基于YOLOX的穴盘甘蓝病害检测方法
2023-05-23马驰吴华瑞于会山
马驰 吴华瑞 于会山
摘要:为实现穴盘甘蓝的智能化管理,针对穴盘甘蓝病害识别存在的光照不均匀、对比度低和待检测目标小等问题,研究了基于深度学习的穴盘甘蓝病害检测算法。该算法结合通道空间注意力机制模块,在特征提取模块对特征信息进行重标定,引导模型关注病害区域特征,抑制背景噪声,降低模型漏检率。并采用自适应多尺度特征融合算法提取穴盘甘蓝病害多尺度特征,充分利用不同尺度特征的语义信息提升小目标的检测精确率。由于算法的检测框定位不准确,在回归损失函数中添加了重叠面积损失、中心点距离损失和宽高损失,对回归任务进行了优化,提高穴盘甘蓝病害预测框定位精度;同时引入变焦损失函数作为分类损失函数,利用权重缩放因子缓解模型训练过程中相似病害类间差距小的问题。结果表明,研究算法对穴盘甘蓝炭疽病、细菌性黑斑病、褐斑病、黑腐病的检测平均精确率分别为97.59%、99.70%、98.69%和97.64%;其平均精度均值达到98.41%,与YOLOX、Faster R-CNN、YOLOv3、SSD、CenterNet算法相比,分别提高了4.96、12.86、18.19、4.71、10.69百分点。
关键词:病害检测;穴盘甘蓝;多尺度特征融合;注意力机制;小目标检测
中图分类号:S436.35;TP391.41 文献标志码:A
文章编号:1002-1302(2023)08-0193-10
基金项目:科技创新2030——“新一代人工智能”重大项目(编号:2021ZD0113604);国家现代农业产业技术体系项目(编号:CARS-23-D07)。
作者简介:马 驰(1998—),男,陕西宝鸡人,硕士研究生,主要从事计算机视觉研究。E-mail:2957899957@qq.com。
通信作者:于会山,教授,主要从事信息与信号处理研究。E-mail:13906350692@163.com。
穴盘育苗由于生产成本低、成活率高便于集约化管理,已成为专业化商品苗生产的主要方式。在育苗过程中,细菌性黑斑病、黑腐病、炭疽病、灰霉病、立枯病等病害会严重影响穴盘幼苗存活率和品质[1-2]。对穴盘幼苗病害进行有效检测与防治有利于提高种苗产量与质量,但穴盘幼苗的生长期短、病害部位小,人工检测穴盘幼苗病害效率低,不利于及时防治。随着计算机视觉技术的发展,可以实现蔬菜病害的智能分类和病斑定位,为穴盘幼苗病害检测提供技术支撑。
传统蔬菜病害检测方法是利用机器学习算法分析研究病害图像等数据。党满意等通过融合马铃薯晚疫病颜色特征、纹理特征和形状特征进行病害识别,对晚疫病中期与后期的识别率分别达到90%和92.5%[3]。王献锋等将生长环境作为特征与图像表层特征进行了联合识别,对黄瓜的霜霉病、褐斑病和炭疽病3种叶部病害的识别率高达90%以上[4]。Rahamathunnisa等对蔬菜病害进行了分割,利用支持向量机(SVM)对病害区域进行分类[5]。上述研究通过数字图像处理技术人工提取蔬菜病害特征,并结合机器学习模型进行病害识别。但蔬菜病害表观特征复杂,人工提取的特征分量较少,蔬菜病害识别准确率有限。
近年来,基于深度学习的研究提出了许多蔬菜病害检测与识别算法[6-10]。Zhang等利用EfficientNet和先进的优化器构建了黄瓜类似病害的两分类模型,准确率为96%[11]。Zhao等提出了一種基于残差结构的卷积神经网络,并嵌入了改进的卷积块注意模块,提高了植物叶病的分类,玉米、马铃薯、番茄3种病害的鉴定总体准确率为99.55%[12]。杜忠康等提出了在卷积神经网络中引入多尺度特征融合模块,进行植物叶片病害检测,对番茄叶片病害检测准确率达98.7%[13]。以上研究通过背景简单的数据集进行训练,虽然模型的检测精度较高,但模型适用场景有限。
