爬壁机器人全遍历路径规划方法
2023-05-11杨建邦李梦阳毛方海
杨建邦 李梦阳 毛方海
(1.山西大唐国际神头发电有限责任公司,山西 朔州 036000;2.中国大唐集团科学技术研究总院有限公司西北电力试验研究院,陕西 西安 710000;3.合肥哈工特安智能科技有限公司,安徽 合肥 230000)
随着机光电算控及其融合技术的日益成熟,机器人技术也快速发展,在危险救援、灾害搜救以及无人巡检等领域获得了广泛应用。在各种类型的机器人中,爬壁机器人具有吸附稳定、自主控制以及自动化作业等优点,为解决很多实际问题提供了理想的方案[1]。火电厂的水冷壁需要进行定期检查和清扫。长期以来,这项工作都通过人工的方式完成,主要手段是目测、望远镜观测,对位置较高或难以自然观察的位置来说,还需要搭建脚手架。通过人工完成火电厂水冷壁检查的方式不仅检测精度、检测效率低,而且还存在严重的安全隐患,爬壁机器人给火电厂水冷壁的自动化巡检和清扫提出了完美的解决方案。针对水冷壁的爬壁机器人设计包括机器人本体设计、D-H 建模、运动学分析、动力学分析以及路径规划等关键内容[2]。其中,路径规划方法的合理性直接决定了爬壁机器人巡检和清扫的工作效率[3]。该文以火电厂水冷壁巡检和清扫为研究背景,在对爬壁机器人进行运动学分析的基础上,提出一种全遍历的路径规划方法,并通过仿真试验进行验证,以期为火电厂水冷壁自动化巡检和清扫提供解决方案。
1 火电厂水冷壁爬壁机器人运动学分析
为了提高火电厂水冷壁巡检和清扫效果,在进行爬壁机器人路径规划前,应充分了解其运动状态,使其能够准确地按照规划的路径运动。因此,在路径规划前要先对爬壁机器人进行运动学分析。
在对爬壁机器人进行运动学分析的过程中,须设定3个假设条件:1) 将爬壁机器人整体看作一个刚体,即运动过程中因受力、接触以及碰撞等造成的变形忽略不计。2)爬壁机器人底部为履带结构,忽略履带在运动过程中可能存在的微小横向位移。3) 假设爬壁机器人运动的水冷壁壁面为平面并且各处提供给机器人的摩擦力是一样的。
在爬壁机器人运动的过程中,其机器人本体可以在二维地图平面上按照任意路径行进,其前提是运动路径上没有遮挡或障碍。不论何种复杂形式的行进或运动,其实质就是连续的平移运动和旋转运动的组合。与平移运动相比,从数学意义上描述爬壁机器人做旋转运动的过程更复杂。
以图1 为例,分析爬壁机器人从水冷壁A点移动到B点的运动过程。
如图1 所示,在爬壁机器人的运动过程中,其车体自身配置一个坐标系,从而便于表示与地图固定坐标系间的关系。在A点,爬壁机器人的位姿如公式(1)所示。
