运载火箭整流罩内主动降噪控制技术
2023-05-12吴家琦吴松王文哲唐国安
吴家琦,吴松,2,王文哲,唐国安
(1.复旦大学 航空航天系,上海 200433;2.上海宇航系统工程研究所/上海市空间结构机构重点实验室,上海 201109)
0 引言
在运载火箭升空的主动段,整流罩内声振环境极其恶劣,主要源于以下2 个方面:①起飞段发动机造成的强烈喷流噪声;② 火箭飞行时激波等气动噪声[1]。这些噪声具有声级高、频带宽的特点,且具有不稳定性和随机性[2-4]。整流罩声振环境传递到卫星,并逐级作用于各个次级系统和组件,易导致卫星的有效载荷、设备结构被破坏,甚至直接影响卫星的性能和任务成败。美国国家航天航空局(NASA)的一项调查研究表明,发射后短期内出现航天器故障的情况,近50%是由发射阶段的声振环境引起的[5]。
声学降噪方法主要有被动噪声控制和主动噪声控制2 种。被动噪声控制被应用于运载火箭整流罩,在整流罩内壁敷设声学覆盖层(如玻璃纤维、毛毡等),利用材料的隔声和吸声性能减少声压传递和反射,相关研究有声学覆盖层的改进设计、亥姆霍兹共鸣器、分布式吸振器、被动声振衰减装置等[6-9]。这类降噪方法已在Delta Ⅳ等运载火箭上得到实际应用[10],国内学者和工程师也在持续积极地探索和实践[11-14]。被动降噪方法对抑制中高频段的噪声有显著效果,但由于受重量和体积的约束,对抑制低频段的噪声效果不佳。
主动噪声(Active Noise Cancellation,ANC)控制的基本原理是对原噪声叠加“反噪声”,从而抵消原噪声。反噪声的声压幅值与原噪声相同,但相位相反。反噪声由数字信号控制器(Digital Signal Processing,DSP)、数据采集和信号发生器(AD/DA)、功率放大器、相关算法等软硬件系统组成。实时估计噪声信号的幅值和相位是实现ANC 的关键,基于最小误差均方值(Least Mean Square,LMS)算法的自适应滤波器是这一方面应用的主流方法[15]。LMS 自适应滤波器也被用于辨识次级通道(从发出的反噪声信号到降噪区域)的声学传递特性。
ANC 技术已在头戴式耳机等商业领域得到成功应用[16-17]。但该方法暂无法被推广应用于运载火箭整流罩内具有宽频带、随机特性的声振环境降噪,因为整流罩内噪声信号来源复杂,噪声声压测点位置受限等。为此,本文就相关问题展开研究,用线性代数方法诠释了滤波最小均方值(Filtered-x Least Mean Square,FxLMS)算法的数学原理,探究ANC 用于运载火箭整流罩内降噪的实施途径、次级通道特征辨识方法、自适应滤波器参数选优策略,以及实验室条件下主动降噪的原理性验证。
1 自适应滤波的原理和应用
1.1 自适应滤波器
ANC 方法对噪声信号的估计是数字滤波过程,经典的数字滤波器有有限冲激响应(Finite Impulse Response,FIR)和无限冲激响应(Infinite Impulse Response,IIR)2 种。通常情况下,ANC 系统对实时性要求较高,FIR 滤波器具有线性相位响应和稳定性好的特点,因此本文讨论的滤波器均为FIR 滤波器。
