基于RVMD-RobustICA-ST联合相干性分析的电驱动总成噪声源识别*
2023-05-23张威景国玺杨征睿高辉王东
张威 景国玺 杨征睿 高辉 王东
(1.河北工业大学,天津市新能源汽车动力传动与安全技术重点实验室,天津 300400;2.中汽研(天津)汽车工程研究院有限公司,天津 300300;3.中国汽车技术研究中心有限公司,天津 300300)
主题词:集成一体化电驱动总成 噪声源识别 奇异值分解 变分模态分解鲁棒性独立分量分析 S变换 相干性分析
1 前言
电动汽车动力系统正朝集中一体化、高系统效率、高功率密度方向发展。同时,多源激励性、驱动电机高速化、系统结构刚度降低等问题使集成式电驱动总成振动噪声特性相比电机或减速器单体更复杂。
一些学者基于阶次分析及心理学指标分析纯电动汽车动力总成,发现减速器、差速器噪声较电机更突出[1]。L.Humbert 等[2]基于磁固耦合数值模型发现电机切向电磁力会对减速器动态噪声特性产生影响。林巨广等[3]采用阶次分析方法分析减速器噪声并建立驱动电机的二维电磁仿真模型来分析计算电磁力,在分析电驱动总成贡献阶次基础上提出了一种优化方法并验证了其效果的显著性。李基芳等[4]通过音噪比对开关频率噪声进行了分析评价,发现改变控制器开关频率等措施对电驱动总成噪声有一定改善效果。一些学者利用十字形声阵列方法对电动汽车用电机系统噪声源进行了定位识别[5]。龚承启等[6]利用集成经验模态分析等方法识别分析起动电机噪声,确定了各独立分量与噪声源之间的对应关系。Wei等[7]结合独立分量和小波变换的经验模态分析确定了电动客车动力总成的主要噪声源。
多激励耦合性、部分时变特性使系统动态响应呈现复杂的非平稳性特征,导致当前少有学者从噪声源分离的角度对集成式电驱动总成的振动噪声特性进行研究。本文基于占优特征值准则变分模态-鲁棒性独立分量分析(Ruled Variational Modal Decomposition-Robust Independent Component Analysis,RVMD-Robust⁃ICA)联合算法对某集成式电驱动总成单一通道噪声源进行分离,利用S 变换(S Transform,ST)、快速傅里叶变换(Fast Fourier Transform,FFT)方法对分量信号时频特性进行识别,采用二次残差(Vestigial Quadratic Mismatch,VQM)、相干性分析方法对各激励源贡献度进行定量分析。
