P波段下基于多级盲数字接收机联合的幅相调制信号识别算法
2023-05-11卢英俊张如栩
卢英俊,沈 雷,王 勃,方 铭,张如栩
(杭州电子科技大学 通信工程学院,浙江 杭州 310018)
0 引言
在非协作通信过程中,捕获信号的调制类型识别对后续信号处理流程起到决定性作用[1]。多进制幅相混合调制如多进制振幅相移键控(Multiple Amplitude and Phase Shift Keying,MAPSK)及多进制正交振幅调制(Multiple Quadrature Amplitude Modulation,MQAM)由于幅度与相位同时进行调制,具备频谱利用率高、抗干扰能力强等特点,目前被广泛应用于卫星通信领域[2-3]。
信号调制类型识别的方法有很多种,其中包括:文献[4]利用高次方谱、循环谱等谱特征提取特征参数,频谱抗噪声干扰能力较差,低信噪比情况下识别性能会下降;文献[5]利用最大似然估计算法,需要进行信噪比估计,利用已知的成形滤波器节点系数进行相应的匹配滤波操作,这种识别方式需要一些先验条件;文献[6]采用高阶循环累积量特征对多径信道下的数字调制信号进行识别,在低信噪比条件下识别效果较差。以上识别算法利用的特征提取方式均存在需要在已知先验条件下才能得到理想识别结果的问题。
根据星座图可以观察信号调制过程的幅相信息,直观地对信号类型进行区分。文献[7]利用开环方式对信号特征进行提取,受频偏估计和信噪比影响较大;文献[8]利用相位统计图对信号进行区分,该方式没有利用信号幅度差异的特点,针对相位分布方式相似信号的区分效果不理想;文献[9]利用幅度分布模板对信号进行区分,在低信噪比条件下星座点发散会影响模板匹配,信号识别时需要已知幅度分布情况,且在非合作通信环境下识别效果会下降;文献[10]利用单级接收机对信号特征进行提取,针对信号参数动态范围大的情况,单级接收机的特征提取能力差,算法可复用性不理想。本文提出的基于多级盲数字接收机联合的幅相调制信号识别算法通过对信号带宽与载频进行粗估计,利用粗估计结果自适应调节多级盲数字接收机的内部环路参数,提取环路同步得到的信号瞬时信息,结合多类型特征模板的特点统计相应特征,根据不同信号相同特征结果的差异对信号进行区分。多级盲数字接收机在信息提取过程中利用多种不同的鉴相环路,针对捕获信号的参数范围动态,信号经过成形滤波处理,在采样点数较少的情况下信息提取效果依然稳定,并且在P 波段存在单音信号与语音信号的情况下,具备区分单音信号、语音信号与幅相混合调制信号的能力。
1 信号通用模型
本文提出的基于多级盲数字接收机的调制信号识别算法信号集合包括{单音信号、语音信号、QPSK、8PSK,16QAM,32QAM,16APSK,32APSK}共8 种信号。单音信号模型为:
其中,A(t)表示信号瞬时幅度变化,φ(t)表示信号瞬时相位变化。
幅相调制信号集合包括{QPSK、8PSK,16QAM,32QAM,16APSK,32APSK}共6 种调制类型,其通用信号模型为:
其中,a(n)表示第n个符号的幅度,T为符号周期,表示一个符号的持续时间,gT(t)为均方根脉冲成型滤波器的冲激响应,fc为信号的中心频率,φ(t)为信号的调制相位,在一个符号的持续时间内保持不变,φ0表示信号初相,n0(t)为服从N(0,σ2)的高斯白噪声。