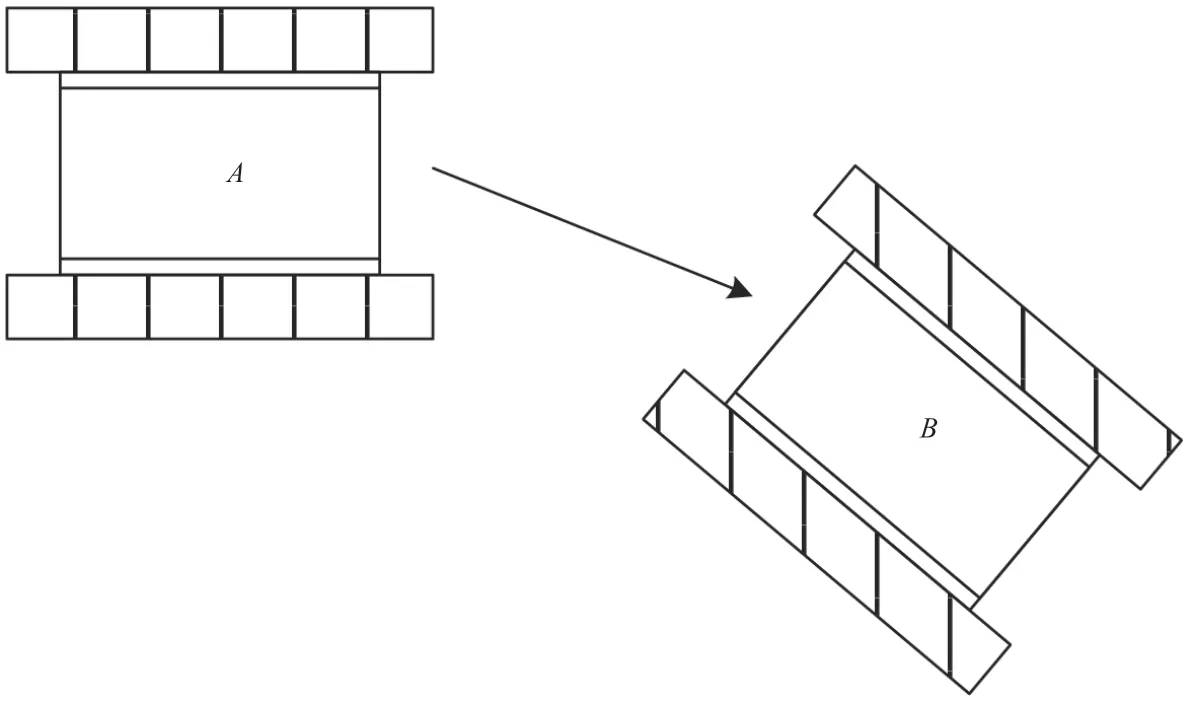
图1 爬壁机器人从A 点移动到B 点的示意情况
式中:XA为爬壁机器人在A点的横坐标;YA为爬壁机器人在A点的纵坐标;θA为爬壁机器人A点的角度坐标;XA为爬壁机器人在A点速度向量的水平分量;YA为爬壁机器人在A点速度向量的垂直分量;θA为爬壁机器人在A点的角速度;v为爬壁机器人的移动速度;ω为爬壁机器人的转动角速度。
2 爬壁机器人的全遍历路径规划方法
在明确爬壁机器人的运动原理后,进一步构建路径规划方法,以实现机器人的自动化巡检和清扫作业。为了达到最高的巡检和清扫效率,需要对水冷壁的每个局部进行处理。
因此,该文构建一种全遍历的路径规划方法。首先,对爬壁机器人的工作区域进行栅格化处理,将全部工作区地图划分为栅格,这些栅格的信息是已知的先验信息。其次,该方法充分考虑水冷壁的非理想情况,即水冷壁各个区域并不都是完全光滑和可执行作业的,这些区域称为障碍区域。障碍区域的形状和大小可能相同,也可能存在差异。从大小来看,有的障碍只占据1 个栅格,有的则占据多个栅格。这些障碍所在的区域是路径规划中机器人禁止通行的区域,爬壁机器人只能在没有障碍的栅格区域进行移动和作业。该文提出的全遍历路径规划方法示意如图2所示。
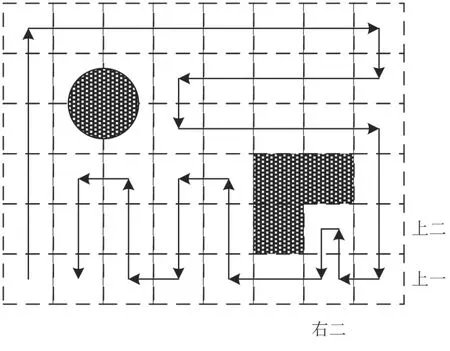
图2 该文提出的全遍历路径规划方法示意情况
在图2 中,假设爬壁机器人的巡检和清扫区域是1 个48 栅格区域。其中,这个区域的横向宽度为8 个栅格,纵向高度为6 个栅格。爬壁机器人从(左一,上一)的位置开始进入这一区域,按照全局遍历的原则执行路径规划。在该区域中,包括2 个障碍区域,一个是圆形障碍区域,占据4 个栅格;另一个是角形障碍区域,占据3 个栅格。爬壁机器人从起始位置开始,在尽可能遍历每个栅格的同时,要躲避障碍栅格。其中,机器人不得不重复走过的栅格有2 个:(右二,上二)的栅格和(右二,上一)的栅格。
通过上述分析可知,作业区域地图信息的栅格化处理给爬壁机器人的路径规划创造了有利条件,但是在执行路径规划的过程中,还必须要充分考虑遍历作业需求的引力作用和障碍栅格的斥力作用。
首先,构建遍历作业需求下的引力场关系,如公式(2)所示。