滤波器输入信号x的时间序列表示为Xn={xn,xn-1,…},滤波器权系数用长度为L的向量表示w=[w0,w1,…,wL-1]T,滤波后信号y的时间序列序列 表示为Yn={yn,yn-1,…},其中n是当前时刻的时间序号,xn是n时刻采样 值,xn-1是n-1 时刻的采样值,以此类推。输入输出关系表示为
将序列Xn中最新的L个信号组成的向量记为xn=[xn,xn-1,…,xn-L+1]T。在式(1)中,令j=0,n时刻的输出信号yn可表示为滤波器权系数w与向量xn的点积,其方程式为
将Yn最新的L个信号组成的向量记为yn=[yn,yn-1,…,yn-L+1]T,也可根据式(1),将向量yn与序列Xn的关系用权系数w表示为
自适应滤波器的权系数w可以调控信号,使得滤波后的信号yn接近期望信号dn。如信号偏差en=dn-yn未达到最小值,表示滤波器权系数w准确度不够。LMS 算法是根据误差值en,动态地修正滤波器权系数w=[w0,w1,…,wL-1]T,将第n时刻权系数w(n)迭代更新,得到新的n+1 时刻的权系数w(n+1)。
在信号处理过程中不断调整权系数,使得误差en逐渐减少,这种滤波器被称为自适应滤波器,如图1 所示。图中,自适应滤波器有滤波部分和自适应算法2 个部分。斜箭头表示滤波器根据LMS 自适应算法不断更新调整权系数,达到自适应滤波的效果。
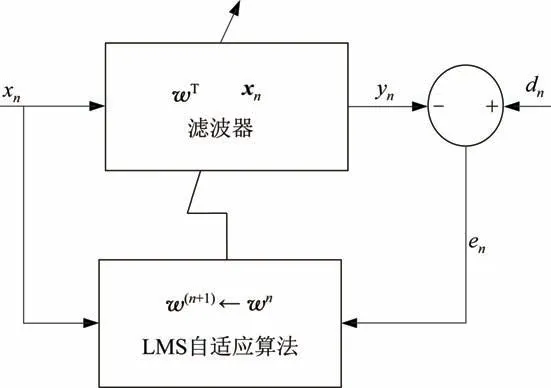
图1 自适应滤波器Fig.1 Block diagram of the adaptive filter system
LMS 算法将更新后的滤波器权系数方程式为
式中:Δw(n)为权系数增量。
更新后,滤波器权系数计算得到的误差信号平方尽可能小,即
式中:函数φ(Δw(n))为关于Δw(n)的二次型。
用单步的最速下降法沿梯度∇φ(0)反方向,使得φ(Δw(n))达到极小的增量为
得到自适应滤波器权系数的更新公式为
1.2 基于自适应滤波的次级通道辨识
ANC 系统算法设计需明确从控制器生成的信号到拾音器采集的信号之间的传递关系s。2 个信号之间的通道有扬声器输出反噪声所经过的数模(D/A)转换器、功率放大器等电子电路、扬声器至拾音器之间的声场、拾音器测量到信号所经过的放大器、模数(A/D)转换器等电子电路[18]。在主动降噪技术中,该通道也被称为次级通道,其传递关系可用长度为L的滤波器权系数为
利用自适应滤波器可辨别次级通道传递关系s,如图2 所示。辨识所得次级通道估计滤波器权系数记为
由图2 可知,输入信号xn被分岔为两路:一路经实际物理次级通道s传递,被拾音器采样,作为期望信号dn;另一路经自适应滤波器滤波,得到输出信号yn。
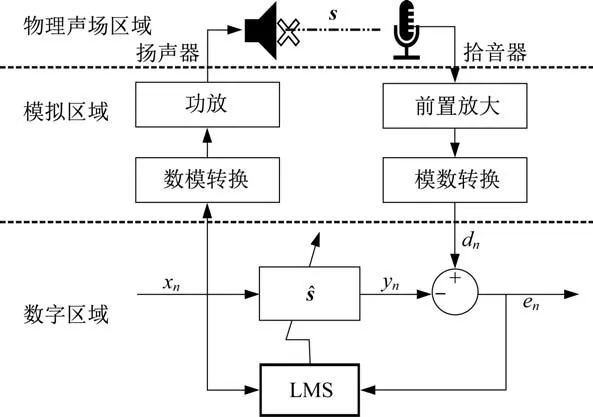