在基于多级盲数字接收机联合的幅相调制信号识别算法中,针对不同信号模型采用不同的鉴相模式,利用多级盲数字接收机联合的信号幅相、频率信息提取方式,确保提取的可用于信号类型区分的特征信息在低信噪比环境下依然保持稳定,并采用幅相、频率信息与多类型特征模板分级匹配统计特征结果,根据特征结果对信号类型进行准确区分。
2 基于多级盲数字接收机联合的信号幅相、频率信息提取算法
文献[10]利用单级鉴相方式对信号幅度信息进行提取,该方式针对不同特点的调制类型信号,在低采样倍数、低信噪比环境下环路跟踪能力下降明显,且仅采用幅度单一特征的识别方式,可识别的信号类型受到局限。为保证信号多类型信息的稳定提取,本文根据识别信号集类型的多样性提出一种多级盲数字接收机联合的信号幅相、频率信息提取算法。
在非协作通信过程中,接收机需要在未知截获信号具体信息的情况下,对信号幅相及频率信息进行提取,信号中心频率fc、符号周期T将作为未知参数存在。为保证提取的信息稳定,幅相、频率信息提取流程如图1所示。

Fig.1 Flow of amplitude,phase and frequency information extraction图1 幅相、频率信息提取流程
首先对采样后的信号进行中心频率估计与符号速率估计,利用估计的中心频率对信号作下变频,利用估计的符号速率Baud对信号进行以4 倍Baud作为采样率的重采样。文献[10]对采样信号识别特征的提取过程中,没有考虑到截获信号在发送端可能经过了成型滤波器处理,信号序列中存在码间串扰,单纯利用载波同步很难恢复信号的幅度特征,因此在进行载波同步处理前需要将信号经过匹配滤波器消除码间串扰,利用定时同步提取每个码元的最佳抽样位置,以提高信号的信噪比,进入载波同步的信号近似一倍采样。经过定时同步的信号采样率为4 倍Baud,经过载波同步的信号采样率近似Baud,利用估计的符号速率Baud调节定时同步环路与载波同步环路中的环路带宽参数,可保证在信号特征提取过程中参数的近似归一化。该处理方式可保证在截获信号参数波动范围较大的情况下,特征提取方式依然可达到稳定的效果,整体特征提取流程保证全自动,且无需人为干预。接收机处理过程中的关键技术包括:
2.1 中心频率估计
高阶幅相混合调制信号作四次方变换后的频谱在4倍中心频率的位置上存在冲激谱线,但在低信噪比环境下这一特征不明显。本文信号信息提取流程中存在闭环的载波同步,因此对中心频率估计精度的要求不高。在信号调制类型未知的情况下,采用对信息序列s(t)作快速傅里叶变换得到功率谱,遍历整个信号功率谱选取峰值最高位置为估计的信号中心频率的方式对信号载波频率进行粗估计。
2.2 符号速率估计
信号的符号速率估计采用包络谱估计的方式,包络谱估计通过将信号s(t)与自身的共轭相乘的方法消除信号的相位信息,得到信号的瞬时幅度信息。其中,信号包络中包含了较大的直流分量,在进行快速傅里叶变换前需要消除直流分量,包络谱中存在冲激谱线的位置对应的即为估计的信号符号速率Baud。包络谱的定义为:
其中,I为直流分量。
2.3 定时同步
