自动紧急转向系统测试场景及试验设计研究
2023-05-23张越卓凯敏袁定立王旭
张越 卓凯敏 袁定立 王旭
(中汽研汽车检验中心(武汉)有限公司,武汉 430056)
主题词:自动紧急转向 横向避障 典型场景 道路试验
1 前言
道路安全已成为世界各国急需解决的重大难题[1-2],94%的道路碰撞事故归因于人类驾驶员,即超速和驾驶时醉酒等[3-4]。先进驾驶辅助系统(Advanced Driving Assistance System,ADAS)被认为是减少道路碰撞事故的有效解决方案[5-6]。目前,量产的前向碰撞预警(Forward Collision Warning,FCW)系统、自动紧急制动(Automatic Emergency Braking,AEB)系统等均为纵向主动避障系统[7]。此类系统在紧急情况发生时能通过声音提醒或者实施制动辅助驾驶员,在一定程度上能避免碰撞事故的发生,但在相对速度较高、路面附着条件差、与障碍物重叠率低等特定场景下存在因制动距离过长而造成无法完全避碰的缺点。
自动紧急转向(Automatic Emergency Steering,AES)系统是利用摄像头、雷达等传感器检测前方障碍物等环境信息,通过控制车辆的横向运动来避免碰撞的一项主动安全技术,主要包含转向路径规划与路径跟踪。
研究表明,在车速达到100 km∕h 时,与全力制动避开碰撞障碍物所需距离相比,汽车在保证侧向稳定性的前提下采取转向方式避免碰撞,所需距离减少30%[8]。由此可见,在某些工况下采取转向方式避障效果更佳,若雨、雪等天气原因导致路面附着系数降低,则采取转向避让需要的最短距离甚至仅为纵向制动避让所需距离的50%。根据Seewald 的研究,在车辆快速行驶条件下,全力制动无法避免碰撞时,仍有可能通过紧急转向规避碰撞事故[9]。
快速行驶条件下通过横向和纵向联合作用的方式对汽车进行主动避障控制能极大提升极限工况下车辆的稳定性能以及驾乘人员的安全性。