目前蔬菜病害识别研究主要面向蔬菜生长过程中的病害发生,缺少围绕蔬菜幼苗的病害检测方案。
甘蓝是我国居民消费的重要蔬菜,甘蓝种植面积约90万hm2[14],是大宗蔬菜之一。集约化育种穴盘甘蓝,需要依据环境因素及时管理幼苗,否则甘蓝幼苗会发生病害,不及时医治令成株甘蓝的品质和产量下降,造成大量经济损失。为了实现穴盘甘蓝的智能化管控,本研究以穴盘甘蓝为研究对象,针对穴盘甘蓝病害检测存在的以下问题开展研究:(1)蔬菜病害检测与识别模型大多以成熟期的番茄、黄瓜等为研究对象,对甘蓝病害检测的研究较少;(2)穴盘甘蓝幼苗叶片病害区域较小,且叶片中存在多种病害,病害检测难度大;(3)不同类别病害症状相似,区分困难。
针对以上问题,本研究设计了甘蓝育苗试验,在试验期间采集了炭疽病、细菌性黑斑病、褐斑病、黑腐病4种常见的穴盘甘蓝病害,构建了穴盘甘蓝病害图像数据集。依据穴盘甘蓝病害特点,基于YOLOX模型提出了兼顾精度与速度的穴盘甘蓝病害检测算法。由于穴盘甘蓝病害待检测目标小,因此该算法在特征提取模块结合通道空间注意力机制模块,引导模型关注病害区域,降低模型漏检率。同时,为了减少特征提取模块的计算量,采用轻量级EfficientNet网络作为特征提取网络;并利用自适应多尺度特征融合算法融合穴盘甘蓝病害多尺度特征,提升小目标的检测精确率。回归任务中,预测框存在定位不准确问题,在回归损失函数中添加了重叠面积损失、中心点距离损失和宽高损失,提高穴盘甘蓝病害预测框定位精度;同时,在目标分类任务中,引入焦点损失函数作为分类损失函数,利用权重缩放因子缓解模型训练过程中相似病害类间差距小的问题。
1 数据集描述
1.1 数据采集
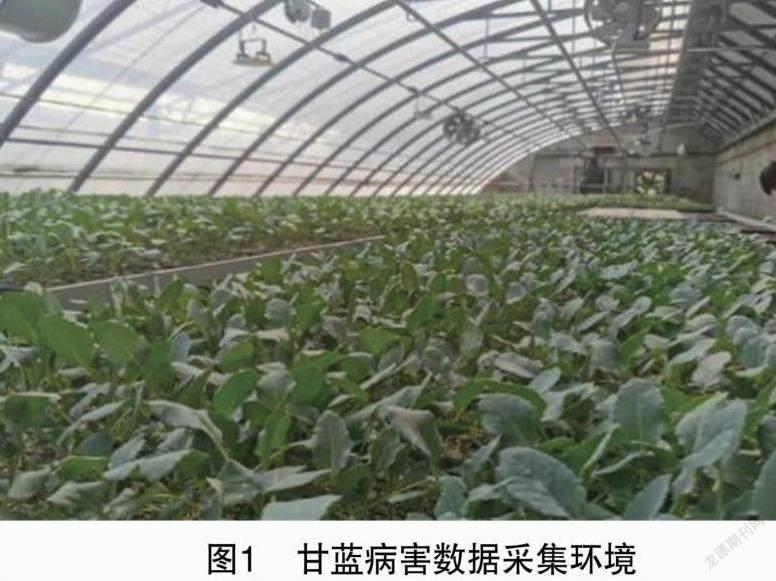
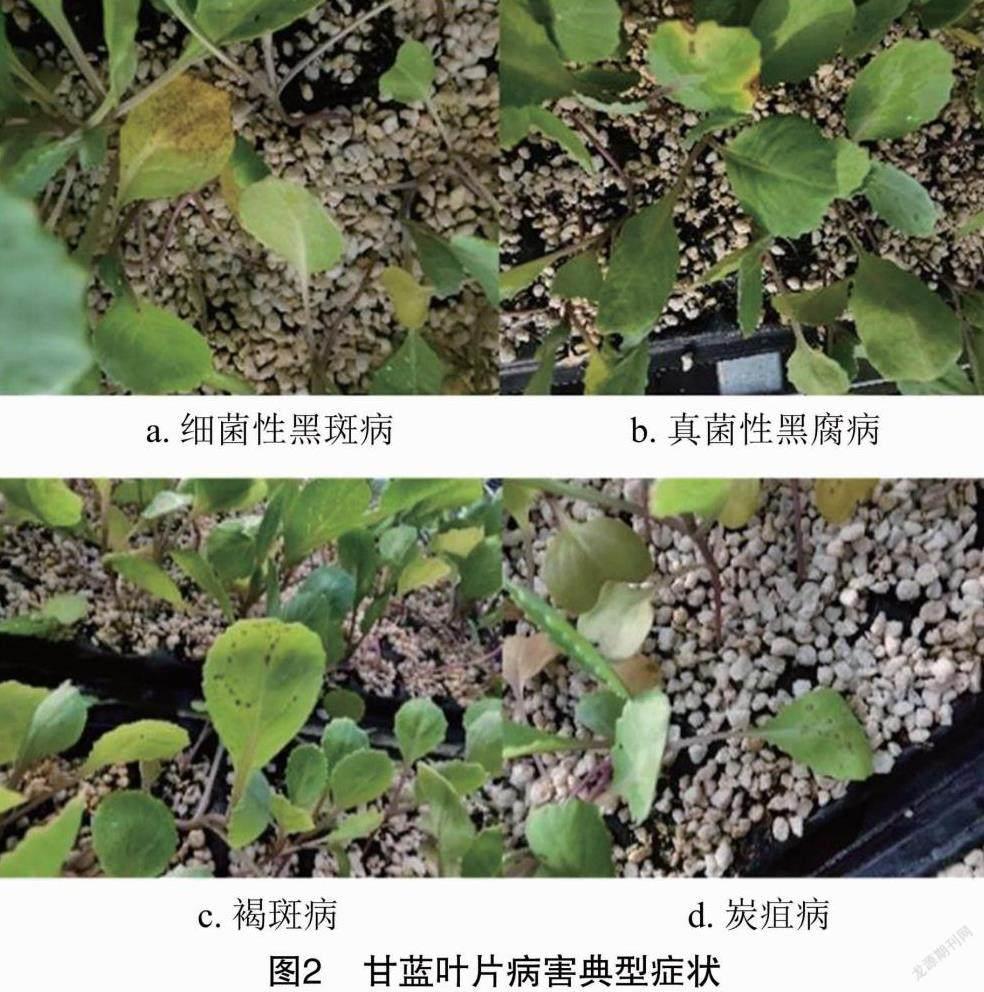
于北京市昌平区小汤山国家精准农业研究基地2号温室大棚内开展甘蓝幼苗育种试验。如图1所示,采用穴盘育苗方式培育甘蓝幼苗,令其满足移栽标准。播种甘蓝种子到满足移栽标准的周期为45 d,试验时间为2021年11月1日至12月15日,试验数据主要采集已经生长2张真叶的甘蓝幼苗病害图像。采集不同时间段内的穴盘甘蓝病害图像,共1 968张。甘蓝幼苗炭疽病叶片发病叶片上产生水浸状褐色小斑点,中间白色或灰白色;甘蓝幼苗细菌性黑斑病叶片初生油浸状密集小斑点,扩展后呈不规则形或圆形,褐色或黑褐色,边缘紫褐色;甘蓝幼苗褐斑病下部老叶先发病,在叶片正面或背面生圆形或近圆形的密集或者单个病斑,褐色至黑褐色,斑点可能穿透叶面;甘蓝幼苗黑腐病叶片染病,叶缘出现黄色病变,呈“V”字形病斑,发展后叶脉变黑。炭疽病、细菌性黑斑病、褐斑病、黑腐病4种病害典型症状如图2所示。
1.2 数据预处理
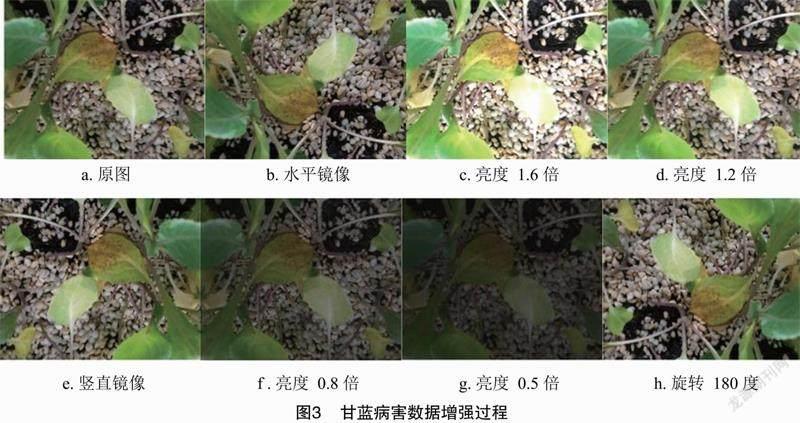
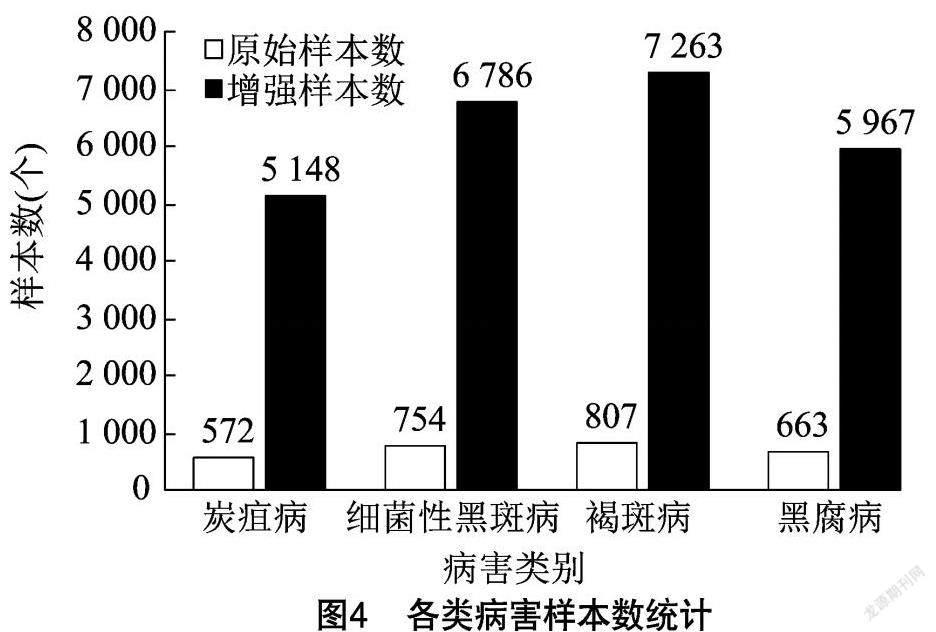
本研究数据集存储使用VOC2007格式,利用开源软件LabelImg标注1 968张穴盘甘蓝病害图像,其中炭疽病和褐斑病发病范围较小,发病面积占总面积的比例小于3%。通过旋转、镜像、增加亮度、减少亮度等方式增强病害图像,提高了穴盘甘蓝病害检测模型的泛化能力。具体过程如图3所示。图像扩充后,共计17 712张RGB病害图像。穴盘甘蓝病害数据集训练集、测试集、验证集的数量比例为8 ∶1 ∶1。各类病害具体样本数量如图4所示。
2 模型设计
2.1 基础模型
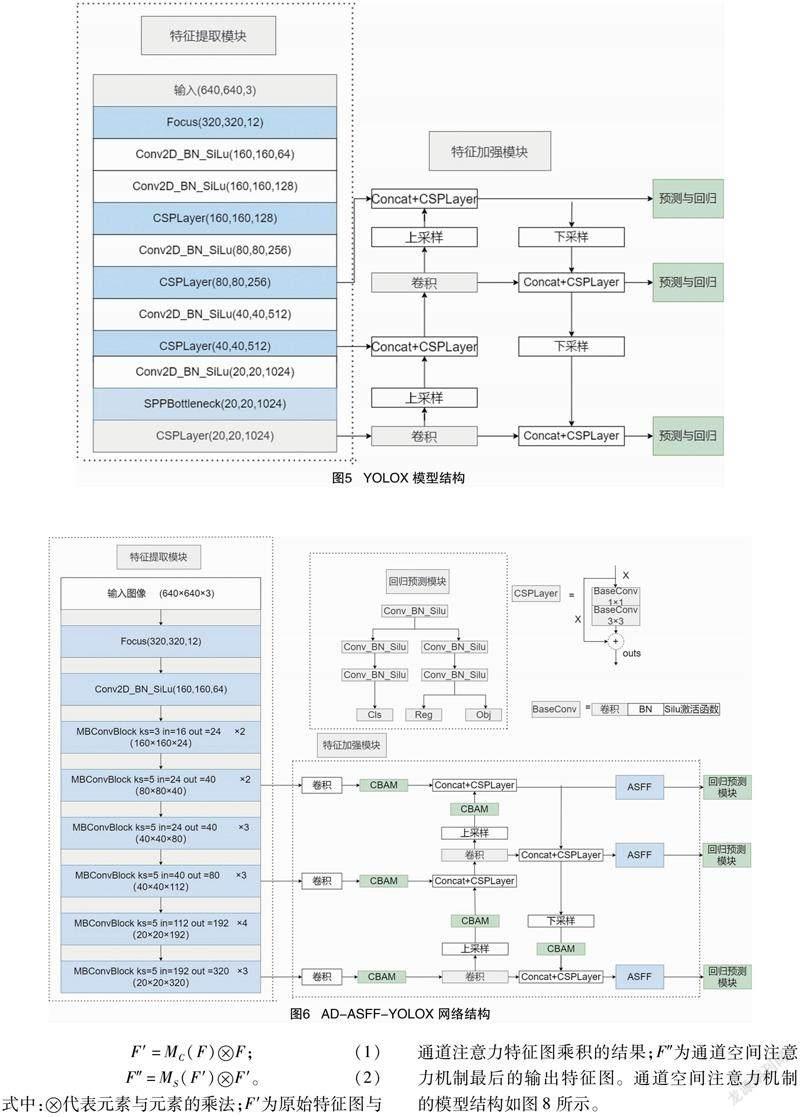
YOLOX算法[15-16]是YOLO系列最新的一阶段目标检测算法,其核心思想是将图像作为检测识别网络输入,直接在输出层完成目标的位置定位和分类。YOLOX算法包括输入端、特征提取模块、加强特征提取模块和输出端,结构图如图5所示。
