基于PixHawk飞控的四旋翼无人机清洁系统设计
2023-05-11张唯一冉腾辉赖雅馨毛应彪
张唯一 冉腾辉 石 萌 赖雅馨 毛应彪
(西南民族大学电子信息学院,四川 成都 610207)
1 高空外墙清洁研究现状
高空清洁行业是一个新兴行业,也是一个极具挑战性的行业。当前,高空清洁外墙的清洁方法主要有人工高空悬吊清洗以及爬墙机器人清洗。
经调查,目前很多清洁公司没有资质、专业门槛很低,无法保证清洁设备的质量且70% 的清洁工人没有进行专业培训,缺少超高层建筑外墙清洗的经验。与此同时,高空清洁劳动力成本逐年上升且高空作业还会受天气的限制。这一系列的问题使人工悬吊清洗的难度增加,意外高空坠楼的事件不断发生。
目前,高空清洗机器人的类型有可滑动海绵清洁无人机、滑轨式清洁机器人、双绳索驱动式清洁机器人以及吸附式清洁机器人,但是都存在清洁效率低、清洁区域受限以及成本较高的问题。
针对以上问题,一款安全、高效且成本较低的清洁无人机显得尤为重要。因此,该文设计了基于PixHawk 飞控的四旋翼无人机清洁系统,该系统不仅可以有效代替人工进行高空清洁作业,降低人工风险,而且还能提高清洁工作效率,降低清洁成本。
2 无人机清洁系统
2.1 系统核心
无人机以ARM-Linux 处理器为核心处理器,主要具备以下4 个功能:1) 接收来自接收机传来的S.BUS 协议信号,并对信号进行解析,根据传感器采集的实时状态适当地对原始的S.BUS 信号进行修正,最后将处理后的信号通过异步串口发送到飞控端。2) 实时监测系统的各项参数,必要时能够发出警报或采取风险规避措施。3) 通过 PWM(脉冲宽度调制)控制4 路雾化喷头、1 路电机和1 路水泵。4) 存储传感器的各项数据,并实时同步至MQTT 服务器,供上位机读取。
2.2 无线电通信系统
2.2.1 S.BUS 中继模块
由于飞控和遥控器均使用S.BUS 协议,因此在该协议的基础上进行开发工作是比较容易的。该模块的主要功能为接受来自接收机的信号,并对信号进行处理后再发送给飞控。基于该模块ARM 端可以通过传感器采集的数据实时判断是否对遥控信号进行修正,从而实现飞控的嵌入式二次开发。
2.2.2 S.BUS 协议概述
S.BUS(SerialBUS)是一种串行总线通信协议,仅使用1根信号线就可以实现16比例通道+2开关通道的信号传输,还可以使用串口进行开发。S.BUS 在实际开发中使用串口进行通信,其串口波特率为非标准波特率100 kB,数据位为8位,采用偶校验,停止位为2 位。其帧格式为每25 个字节1帧,第一字节是开始位,一般为0x0F(也可能是0xF0),结束位为最后一个字节,一般为0x00。除了上述的2 个字节以及第二十四字节,其余字节全部为数据位,16 个比例通道由22 个字节表示,每个通道通过字节拼接为11 bit,表示精度可以达到211,即2048。