图2 基于自适应滤波的通道辨识Fig.2 Path identification based on adaptive filtering
2 个信号的误差为
更新得到第n+1 时刻滤波器权系数为
极小化问题式(9)与式(12)在数学形式上完全一致,用于更新图1 中滤波器权系数的LMS 自适应算法,可辨识图2 中的声学通道传递特性。
如果输入信号xn为白噪声,即通过注入白噪声的方法辨识通道离线,可在通道辨识的频带范围、自适应滤波器的收敛速度、计算复杂度等方面取得较好的效果[19-20]。同时,离线辨识可脱离ANC 系统独立运行,不增加降噪实时控制时系统的计算负担,只需将更新收敛后的权系数用于后续的ANC 系统设计。
1.3 基于自适应滤波的主动降噪控制
利用自适应滤波器的原理可搭建ANC 系统的基本框架,如图3 所示,用于消除一维管道中的噪声。系统中,除噪声源和产生反噪声的扬声器外,还有2 个测量拾音器:靠近噪声源的参考拾音器和位于扬声器下游的误差拾音器。图3 中的初级通道和次级通道分别指参考拾音器和扬声器到误差拾音器的声信号传递通道。

图3 基于FxLMS 算法的一维管道中的噪声消除Fig.3 Noise cancellation in one-dimensional pipeline based on the FxLMS algorithm
在这种消声系统中,自适应滤波器对参考拾音器信号滤波后再取反,生成反噪声信号输出到扬声器。误差拾音器在时刻n采集到的信号,是噪声传递至误差拾音器处的信号与经次级通道传播的反噪声叠加后的结果,即
LMS 算法更新滤波器系数w(n+1)=w(n)+Δw(n),使得更新后的误差信号平方尽可能小,即
根据点积和线性卷积的定义式(1)和式(3)可知
因此极小化问题式(14)等价于
对比式(4)与式(16)可知,极小化问题式(16)对应以s*Xn为输入信号、en为误差信号的自适应滤波器。因此,在ANC 设计时,应在参考拾音器输入信号xn后,连接一个次级通道估计滤波器(如图3的左下角),将信号转化为*Xn,再输入LMS 算法模块。这种对噪声信号经次级通道滤波处理的方法,被称为FxLMS(Filtered-x LMS)算法[21]。
2 运载整流罩内主动降噪系统设计与验证
2.1 反馈式FxLMS 算法主动降噪控制模型
运载整流罩内部封闭和噪声初级通道相对复杂,测量噪声源的参考拾音器测点位置受限,如1.3节所述,一般的双麦克风ANC 系统不能简单推广应用于运载火箭整流罩内。因此本文采用只布置一个误差拾音器的ANC 系统,如图4 所示,去除了参考拾音器。
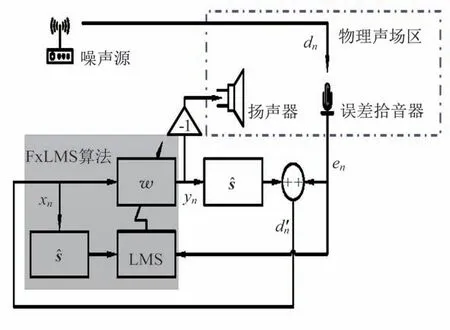
图4 反馈式FxLMS 算法主动降噪系统Fig.4 Block diagram of the feedback ANC system by the FxLMS algorithm
为了给FxLMS 算法提供所需参考信号,可将经次级通道估计滤波器滤波后的反噪声信号与误差拾音器测到的误差信号求和,估计拾音器所处位置的噪声信号dn,记为,并用其代替参考拾音器,作为自适应算法模块的输入信号xn,即