2 基本理论
2.1 占优特征值约束的变分模态分解
由线性混合模型得到的观测信号可表示为:
式中,X(t)为观测信号;A为线性混合系统矩阵;S(t)为源混合信号;N(t)为噪声信号。
当N(t)为高斯白噪声时,将观测信号去均值化后对其协方差矩阵RX(t)进行奇异值分解(Singular Value Decomposition,SVD):
式中,E为矩阵期望符;H 为共轭转置符;U、V为酉矩阵;ΛS=diag(λ1,λ2,λ3,…,λn),λ1≥λ2≥λ3≥…≥λn;ΛN=diag(μ1,μ2,μ3,…,μn),μ1≥μ2≥μ3≥…≥μn;n为信号维数[8]。
相邻主特征值之比为:
占优特征值所对应的分量信号能量远大于非占优特征值所对应分量信号能量,占优特征值与非占优特征值的分界处γk+1相比γk发生突变,则可知源混合信号的维数为(k+1)。
基于上述约束条件,变分模态分解(Variational Modal Decomposition,VMD)引入最小均方误差准则、维纳滤波等方法对X(t)进行多次迭代,分解为若干个本征模态函数(Intrinsic Mode Function,IMF)分量信号xk(t)[9],对每个IMF 分量信号进行希尔伯特(Hilbert)变换得到单边频谱解析信号:
式中,j为虚部单位;*为卷积符;δ(t)为单位脉冲函数。
通过L2范数对调制信号进行梯度计算,构造变分约束条件:
式中,ωk为第k层对应的中心频率;k为分解层数;K为最大分解层数;∂为偏导符。
引入拉格朗日(Lagrange)乘子λ和惩罚因子α,将待解决变分问题从约束性转变为非约束性。基于交替方向乘子法对算法进行不断迭代更新,最终得到IMF 分量、中心频率和拉格朗日乘子的最优解。
2.2 鲁棒性独立分量分析
鲁棒性独立分量分析(Robust Independent Compo⁃nent Analysis,RobustICA)是基于峭度对比函数和最优步长(Optimal Step Size)的一种独立分量分析算法[10]。该算法可以分解提取任意具有非零峭度的独立分量,不必假设源信号为亚高斯或超高斯等特定类型。
算法收敛性能在很大程度上受限于步长:
式中,μopt为最优步长;kurt为峭度;w为分离向量;μ为步长;g为步长迭代优化的线性搜索方向。
