一种基于联邦滤波的SINS/GNSS/RA 弹载多源组合导航算法
2023-05-12李杰梁玉琴李昃雯程遵堃
李杰,梁玉琴,李昃雯,秦 硕,程遵堃
(上海航天控制技术研究所,上海 201109)
0 引言
弹载导航系统提供的位置、速度和姿态信息,能够指引导弹按照既定的弹道飞行,从而对目标实现精确打击。弹载导航系统需要工作在全天候、高动态环境中,目前多采用惯性/卫星(Ship’s Inertial Navigation System/Global Navigation Satellite System,SINS/GNSS)组合导航的方式[1]。SINS 不需要接收外部信息,是一种完全的自主式导航系统,但由于其工作原理的特殊性,长时间单独运行导航信息会逐渐发散[2],因此需要以其他导航信息,如GNSS 提供的位置和速度等进行修正。然而GNSS接收机易受干扰,常常因为接收不到卫星信号而导致丢星,无法提供组合导航融合信息,使得导弹的打击精度受到影响。
单一的SINS/GNSS 组合导航系统难以满足导弹精确打击的需求,因此辅助传感器的研发和选用极为迫切。在众多高程测量传感器中,雷达高度表(Radar Altimeter,RA)具有体积小、功耗低、精度高且测高范围大等特点[3],常用于航空航天设备中。因此选取雷达高度表为弹载导航提供信息源参与SINS/GNSS 信息融合,能够极大地提升弹载导航系统的鲁棒性和可靠性。
本文基于发射惯性系,构建了SINS/GNSS/RA弹载多源组合导航系统联邦滤波融合框架,并推导了数学模型,通过弹道仿真试验验证了该算法的正确性,为弹载多源组合导航系统的研究提供了思路。
1 联邦卡尔曼滤波融合框架
SINS/GNSS/RA 弹载多源组合导航系统选取SINS 作为公共参考系统,构建SINS/GNSS 和SINS/RA 两个子滤波器,联邦滤波算法结构如图1所示。
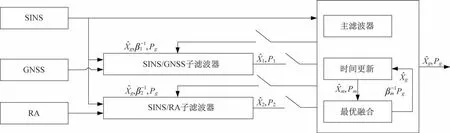
图1 联邦滤波算法结构Fig.1 Structure diagram of the federated filter algorithm
联邦滤波的状态方程和量测方程为[4]
式中:F(k)、G(k)、X(k)、w(k)分别为k时刻状态转移矩阵、系统噪声驱动矩阵、状态矢量和系统状态噪声矢量;X(k+1)为系统k时刻到k+1 时刻状态估计值;Zi(k)、Hi(k)和vi(k)为系统k时刻子滤波器i的量测矢量、量测矩阵和量测噪声矩阵。
联邦滤波信息融合方法主要包含4 个环节[5-6]:
1)子滤波器信息的时间更新
式中:Pi(k+1|k)、Qi(k+1|k)分别为子滤波器i状态一步预测误差估计协方差矩阵和一步预测系统噪声方差矩阵。
2)子滤波器信息的量测更新
式中:Ki(k)、Ri(k)分别为子滤波器i增益矩阵和量测噪声方差矩阵。
3)主滤波器信息融合,假设子滤波器的数量用N表示,则信息融合得到状态量全局最优估计和全局最优估计协方差阵:
4)子滤波器信息分配,子滤波器信息Pi(k)、的分配按照如下原则进行:
式(5)中,信息分配系数βi(βi>0)满足信息守恒原理:
通过以上4 个环节,可以实现多个导航信息源测量值对状态的最优估计,从而得到最优融合后的导航输出信息。
2 发射惯性系下SINS/GNSS/RA 组合导航系统数学模型
由于联邦滤波将SINS 作为公共参考系统,因此选取发射惯性系下SINS 的基本导航参数误差和惯性仪器参数误差共15 维误差信息作为状态变量[7],用X(k)表示为