本文重点分析AES系统的测试方法及场景,同时对道路试验进行设计,以期为AES技术规范化及测试验证提供技术和理论支撑。
2 测试场景及评价指标分析
2.1 AES典型测试场景分析
AES 系统旨在通过自动转向帮助驾驶员在紧急情况下避免碰撞。我国目前已形成AEB、车道偏离预警(Lane Departure Warning,LDW)、FCW 等ADAS 功能的标准,但对AES系统仍缺乏必要的规范测试场景及评价指标,本文对危险事故场景和欧盟ECE-R79 自动转向标准测试场景和评价指标进行分析[10]。
事故场景驾驶注意预测(Driver Attention Prediction in Driving Accident Scenarios,DADA)数据集建立的目的是预测正常行驶状况、危险状况和事故状况下驾驶员的注意力,为复杂交通场景中的类人理解提供大规模数据验证平台[11]。其包含2 000 个视频序列、658 746 帧图像,是目前最大规模的驾驶注意预测数据集,通过对高速、城区、乡村、隧道等各种场景类型的碰撞事件进行梳理,数据集划分为具体的本车转向遭遇(摩托车、三轮车、行人、自行车)、侧向车辆(摩托车、三轮车)逼近、横向切入(摩托车、三轮车、行人、自行车)、前方障碍物(车辆、行人、自行车)、斜向遭遇、狭窄道路遭遇等37 个AES紧急场景,如图1所示。

图1 DADA典型AES场景示意
ECE R79 中针对AES 系统的测试主要分为2 个部分,即功能要求报警测试和转向干预力测试,要求AES系统的报警信号最迟在车辆AES系统干预前以视觉、声音或者触觉警告形式向驾驶员发出提示,解除AES系统的转向干预力不应超过50 N。ECE R79 标准测试场景主要包括相邻车道汇入、换道过程后方车辆快速接近、车道内障碍物和车道内误响应等场景。