归一化峭度对比函数k(w)可由关于步长μ的四次多项式表示,再通过多项式的根确定全局最优步长。搜寻过程如下:
a.基于峭度目标函数计算最优步长多项式系数:
式中,an为多项式系数。
b.在迭代方向上选择使峭度绝对值达到最大的根,从而获得最优步长:
c.更新分离向量:
d.归一化:
e.基于阈值条件判断是否满足收敛性,通过多次迭代得到分离矩阵W。
2.3 S变换
S 变换是对短时傅里叶变换(Short-Time Fourier Transform,STFT)和连续小波变换(Continuous Wavelet Transform,CWT)2 种算法取长补短而得到的一种可逆时频分析方法。其窗函数是随频率变化形状而变的高斯窗函数,且其基函数不必满足容许性条件。
任一非平稳振动噪声时域信号X(t)的ST可表示为:
式中,t为时间;f为频率;τ为时域位移;ω(f,τ-t)为高斯窗函数。
2.4 相干性分析
随机非平稳时域信号Y(t)和Z(t)间的互相关函数为:
式中,T为信号采样时间长度。
互相关函数经FFT得到互功率谱密度为:
基于负频率无实际应用意义,定义单边谱互功率谱密度函数为:
两个随机非平稳信号之间的常相干函数为:
式中,GZZ(f)、GYY(f)分别为Z(t)、Y(t)的单边谱自功率谱密度函数。
3 联合算法模型建立及验证
VMD算法将振动噪声信号从自适应划分问题转变为构造变分问题,将信号分解为不同中心频率的本征模态函数。
本文通过分解结果观察VMD算法的性能。将模拟观测信号设计为5 个不同的单频信号Si(t)(i=1,2,3,4,5),设N(t)为随机噪声,线性混合形成观测信号X(t):
设定采样频率Fs=51 200 Hz,时域特征如图1所示。
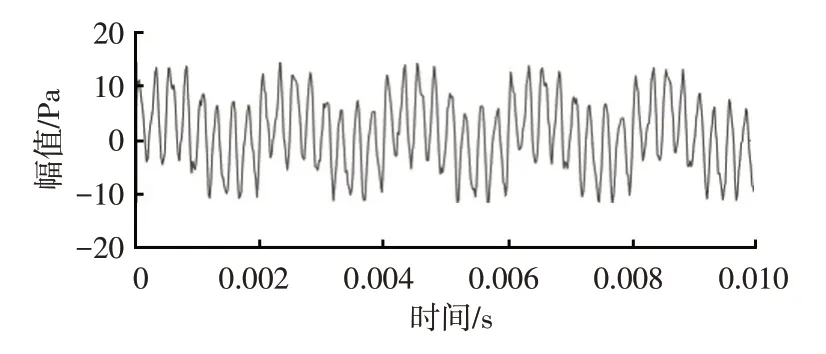
图1 观测信号X(t)时域特征
对VMD 算法性能有影响的参数为:信号分解层数k、惩罚因子α、中心频率分布形式参数i、函数优化参数top、收敛公差r,以及IMF 分量位置参数D。其中影响程度最大的参数是k和α,根据信号特性,经多次对比分析确定α=10 000,将分解层数设定为非源混合信号维数,随机设定分解层数k=7层时,模拟观测信号分解得到的各IMF分量时、频域特性如图2所示。
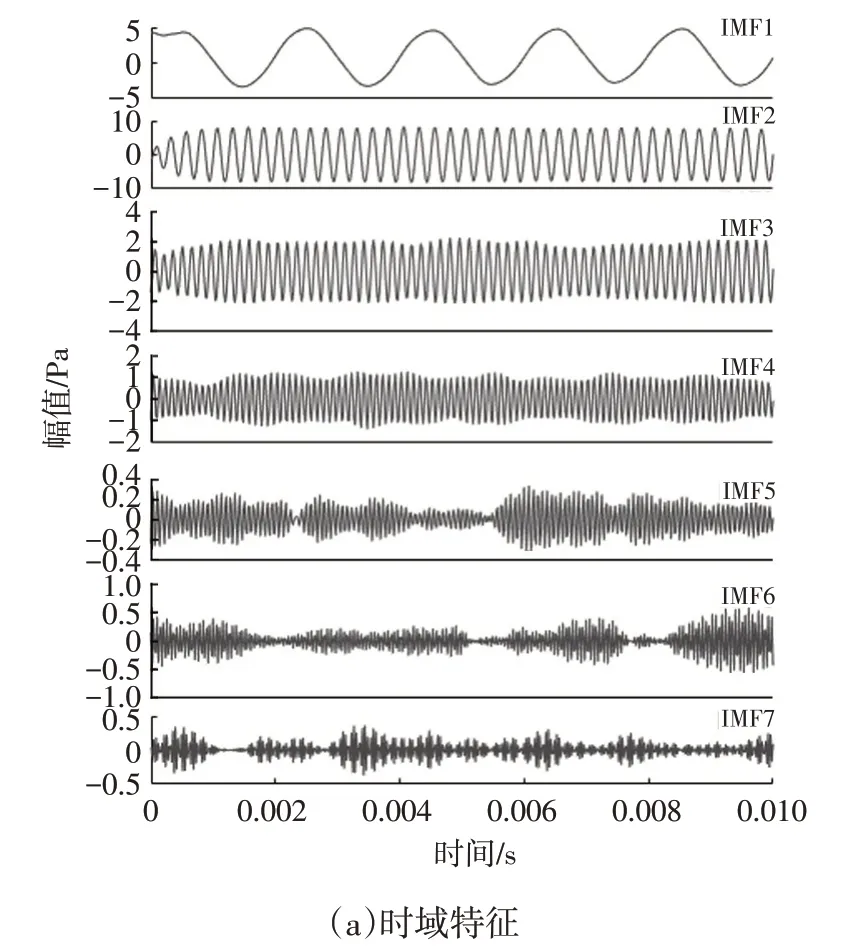