YOLOX算法通过构建CSP模块解决了梯度消失问题,但在穴盘甘蓝病害检测场景下,仍存在不同尺度特征的语义信息利用不充分、小目标检测精度低、模型特征提取模块参数多等问题。
2.2 改进的YOLOX算法:AD-ASFF-YOLOX
针对穴盘甘蓝病害图像病害区域小、不同病害类别之间症状相似等问题,本研究基于YOLOX算法提出了穴盘甘蓝病害检测模型(AD-ASFF-YOLOX),其结构如图6所示。与YOLOX不同的是:(1)在特征提取模块使用了轻量级EfficientNet网络,通过不同卷积方式减少模型参数的计算量;(2)特征提取模块结合通道空间注意力机制模块提取病害特征,引导模型关注病害,抑制背景,降低模型漏检率;(3)采用自适应多尺度特征融合算法提取穴盘甘蓝病害多尺度特征,充分利用不同尺度特征的语义信息提升病害检测精确率;(4)在回归任务的损失函数中添加了重叠面积损失、中心点距离损失和宽高损失,提高穴盘甘蓝病害预测框定位精度;(5)在分类任务中,引入变焦损失函数作为分类损失函数,利用权重缩放因子缓解模型训练过程中相似病害类间差距小的问题。
2.2.1 轻量级特征提取网络EfficientNet
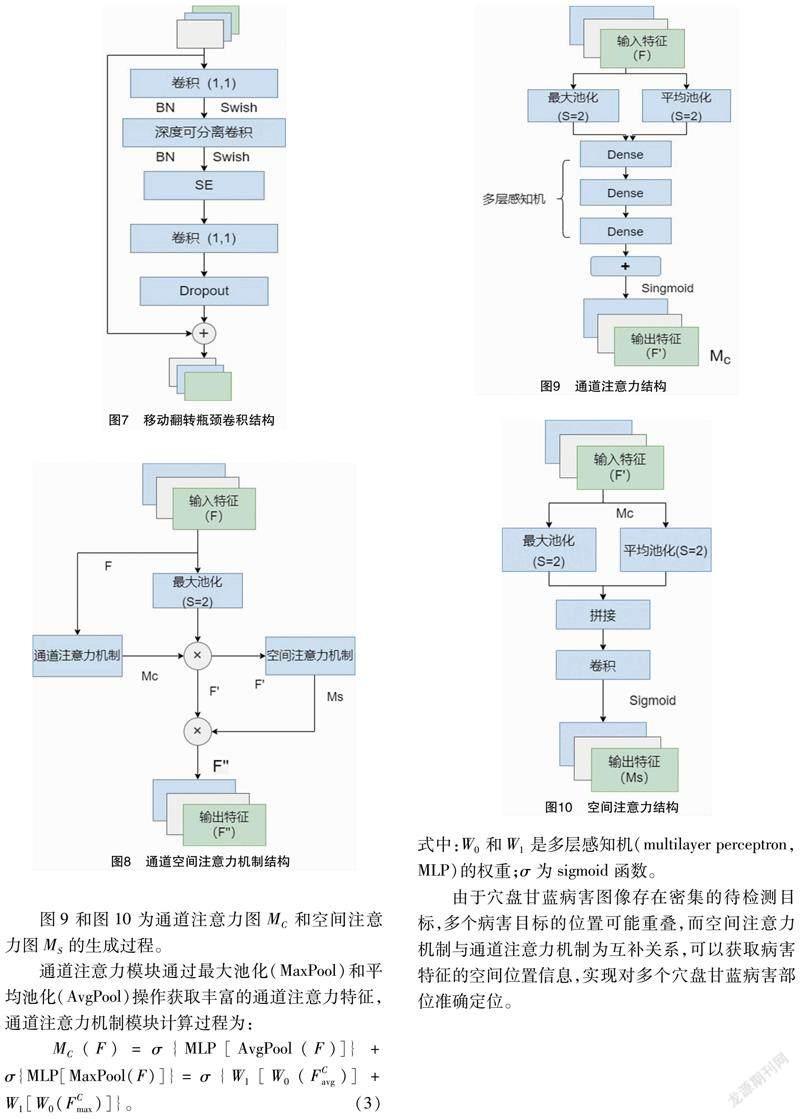
在特征提取过程中,为了减少模型参数,引入轻量级EfficientNet[17-18]為主干特征提取网络。EfficientNet特征提取网络对网络模型的深度(网络的层数)、宽度(特征图的通道数)和图像分辨率按照固定的缩放系数进行缩放,特征图利用上采样将输入升维,并在多个轻量翻转瓶颈卷积核模块中进一步实现高效特征提取,MBConv结合深度可分离卷积模块和注意力机制模块,移动翻转瓶颈卷积结构如图7所示。EfficientNet网络将标准卷积分解成逐通道卷积和逐点卷积减少计算量,从而提升模型的检测速度。
2.2.2 嵌入通道空间注意力机制模块
穴盘甘蓝病害检测模型在特征提取过程中,图像在经过改变大小和卷积操作之后,待检测特征会变得模糊、形变甚至会丢失。因此,本研究在穴盘甘蓝病害检测模型的特征提取模块中添加了注意力机制模块,选择性地强调穴盘甘蓝病害特征并实现特征精准定位。
通道空间注意力机制[19]将输入的特征图F∈RC×H×W,分别输入通道注意力模块和空间注意力模块,依次推断出一维的通道注意力图MC∈RC×1×1和二维空间注意力图MS∈R1×H×W,其中C、W和H分别代表特征图的通道数、宽和高。通道空间注意力机制总的实现过程可以概括为:
图9和图10为通道注意力图MC和空间注意力图MS的生成过程。
通道注意力模块通过最大池化(MaxPool)和平均池化(AvgPool)操作获取丰富的通道注意力特征,通道注意力机制模块计算过程为:
式中:W0和W1是多层感知机(multilayer perceptron,MLP)的权重;σ为sigmoid函数。
由于穴盘甘蓝病害图像存在密集的待检测目标,多个病害目标的位置可能重叠,而空间注意力机制与通道注意力机制为互补关系,可以获取病害特征的空间位置信息,实现对多个穴盘甘蓝病害部位准确定位。
获得空间位置信息的过程如下,空间注意力机制模块使用最大池化和平均池化方法聚合通道注意力图MC的通道信息,生成最大池化特征和平均池化特征,然后将2个特征进行拼接并通过卷积操作生成二维的空间注意力特征图MS。
式中:σ为sigmoid函数;f7×7为卷积操作。
2.2.3 自适应多尺度特征融合算法
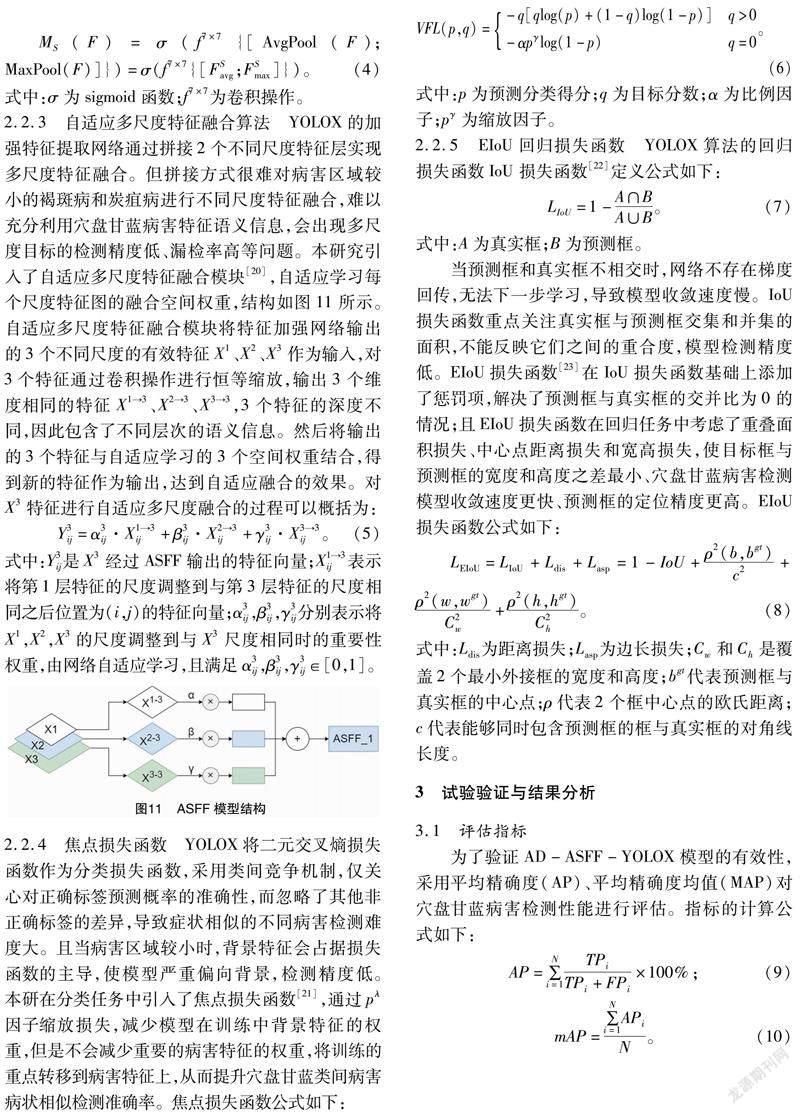