2.3 数据存储模块
无人机采用SQLite3 数据库,它的优点是不需要服务器、不需要配置、轻便小巧且不需要进程来管理,而是直接对文件进行操作,易于维护且稳定性强,非常适合物联网类的嵌入式设备使用并且其源码不受版权限制,移植相对方便。
2.4 动力驱动装置
无人机采用好盈X6 动力系统套装,自带电子调速器。在23 寸螺旋桨搭配12 节电池的前提下,单个电机可以提供最大12.0 kg 的拉力,四轴提供最大48.0 kg 的拉力。如果要追求较高的能耗比,那么每个电机提供不超过5.0 kg 的拉力,4 轴提供不超过20.0 kg 的拉力,考虑冗余,无人机的最大起飞质量不超过18.0 kg。无人机的各部分质量参数如下:机架5.0 kg,动力电池(2 组格氏16000 mAh 串联)1.8 kg,水箱加水后的质量为4.0 kg,清洁装置(4 路雾化喷头,1 个滚筒)3.2 kg,控制系统1.8 kg,总质量约为15.8 kg,没有超过无人机的最大起飞质量,无人机可以正常起飞。
无人机搭配2 组16000 mAh、15 C 且标准电压为22.2 V的电池串联进行供电(2 组电池是相同的),经过调研和外场调试的数据结果可知,该供电系统可以支持无人机高空作业约50 min。
2.5 机械装置
无人机的机械装置包括翼飞特G06Pro 四旋翼无人机机架、23 寸螺旋桨、6 L 水箱、水泵、滚筒以及雾化喷头,清洁无人机的三维建模图如图1 所示。

图1 无人机三维建模图
在机臂的中间位置设计亚克力卡口装置连接2 根碳纤维棒,纤维棒靠近机尾一端与机臂对齐,靠近机头一端则留出30 cm~40 cm 的距离来安装滚筒和雾化喷头。无人机通过亚克力卡口装置连接清洁装置和机架,实现无人机快速拆卸和组装的功能,有利于无人机被快速运输到目的地进行清洁工作。
2.6 清洁控制设计
由于高空幕墙、高空玻璃等墙面受污染程度不同,因此雾化喷头分为3 种工作模式,即一级模式、二级模式和三级模式。一级模式针对高空幕墙以及高空玻璃等受污染程度较小的墙面,雾化喷头内部倾角最小,清洗面积最广。二级模式与一级模式相比,其内部倾角变大,清洗面积变小,出水量增加。三级模式为直喷模式,出水量达到最大,喷出的水流为水柱状,清洁面积变小,针对墙面附着的鸟粪、沙尘等污物的清洁效果很好。3 种模式通过脉冲宽度调制(PWM)来控制雾化喷头的工作模式,清洁滚筒通过电机带动,滚筒电机配有相应的电子调速器,通过接收机预留的信号通道进行控制,配合雾化喷头的工作模式清洗污染程度不同的墙面。
无人机可以通过遥控信号开启雾化喷头的工作模式,调整滚筒的转速。当清洁某一处墙面或者玻璃表面时,飞手需要将无人机设置为悬停模式,直至清洗干净,再开启无人机的自稳模式,向上或者向下继续清洁。
2.6.1 清洁滚筒