图2 k=7层时各IMF分量时域特征及频域特性
由图2可知,VMD算法的信号分解层数调整控制不合理时,IMF 分量产生过分解导致模态出现混叠现象,且由于噪声造成算法性能下降,信号中部分能量丢失。
由于模拟观测信号的源混合信号维数已知,将分解层数设定为源混合信号维数,分解结果如图3所示。由图3 可知,VMD 算法在参数设定较为合理时,由于噪声信号的存在,分解结果依旧存在模态混叠及信号能量丢失现象。
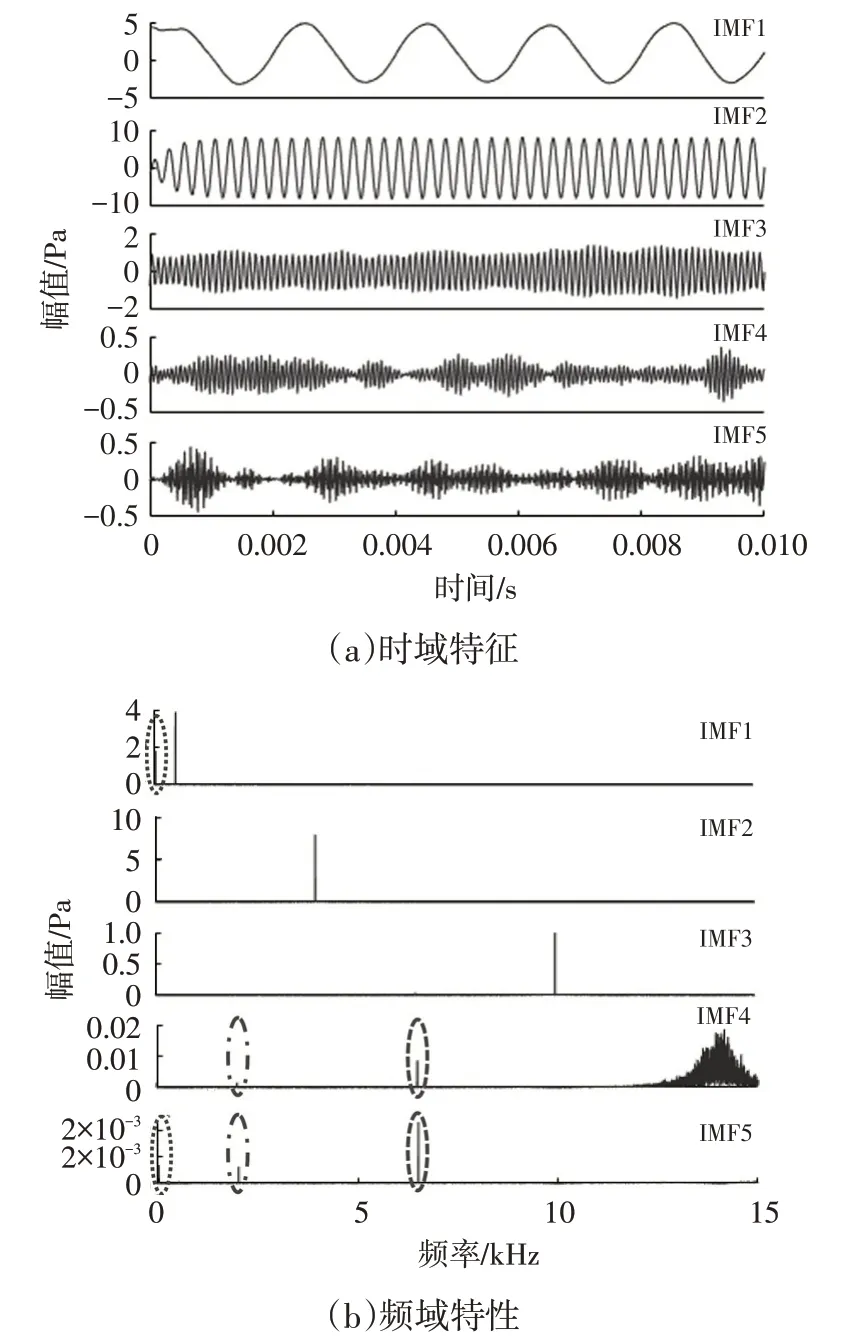
图3 k=5层时各IMF分量时域特征及频域特性
经上述对比验证发现,VMD 算法分解信号时参数信号分解层数k对其性能影响权重极大,分解层数选择不当会导致信号产生欠分解或过分解,而惩罚因子选择不当会导致IMF分量带宽变动起伏较大,从而引发模态混叠现象。VMD 算法的信号分解层数可人为控制,但是选择出最佳层数相当困难,基于此,引入占优特征值准则(Rule of Dominant Eigenvalues,RDE)对源混合信号子空间维数进行估计。现通过k的不同取值对上述模拟观测信号X(t)进行VMD分解,将各IMF分量重组建立混合矩阵,对混合矩阵进行SVD分解得到γk,如表1所示。
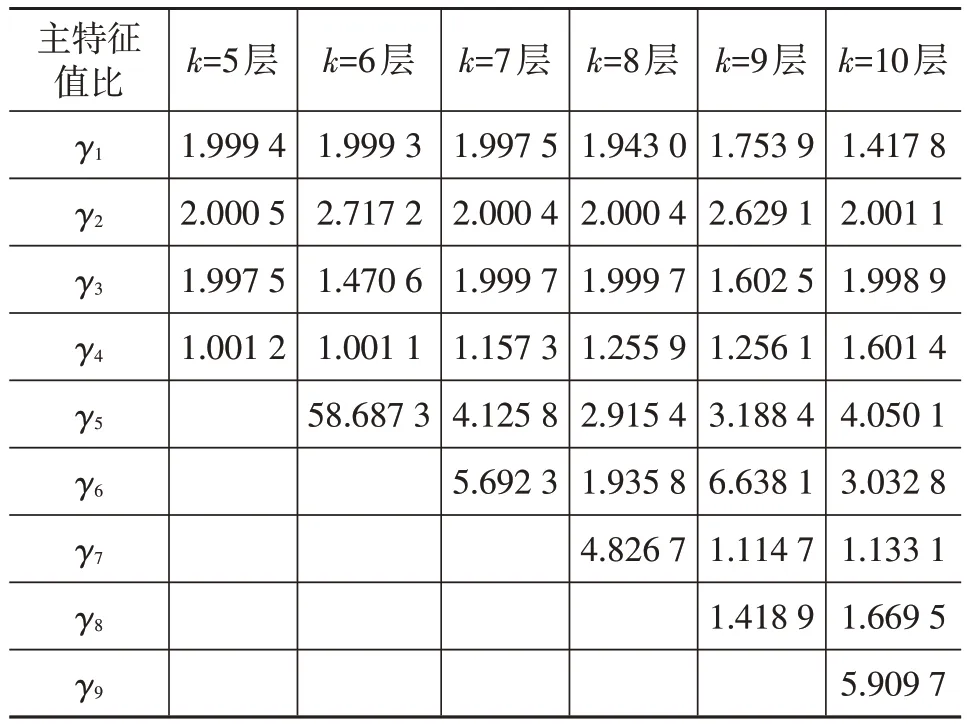
表1 不同参数VMD分解γk对比数据
主特征值比变化趋势如图4所示,由图4可以看出:随着k的调整,虽然γk的取值也在变化,但每条趋势线均在γ4与γ5之间产生较大波动且均呈上升趋势,由此可验证RDE准则的可靠性。
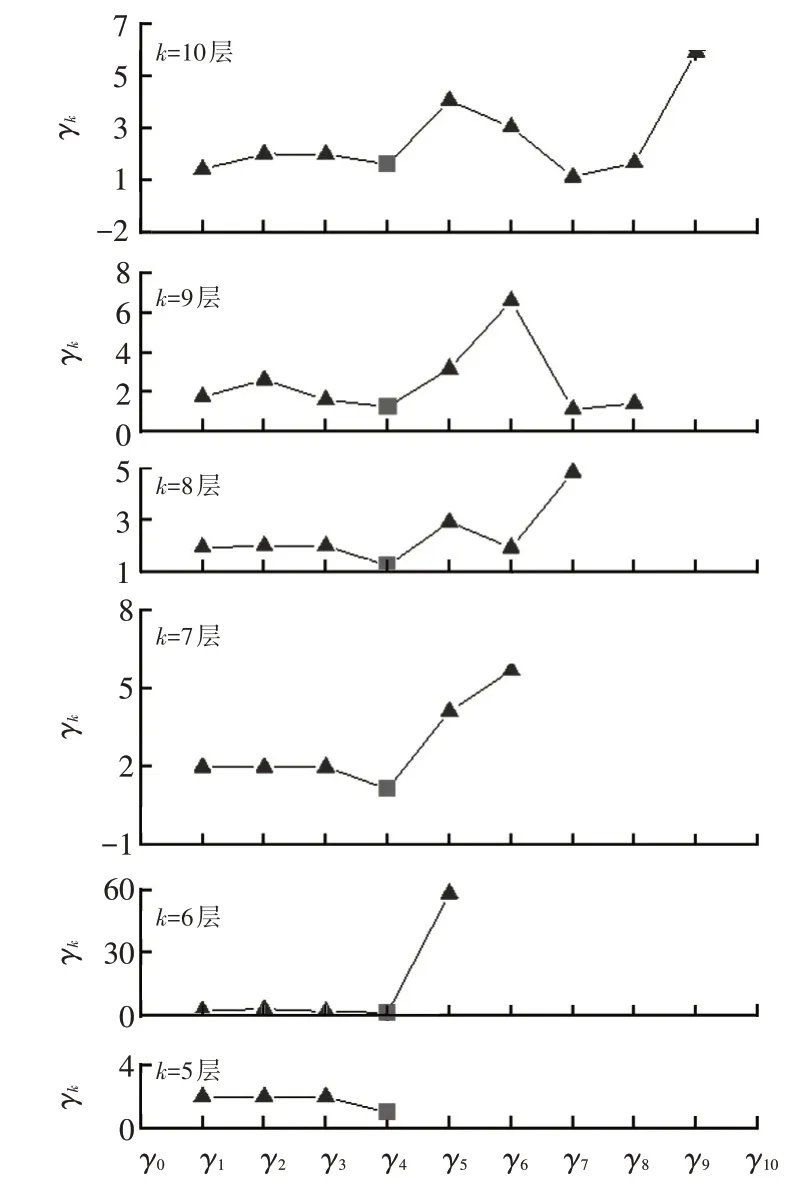
图4 不同VMD参数γk变化趋势对比曲线
电驱动总成在实际运转过程中,由于系统本身、运行工况及外界条件所引起的摩擦、碰撞、冲击造成其振动噪声信号呈非平稳特性[11]。信号的非平稳性导致占优特征值准则的变分模态(Ruled Variational Modal Decomposition,RVMD)在实际应用时依旧会产生模态混叠或假频问题。因此,将分解产生的IMF分量信号进行矩阵重构引入RobustICA 算法进行再次分离,以降低模态混叠及假频现象出现的概率。联合算法模型流程如图5所示。
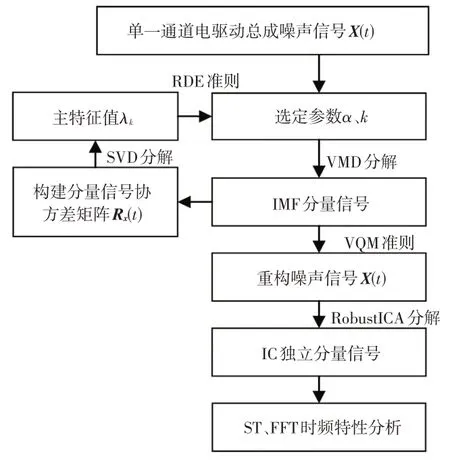
