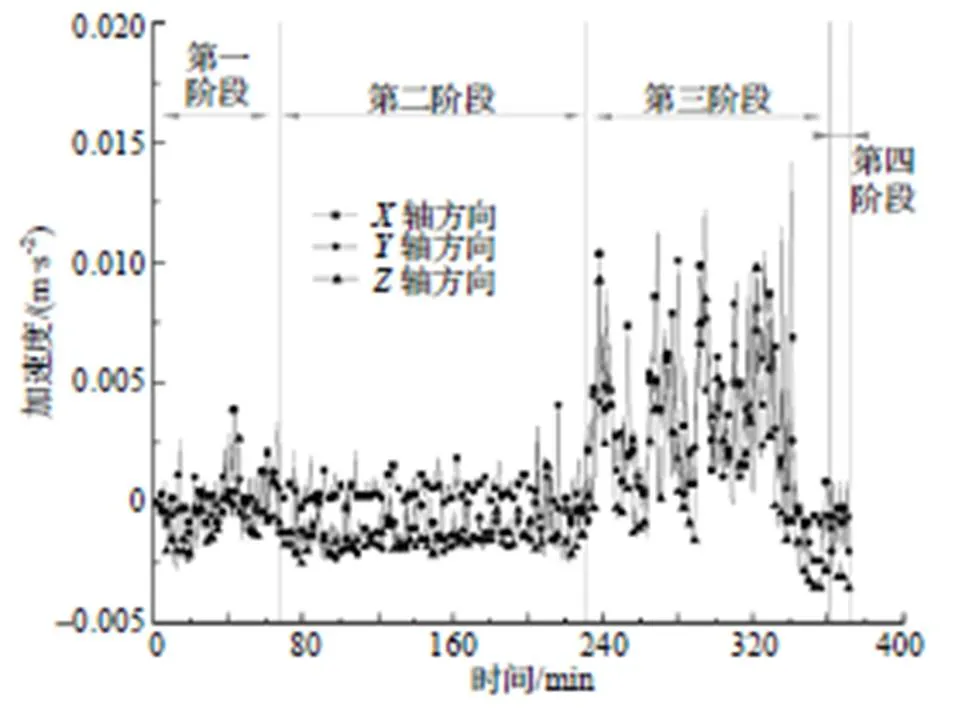
图12 管片振动变化曲线
上述试验结果表明该监测系统实现了对监测项目相关数据的无线实时传输以及预处理, 监测数据结果所采集到的隧道变形及应力变化情况与实际隧道变化相吻合[14], 证明该系统监测数据可靠有效, 可用于机械法联络通道工程的施工监测.
3 结语
(1)针对机械法联络通道施工过程中可能出现的诸多风险, 提出了一种无线智能监测系统. 该系统可对隧道管片的振动、应力、位移、裂隙以及周围土层的沉降、土压力、孔隙水压力进行实时监测, 并可通过设定预警值对施工过程进行安全预警, 以保证施工过程安全可靠.
(2)通过模型试验监测发现, 主隧道管片应力在第二和第三阶段时变化主要呈现缓慢上升的趋势. 在第三阶段初隧道破洞时, 切削环管片产生应力集中现象, 应力出现突增.
(3)整个切削过程中隧道横向位移明显大于竖向位移; 标准环与切削环之间的裂隙在破洞阶段发展较迅速, 但总体来说整个试验过程中隧道变形不是很大; 隧道管片在盾构机顶进到管壁上和第三阶段破洞后切削时产生轻微转动, 总体倾斜程度不是很大; 隧道振动仅在第三阶段时变化剧烈. 因为本试验所采用的装置为缩尺模型试验平台, 且隧道管片环与环之间不是整体浇筑, 而是拼接在一起的, 因此环间传递会损耗较多的能量, 导致隧道振动开裂情况不是很明显. 而且隧道埋放在砂土内, 当盾构机顶推力、剪切力等作用于管片上时, 管片附近的砂土以及管片之间的连接件会阻止其发生相对转动, 导致隧道倾斜情况不是很明显.
[1] 韩宝明, 李亚为, 鲁放, 等. 2021年世界城市轨道交通运营统计与分析综述[J]. 都市快轨交通, 2022, 35(1):5- 11.
[2] GB 50157—2013. 地铁设计规范[S].