典型场景类型形成流程如图2所示:将DADA数据集中典型AES 场景作为真实场景数据,ECE R79 附录8中针对紧急转向部分提出的相关要求及测试场景作为专家经验数据,通过将真实场景数据和专家经验数据进行冗余清除,在保证数据质量的前提下,形成可用的场景数据集;对场景要素关键信息进行标注,根据AES系统功能需求建立场景分类规则,如本车速度、切入车辆速度、切入位置、碰撞目标;聚类逻辑场景,将符合分类规则的场景聚类为相应的逻辑场景,明确要素参数空间,得到如表1所示的AES 系统适用的5种典型场景类型。
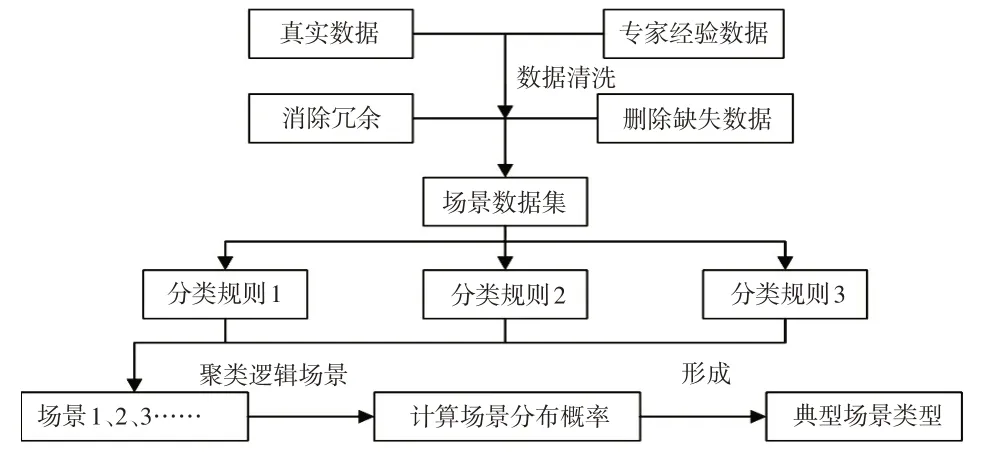
图2 典型场景类型形成流程

表1 AES典型场景测试步骤及通过条件
2.2 AES系统评价指标分析
AES系统评价指标如表2所示,主要分为2类,即避免发生碰撞和轨迹跟踪误差评价。避碰适用于评估AES系统的功能,轨迹跟踪误差是决定AES系统控制性能的理想因素。在欧洲新车评价规程(European New Car Assessment Program,Euro-NCAP)安全评级中,将AES 系统功能下避碰概率和缓解行人碰撞时的伤害程度作为主要评价指标。
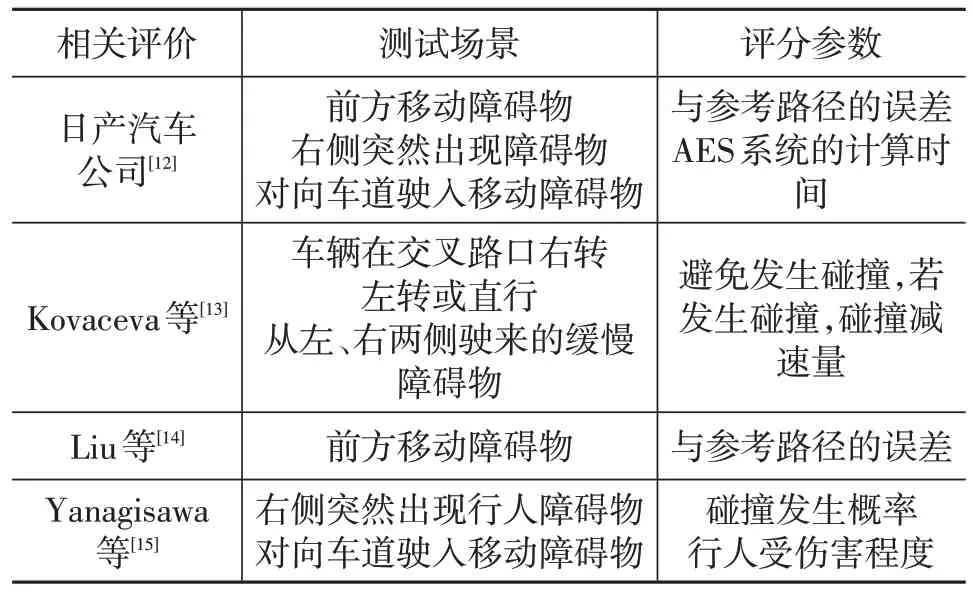
表2 AES功能评价指标分析
3 道路试验方案设计
目前,学者对汽车AES技术的路径规划和轨迹控制研究较多,并开展了部分仿真验证,但仍未系统形成实车道路试验的方案设计和测试规范。本文根据AES 系统测试场景和相关标准进行实车道路试验方案设计,开展部分实车试验对AES 系统主动避障的安全性能和可靠性进行测试,如图3所示。
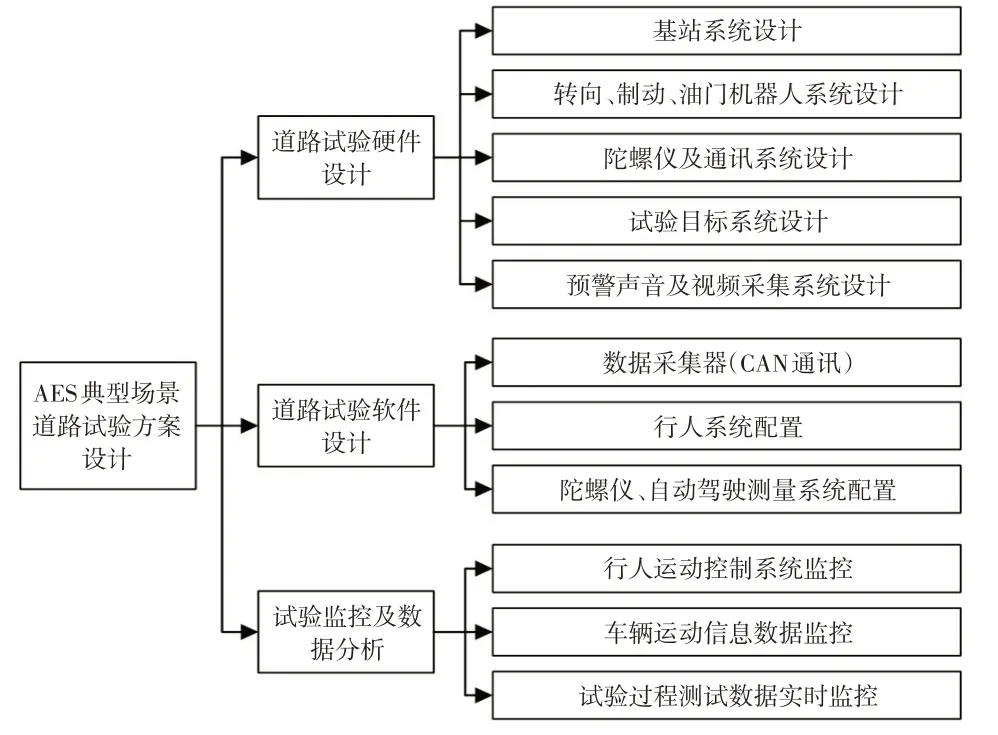
图3 整车道路试验软硬件及监控方案