图5 联合算法模型流程
4 电驱动总成噪声试验
4.1 测试平台与测试系统
本文以某乘用车集中一体化电驱动总成为研究对象,在动力传动系统半消声室内进行噪声试验。动力传动系统半消声室技术参数如表2所示。
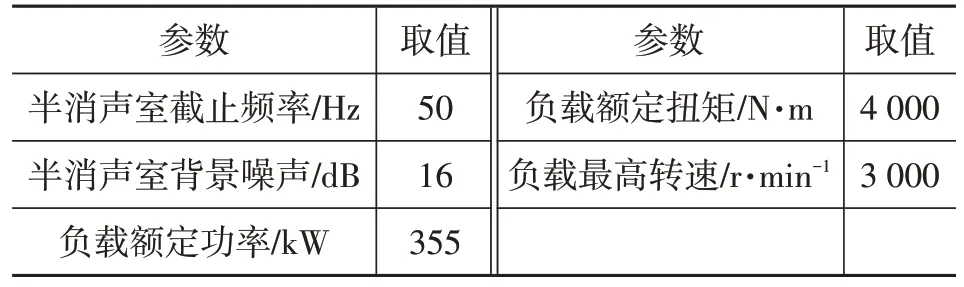
表2 动力传动半消声室技术参数
在本文试验过程中,硬件设备采用LMS 48 通道SCL220 型数据采集前端、GRAS 46AE 声学传感器、KISTLER 8763B050BB加速度传感器、B&K 4231声校准器,噪声数据采集软件系统采用LMS Test.Lab 14A,如图6所示。
4.2 工况选取及测点布置
本文选取较为典型的稳态工况,在扭矩180 N·m(6 000 r∕min)下进行电驱动总成噪声特性分析。试验过程中,在如图7所示的与测试对象近声场外包络面距离1 m的测量面上布置了4个声学传感器,用于采集电驱动总成近声场点噪声信号,采样频率设置为25 600 Hz,频率分辨率为1 Hz。

图7 声学传感器布置
如图8所示,在驱动电机上部、驱动电机端盖、驱动输入轴、减速中间轴、驱动输出轴、减速器下部等测点布置三向振动加速度传感器,带宽设置为12 800 Hz,分辨率为1 Hz。坐标系以电驱动总成到驱动电机端为正Y方向,垂直地面向上为正Z方向,正X方向根据右手定则确定。
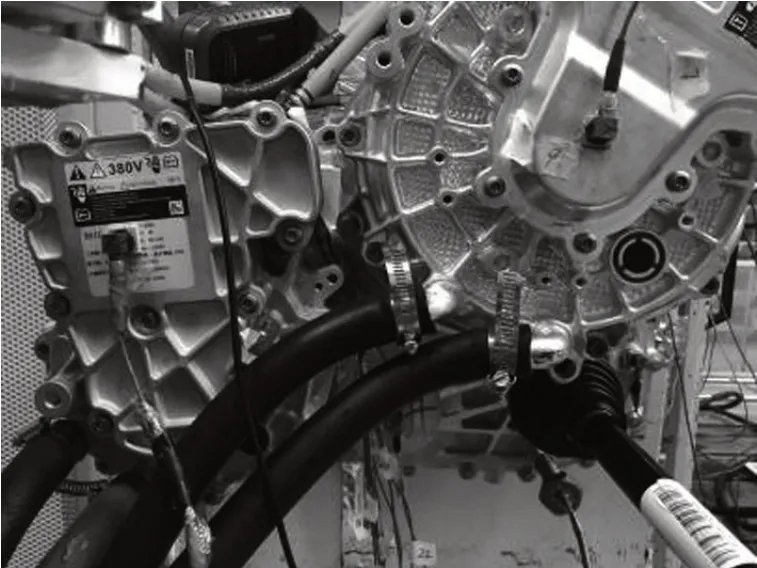
图8 振动加速度传感器布置
5 电驱动总成噪声源分离及识别
试验获取的时域信号长度为13 s,随机选取第7~8 s内近声场测点声学传感器所获取的噪声信号数据进行噪声特性分析。电驱动总成单一通道噪声信号时域特征和频域特性如图9所示。
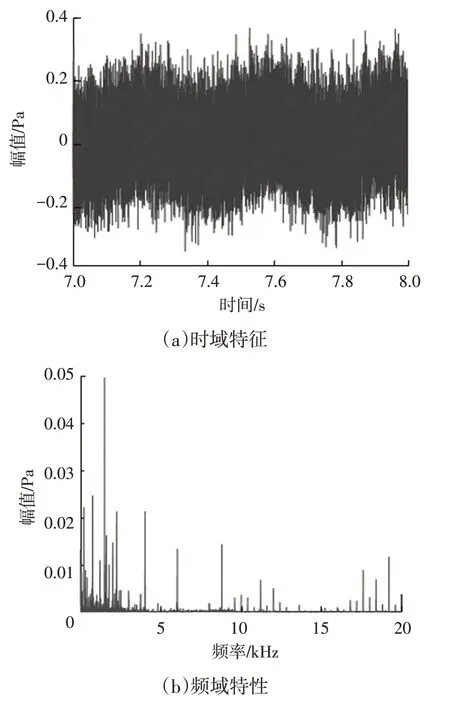
图9 单一通道噪声信号时域特征及频域特性
首先,对数据采集前端采集到的单一通道电驱动总成噪声信号X(t)进行VMD 分解,以α=2 000、k=5 层作为初始参数,分解结束后得到各IMF分量信号。将各本征模态函数重组后求信号协方差矩阵RX(t),对其进行SVD分解后得到各分量所对应的主特征值,利用RDE 准则寻求占优特征值与非占优特征值之间的分界点。依次改变VMD 算法参数赋值并进行反复分解评定,最终确定α=3 000、k=14层。