本文中的定时同步部分采用Gardner 算法[11],Gardner算法可以不要求改变本地采样时钟位置来实现定时同步,算法通过对接收信号s(t)作插值运算的方式获得最佳采样位置的信号值,保证进入载波同步的信号近似一倍采样,降低载波同步的计算量,同时提高信号信噪比。通过利用2.2 节中估计的符号速率Baud调节定时同步部分的环路滤波器,可保证定时同步部分的环路跟踪性能稳定。
2.4 载波同步
假定载波同步前的信号无噪声影响,则经过抽样的实信号可表示为:
式中,Δφ=φNCO-φ0表示本地振荡信号与输入信号的相位差。当Δφ≈0 时,si(n)≈1/2·I(n),sq(n)≈-1/2·Q(n),此时输出信号基本不带频偏与相偏,可还原基带信号调制时的映射情况。
本文载波同步环路设计中利用的环路滤波器为二阶环路滤波器,滤波器中的噪声带宽BL参数与环路载波捕获能力的稳定性有关,噪声带宽BL与符号速率相关。这里利用2.2 节中估计的符号速率Baud自适应调节噪声带宽,可提高环路跟踪的稳定性。
2.5 载波同步主要鉴相方式
本文提出的多级盲数字接收机载波同步部分以决策树方式建立识别流程,以Costas 环作为架构,采用不同鉴相方式的载波同步对信号幅相与频率信息进行提取。
(1)反正切鉴相环。相较于其他类型信号,单音信号与语音信号具备幅度信息单极性的特点,且相较于单音信号频率恒定、语音信号的瞬时频率时变,选择采用如式(8)的具备快速捕获信号瞬时频率能力的鉴相方式,可提取信号的单极性或双极性信息以及瞬时频率信息。
其中,ud(n)表示鉴相输出结果。
(2)针对MPSK 信号改进的极性判决环。针对单模的调相信号QPSK、8PSK 与多幅度调相信号MAPSK、MQAM的识别,选用一种改进的可稳定提取单幅值信号相位信息的鉴相方式,如式(9)的鉴相方式可稳定提取单幅度信号的瞬时幅度与瞬时相位信息。
(3)高阶幅相调制信号的d次方判决环[12]。对于16QAM、16APSK、32QAM、32APSK 的识别,采用的鉴相器如下:
16APSK 和16QAM 两种信号星座图与分别经过三次方运算后的信号星座图分布对比如图2 所示。观察发现,经过三次方运算的星座点分布更加发散,内外圆半径幅度相差变大,且外圆分布点与传统QPSK 信号相似,外圆相对的信噪比更高,可利用外圆分布点对相位误差进行更新。相较于一般极性判决鉴相器对高阶信号进行同步,这种选择高信噪比星座点进行跟踪的方式更加稳定。

Fig.2 16APSK and 16QAM signal constellation and cubic post constellation图2 16APSK和16QAM信号星座图与三次方后星座图
32APSK 信号与32QAM 信号进行区分时,d=4,如式(10)所示,鉴相方式具备与16QAM 与16APSK 相似的特点。
3 基于多类型特征模板分级匹配的信号识别算法