清洁系统的主体为清洁滚筒部分。如图2 所示,电机主轴通过法兰盘与滚筒固定在一起,电机主轴旋转带动滚筒旋转实现清洁功能。2 个滚筒连接处采用自创“T”形杆加2 个轴承装置,一方面配合两边电机带动滚筒防止卡顿,另一方面起到支撑作用,防止清洁装置因滚筒过长、受力而导致中间塌陷。采用滚筒的方式不仅不需要设计与清洁平面接触的缓冲装置,而且滚筒吸水量小,吸水后对前后稳定性的影响小,可以降低飞行过程中的晃动程度。

图2 清洁系统主体部分三维建模图
2.6.2 雾化喷头
水泵抽取水箱中的水或清洁液后经由雾化喷头喷出,雾化喷头设计图如图3 所示。

图3 雾化喷头设计图
无人机机身搭载结构中的STM32F103 芯片在运行状态时需要通3.3 V 或5.0 V 的电压来保证其连续计算能力,该文采购了电池容量为2800 mAh、电压为12.0 V 的充电电池,以保证完成水泵喷洒工作,该锂电池最高的工作功率为60 W。根据测试,当水泵保持满负荷运转时,该电池可以工作约50 min。控制系统中水泵被连接在控制系统的最末端,以完成高空幕墙的清洗工作。水泵的扬程、流量和轴功率是衡量水泵性能的重要指标,其关系如公式(1)所示。
式中:P为功率;Q为流量;H为扬程;ρ为液体密度;g 为重力加速度;η为水泵的工作效率。
根据粗略计算,在满功率工作时,其喷头扬程大约为1 m,从测试过程中可以看出,该水泵能够满足清洗工作的要求[1]。
2.6.3 水箱设计
该文自主设计的无人机水箱装有“井”字形带孔挡板(如图4 所示),将水箱划分为9 个空间,可以降低无人机在飞行过程中因翻转、俯仰以及横滚等一系列操作导致水箱中液体晃动而对无人机整体重心的影响,是保证无人机稳定飞行的创意点。水箱的“井”字形挡板下方是连通的,水箱内部的水可以流动,如图5 所示。水箱盖子为圆形,使其能够固定在无人机上,水箱侧面设计有一出水口,可以连接水泵,水箱整体设计如图6 所示。

图4 “井”字形挡板示意图
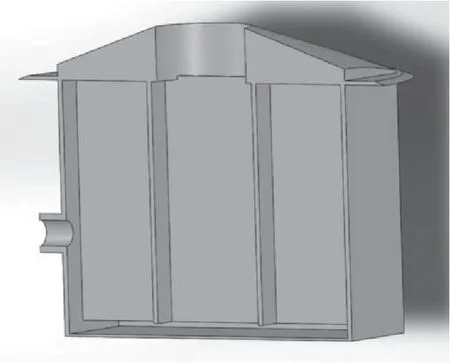
图5 水箱内部结构
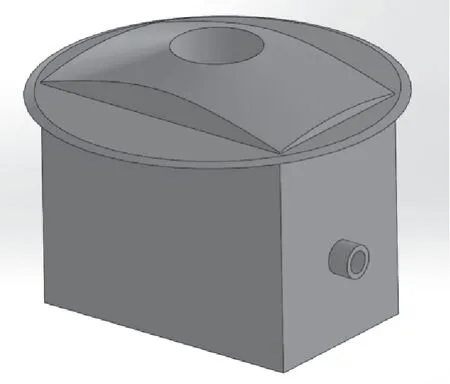
图6 水箱整体设计图
2.6.4 水泵工作状态检测
将有刷水泵的断药信号3Pin(信号引脚线)引脚线接入飞控液位计检测口,断药信号以高低电平信号的形式输出,有水为高电平,无水为低电平。起飞前需要将水泵中的空气排出,以免起飞后误判。指示灯状态说明如下:红灯慢闪(2 次/s),表示无输入信号,需要连接信号线;红灯快闪(10 次/s),表示输入信号错误,信号行程不一致;红灯常亮,表示输入信号正常,水泵关闭状态;黄灯常亮,表示缺水提醒,断药信号输出低电平;绿灯常亮,表示水箱有水,断药信号输出高电平。有刷水泵降压型调速器接线如图7 所示。
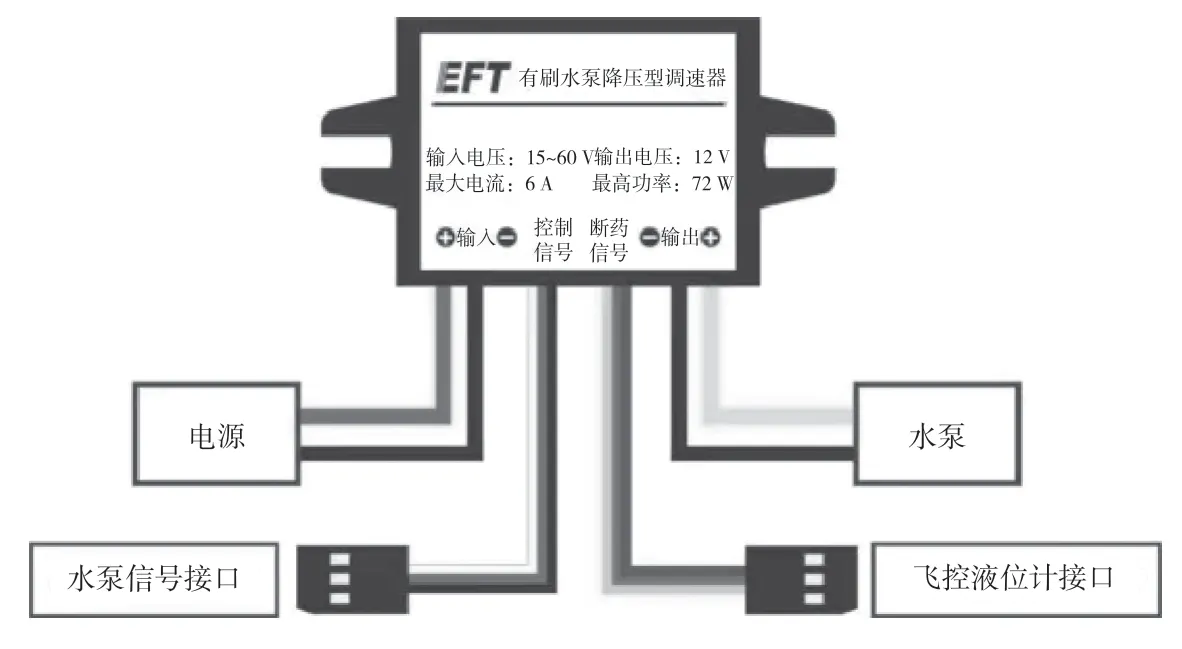
图7 有刷水泵降压型调速器接线示意图
