无位置传感器电机的启动控制设计与研究
2023-05-25王会玖刘兵仁
王 臻 成 瀚 王会玖 刘兵仁
(公牛集团股份有限公司 慈溪 315314)
引言
随着产品越来越轻薄,集成化程度越来越高,产品内部的冗余元件被逐步取消,甚至一些必要元件也在通过各种创新的方式进行替代。
本文展开的就是通过技术迭代引入的电机控制方法,当然它也有自身的特点,无法工作于受不定外力影响的环境,但对于外界影响较少的无人机、风扇、个人护理产品等,却有较广的应用前景,并能因此带来结构创新的思考。
内容是基于星形连接方式的三相无刷电机进行讨论的,其控制方法主要有方波控制、正弦控制、矢量控制三种,其难易程度也呈递增的关系。虽然说方波控制是其中最简单的,但是由于其控制逻辑简单、需要运算少,特别适用于成本敏感、转速要求高的场景中。
方波控制方法简单,但却有不简单的应用,这就是无位置传感器的方波控制方法。它的特点是可以节省电机上的位置传感器,使电机更小巧,并可置于传感器无法布置的环境,仅通过供电线即可实现电机位置的感知和控制。
1 无位置传感器的实现方法
无位置传感器的无刷电机控制是通过对三相电压波形的感知来实现的,其难点在于启动时电压、电流不稳定,无法获取有效参考而启动困难。虽然电机上磁阻随位置而变化,可在静止转动时被检测到,但大多数电机其变化较小无法被可靠测量。
常规的处理还是对电机进行开环启动、闭环运行的方式执行。开环启动根据目的的不同又分为预定位和加速阶段,其中预定位为获取当前转子的电角度或控制达到特定的电角度,加速为以一定的换相频率对转子进行强拖使其达到能稳定获取反电动势的转速;闭环运动则是根据可稳定捕获的反电动势作为换相依据达到闭环控制的目的。
1.1 开环控制
开环阶段就像暗盒,控制器对电机的运行状态一无所知。不能确定转子所处的电角度,不能确定转子是否处于低速运行,不能确定转子是否处于摆动状态,对控制构成不确定。为了使转子状态处于相对的可知,与我们设定的状态匹配上,就需要根据电机的特性做一些特殊的操作,确定它的状态和角度,否则很难保证启动的稳定达成。特殊的操作就是预定位,目的是让电机在启动前达到明确的状态,使给出设定的操作可以实现转子的加速。
1.1.1 预定位
根据设计思路的不同可以分为感应定位法和控制定位法。
1.1.1.1 感应定位法
感应定位法的目的是获取当前转子位置,是通过对电机三相进行多组脉冲通电,获取电流以判断出电机所处60 °的电角度状态。
如图1 所示,打开Q1、Q2、Q4 并关闭Q0、Q3、Q5,实现A相上桥臂、B相下桥臂、C相下桥臂打开的控制,如图2 的U0(001)控制,根据基尔霍夫定律此时母线电流即为A 相电流,与B 相、C 相电流之和相同方向相反,定义此时的电流为IA+,对此也可使用单电阻方式进行电流采样,并将获取的电流作为IA+。又因为有定子的磁场作用,就会在线圈上形成感生电而体现在电流IA+上。

图1 电机控制示意图
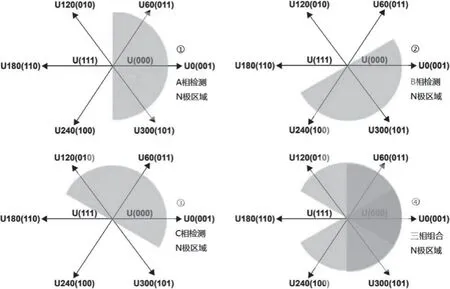
图2 感应定位法确定电角度示例
检测完IA+后,关闭相应的控制,再进行反向的控制,打开Q0、Q3、Q5 并关闭Q1、Q2、Q4,实现A 相下桥臂、B 相上桥臂、C 相上桥臂打开的控制,如图2 的U180(110)控制,在检测此时的电流,并定义为IA-,此时也会因为定子的磁场作用,会在线圈上形成感生电而体现在IA-上。这也是我们的目的,为了获取磁场与当前控制的关系。
此处假定线圈的绕线方式在转子N 极与A 相对应时有正向电流作用于IA,则IA+大于IA-时就能说明当前转子N 极与定子的A 相处于相对的位置,能反映当前N 极的180 °范围,如图2 中的①所示,其中深色区域表示N 极判定区域。