针对P 波段下包含{单音信号、语音信号、QPSK、8PSK、16QAM、16APSK、32QAM、32APSK}8 种类型的信号集合,本文提出一种基于多类型特征模板分级匹配的信号识别算法,充分匹配与信号幅度、相位、频率相关的多类型特征模板进行信号类型识别。根据鉴相方式分别对应式(8)、式(9)、式(11)、式(12)的1~4 级分级数字接收机对信号的幅相、频率信息进行提取,根据提取信息与多类型幅相、频率模板匹配,逐次统计特征结果:α(同相极性匹配度)、δ(瞬时频率方差)、β(单模等间隔相位分布8PSK 模板匹配度)、ε(单模等间隔相位分布QPSK 模板匹配度)、η(相位分布匹配度)、μ(1幅度轨迹跳变区域方差)、μ(2幅度轨迹跳变区域方差),T0-T6为决策需要的7 个阈值,利用特征结果差异对信号逐次进行区分。信号特征含义将在3.1 节与3.2 节中具体介绍,待识别信号为符号同步输出的信号,基于多级盲数字接收机的信号识别流程如图3所示。

Fig.3 Flow of signal recognition based on multilevel blind digital receiver图3 基于多级盲数字接收机的信号识别流程
3.1 基于同相分量极性与瞬时频率振荡联合的单音信号、语音信号与幅相调制信号识别
针对单音信号、语音信号与幅相调制信号识别,本文提出一种基于信号同相分量极性与瞬时频率振荡的联合识别算法。
(1)基于同相分量极性的单音信号、语音信号与幅相调制信号识别。相较于幅相混合调制信号基带信息为非恒包络的双极性信息,单音信号为单一载波的正弦波信号,语音信号为瞬时频率时变的模拟信号,两种信号在去掉载波后时域体现为单极性。根据这一差异,本文选择鉴相方式为式(8)的锁相环对截获信号进行载波跟踪。当载波同步后,单音信号与语音信号同相支路分量为单极性信息,幅相信号同相支路分量为双极性信息。
假定x1(n)表示信号经过鉴相方式为式(8)的载波同步处理后,输出的第n个幅值结果,则:
(2)基于瞬时频率信息振荡的单音信号与语音信号识别。单音信号与语音信号之间的识别主要利用单音信号为单一载波、语音信号为瞬时频率时变这一差异,单音信号瞬时频率振荡平缓且近似恒值,语音信号瞬时频率振荡幅度较大,统计载波同步频率跟踪结果的方差δ,利用瞬时频率方差δ对两种信号进行区分。
3.2 基于瞬时相位分布与幅度轨迹特征联合的幅相混合调制信号识别
针对{QPSK、8PSK、16QAM、16APSK、32QAM、32APSK}的信号集识别,本文采用一种基于瞬时相位分布与幅度轨迹特征联合的识别算法。文献[8]利用相位分布统计图的识别方式,无法在低信噪比环境下区分星座点相位分布相似的16QAM 与16APSK 信号;文献[9]利用幅度分布模板的识别方式,需要预先知道信号幅度分布特征,但在非合作条件下,这一特征无法预知。以上两种识别方式均存在信号幅度或相位特征利用不全面导致识别效果鲁棒性较差的问题。本文结合信号幅度与相位特点对信号调制类型作出准确区分。
(1)基于单模等间隔相位分布模板匹配的PSK 信号与高阶幅相调制信号识别。相较于高阶的APSK 信号与QAM 信号,单模的PSK 信号更容易进行瞬时信息提取。选择式(9)鉴相方式的锁相环对QPSK 与8PSK 信号进行跟踪,在较低信噪比条件下依然可以还原理想的QPSK 与8PSK 星座图。在信号预处理阶段对信号幅度作归一化处理,首先对跟踪稳定后的信号同相和正交信息与本地理想的8PSK 星座图模板进行匹配,利用单模等间隔相位分布模板匹配度β将信号集分为{QPSK、8PSK}与{16QAM、16APSK、32QAM、32APSK}两类,具体计算公式如式(15)所示:
式中,ΞQPSK表示QPSK 标准星座图模板中的星座点所在区域,匹配度ε初始化为0。
(2)基于相位分布的高阶幅相调制信号识别。对于{16QAM、16APSK、32QAM、32APSK}信号集合的识别,由于星座点情况复杂且密集,全部星座点进行模板匹配受信噪比的影响较大,本文采用选取部分区域星座点的方式进行模板匹配。首先将集合分为{16QAM、16APSK}与{32QAM、32APSK}两类,在符号个数N足够多的情况下,信号每个星座点分布的符号个数近似相等,统计理想基带信号星座点瞬时相位位于{±π/4,±3π/4}区域的点数占比,如表1所示。

Table 1 Proportion of instantaneous phase distribution of different signal constellation points in {±π/4,±3π/4}表1 不同信号星座点瞬时相位分布于{±π/4,±3π/4}的占比情况
16APSK 与16QAM 的理想星座图如图4 所示。由于受噪声和相偏影响,信号的瞬时相位不会与理想情况完全重合。图中虚线与实线夹角θ为统计特征时的允许偏移角度,为瞬时相位信息统计区域。
利用信号经过式(11)中鉴相方式的载波同步后提取的同相信息3(n)与正交信息3(n),统计指定区域内点数与总点数N的比值η,如式(17)所示:

Fig.4 Instantaneous phase matching area of 16APSK and 16QAM signals图4 16APSK与16QAM信号瞬时相位匹配区域
其中,允许偏移相位θ=π/16,相位分布匹配度η初始化为0。利用相位分布匹配度η将信号分为{16QAM、16APSK}与{32QAM、32APSK}两个集合。
(3)基于幅度轨迹特征的高阶幅相调制信号识别。文献[9]利用幅度模板匹配对不同信号进行区分的方式需要预先知道待识别信号集各种信号的幅度分布特点,针对星座点分布与编码方式相关的MAPSK 信号,在纯盲环境下匹配的幅度分布模板与实际信号幅度分布可能存在较大差异。
高阶幅相混合调制信号存在多幅度的特点,本文通过幅度轨迹差异对信号进行区分。理想情况下,对星座图中的星座点按幅度进行逐点升序排序,每个幅度的星座点个数为ki,i=1,2,...,P,P为幅度的个数,信号幅度轨迹跳变位置Lj,j=1,...,P-1 与符号个数N、信号进制M之间的关系为:
将信号集{16QAM、16APSK、32QAM、32APSK}中的信号进制M与幅度个数P逐一代入式(18),不同信号的幅度轨迹特征如表2所示。
Table 2 Amplitude trajectory characteristics of different signals表2 不同信号的幅度轨迹特征
观察表2 可以发现,{16QAM、16APSK}与{32QAM、32APSK}两类信号内都存在幅度个数上的差别,不同幅度分配的星座点数不同,带来了信号幅度轨迹跳变位置上的差异,利用这一特点可以对两类信号进行类间识别。
首先对鉴相器输出的信息幅度|xm(n)|进行排序,得到信息序列Dm(n),计算信息序列Dm(n)的曲率Cm(n):