YOLOX的加强特征提取网络通过拼接2个不同尺度特征层实现多尺度特征融合。但拼接方式很难对病害区域较小的褐斑病和炭疽病进行不同尺度特征融合,难以充分利用穴盘甘蓝病害特征语义信息,会出现多尺度目标的检测精度低、漏检率高等问题。本研究引入了自适应多尺度特征融合模块[20],自适应学习每个尺度特征图的融合空间权重,结构如图11所示。自适应多尺度特征融合模块将特征加强网络输出的3个不同尺度的有效特征X1、X2、X3作为输入,对3个特征通过卷积操作进行恒等缩放,输出3个维度相同的特征X1→3、X2→3、X3→3,3个特征的深度不同,因此包含了不同层次的语义信息。然后将输出的3个特征与自适应学习的3个空间权重结合,得到新的特征作为输出,达到自适应融合的效果。对X3特征进行自适应多尺度融合的过程可以概括为:
式中:Y3ij是X3经过ASFF输出的特征向量;X1→3ij表示将第1层特征的尺度调整到与第3层特征的尺度相同之后位置为(i,j)的特征向量;α3ij,β3ij,γ3ij分别表示将X1,X2,X3的尺度调整到与X3尺度相同时的重要性权重,由网络自适应学习,且满足α3ij,β3ij,γ3ij∈[0,1]。
2.2.4 焦点损失函数
YOLOX将二元交叉熵损失函数作为分类损失函数,采用类间竞争机制,仅关心对正确标签预测概率的准确性,而忽略了其他非正确标签的差异,导致症状相似的不同病害检测难度大。且当病害区域较小时,背景特征会占据损失函数的主导,使模型严重偏向背景,检测精度低。本研在分类任务中引入了焦点损失函数[21],通过pλ因子缩放损失,减少模型在训练中背景特征的权重,但是不会减少重要的病害特征的权重,将训练的重点转移到病害特征上,从而提升穴盘甘蓝类间病害病状相似检测准确率。焦点损失函数公式如下:
式中:p为预测分类得分;q为目标分数;α为比例因子;pγ为缩放因子。
2.2.5 EIoU回归损失函数
YOLOX算法的回归损失函数IoU 损失函数[22]定义公式如下:
式中:A为真实框;B为预测框。
当预测框和真实框不相交时,网络不存在梯度回传,无法下一步学习,导致模型收敛速度慢。IoU损失函数重点关注真实框与预测框交集和并集的面积,不能反映它们之间的重合度,模型检测精度低。EIoU损失函数[23]在IoU损失函数基础上添加了惩罚项,解决了预测框与真实框的交并比为0的情况;且EIoU损失函数在回归任务中考虑了重叠面积损失、中心点距离损失和宽高损失,使目标框与预测框的宽度和高度之差最小、穴盘甘蓝病害检测模型收敛速度更快、预测框的定位精度更高。EIoU损失函数公式如下:
式中:Ldis为距离损失;Lasp为边长损失;Cw和Ch是覆盖2个最小外接框的宽度和高度;bgt代表预测框与真实框的中心点;ρ代表2个框中心点的欧氏距离;c代表能够同时包含预测框的框与真实框的对角线长度。
3 试验验证与结果分析
3.1 评估指标
为了验证AD-ASFF-YOLOX模型的有效性,采用平均精确度(AP)、平均精确度均值(MAP)对穴盘甘蓝病害检测性能进行评估。指标的计算公式如下:
式中:TP代表识别甘蓝病害正确的数量;FP代表背景被錯误识别为病害的数量;TPi代表预测第i类甘蓝病害正确的数量;FPi代表预测第i类甘蓝病害样本错误的数量;N代表甘蓝病害的种类总数。AP值和mAP值越接近1,表明模型的性能越好。
3.2 试验环境
本研究所有的试验环境都在操作系统Ubuntu 18.0下进行,处理器为11th Gen Intel CoreTM i7-11800H,显卡为NVIDIA GeForce RTX 3050 Ti Laptop,使用pytorch深度学习框架,训练过程中所有模型的批大小设置为8。所有对照试验网络模型迭代次数为100轮。
3.3 试验结果与分析
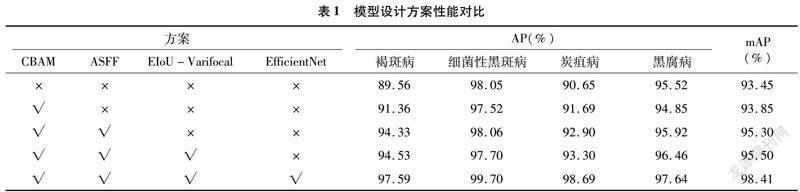
3.3.1 消融试验性能对比