同理测试B 相上桥臂、A 相下桥臂、C 相下桥臂打开的IB+,以及B 相下桥臂、A 相上桥臂、C 相上桥臂打开的IB-,以及A、B、C 三相绕组方式相同的特性,比较IB+、IB-的大小就可获取,当前转子N 极与B 相的180 °关系,如图2 中的②所示。
再测试C 相,就可获取到转子与C 相的180 °关系,如图2 中的③所示。
因为采用的是脉冲控制方式,控制的时间极短、力矩极小,不会导致转子位置的变化,因此基于上述的结果叠加A、B、C 相的有效区域,重叠的部分就是电机N 极所处的位置,因此可以将当前的电角度定位到60 °范围,该范围如图2 中的④所示,为U0(001)的前后30 °范围,当磁极的电角度确认后就方便设置第一步控制了。
该方式需要分步操作完成定位,有操作时间的间隔,基于电机静止或低速运行的情况。若电机初始具有较快转速会需要变更策略,采用控制定位法,或是先进行刹车操作,再或是直接切入闭环。
1.1.1.2 控制定位法
控制定位法的目的是将转子转动到预定位置,是通过对电机两相进行短时间通电的方式将转子位置锁定在固定区域。
具体为控制图1 中的功率管Q1、Q2 打开,其他功率管关闭,实现A 相与B 相之间的通电,以推动转子转动。需要注意的是Q1、Q2 打开时力矩的控制非常关键,力矩过小会导致移动不能达到锁定位置,力矩过大又会导致转子达到锁定位置时会发生振荡。因此需要反复调试使转子距离预定位点存在120 °逆转方向的情况下,达到锁定位置时振荡尽可能小。除力矩的因素,定位控制的时间也需要根据转子惯性的大小进行反复测试进行确定。
有个特殊状况需要着重考虑,通电后磁场与转子磁场呈180 °的情况,此时因为没有力矩的产生会导致转动失能,不能达到预定位置。解决的办法有两种,一是电机设计时构建定子大小边、槽极不同等不稳态;一是将一步的定位控制改为两步,使用具有角度差的两步操作达到锁定位置的目的。
在实际应用中,采用不稳态的电机结构和单步的锁定方式操作上更便捷、更可靠。只执行一次锁定的方式较容易出现定位不理想的状况,改为两次锁定的方式基本可以解决该问题,并可以较好的解决转子振荡的问题,当然在锁定后使用感应法再确认转子的位置也不失为稳妥的考量。
1.1.2 加速
预定位后电机就进入到强拖的加速状态,此阶段需要将转子的转速提升到可以捕获稳定反电动势的状态。主要的方法有恒频升压法、恒压升频法和升频升压法三种方式。
恒频升压法:
采用固定的换相频率,通过逐步提高PWM 占空比的方式提升驱动电机的电压,以慢慢地提高转子的转速。
恒压升频法:
将固定的电压加载到电机的驱动端,以逐步提高换相频率的方式,使转子转速逐步增加。
升频升压法:
通过逐步提高PWM 占空比的方式提升驱动电机的电压,并逐步提高换相频率,使转子转速达到闭环切入条件。
三种方式均处于开环状态下操作,都有失速和失步可能,并伴随启动失败的发生。因此,设计升速曲线时要尽量减少该过程操作的步数,尽量缩短该过程持续的时间,避免因为太多的不确定导致失败的概率加大。
升频升压法因为同时变化的量相对其他两种更多,控制考虑更复杂,不推荐使用。虽然加速阶段是开环控制的,但是设计思路可以考量闭环的加速过程。在有感闭环加速的过程中,最直接的表现是换相频率的提高,因此以恒压升频法进行操作更贴近于闭环的逻辑。
图3 所示为相电流在成功无感启动时的波形表现,除最左侧半个周期因预定位呈现较特殊波形外,其他时刻均呈正弦波形,为有效推动信号,可以看出从左至右正弦波越来越紧凑,体现的是相上电流周期变化的时间越来越快,反应的是换相频率的逐步提高。

图3 无感启动过程相电流波形
要使开环控制更贴近闭环操作就有必要了解时间平方律函数,为:
式中:
ω—开环步进速度;
ωs—开环起始速度;
k—开环结束速度减去开环起始速度的值;
t—加速时间。