2.2 运载整流罩内主动降噪实验系统设计
将反馈式FxLMS 算法应用于运载整流罩内,控制主动噪声,所搭建的实验系统如图5 所示,其由激振器、激振杆、整流罩实验模拟件、拾音器、扬声器、工控机、信号放大器、功率放大器、PC 机等组成。激振杆长度200 mm、直径5 mm,装配在激振器上并与整流罩壁固定连接,用于保证激振器单一方向施加激振力,模拟气动对罩壁激励、制造噪声;整流罩实验模拟容器是直径400 mm、高500 mm 的304 不锈钢薄壁容器,容积约为63 L。工控机采用Intel 四核CPU 并搭载FPGA 实时模块。拾音器悬在容器内部上方,测量噪声信号,其型号为GRAS-40PP。扬声器放置在容器内部下方发出反噪声,其型号为SEAS-H1217。

图5 主动降噪实验装置Fig.5 Schematic diagram of the setup of ANC experiments
主动降噪的程序用Matlab/Simulink 编制后烧录到工控机实时运行。实验过程的噪声信号由PC机生成,通过激振器功放驱动激振杆,激励容器外侧壁面,在内部产生噪声。噪声信号的生成参考运载火箭发射起飞阶段的遥测数据,将遥测噪声时域数据等比缩小后发送至激振器功放。为验证实验所营造出的噪声环境的有效性,将其与遥测噪声功率谱对比,如图6 所示。图中,蓝色实线是遥测噪声功率谱信号,红色虚线是预实验时测得的容器内噪声功率谱信号。由图6 可知,运载整流罩内噪声具有宽频特征。对比2 个信号发现,两者除了在功率幅值上有一定差异外,整体的频域特性在30~500 Hz 频段内较为相似,且2 个信号功率谱较为集中的频点均为63.8 Hz。
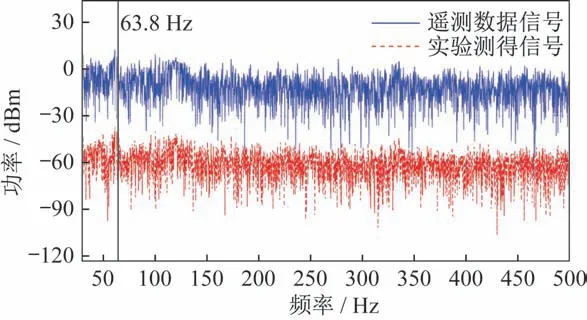
图6 噪声源功率谱对比Fig.6 Spectrogram of the noise source power
实验采用1.2 节中注入白噪声方法,对次级通道进行离线辨识。PC 机生成白噪声,并通过扬声器发出,用拾音器测量声压信号,再将其反馈给工控机处理,辨识出次级通道的传递特性。辨识所用的Simulink 10.1 程序如图7 所示。白噪声源输出范围为±1,自适应滤波器采用Matlab/DSP 工具箱的LMS filter 模块。辨识得到的次级通道滤波器权系数如图8 所示。为验证辨识结果准确性,将截取的一段白噪声样本作为输入信号xn,分别将经真实次级通道s后的信号与经实验辨识出的次级通道估计滤波器后的信号,在时域中对比,如图9 所示。红色虚线为拾音器测得白噪声通过s后的电压信号,黑色实线为拾音器测得白噪声通过后的电压信号。由图9 可知,2 个信号基本重合,说明次级通道辨识结果较为准确。
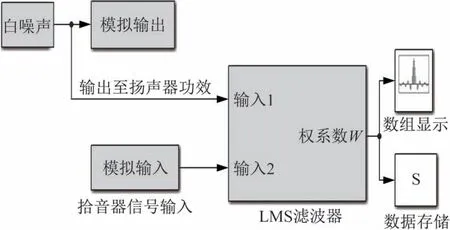
图7 次级通道辨识程序Fig.7 Secondary path identification program