为了验证AD-ASFF-YOLOX算法对穴盘甘蓝病害检测的有效性,以YOLOX算法为基础,为AD-ASFF-YOLOX算法设计了消融试验。表1为5组模型对穴盘甘蓝病害检测的性能数据对比。(1)在YOLOX的特征提取模块引入注意力机制模块,模型对病害特征信息进行重标定,更关注病害信息。改进后模型对炭疽病和褐斑病的检测平均精确率分别提升了1.04百分点和1.8百分点,平均精确度均值提升了0.4百分点。(2)在此基础上采用了自适应多尺度融合模块,模型能够充分利用不同尺度特征的语义信息,较大地提升了病害检测模型的平均精确率和平均精确度均值,平均精确度均值比之前提升了1.45百分点。(3)在输出层,采用了EIoU损失函数对回归任务进行了优化,提升了预测框的定位准确率;同时引入变焦损失函数作为分类损失函数,模型考虑了不同种类病害之间差距问题,提升了类间差距小的检测准确率。平均精确度均值比之前提高了0.2百分点。(4)使用EfficientNet作为特征提取网络,通过固定缩放系数对网络深度、分辨率和通道数进行调整,结合通道空间注意力机制模块和自适应多尺度特征融合模块,提高了模型的平均检测精确率。试验表明,改进后的穴盘甘蓝检测算法 AD-ASFF-YOLOX对炭疽病、细菌性黑斑病、褐斑病、黑腐病的平均检测精确率比之前分别提升了5.39、2.00、3.06和1.18百分点,平均精确度均值提高了2.91百分点。说明了网络模型改进后,在学习的过程中,会区分穴盘甘蓝病害区域与背景区域、考虑不同种类穴盘甘蓝病害之间的差别;网络模型在不断的迭代中,使模型对穴盘甘蓝病害检测具有更好的性能。
3.3.2 检测效果对比试验
为了进一步验证AD-ASFF-YOLOX模型的检测效果,本研究提出从置信度、小目标病害检测效果和密集目标检测效果3个角度对穴盘甘蓝病害的检测效果进行评价,并与YOLOX算法进行对比。
3.3.2.1 置信度对比试验
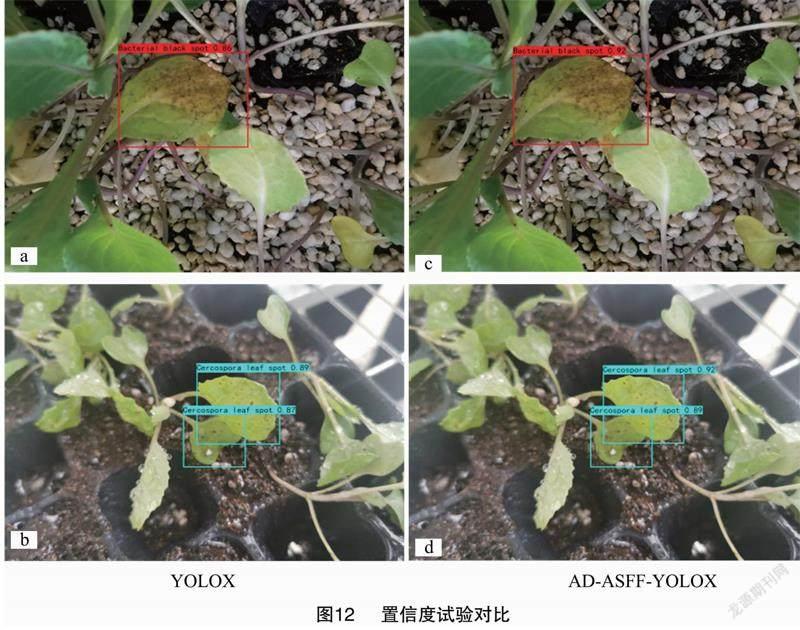
随机在穴盘甘蓝病害测试数据集中,选取含有少量病害和较多数量病害图片,使用YOLOX和AD-ASFF-YOLOX进行测试,结果如图12所示。
图12-a中病害为细菌性黑斑病;图12-b中病害为褐斑病,病害数量较多;图12-c中AD-ASFF-YOLOX模型检测出细菌性黑斑病的置信度为92%,高于YOLOX模型的86%;图12-d中 AD-ASFF-YOLOX检测出褐斑病的2个位置的置信度分别为92%和89%,高于YOLOX的89%和87%。置信度越大代表预测框中包含物体的概率越大、学习穴盘甘蓝病害特征的语义信息更多。而病害的语义信息需要在检测模型的特征提取模块和多尺度特征融合模块中获取,所以AD-ASFF-YOLOX算法能够获得更好的检测效果。
3.3.2.2 小目标病害检测试验
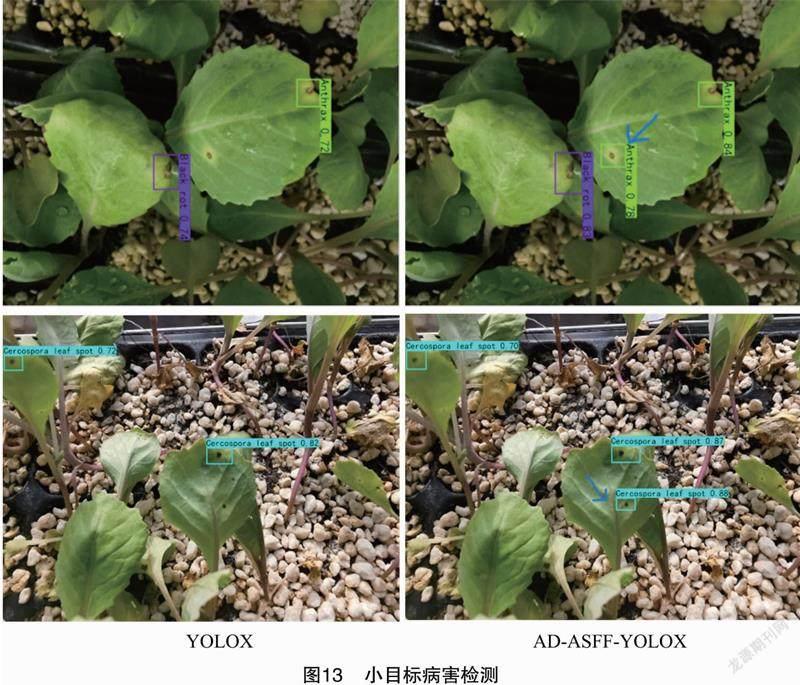
YOLO系列算法是一阶段目标检测算法,其对小目标的检测效果不佳,而穴盘甘蓝病害区域较小,为了验证AD-ASFF-YOLOX对小目标的检测效果,在测试集穴盘甘蓝病害图像中挑选病害区域小的炭疽病、褐斑病和早期的黑腐病。使用YOLOX算法和AD-ASFF-YOLOX分别进行检测,检测结果如图13所示。
如图13所示,YOLOX对小目标的甘蓝病害进行检测时会发生漏检的情况,是因为模型在对图像特征进行提取时,下采样操作会导致特征发生形变或者丢失。通过引入通道空间注意力机制和变焦损失函数可以使模型对特征信息重标定,使病害区域特征的权重更高,忽略背景特征,从而改善了模型对小目标检测的性能。
3.3.2.3 密集病害检测试验
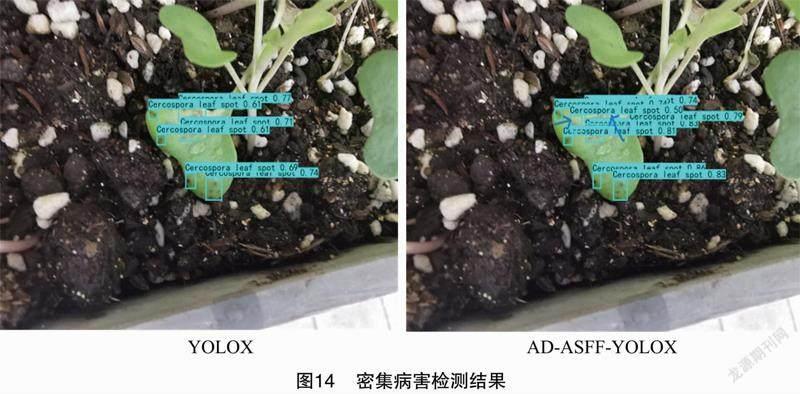
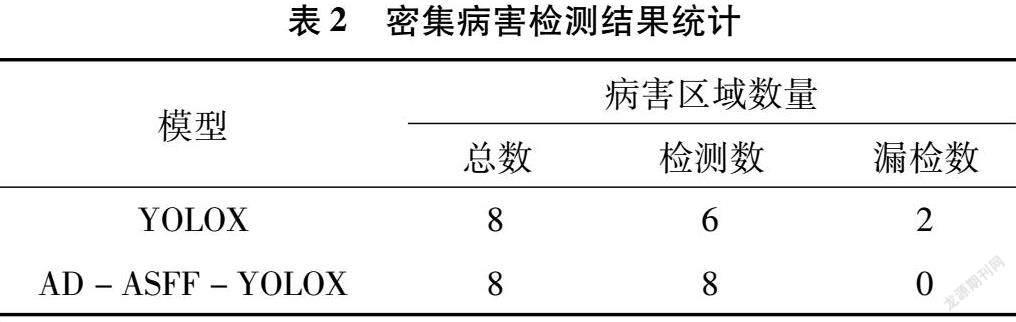