这里16QAM 与16APSK 的区分利用Lj=3N/4,获得幅度轨迹跳变区域方差μ1;32QAM 与32APSK 的区分利用Lj=3N/8,获得幅度轨迹跳变区域方差μ2。由于QAM 信号在轨迹跳变位置Lj存在幅度跳变,而APSK 信号在轨迹跳变位置Lj的幅度恒定,所以QAM 信号的特征参数μk明显大于APSK 信号的特征参数μk,利用这一特征分别对两个集合进行识别。
4 仿真结果与分析
实验信号集{单音信号、语音信号、QPSK、8PSK、16QAM、16APSK、32QAM、32APSK}为中国电子科技集团某研究所提供的实际卫星信号,由于信号信噪比较大,这里默认为不含噪声的信号,具体参数为:符号速率范围1k~200kBaud,采样频率约为4 倍符号速率,重采样后信号频偏范围为0~0.01 倍符号速率,采样点数为16 384。其中,幅相混合调制信号经过升余弦脉冲成型滤波器,成型系数为0.8。通过MATLAB2020 对采集信号添加带限高斯白噪声,信噪比为6~20dB,以下仿真结果为10 000 次蒙特卡洛实验统计结果。
各信号的同相极性匹配度α随信噪比变化的曲线如图5 所示。取T0=0.7 作为阈值,当α>T0时,判为单音或语音信号,反之为其他信号。

Fig.5 Curve of in-phase polarity matching degree α changing with signal-to-noise ratio图5 同相极性匹配度α随信噪比变化的曲线
单音与语音两种信号的瞬时频率方差δ随信噪比变化的曲线如图6 所示。取T1=0.6e-5 作为阈值,当δ>T1时,判为语音信号,反之为单音信号。
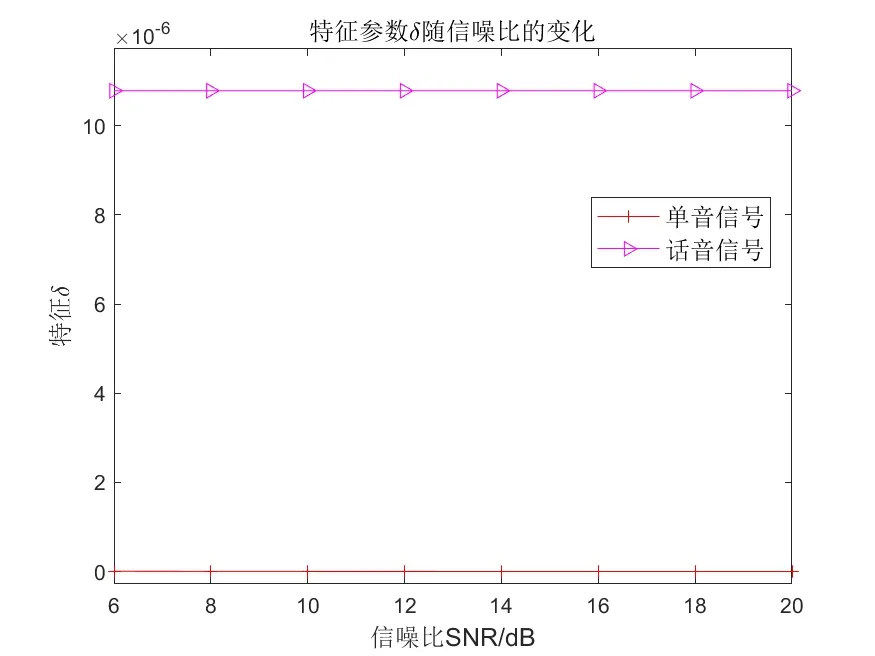
Fig.6 Curve of instantaneous frequency variance δ changing with signal-to-noise ratio图6 瞬时频率方差δ随信噪比变化的曲线
各种信号的单模等间隔相位分布模板匹配度β随信噪比变化的曲线如图7 上图所示,理想情况下,QPSK 与8PSK的匹配度β近似1。由于受噪声影响,QPSK 与8PSK 的匹配度β随信噪比下降而下降,这里选取T2=0.55 作为阈值。当β>T2时,判为QPSK 或8PSK 信号,反之为其他信号。BPSK 与QPSK 的单模等间隔相位分布模板匹配度ε随信噪比变化的曲线如图7 下图所示,理想情况下,QPSK匹配度ε近似1,8PSK 匹配度ε近似0.5。由于受噪声影响,QPSK 与8PSK 的匹配度ε随信噪比下降而下降。选取T3=0.6 作为阈值,当ε>T3时,判为QPSK 信号,否则为8PSK 信号。

Fig.7 Curve of template matching degree β and ε of single-mode equally spaced phase distribution changing with signal-to-noise ratio图7 单模等间隔相位分布模板匹配度β与ε随信噪比变化的曲线