2.6.5 航线规划下的自主清洁的功能
航线规划主要是为了提高规划效率、降低规划时间以及提高无人机飞行作业的安全性[2]。该无人机采用比较成熟的Pixhawk2.4.8 版本的开源飞控,该飞控具备航线规划、自主避障等功能。当无人机起飞到目标位置以及从目标位置返回目的地时,可以通过遥控信号开启无人机的自主航线规划模式,在该模式下,通过调用GPS 确定当前位置,并将起飞点(如果地面站开启返航点刷新,就以地面站的GPS 为准)与当前位置进行比较,从而确定返航方向并自主规划返航航线,也可以通过设置返航高度,在高精度气压计的检测下实现无人机的定高返航,同时配合guidance 视觉避障模块保障无人机返航过程的安全。不用飞手操纵无人机,无人机就可以自主飞行到目的位置,在很大程度上减少由飞手操作失误而导致的故障。
基于Pixhawk 飞控的航线规划功能具体实现方法如下:打开QGC 地面站,使无人机与地面站建立联系。通过终端输入航路点和其他命令,也可以用地面站的功能映射创建任务(Auto grid),无人机会在规划的任务区域飞行,实现无人机的程序化自动控制。
当在QGC 地面站上设置航路点时,需要根据实际情况设置其准确的起飞高度、返航高度以及飞行高度等参数,以确保其航线的可执行性。
在QGC 地面站设置好航路点后,将任务写入QGC 并寄存在存储器中,删除所有航路点,可以通过“读取”查看判断规划的航路点是否写入,如果写入,就会在地图上显示所规划的路径。
对高层建筑来说,往往采用“之”字形航线规划(如图8所示),曲线的每个拐点、起始点以及降落点都是航点,同一高度的2 个相邻航点之间的距离应为2 个滚筒的总长度,不同高度的2 个相邻航点的高度差应为清洁区域的实际高度。

图8 航线规划示意图
3 系统测试
3.1 无人机飞行测试
先进行无人机的飞行测试,在飞行前,摘除桨叶对无人机进行供电并进行校准,以确保无人机能够安全、正常地起飞。完成准备工作后,飞手控制无人机起飞,起飞后可以看到无人机平稳起飞并且可以进行定点悬停。将无人机水箱装满水进行测试,可以实现平稳飞行,飞行测试成功。
3.2 清洁系统测试
在清洁系统方面,清洁滚筒通过2 个电机进行控制,水泵从水箱抽水加压供应到雾化喷头,以实现喷洗功能。利用快拆装置连接无人机的清洁系统,启动清洁装置,检查清洁滚筒能否正常滚动,雾化喷头能否正常喷洗,清洁滚筒工作时轻贴作业面的方式能够降低因与墙面距离过近而产生的压力。滚筒上方的雾化喷头喷出清洁液,整机自动规划路径,模拟人工清洁。
4 结语
针对高层建筑外墙清洁的无人机是市场的重要缺口,其具有很大的产品价值和应用场景。针对高空清洁存在的高风险、高成本和高操作难度等问题,该文提供了一种基于PixHawk 飞控的四旋翼无人机清洁系统的设计方案,希望能够降低高空清洁的成本,为高空清洁行业的发展提供新思路。