在穴盘甘蓝病害图像中,叶片存在多种病害,发病区域小且密集,人为检测容易漏检,而利用计算机视觉可以提升穴盘甘蓝病害检测的准确率,且减少了对密集病害的漏检率。随机在测试集中选取密集病害图像,使用YOLOX和 AD-ASFF-YOLOX进行检测,结果如图14所示。
从图14中观察到,在幼苗病害图像分辨率低和病害区域密集的情况下,YOLOX会发生漏检的情况,未检测的区域在AD-ASFF-YOLOX的检测图已标记。AD-ASFF-YOLOX模型通过通道空间注意力机制模块对融合特征按权重重新进行排列,高权值特征通道的特征会更加显著,密集区域可能出现部分重叠,但是该区域特征权重较高,而不会被漏检(表2)。因此通过对YOLOX算法的有效改进,明显增加了AD-ASFF-YOLOX的密集病害检测能力。
3.3.3 对比试验分析
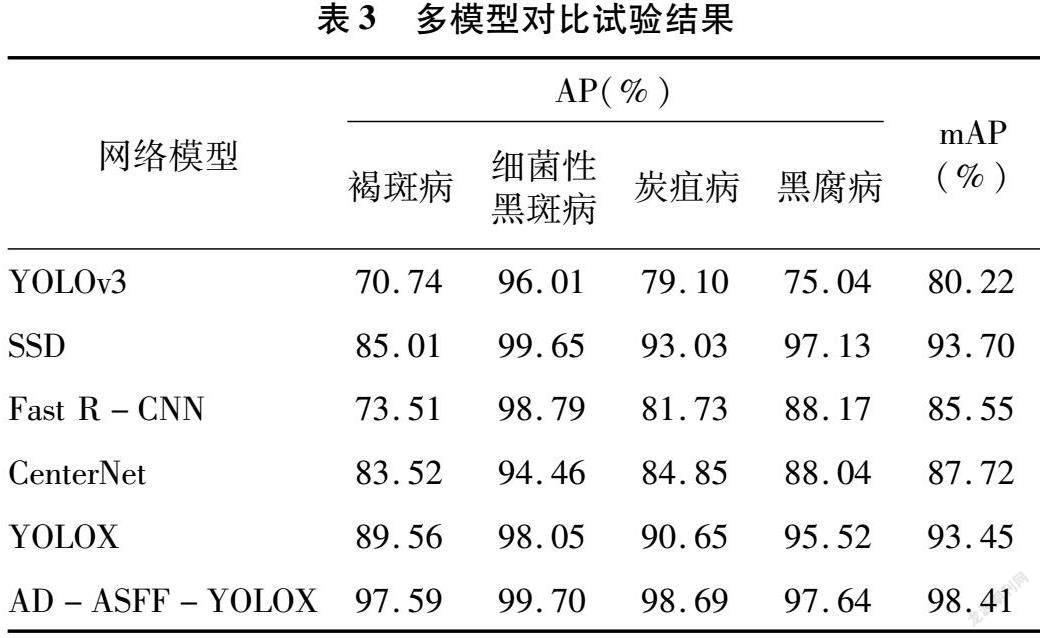
以炭疽病、细菌性黑斑病、褐斑病、黑腐病4种类型的穴盘甘蓝病害作为检测的对象。本研究使用现有成熟的基于深度学习的目标检测算法(YOLOX、YOLOv3、CenterNet、SSD、Fast R-CNN和AD-ASFF-YOLOX)进行甘蓝病检测,并且比较了这些检测模型对穴盘甘蓝病害检测的平均精确率。模型的验证集准确率对比效果如表3所示,从多种模型的检测效果来看,以上检测模型都能取得理想效果。
由表3可得,针对穴盘甘蓝的病害检测任务,基于深度学习算法(YOLOv3、SSD、Fast R-CNN、CenterNet、YOLOX) 的检测准确率较高,验证集的平均精確率均值分别为80.22%、93.70%、85.55%、87.72%、93.45%。虽然这些算法检测精确率较高,但仍不能针对性地满足穴盘甘蓝病害图像的高精度检测要求。因为穴盘甘蓝的褐斑病和炭疽病待检测的病害区域较小,较难精准识别。本研究的AD-ASFF-YOLOX 模型对病害面积较小的褐斑病和炭疽病的穴盘甘蓝的误识率更低,其中褐斑病、细菌性黑斑病、炭疽病和黑腐病较原模型YOLOX的平均精确率分别提升了8.03、1.65、8.04、2.12百分点,平均精确度均值提升了4.96百分点。因此,AD-ASFF-YOLOX模型能有效区分不同病害之间细微差距的小目标检测,对穴盘甘蓝病害检测有较好的表现。
3.3.4 多模型性能对比试验
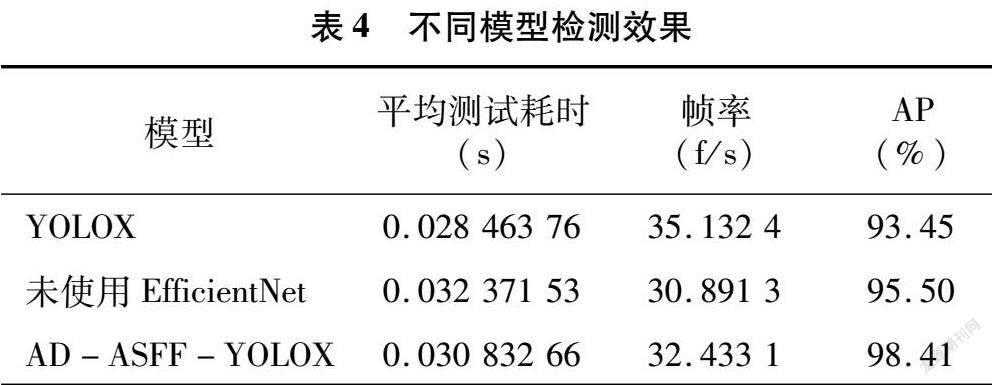
在实际应用中,模型的检测效率对检测任务也有很大的影响。表4为基础模型YOLOX、改进后的模型AD-ASFF-YOLOX模型和未添加EfficientNet模块的改进算法对甘蓝幼苗病害检测任务的平均测试耗时、帧率(f/s)和平均精确率。
AD-ASFF-YOLOX模型与原始的YOLOX 模型的检测平均耗时相比增加了0.002 368 9 s,平均精确率提升了4.96百分点。 AD-ASFF-YOLOX与未使用EfficientNet模快的AD-ASFF-YOLOX模型相比检测平均耗时降低了0.001 538 87 s,提升了模型的检测速度,同时使模型的平均检测精确率提升了2.91百分点。以上可以说明模型使用轻量级特征提取模块EfficientNet可以较小地提升模型的检测速度和平均精确率。
4 结论
本研究以穴盘甘蓝病害图像为研究对象,在温室大棚进行了数据采集。首先,针对自然环境条件下病害图像存在的光照分布不均匀、对比度低等问题,对病害图像进行了数据增强,增加模型的鲁棒性和泛化能力;针对病害图像背景复杂和待检测目标小的问题,引入了注意力机制模块和自适应多尺度特征融合模块。其次,引入了EIoU 损失函数和变焦损失函数,提升了预测框的定位精度。AD-ASFF-YOLOX 相比于其他检测算法(Faster R-CNN、YOLOv3、SSD、Centernet)对穴盘甘蓝褐斑病、细菌性黑斑病、炭疽病和黑腐病的平均检测精确率均有提升,AD-ASFF-YOLOX的平均精确度均值为98.41%,比原始的YOLOX算法提升了4.96百分点,能够适应复杂自然环境,为植物类病害检测提供了研究基础,具有重要理论价值和实际意义。