由图9b 可以看出,15 000 Hz 以上频率信号能量较小,且本文电驱动总成中驱动电机控制器开关频率为10 000 Hz。因此,剔除15 000 Hz以上的IMF信号分量后将其余分量进行重构,得到混合重构观测信号矩阵XX(t)。利用RobustICA算法对重构矩阵再次进行迭代分解,经解耦得到电驱动总成噪声信号的各独立分量。最后,利用ST和FFT方法对各分量进行时频特性分析识别。
如图10 所示,Ci(i=1,2,3,4)分量信号的主要频率成分分别为749 Hz、1 499 Hz、2 244 Hz、2 991 Hz。
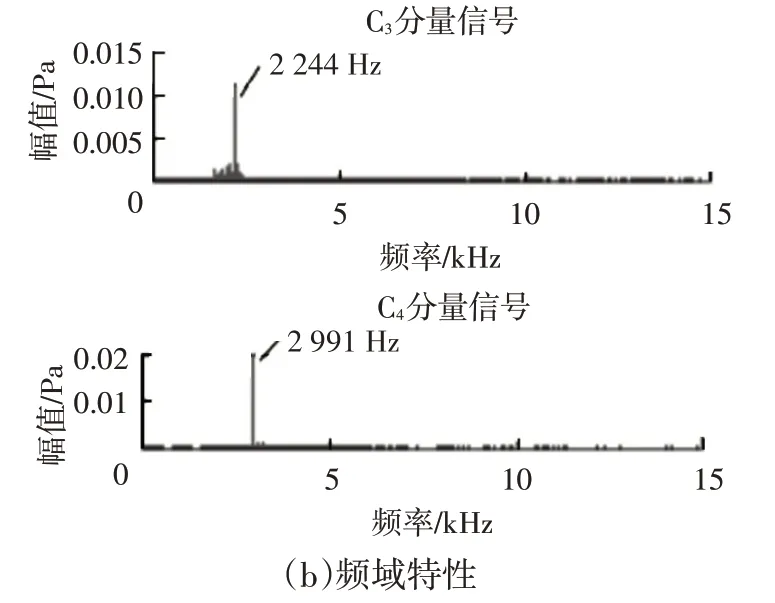
图10 Ci(i=1,2,3,4)分量信号时频域特性
在制造或装配过程中,轮齿的齿廓之间会存在一定偏差,由此产生的位移激励引起齿轮振动、受载变形及各种误差导致轮齿啮合交替过程中产生瞬时啮合冲击。在变工况、变载荷、交替应力等条件下,其传动轴会因不断承受大载荷、长时间的不稳定冲击影响发生故障,而受制造工艺误差与装配精度等限制,传动轴通常存在不对中、不平衡等现象。此时,传动轴的振动噪声特性表现在齿轮上,信号特征频率与转轴频率、啮合频率及其倍频相关。
减速器一级主动齿轮齿数为20,从动齿轮齿数为51;减速器二级主动齿轮齿数为19,从动齿轮齿数为72。可知C1~C4为减速器二级齿轮副啮合频率及其倍频h∙fz(h=1,2,3,4)。4个分量信号均由二级齿副啮合振动引起,对其混合矩阵信号与电驱动总成各测点振动信号进行相干分析。如图11所示,对计算结果对比筛选发现:输出轴+Y向振动信号与混合信号相干系数最大,进而可将C1~C4分量信号与输出轴+Y向振动信号对应。
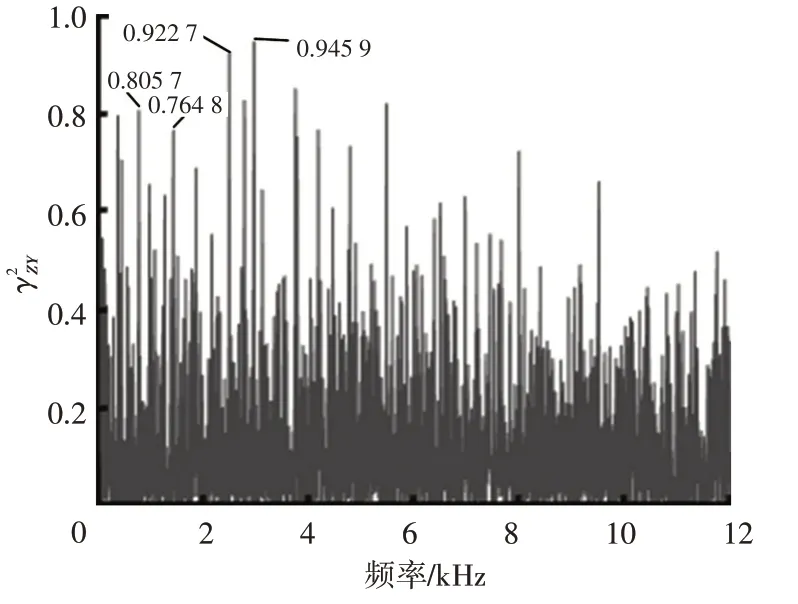
图11 混合信号与输出轴+Y向振动信号相干性
如图12 所示,C5分量信号的频率成分主要集中在6 018 Hz处。由上述齿轮啮合振动噪声相关理论,可知C5为减速器一级齿轮副啮合频率的3倍频。
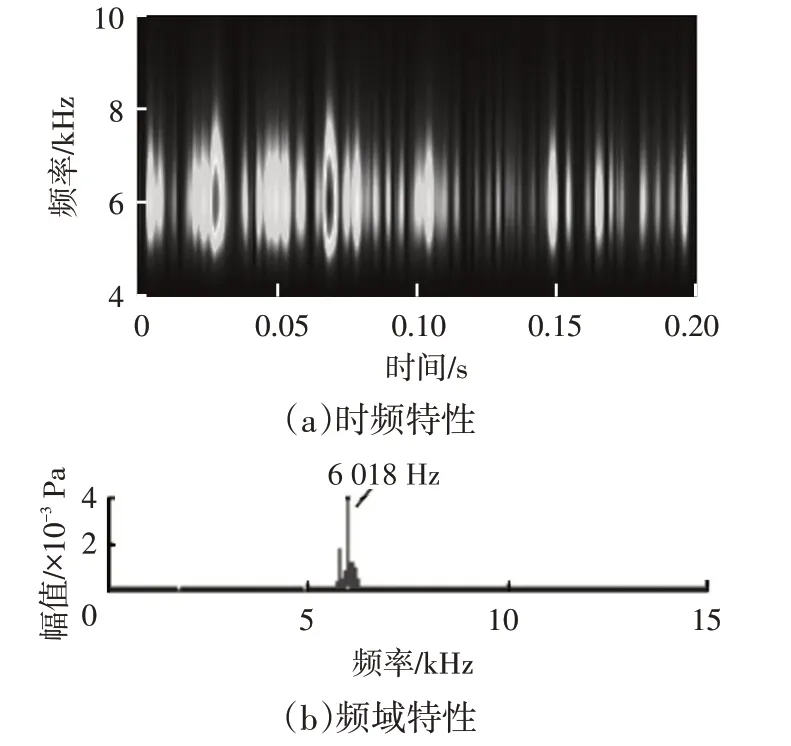
图12 C5分量信号时频特性
对一级齿副啮合频率相关的独立分量混合信号与各测点振动信号进行相干分析。如图13 所示,筛选计算结果发现,中间轴-Y向振动信号与混合信号相干性最强,可将C5分量信号与中间轴-Y向振动信号对应。