整车道路试验软、硬件及监控方案主要子系统包括通讯基站系统(基站、GPS信号接收天线、通讯模块)、机器人系统(转向、CBA600制动、油门机器人)、惯性导航差分定位系统、试验目标系统(运动假人、气球车)、预警声音及视频采集系统。
整车道路试验如图4所示,由油门踏板和制动踏板机器人进行速度控制。通过GPS 和惯性导航系统对车辆的速度、加减速度、位置信息进行采集分析,实时动态测量(Real Time Kinematic,RTK)系统锁定后实时动态精度达到2 cm。将符合标准测试要求的假人、气球车用作测试AES系统性能的前方目标物,以保证易被传感器识别为真实的目标行人及车辆。对报警视频及声音信号进行实时捕捉,用于评价和优化预警时刻,避免预警时机过早或过迟。德威创数据采集器通过CAN总线通讯协议获取被测车辆CAN 总线上的车速信息、横摆角速度、侧向加速度、转向等状态参数。

图4 整车道路试验
4 试验监控及数据分析
本文选择AES 系统作用事故场景中发生较多的障碍物横向切入典型场景进行试验研究。
为验证软硬件设计平台对自动紧急转向测试的可靠性,利用开发的AES测试设备对其性能进行测试。数据采集系统通过CAN 通信对车速、碰撞时间(Time to Collision,TTC)、相对距离、报警信号等信息进行采集。
测试开始前,将假人模拟系统设备组装好并固定,然后将测试车辆(Hunter)调整到合适的区域内,并令车辆的纵向中心面与车道线对齐。测试过程中,由驾驶机器人控制车辆航向角和速度,假人目标在不同的测试场景中可通过TTC的计算得到不同的移动假人启动位置。
为验证所设计试验方案的可行性,在汽车试验场的干燥沥青路面分别开展40 km∕h、60 km∕h、80 km∕h 车速下的AES系统避碰试验,并进行对比分析。在图5实时数据平台上对行人系统和车辆运动进行监控。由图5a可知,移动假人可根据不同车速、不同相对距离使得假人目标突然出现在车辆前方以模拟紧急纵向制动不及的危险场景。由图5b可知,测试过程中GPS信号良好,搜索到多颗导航卫星且已实时锁定,可精确采集车辆的实时运动状态。试验过程测试数据实时监控平台可反映试验过程,如图6所示,可获得试验时间、车辆报警时间、相对距离、实时车速等信息。