式中:φx、φy、φz为发射惯性系下姿态失准角;δVx、δVy、δVz和δx、δy、δz分别为发射惯性系下x、y、z3个轴向速度和位置误差;εx、εy、εz和∇x、∇y、∇z分别为弹体坐标系下陀螺仪常值漂移和加速度计常值偏置。
通过姿态失准角、速度、位置和惯性器件误差传播方程构建式(1)中的状态方程,F(k)、G(k)和w(k)的具体参数见文献[7],此处不再赘述。
2.1 SINS/GNSS 子滤波器
SINS/GNSS 子滤波器量测方程由3个轴向速度和3个轴向位置2部分量测方程构成[8-12],具体如下:
1)速度量测方程:
式中:Vsx、Vsy、Vsz为由SINS 解算的发射惯性 系下x、y、z3 个轴向速度值;Vgx、Vgy、Vgz为由GNSS 输出的速度转换到发射惯性系下投影在x、y、z3 个轴向上的分量;vv为GNSS 接收机速度测量误差矢量;Hv为速度量测矩阵。
2)位置量测方程:
式中:Xs、Ys、Zs为由SINS解算的发射惯性系下x、y、z3 个轴向位置值;Xg、Yg、Zg为由GNSS 输出的位置转换到发射惯性系下投影在x、y、z3 个轴向上的分量;vp为GNSS 接收机位置测量误差矢量;Hp为位置量测矩阵,
由式(8)和式(10),可得到SINS/GNSS 子滤波器的量测方程:
式中:ZGNSS、HGNSS和vGNSS分别为SINS/GNSS 子滤波器系统的量测矢量、量测矩阵和量测误差矩阵。
2.2 SINS/RA 子滤波器
装载有RA 的导弹在飞行过程中,以一定的频率向地球表面发射雷达脉冲[13-25],导弹上的雷达信号接收装置接收到回波后,通过时间间隔Δt可以得到RA 的测量值H′[2],具 体为
式中:c为电磁波传递速度。
为了获得导弹实际所在位置的海拔高度,需要对测量值H′进行补偿,具体如下:
式中:Δh为补偿值,由当地海拔等因素确定。
发射惯性系下导弹位置如图2 所示。图2 中,Re0、Re分别为发射点和当前导弹所在位置的地球半径。

图2 发射惯性系下导弹位置Fig.2 Schematic diagram of the missile position under the launch inertial system
在发射惯性系即Ol-XlYlZl系下,位置矢量OlP与发射点水平面夹角用θo表示,满足式(15):
式中:x、y、z为导弹所处位置在发射惯性系下的坐标。
将坐标转换为海拔高度值为
Hs与Hr作差,可得
式中:vh为误差项,受导航误差和RA 测量精度影响。其中,
综上,构建SINS/RA 子滤波器的量测方程为
其中,量测矩阵HRA为
3 仿真校验
3.1 仿真条件
1)设计导弹为垂直发射,发射点初始位置:纬度32.0°,经度118.0°,高度0 m;发射方位角为90°;主动段为70 s,全程飞行时间为357 s。
2)GNSS 采样频率为1 Hz,RA 的采样频率为10 Hz,SINS 采样频率为200 Hz;联邦滤波融合周期为1 s。
3)陀螺仪常值漂移为0.5(°)/h,白噪声为0.1(°)/h;加速度计常值偏置为1 mg,白噪声为0.5 mg。GNSS 位置误差为10 m,速度误差为0.1 m/s。RA的测量误差为30 m。
3.2 仿真结果及分析
通过上述条件生成弹道轨迹,如图3 所示。
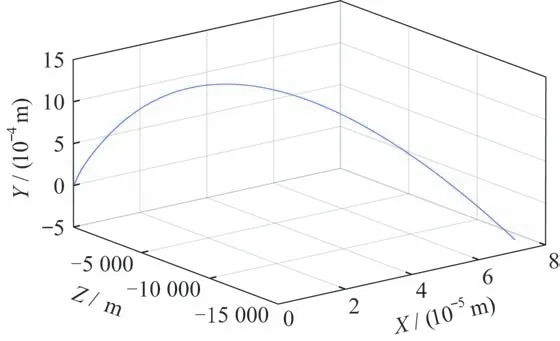