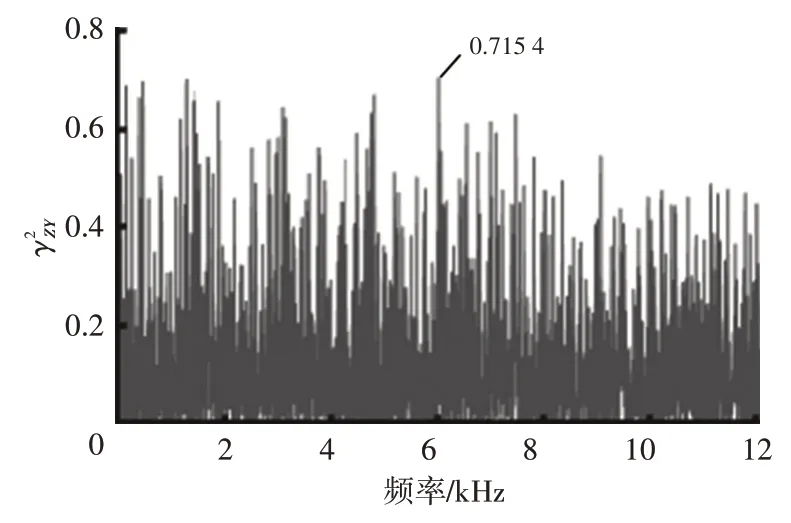
图13 C5与中间轴-Y向振动信号相干性
如图14所示,Ci(i=6,7)分量信号的主要频率分布在2 409 Hz、3 212 Hz处。
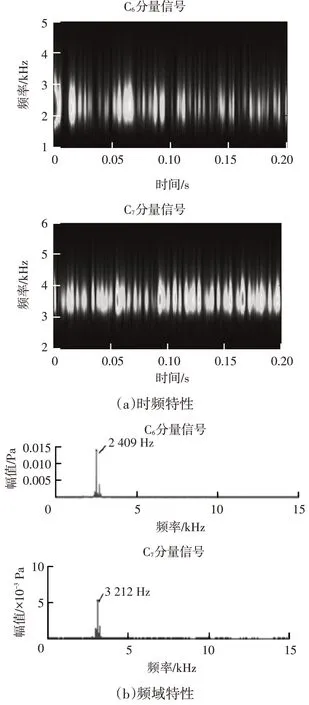
图14 Ci(i=6,7)分量信号时频域特性
电磁噪声是车用永磁同步驱动电机噪声的主要成分,由定、转子气隙磁场产生的电磁交变力作用于定子表面引起[12]。其中电磁切向分量对电机振动噪声影响较小,通常忽略不计且仅考虑径向电磁分量的作用。就电动汽车用整数槽永磁同步驱动电机而言,电磁噪声主要由定、转子高次谐波的相互作用引起。
本文的研究对象电驱动总成所用驱动电机为8 极48槽永磁同步电机,由上述电磁噪声理论可知,C5、C6是电机径向电磁力波引起的电磁噪声。对分量混合信号与各测点振动信号作相干性分析,如图15所示,对比筛选计算结果发现,驱动电机端盖-Y向振动信号与混合信号相干性最好。

图15 混合信号与电机端盖-Y向振动信号相干性
电驱动总成中所用驱动电机控制器开关频率通常为固定不变的常数,输出电流中会引入较多谐波[13],而影响较明显的电流谐波主要分布在一、二倍开关频率处。如图16所示,由上述理论可知,C8分量信号的主要频率是fs=10 000 Hz。
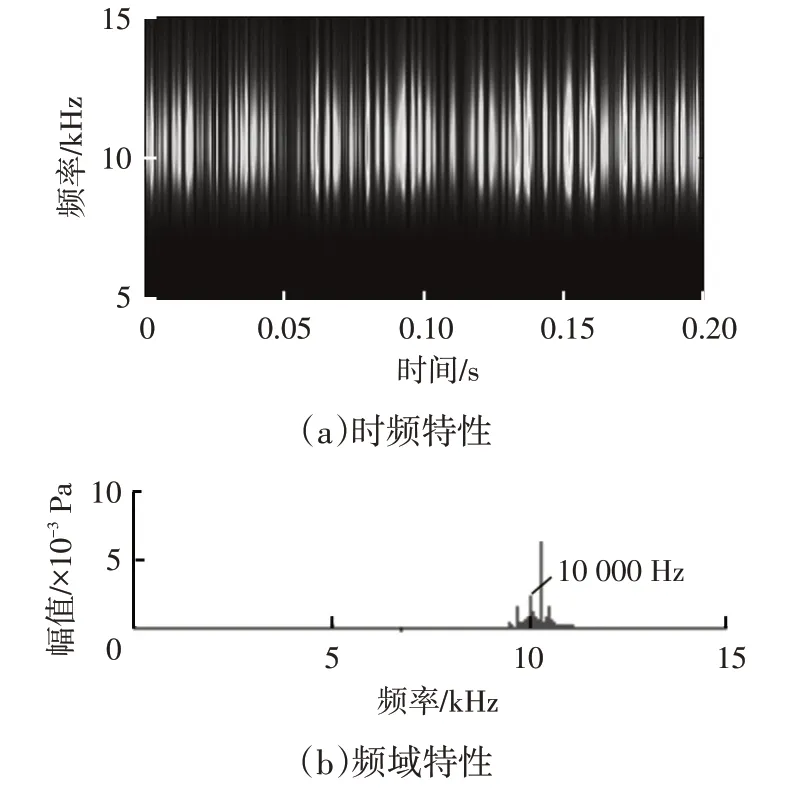
图16 C8分量信号时频特性
对开关频率及其倍频混合信号与各测点振动信号进行相干性分析。如图17 所示,发现驱动电机上部+Z向振动信号与混合信号相干性最好。
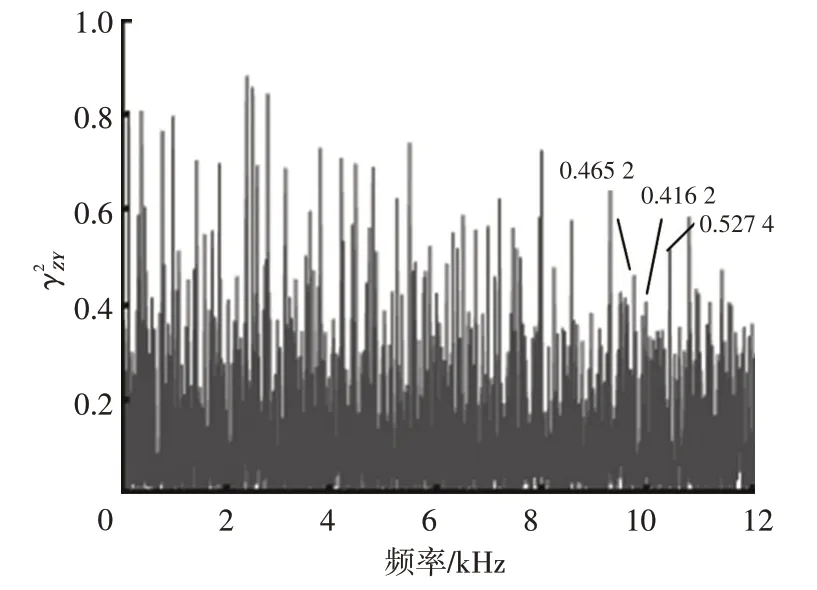
图17 C8分量与驱动电机上部+Z向振动信号相干性
如图18 所示,C9分量信号的主要频率为4 017 Hz。由上述齿轮副啮合振动噪声和电机电磁噪声相关理论可知,C9是时频重叠信号,既可以是减速器一级齿轮副啮合噪声,也可以是驱动电机电磁噪声。

图18 C9分量信号时频特性
对分量信号与各测点振动信号进行相干性分析,观察图19计算结果发现,C9与中间轴-X向振动信号、驱动电机端盖+X向振动信号的相干系数均大于0.5。其中,C9与中间轴-X向振动信号的相干性大于C9与驱动电机端盖+X向振动信号的相干性。