由于本研究采集的穴盘甘蓝病害种类较少,在下一步研究过程中,需要采集更多种类的穴盘甘蓝病害图像,扩大模型的适用范围;对ASFF-AD-YOLOX模型进一步改进,提升模型检测与识别的准确率和检测速度。
参考文献:
[1]陈茂春. 甘蓝类蔬菜常见病害的防治[J]. 农村实用技术,2015(10):36-38.
[2]吕颖华. 3种甘蓝病害的症状识别与防治技术[J]. 乡村科技,2018(21):108-109.
[3]党满意,孟庆魁,谷 芳,等. 基于机器视觉的马铃薯晚疫病快速识别[J]. 农业工程学报,2020,36(2):193-200.
[4]王献锋,张善文,王 震,等. 基于叶片图像和环境信息的黄瓜病害识别方法[J]. 农业工程学报,2014,30(14):148-153.
[5]Rahamathunnisa U,Nallakaruppan M K,Anith A,et al. Vegetable disease detection using K-means clustering and SVM[C]//2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS). Coimbatore,India:IEEE,2020:1308-1311.
[6]岳有军,刘杰琼,王红君,等. 基于改进YOLOv3模型的苹果树叶片病斑检测[J]. 中国科技论文,2021,16(11):1202-1208.
[7]Nagaraju M,Chawla P. Systematic review of deep learning techniques in plant disease detection[J]. International Journal of System Assurance Engineering and Management,2020,11(3):547-560.
[8]吳华瑞. 基于深度残差网络的番茄叶片病害识别方法[J]. 智慧农业,2019,1(4):42-49.
[9]樊湘鹏,许 燕,周建平,等. 基于迁移学习和改进CNN的葡萄叶部病害检测系统[J]. 农业工程学报,2021,37(6):151-159.
[10]孟 亮,郭小燕,杜佳举,等. 一种轻量级CNN农作物病害图像识别模型[J]. 江苏农业学报,2021,37(5):1143-1150.
[11]Zhang P,Yang L,Li D L. EfficientNet-B4-Ranger:a novel method for greenhouse cucumber disease recognition under natural complex environment[J]. Computers and Electronics in Agriculture,2020,176:105652.
[12]Zhao Y,Sun C D,Xu X,et al. RIC-Net:a plant disease classification model based on the fusion of Inception and residual structure and embedded attention mechanism[J]. Computers and Electronics in Agriculture,2022,193:106644.