图3 发射惯性系下弹道轨迹Fig.3 Ballistic trajectory in the launch inertial coordinate system
生成发射惯性系下SINS、GNSS 和RA 仿真数据后,利用联邦滤波算法进行信息融合,得到发射惯性系下的位置误差曲线,如图4 所示。
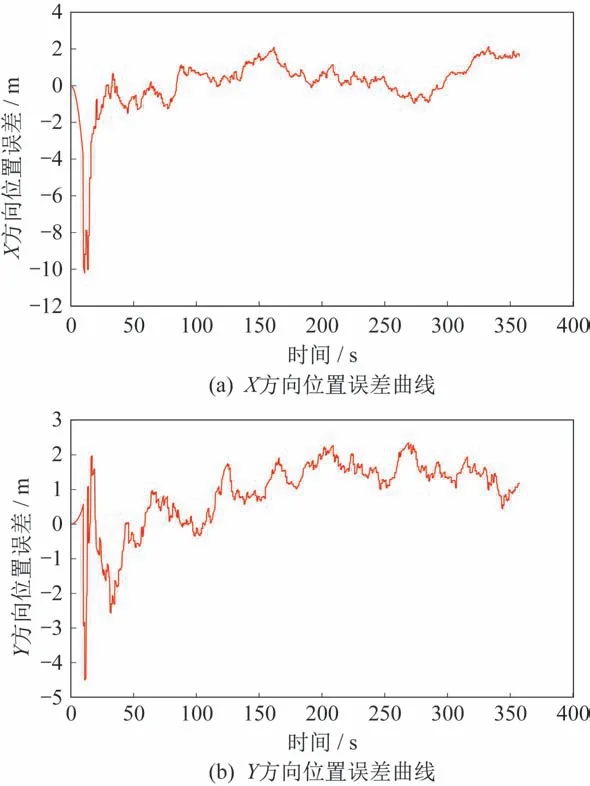
图4 发射惯性系下X、Y和Z 3 个方向位置误差曲线Fig.4 Position error curves of the X-,Y-,and Zdirections in the launch inertial coordinate system
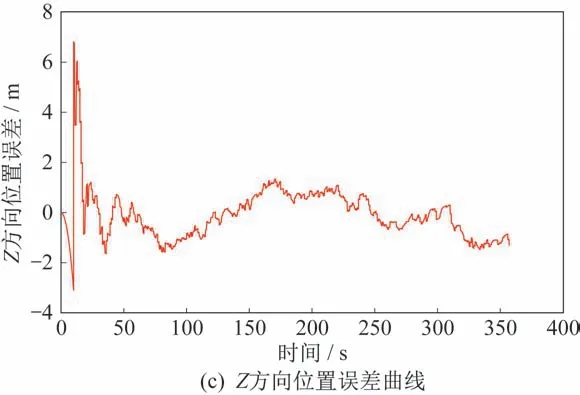
续图4 发射惯性系下X、Y和Z 3 个方向位置误差曲线Continue Fig.4 Position error curves of the X-,Y-,and Zdirections in the launch inertial coordinate system
由图4 可知,本文所设计的SINS/GNSS/RA 多源组合导航系统使用联邦滤波进行信息融合后,位置误差能够在短时间收敛,且波动幅度较小,能够得到稳定的导航位置信息。计算x、y、z3 个方向位置的均方根误差分别为1.48、1.34 和1.03 m,由此可知,导航系统输出的导航定位结果具有较高的精度。
本文基于联邦滤波的弹载多源组合导航算法,旨在提高弹载导航系统的稳定性和可靠性,在GNSS 失效的情况下,依然可以为导弹提供较为准确的导航定位信息。因此,设计仿真试验,生成一组仿真数据,在导弹飞行250 s 时,对GNSS 施加干扰,使其处于丢星状态,分别使用本文设计的SINS/GNSS/RA 多源组合导航系统与传统的SINS/GNSS 组合导航系统进行信息融合,得到位置误差对比曲线如图5 所示。
由图5 可知,在导弹飞行250 s 即GNSS 未受干扰之前,SINS/GNSS/RA 多源组合导航系统和SINS/GNSS 组合导航系统两者误差相近,都有较高导航定位精度;在导弹飞行250 s 之后,SINS/GNSS 组合导航系统x、y、z3 个方向位置误差均快速发散,而SINS/GNSS/RA 多源组合导航系统误差虽然也缓慢发散,但在短时间内,依然可以为导弹提供较可靠的导航定位信息。
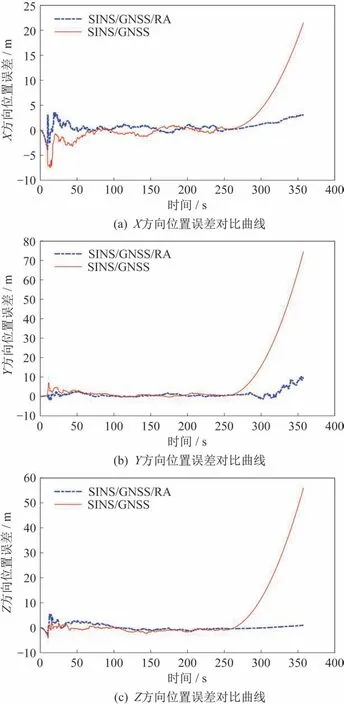
图5 发射惯性系下位置误差对比曲线Fig.5 Comparative position error curves in the launch inertial coordinate system
在GNSS 受到干扰后,SINS/GNSS 子滤波器失效,联邦滤波主滤波器只融合了SINS/RA 的处理结果。分析SINS/RA 子滤波器的量测方程可知,SINS/RA 子滤波器能够对位置误差进行估计,使得联邦滤波信息融合后可以在一定程度上对导弹的位置进行修正,从而保证了导弹的打击精度。
4 结束语
本文分析了导弹传统SINS/GNSS 组合导航系统的缺陷,提出了基于联邦滤波的SINS/GNSS/RA 多源组合导航算法。通过弹道仿真试验,验证了导航算法的正确性。在GNSS 受干扰的情况下,将本文设计的弹载SINS/GNSS/RA 多源组合导航系统与传统SINS/GNSS 组合导航系统作对比,结果表明,本文设计的导航系统具有更高的鲁棒性和可靠性,并依然能够在一定时间范围内保证导弹的打击精度。