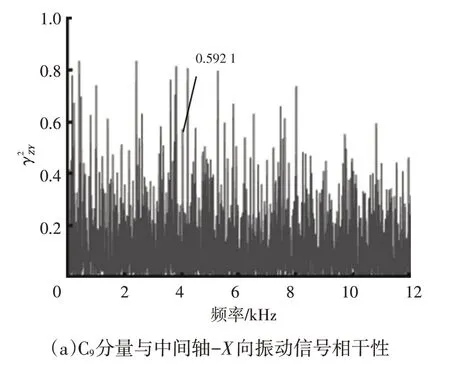
图19 C9分量与中间轴和电机端盖振动信号相干性
本文基于VQM性能评价准则判定电驱动总成源噪声信号与各分量信号之间的波形误差度,VQM越小,表明算法分离效果越好,分量信号波形误差度越小。其表达式为:
式中,S(t)为源混合信号;si(t)为分量信号。
对各IC分量信号与电驱动总成噪声源噪声信号之间的波形误差度进行计算,结果如表3所示。由表3可知,电驱动总成噪声信号中减速器二级齿轮副啮合噪声信号误差度最小,驱动电机电磁噪声信号次之。
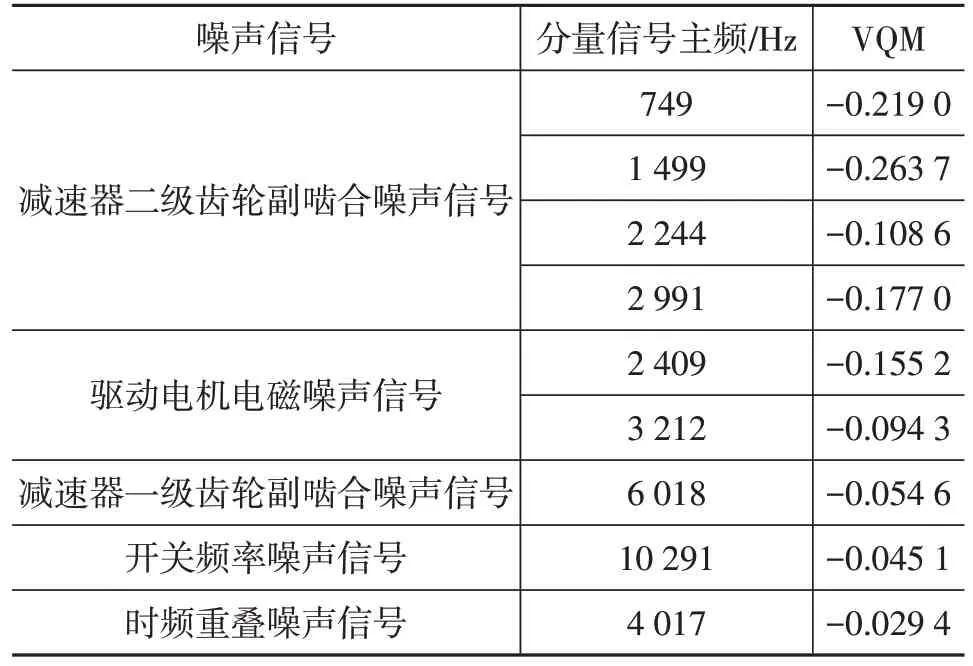
表3 各分量信号VQM
本文在VQM 准则判定基础上,建立单输入单输出线性系统。以振动信号作为系统输入,噪声信号作为系统输出,对算法分离后的各分量信号对应的振动信号与单一通道电驱动总成噪声源信号进行相干分析,结果如图20所示。由图20可知,减速器二级齿轮副啮合振动噪声对电驱动总成噪声贡献度最大,其中2 991 Hz单频相干性达到0.945 9。
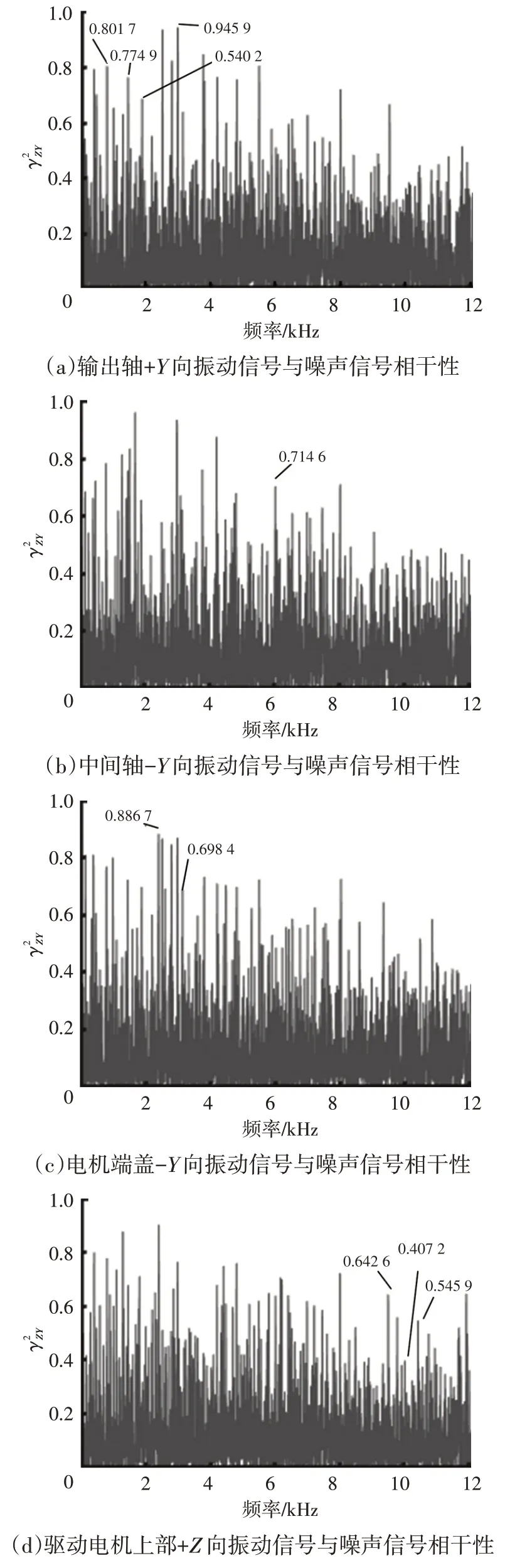
图20 各振动信号与噪声信号相干性
6 结束语
本文通过一系列仿真模拟对比研究及电驱动总成测试信号的分析验证,得出以下结论:
a.基于RDE 对电驱动总成单一通道噪声子空间维数进行估计,为VMD 算法参数设定提供导向性条件约束,可避免分解层数不当所引起的模态混叠现象。
b.在参数设定较合理的前提下,VMD算法性能受噪声影响依旧会产生模态混叠现象,与RobustICA 算法联合应用使算法稳定性更好且性能得到进一步提升。
c.利用ST、FFT方法对各分量信号进行时频特性识别可看出,ST 方法对电驱动总成噪声信号有优良的时频特性识别能力。
d.在利用VQM 对各分量信号波形误差度评定基础上,采用相干分析方法将分量信号与电驱动总成各测点振动信号对应,并与单一通道电驱动总成噪声信号建立单输入单输出线性系统,可知在对应工况下,减速器二级齿轮副啮合振动噪声对电驱动总成噪声贡献度最大,驱动电机电磁噪声贡献度次之。
e.以时频重叠分量信号作为系统输入,电驱动总成各测点振动信号作为系统输出并进行相干性分析,结果表明,时频重叠分量信号由减速器和驱动电机共同作用产生,且减速器一级齿副啮合噪声贡献度大于驱动电机电磁噪声贡献度。