式中:EY为遍历作业需求及其栅格区域给爬壁机器人提供的引力场;α为遍历作业需求及其栅格区域给爬壁机器人提供的引力场系数;g为爬壁机器人当前位置对应的栅格区域;go为爬壁机器人的目标栅格区域;s(g,go)为爬壁机器人当前位置栅格与目标栅格间的距离;s0为爬壁机器人到目标栅格的距离域值。
根据遍历作业需求下的引力场关系可以进一步计算爬壁机器人所受的引力,如公式(3)所示。
式中:FY为爬壁机器人所受的引力;α为遍历作业需求及其栅格区域给爬壁机器人提供的引力场系数;g为爬壁机器人当前位置对应的栅格区域;go为爬壁机器人的目标栅格区域;s(g,go)为爬壁机器人当前位置栅格与目标栅格间的距离;so为爬壁机器人到目标栅格的距离域值。
其次,构建障碍所在栅格区域的斥力场关系,如公式(4)所示。
式中:EC为障碍所在栅格区域给爬壁机器人提供的斥力场;β为障碍所在栅格区域给爬壁机器人提供的斥力场系数;g为爬壁机器人当前位置对应的栅格区域;go为爬壁机器人的目标栅格区域;s(g,go)为爬壁机器人当前位置栅格与目标栅格间的距离;s0为障碍作用的斥力范围常数。
根据障碍所在栅格区域的斥力场关系可以进一步计算爬壁机器人所受的斥力,如公式(5)所示。
式中:FC为障碍所在栅格区域给爬壁机器人提供的斥力;β为障碍所在栅格区域给爬壁机器人提供的斥力场系数;g为爬壁机器人当前位置对应的栅格区域;go为爬壁机器人的目标栅格区域;s(g,go)为爬壁机器人当前位置栅格与目标栅格间的距离;s0为障碍作用的斥力范围常数。
3 爬壁机器人的全遍历路径规划试验
为了验证该文提出的基于栅格和作用力场的全遍历路径规划方法的有效性,接下来进行试验研究。在试验过程中,以火电厂水冷壁为机器人的巡检和清扫对象,以爬壁机器人为路径规划的实施主体,以水冷壁作业区域地图信息为先验知识(包括障碍物的数量、形状以及所占栅格区域的大小)。
以70 个栅格区域为爬壁机器人路径规划的执行区域,区域水平方向的宽度为10 个栅格,区域垂直方向的宽度为7 个栅格。这里需要指出的是,为了满足爬壁机器人运动学的需求,每个栅格的大小正好适合爬壁机器人的停放、转动。试验过程分为2 组路径规划,第一组是在没有任何障碍物的情况下进行路径规划,第二组是在小区域内设置多障碍物的情况下进行路径规划。第一组试验得到的爬壁机器人的路径规划结果如图3 所示。
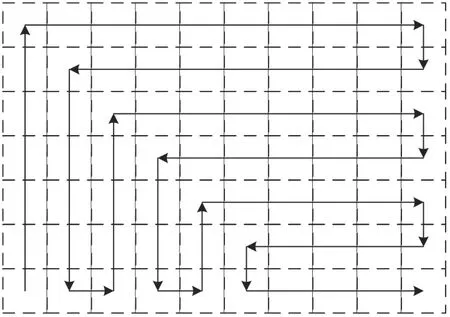
图3 无障碍情况下爬壁机器人规划出的路径