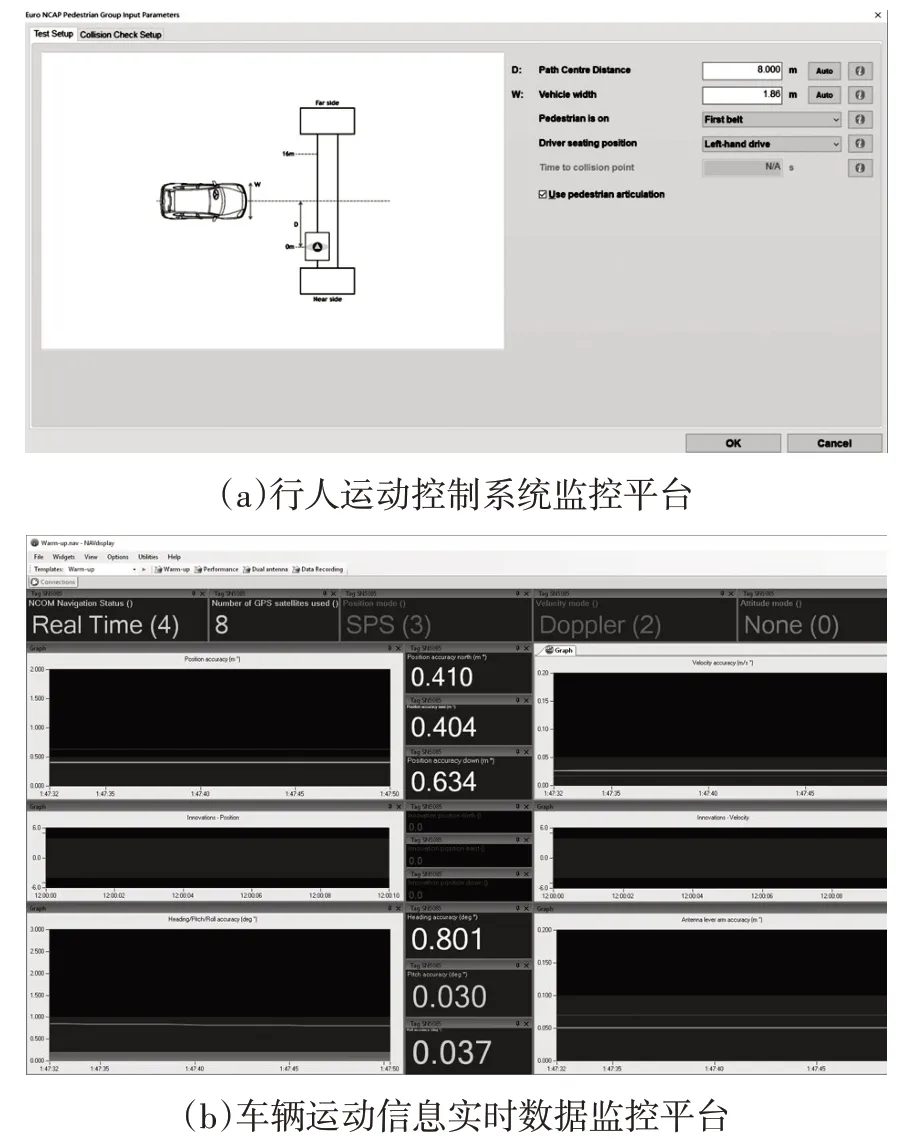
图5 实时数据监控平台

图6 试验过程测试数据实时监控平台
测试车辆速度、加速度、TTC 如图7 所示,在3 种车速下对于前方突然出现行人的情况,车辆制动相对距离、实时车速均有所差异,速度较低时将会有非常长的预计碰撞时间。
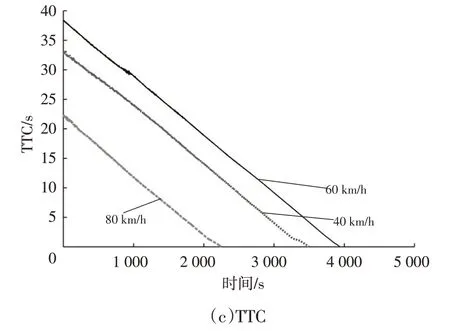
图7 测试过程车辆速度、加速度、TTC
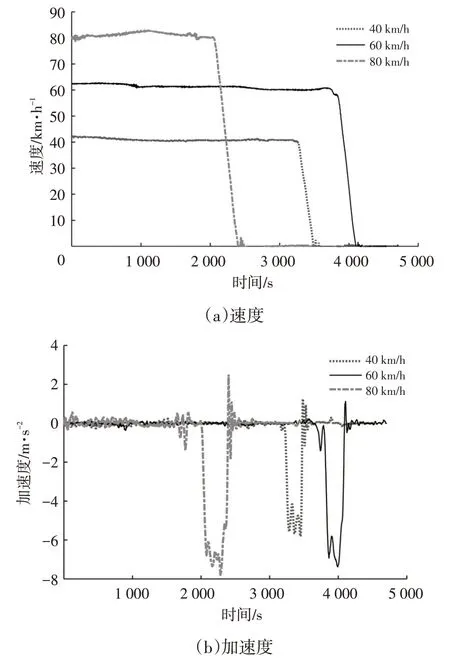
3 种车速下的AES 系统避碰试验结果如表3 所示,可以看出,在障碍物横向切入的紧急情况下,会直接触发测试车辆的紧急报警,在3种试验车速下测试车辆表现有较大差异,随着车速提高,车辆制动及转向紧急避障过程中最大减速度相应变大,但车辆在达到碰撞点时车速也越大,80 km∕h 车速下车辆的制动最大减速度为7.81 m∕s2,紧急制动后到达碰撞点时车速为49.42 km∕h,若非通过AES系统进行横向避障将造成较大事故。
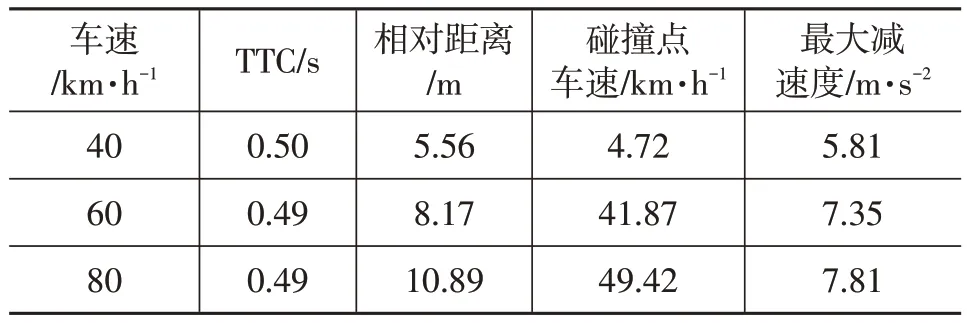
表3 不同车速下试验结果
5 结束语
本文通过对2 000 个危险交通事故场景的分析研究,分类形成37个AES系统紧急场景库,结合ECE-R79对AES 系统的相关测试场景要求,形成5 类典型场景。根据AES的测试场景分类情况开发了典型测试系统,基于测试设计的软硬件系统对突然出现行人的场景进行测试评估,结果表明,所开发的AES 测试系统能够按照预期目标进行工作,验证了试验设计方案的可行性和有效性。在后期研究中将开展更多的场景测试,形成更完善的测试评价体系。