[13]杜忠康,房 胜,李 哲,等. 基于卷积神经网络深度特征融合的番茄叶片病害检测[J]. 中国科技论文,2021,16(7):701-707.
[14]刘亮希,李 金,任 丽,等. 早熟牛心甘蓝新品种瑞光春雷[J]. 长江蔬菜,2022(11):16-17.
[15]Redmon J,Divvala S,Girshick R,et al. You only look once:unified,real-time object detection[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas,NV,USA:IEEE,2016:779-788.
[16]Ge Z,Liu S T,Wang F,et al. YOLOX:exceeding YOLO series in 2021[EB/OL]. (2021-08-06)[2022-10-01]. https://arxiv.org/abs/2107.08430.
[17]Tan M X,Le Q V. EfficientNet:rethinking model scaling for convolutional neural networks[EB/OL]. (2020-09-11)[2022-10-01]. https://arxiv.org/abs/1905.11946.
[18]Agarwal M,Gupta S K,Biswas K K. Development of efficient CNN model for tomato crop disease identification[J]. Sustainable Computing:Informatics and Systems,2020,28:100407.
[19]Woo S,Park J,Lee J Y,et al. CBAM:convolutional block attention module[M]//Computer Vision-ECCV 2018.Cham:Springer International Publishing,2018:3-19.
[20]Liu S T,Huang D,Wang Y H. Learning spatial fusion for single-shot object detection[EB/OL]. (2019-11-25)[2022-10-01]. https://arxiv.org/abs/1911.09516.
[21]Li C,Cao Y N,Peng Y K. Research on automatic driving target detection based on YOLOv5s[J]. Journal of Physics:Conference Series,2022,2171(1):012047.
[22]Zheng Z H,Wang P,Liu W,et al. Distance-IoU loss:faster and better learning for bounding box regression[J]. Proceedings of the AAAI Conference on Artificial Intelligence,2020,34(7):12993-13000.
[23]Yang Z M,Wang X L,Li J G. EIoU:an improved vehicle detection algorithm based on VehicleNet neural network[J]. Journal of Physics:Conference Series,2021,1924(1):012001.