根据公式(1)在确定好开环起始速度和开环结束速度后,可以获取开环步进速度与加速时间的关系。
起始速度一般设为额定转速的1/60,结束速度一般设置为额定转速的1/6,加速时间一般设置(2~4)s。由此便可得到开环步进速度,以及切入闭环需经历的周期数和控制间隔,从而确定控制的占空比以配置合适的驱动电压,并在测试中修正该值。为避免操作步骤过多变化过大,一般做法为控制其中两相的方式,并固定在估算的特定60 °范围的电角度进行操作,实现加速转子的目的。
1.2 闭环控制
闭环控制采用的是反电动势法,即BEMF 法。
过零点是指不通电相的反电动势过零状态,之所以可以采用反电动势法的原因在于它与霍尔信号的关系,如图4 所示。实线部分为霍尔传感器信号,虚线部分为反电动势信号,反电动势正负交替的部分为反电动势过零点,每个栅格表示60 °的电角度。

图4 霍尔信号与反电动势的关系图
例如HALL_R 信号对应,由图可知过零点信号滞后霍尔信号变化30 °,过零信号可以直接用于换相操作,但会导致效能的下降,并会降低电机运行的平稳性,因此补偿滞后的30 °对电机的稳定高效运行很有必要。
首先,我们来看下电机的组成以及如何获取过零点事件。如图5 所示,三相电机中每相的组成是相同的,即每相的绕组Z 可以等效为电阻、电感与反电动势。由于方波电机控制在任意时间仅有两相通电,假设此时我们控制Q1、Q6 导通,会产生由R 到B 的电流,此时的电压URB是VDC,其中点电压为VDC/2,且不管如何切换通电相,其中点的值始终为VDC/2,因此可以将BEMF 的过零点偏置为VDC/2。而我们需要做的就是对空闲相与过零点偏置电压进行比较获取过零事件。

图5 BEMF 检测原理示例
偏置的过零点电压有了,但它对应的位置是电机中性点,处于电机内部,要引入它的判断需要在电机外部构建虚拟的中性点,具体实现方式如图6 所示,采用各相连接相同阻值的电阻搭建虚拟中性点,然后与空闲相一同接入比较器进行捕获。
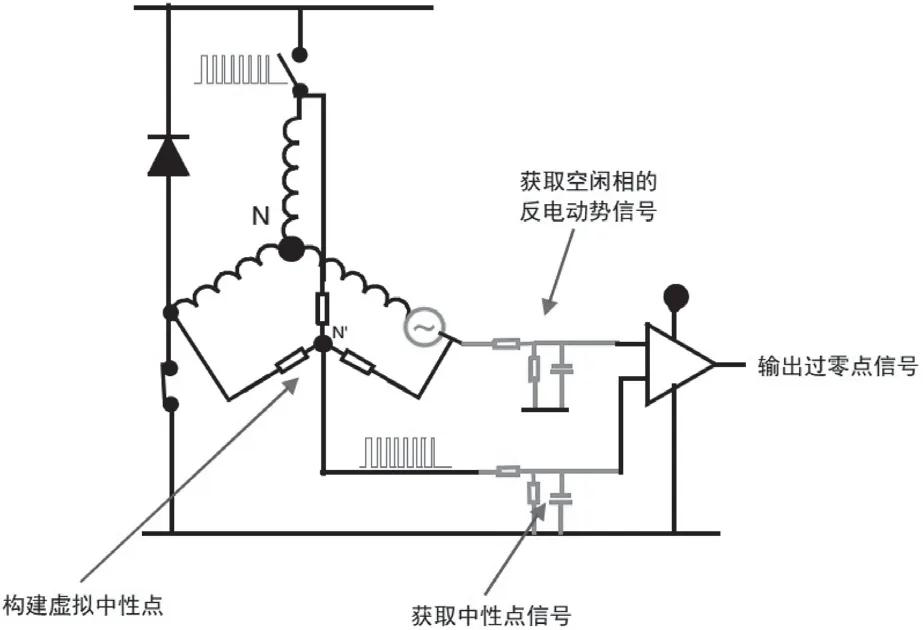
图6 电机虚拟中性点的构建与反电动势比较
接下来,我们来看下如何实现30 °换相偏置。应用较简便的办法是通过软件定时将换相延后半个换相间隔,在过零事件发生时加入定时操作补偿角度运转会消耗的时间。不过该方法需要基于获取到确定的换相时间,而设备刚运行时换相时间是未收敛的,因此至少需要开始的360 °电角度运行于滞后的操作,然后根据获取到的换相时间调整滞后的操作,达到运行的稳定高效,并根据新获取的换相时间不断调整。
最终实现BEMF 校正后的闭环稳定运行。
2 技术特点/优势
无位置传感器电机最大的特点就是取消了位置传感器的使用,带来了结构的简化、成本的降低,只是在控制逻辑上稍显复杂。不过只要理清了它的原理,就不难将它应用到合适的场景中。
根据应用的不同,它的控制方式也有多种区别,有上桥PWM 控制、下桥PWM 控制、上下桥均PWM 控制的方式。输入高压的情况下,因为自举的存在往往采用的是下桥PWM 控制;输出大电流的情况下,因为功率器件N 管工艺较易达到往往采用的也是下桥PWM 控制;低压小电流的情况下,因为上桥控制方便往往使用的是上桥PWM 控制。
3 结语
本文所述的无位置传感器的电机启动控制主要分为开环控制和闭环控制两个部分,与有传感器方式相比多了开环控制。
多出的开环控制由于不具备有效的手段获取转动的状态而成为控制的难点,如何做好它的全相位稳定启动是无位置传感器电机控制的关键所在,也是我们需要仔细揣摩和探讨的部分。
设计中所使用的方法也是从较理想的状况进行分析的,在实际的应用中需要考虑外界干扰与自身的影响,例如初始状态非静止、逆风运行、自转惯性大、背压启动等情况。同时也要根据使用芯片的处理能力选择合适的方法,达到最佳的适配。