各种信号的相位分布匹配度η随信噪比变化的曲线如图8 所示,理想情况下,16APSK 与16QAM 的匹配度η近似0.5。由于受相位噪声影响,16APSK 与16QAM 的匹配度η随信噪比下降而下降,这里选取T4=0.26 作为阈值。当η>T4时,判为{16QAM、16APSK}信号,反之为{32QAM、32APSK}信号。

Fig.8 Curve of phase distribution matching degree η changing with signal-to-noise ratio图8 相位分布匹配度η随信噪比变化的曲线
幅度轨迹跳变区域方差μ1与 μ2随信噪比变化的曲线如图9 所示。取T5=-16 作为阈值,当μ1>T5时,判为16QAM 信号,否则为16APSK 信号;同理取T6=-16 作为阈值,当μ2>T6时,判为32QAM 信号,否则为32APSK信号。

Fig.9 Curve of variance μ 1and μ2 of amplitude trajectory jump region varying with signal-to-noise ratio图9 幅度轨迹跳变区域方差 μ 1与 μ2随信噪比变化的曲线
分别采用本文提出的基于多级盲数字接收机联合的幅相混合调制信号识别算法、文献[9]提出的对幅度模板匹配的信号识别算法以及文献[10]提出的基于单级接收机提取信号瞬时信息的信号识别算法对实验信号集进行仿真测试。{单音信号、语音信号、QPSK、8PSK、16QAM、16APSK、32QAM、32APSK}在不同信噪比情况下的识别率如图10所示。
观察图10 可以看出,当信噪比高于10dB 时,本文提出的基于多级盲数字接收机联合的幅相混合调制信号识别算法对{单音信号、语音信号、QPSK、8PSK、16QAM、16APSK、32QAM、32APSK}信号的识别率均能达到90%以上。在不相同的信噪比下,针对同一调制类型信号采用本文算法的识别结果均优于其他两种算法的识别结果;当信噪比为8dB 时,其他两种算法已不具备针对部分高阶调制信号类型的识别能力,但本文算法仍具有75%以上的识别率,且文献[9]及文献[10]提出的算法不具备区分{单音信号、语音信号}以及同幅度{QPSK、8PSK}的能力。因此,本文提出算法的整体效果优于文献[9]及文献[10]提出的识别算法。本文算法通过多级数字接收机中不同鉴相方式的锁相环提取信号特征,锁相环在低信噪比条件下,本身具有一定的载波跟踪能力,环路跟踪结果能够清晰反映信号特征,因此本文算法具有较好的识别效果。
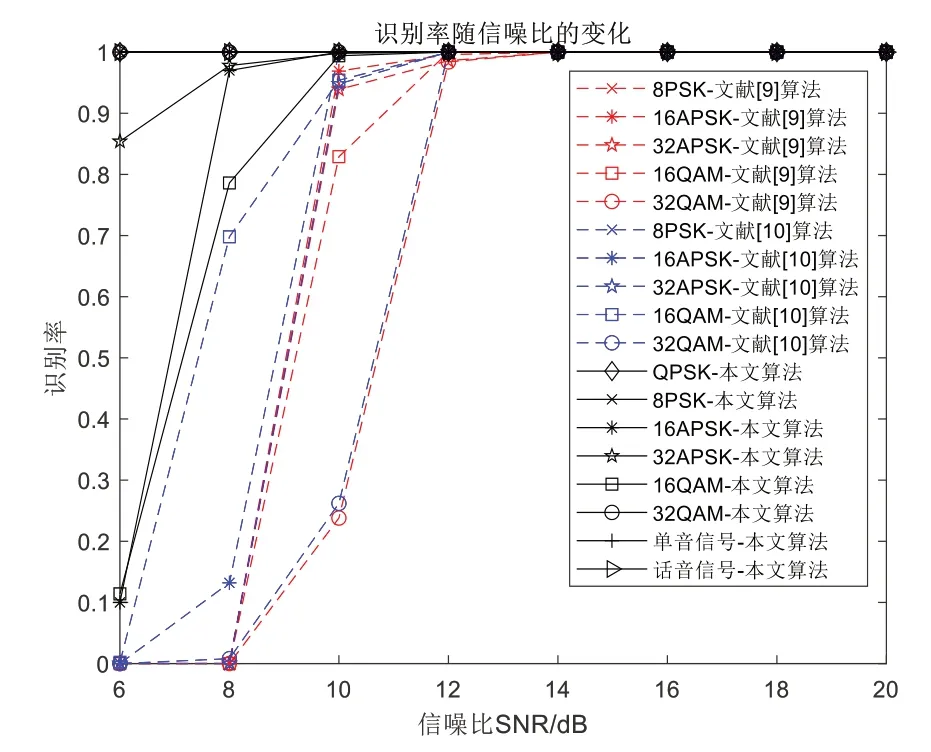
Fig.10 Recognition rate of the three algorithms under different SNR图10 不同信噪比下3种算法的识别率
5 结语
为了解决P 波段下不同幅相混合调制信号与单音及语音信号区分的问题,本文提出一种基于多级盲数字接收机联合的幅相联合调制信号识别算法。采用不同鉴相方式的接收机结构提取信号瞬时信息,利用信息与多类型特征模板分级匹配获得特征结果,根据不同类型信号相同特征结果的差异对信号逐次进行区分。信号信息的提取方式具备抗噪声、抗频偏的优势,多类型特征模板分级匹配的方法充分利用了信号幅相、频率信息的特点,可在恶劣的P波段环境下对信号进行较为准确的识别。