[3] 刘志锋, 商曼. 基于GRP5000移动式三维激光扫描仪的隧道椭圆度监测分析[J]. 河南科技, 2021, 40(14): 86-88.
[4] Che H B, Tong L Y, Liu S Y, et al. Field investigation on the mechanical performance of corrugated steel utility tunnel (CSUT)[J]. Journal of Constructional Steel Research, 2021, 183:106693.
[5] Ye Z J, Zhang C P, Ye Y. Principle of a low-frequency transient electromagnetic radar system and its application in the detection of underground pipelines and voids[J]. Tunnelling and Underground Space Technology, 2022, 122:104392.
[6] Tejedor J, Macias-Guarasa J, Martins H F, et al. A novel fiber optic based surveillance system for prevention of pipeline integrity threats[J]. Sensors (Basel, Switzerland), 2017, 17(2):355.
[7] Liu Z L, Li S Z. A sound monitoring system for prevention of underground pipeline damage caused by construction[J]. Automation in Construction, 2020, 113: 103125.
[8] 张利文. 盾构隧道沉降监测系统的设计与研究[D]. 上海: 上海工程技术大学, 2019.
[9] Wang X Y, Ma Z, Zhang Y T. Research on safety early warning standard of large-scale underground utility tunnel in ground fissure active period[J]. Frontiers in Earth Science, 2022, 10:828477.
[10] 周济兵, 詹显军, 陈博. 一种基于情景-应对的综合管廊应急响应体系的研究[J]. 现代隧道技术, 2021, 58(S1):108-119.
[11] 肖丽, 黄宏伟. 盾构隧道可视化风险预警试验系统设计[J]. 武汉大学学报(工学版), 2016, 49(5):745-749.
[12] 李淑强, 杨一才. 机械法联络通道施工质量管理体系及监测研究[J]. 科技风, 2022(17):83-85.
[13] 梅清俊, 朱瑶宏, 马永政, 等. 滨海软土地层机械法联络通道施工影响监测分析[J]. 宁波大学学报(理工版), 2021, 34(2):73-79.
[14] 杨佳栋, 郑荣跃, 郑诗怡, 等. 机械法联络通道T接部位接收端切削模型试验研究[J]. 施工技术(中英文), 2022, 51(3):12-17.
[15] 胡威, 黄强, 李海波, 等. 机械法联络通道施工对T接部位沉降影响的实测与数值分析[J]. 施工技术(中英文), 2022, 51(13):68-74.
[16] 周玉甲, 郭利伟, 肖海燕,等. “北斗+安全”边坡综合监测预警系统设计与实施[J]. 湖南交通科技, 2022, 48(3):183-188.
Mechanical construction monitoring of contact channel based on scale test
ZHENG Shiyi, ZHENG Rongyue*, YANG Jiadong, DENG Yuebao, ZHU Yaohong
( Collaborative Innovation Center of Coastal Urban Rail Transit, Ningbo University, Ningbo 315211, China )
As a new construction method of underground structure, it is of great significance to study the monitoring technology of mechanical connection passageway. Aiming at the problems of insufficient integration of monitoring targets and low information level in current engineering, a complete online intelligent monitoring system for the construction safety of contact channel is proposed based on the Ningbo Metro mechanical contact channel project. The system is divided into application layer, transmission layer and perception layer, and has sampling, storage, transmission, data processing and early warning functions. The development law of deformation and stress during the excavation of the contact channel is tested by scale model test, and the reliability of the monitoring system is verified. The test results show that the system can achieve real-time monitoring, wireless transmission and other objectives, meet the monitoring needs of practical engineering, and can be further extended to practical engineering.
contact channel; mechanical construction; wireless monitoring; scale model test
TU91
A
1001-5132(2023)03-0079-08
2022−12 −26.
宁波大学学报(理工版)网址: http://journallg.nbu.edu.cn/
北仑区关键核心技术攻关项目(2022001); 宁波市重大科技攻关暨揭榜挂帅项目(2022Z063).
郑诗怡(1999-), 女, 浙江宁波人, 在读硕士研究生, 主要研究方向: 地下工程. E-mail: zhengsymail@qq.com
通信作者:郑荣跃(1964-), 男, 浙江宁波人, 教授, 主要研究方向: 软土地基处理. E-mail: rongyue@nbu.edu.cn
(责任编辑 韩 超)