由图3 可知,因为整个地图区域内没有任何障碍物信息,所以爬壁机器人在该文提出的全遍历路径规划方法下计算出了非常有规律的运动路径:爬壁机器人从左下初始位置出发,沿垂直向上的方向遍历最大的栅格长度→沿水平向右遍历最大的栅格长度→沿垂直向下的方向步进1 个栅格长度→沿水平向左遍历最大的栅格长度→沿垂直向下遍历最大的栅格长度→沿水平向右的方向步进1 个栅格长度……如此循环往复,直到遍历完地图内所有栅格。实际上,在图3 给定的地图上,爬壁机器人的运动路径规划可能不止1 种方案。如果在图3 中的出发点爬壁机器人选择先从水平方向向上行进,那么就可以形成全新的规划策略和规划方案。另外,在地图最右侧垂直方向上,现有的路径规划方案是执行了1 个栅格的步进,这个行进单位也可以设置为2 个栅格或其他形式。如果做出这样的改动,那么后续的路径规划方案也都会改动。需要指出的是,这里一直在寻求一种有规律的、有迹可循的路径规划方案。实际上,只要能满足出发点到终点并遍历地图上所有的栅格,非规律的路径规划方案也是完全可行的。
第二组试验得到的爬壁机器人的路径规划结果如图4所示。
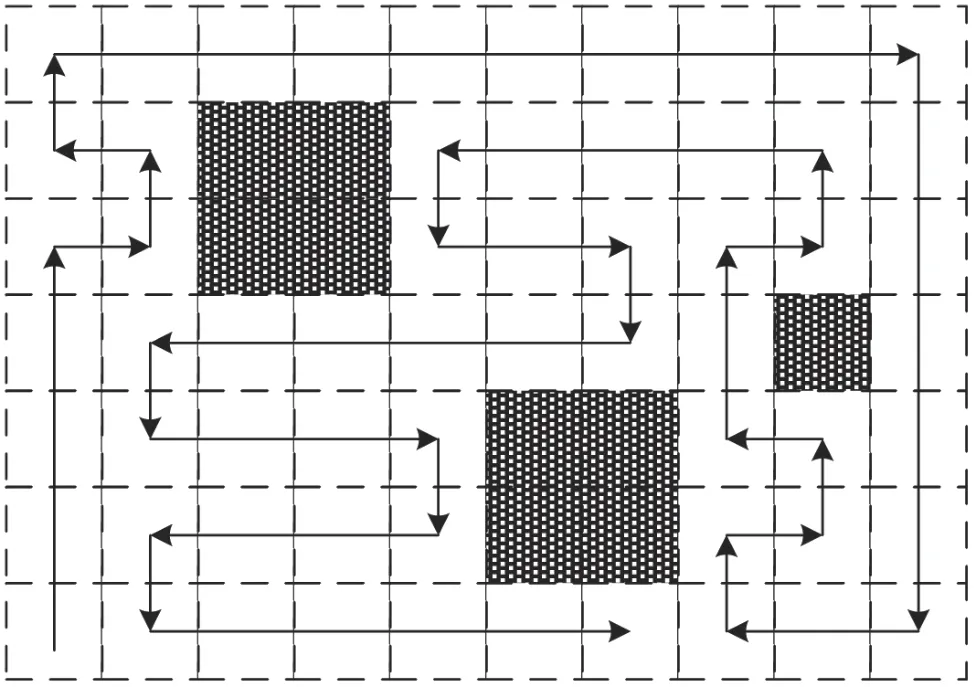
图4 小区域多障碍情况下爬壁机器人规划出的路径
由图4 可知,在70 个栅格区域内存在3 个障碍物,并且其中2 个障碍物占据了4 个栅格区域。多障碍的存在给路径规划工作带来了难度,但是爬壁机器人在该文提出的路径规划方法下,获得了最佳路线方案,没有任何重复运行的栅格。从左下出发位置开始,为了躲避左上障碍区域并遍历完障碍左侧的栅格,爬壁机器人没有一次走完左侧最大栅格长度,而是走了一个“几”字折线。在右上障碍和中下障碍的区域,爬壁机器人仍然走出了“几”字折线。在3 个障碍合围的右中上区域,爬壁机器人走出了多折线、多次折返的路径,不仅成功躲避了障碍区域,而且还实现了遍历所有非障碍区域栅格的目标,达到了最佳的效果。
4 结语
以人工进行火电厂水冷壁的巡检和清扫工作的方式具有效率低、安全隐患大等问题。因此,该文用爬壁机器人自动化巡检作业代替人工巡检和清扫,提出了全遍历的路径规划方法。首先,对爬壁机器人作业时的运动学进行分析。其次,以栅格法联合作用力场法构建了爬壁机器人的全遍历路径规划方法。最后,通过2 组试验证明了所提出的路径规划方法对爬壁机器人自动巡检作业的有效性。对无障碍区域来说,该文提出的方法可以为爬壁机器人规划有规律的行进路径;对多障碍区域来说,该文提出的方法可以为爬壁机器人找到最佳行进路径,不仅可以成功躲避所有障碍,而且还可以实现遍历全部非障碍区域栅格的目标,为自动化巡检作业奠定了基础。