图8 次级通道辨识系数Fig.8 Identification coefficients of the secondary path
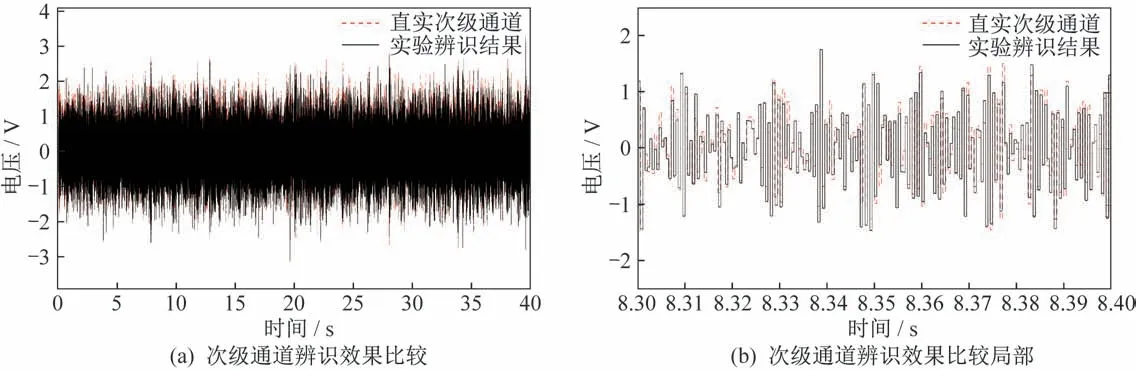
图9 时域中次级通道辨识效果Fig.9 Secondary channel identification results in the time domain
原则上,通道辨识时,滤波器参数的选取需满足采样频率fs至少大于分析频段上限的2 倍,但同时采样点数应覆盖分析频段下限尽可能多的周期。本文分析频率为30~500 Hz,因此,采样频率fs取分析频带上限的4 倍,即fs=2 000 Hz;滤波器长度N取覆盖分析频带下限的3 个周期,即N=200;自适应滤波器收敛系数μ通过预试验调试,选取μ=0.01 能够保证系统的稳定性与精度。
2.3 运载整流罩主动降噪实验与结果分析
验证整流罩模拟试验件的ANC 降噪效果共进行以下3 组实验。
1)针对遥测噪声功率谱频率分布范围广的特点,开展了30~500 Hz 中低频段的ANC 实验。依据2.1 节所述的原理与系统模型,用Simulink 实现的控制程序如图10 所示。次级通道估计滤波器中的权系数就是2.2 节中的辨识结果,降噪实验的采样频率和滤波器长度等参数与次级通道辨识时相同。
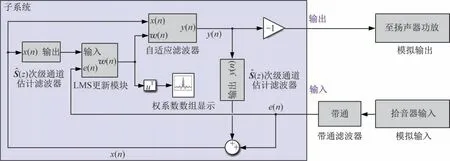
图10 宽带主动降噪实验控制程序Fig.10 Control program for the broadband ANC experiment
2)针对遥测噪声信号在63.8 Hz 附近频谱响应较为集中的特点,开展了(63.8±0.5)Hz 的窄带ANC 实验。Simulink 实现的程序与图10 基本一致,仅将右下角滤波器的带通范围改为(63.8±0.5)Hz。
3)对30~500 Hz 噪声分布较宽的宽带频段和(63.8±0.5)Hz 分布密集的窄带频段开展了组合式ANC 降噪实验。Simulink 实现的控制流程如图11所示,图中子系统是图10 中浅色方框的封装,误差拾音器采集的信号经不同滤波器后,分别用2 个独立自适应滤波器计算反噪声信号,叠加后再输出给扬声器功放。
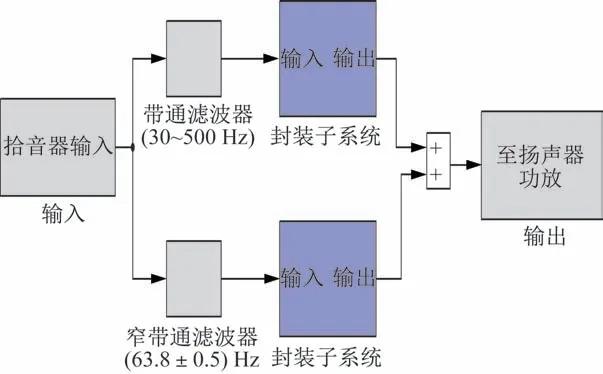
图11 宽带和窄带同时主动降噪控制程序Fig.11 Control program for the combined broadband and narrowband ANC experiment
将上述的3 组ANC 实验及未作降噪处理时拾音器测得的信号记录在图12 中。由图12 可知,红色曲线代表的未作降噪处理时的噪声幅值显著高于其他3 组ANC 实验的幅值,表明实验所采用反馈式ANC 控制模型的降噪效果明显。为探究宽带、窄带和组合式ANC 的效果,进一步分析还需在频域开展。
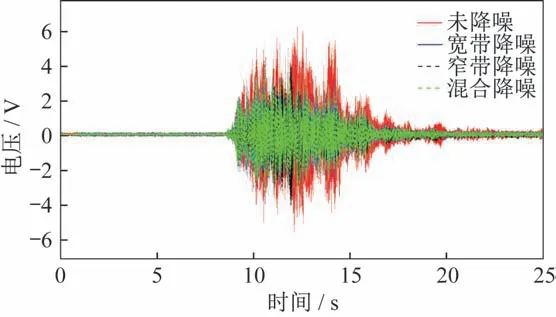
图12 时域中主动降噪实验结果Fig.12 Results of the ANC experiments in the time domain
将图12 中4 组时域信号进行快速傅里叶变换(Fast Fourier Transform,FFT)后再计算其均方值(Root Mean Square,RMS),得到相应的RMS 谱如图13 所示。图中:红色粗实线表示无控制时的噪声信号;蓝色细实线表示对(30~500)Hz宽带降噪后的信号;黑色虚线表示对(63.8±0.5)Hz窄带降噪后的信号;绿色虚线表示同时对30~500 Hz 宽带和(63.8±0.5)Hz窄带降噪后的信号。

图13 频域中主动降噪实验结果Fig.13 Results of the ANC experiments in the frequency domain
响应峰均有较明显的降噪效果,但对300 Hz 以上的频段降噪效果不明显。在噪声峰值63.8 Hz 附近,与未降噪信号相比,3 组ANC 实验幅值有极大衰减,其中仅使用窄带降噪的在(63.8±0.5)Hz 范围内效果最佳。在窄带降噪控制频段之外出现新的低幅度响应峰,这是因为ANC 系统发出的反噪声幅值超过了未作降噪处理时的噪声信号。
将图13 中的3 组ANC 实验相对于未降噪信号的变化量记录见表1。结果表明,组合式ANC 在30~500 Hz 频段降噪效果仅比进行宽带降噪的情况低0.6 dB,但在(63.8±0.5)Hz 窄带频段声功率还可再降低2.5 dB,兼顾了宽带降噪和窄带降噪的效果,综合性能最好。在噪声幅值最大的10~15 s 时间段,3 种方案的降噪效果与全时间段相比,均有小幅提升,此时仅进行宽带降噪在整个频段内的降噪效果最佳。主动降噪控制的频段范围较窄时,其降噪效果明显更优,窄带降噪更适合于噪声频谱有明确峰值的情况。

表1 主动噪声控制实验降噪结果Tab.1 Results of the ANC control experiments
3 结束语
本文采用FxLMS-ANC 的主动降噪方法,对由激振器激励薄壁容器产生的封闭空间内噪声环境进行噪声抑制。这种实验方法,在一定程度上模拟了运载火箭整流罩内的声振环境,营造的噪声与遥测信号的功率谱具有相似特性。实验结果表明,对封闭空间内中低频段的噪声,在声压不固定的起飞阶段,FxLMS-ANC 方法也能表现出较好的降噪效果,特别是针对功率谱峰值所在的频点实施窄带降噪,其降噪效果更为显著。上述基于实验室环境得出的实验结论初步,验证了在运载火箭整流罩内进行主动降噪的有效性。
此外,本文在实验室环境下,由激振器激励模拟出气动噪声,未来可在混响室中营造出与遥测噪声更加相似的环境,并进行主动降噪验证,实验结果会更具参考性。同时,本文仅采用单通道的ANC系统,对大型整流罩等实际工程中的主动降噪应用,未来将拓展至多通道ANC 控制系统,研究多通道主动降噪系统中次级声源的数量、位置、阵列形状等对主动降噪效果的影响,进一步提升降噪效果。