无人机摄影测量在长江航道整治建筑物监测中的应用
2023-05-10胡乐辰陶孟斯段延松
胡乐辰,陶孟斯,段延松
(1.武汉大学,湖北 武汉 430079;2.长江武汉航道局,湖北 武汉 410014)
长江作为优良航道,航运繁忙,运量庞大,是中国交通运输的重要一环。为保障长江航道运输安全,航道监测具有重要意义。而整治建筑物在航道稳定和改良方面发挥着重要作用,是重要的监测对象。长江干线航道全长2688 公里,整治建筑物数量众多且分布广泛,对监测能力提出了很高要求。整治建筑监测主要内容是检查建筑物完整性及有无损毁情况,传统监测方法主要采用人工方式进行观察、照相、摄像及测量等。由于监测工作量大、效率低,而且航道情况复杂、可达性差,人工巡检难度大,现有监测方法难以有效完成精准监测。针对此问题,本文引入无人机摄影测量技术,在对整治工程区域按一定时间间隔,开展无人机数据获取和处理,生产测区时序化的高精度数字表面模型(DSM)和数字正射影像(DOM)。然后对不同期数据开展分析对比,发现形变位置与形变程度,从而实现航道整治建筑的有效监测。
1 技术原理
1.1 无人机摄影测量生产DSM/DOM
无人机摄影测量的流程与常规航空摄影测量相似,主要包括外业与内业两部分。外业以数据采集为主,内业以数据处理与生产为主。无人机摄影测量的作业流程如图1所示。
实施外业时需要对测区情况有基本的了解,并依照测区特点、成果要求和气象条件制定适宜的航摄计划,并在作业前做好设备的调试检查工作,保证作业安全[1]。
内业工作中,空中三角测量是关键的步骤。空中三角测量能通过获取航摄像片上同名点和必要的控制信息恢复影像的空间位姿,进而测算任意影像点的空间位置。这种方式不直接触及被测目标,不受地面通视条件限制,即可测定目标位置与几何形状,并能快速进行大范围目标测定[2]。DSM 产品包含建筑、植被等地物的高程信息,能真实地表达地面实际起伏情况,DOM 是目标区域的无变形影像,地物直观、信息丰富,能客观反映地表现状。DSM/DOM产品被广泛用于城市规划设计、土地管理、植被监测、环境分析、地质灾害预警等领域[3]。
1.2 整治建筑物形变监测
获取时序化DSM/DOM 数据后,选择两期数据进行对比,即可发现形变位置与形变程度。为了进行有效对比,本文提出了结合DSM 差异和DOM 匹配的形变检测法。该方法首先根据DSM 的地理信息计算其高程差异,发现形变位置,然后对形变区域的两期DOM 进行影像匹配,获取同名点,根据同名点的位置变化,标识出形变方向与距离。其技术流程如图2所示。
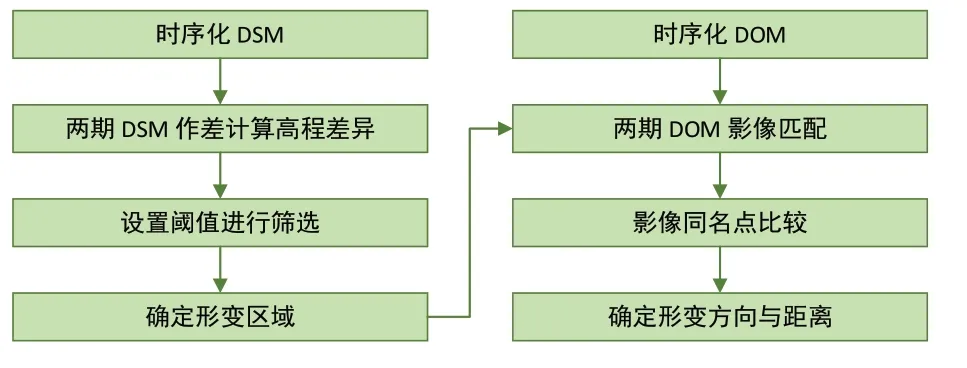
图2 整治建筑物监测技术流程
1.2.1 DSM 差异发现变化区域
比较两期DSM 的差异,最简洁有效的方法是作差运算。在对不同时相的两个DSM 作差时,需保证DSM对齐,这样才能保证检测形变的有效性。DSM 差异分析原理如图3所示。

图3 DSM 差异分析示意图
根据DSM 作差结果,可以得出地形起降情况,并可判断形变程度及确定关注区域。在此基础上,设定阈值以避免数据噪声对形变区域的判断产生影响。
1.2.2 DOM 匹配实现平面变化
影像匹配是在两幅(或多幅)影像之间识别同名点。本文通过Harris 算子4 在两期影像上提取特征点,然后基于相关系数法对两幅影像的特征点进行匹配,从而获得两期影像的同名点。
Harris 算子是一种角点提取算子,它计算相对简单,提取精度较好,是实际处理过程中常用的算子,适合快速提取大量特征点,其计算方法如公式(1)所示:
其中,gx,gy是影像在x,y 方向上的梯度;为高斯模板;k 为默认常数;I 为计算的兴趣值。设定阈值,选择一定范围内兴趣值最大的若干点作为特征点。
相关系数法是一种常见的匹配方法,通过计算两期影像特征点邻域的相关系数,衡量两期影像特征点是否匹配,其计算方法如公式(2)所示:
其中gi,j,hi,j表示计算相关系数的两个特征点的矩形邻域;,为两个邻域各自的平均值;m,n 为两个邻域的宽高;为两邻域的相关系数,并作为特征点的相关系数。通过相关系数衡量特征点的相似程度,超过阈值视为特征点匹配成功。
经过影像匹配,可获得同一地面点在两期DOM 上的平面坐标,进而计算同一地面点的形变位移。比较同名点在两个DOM 上的位移时,同样需保证对齐。
2 工程实例
2.1 测区情况
实验测区位于长江武汉航段,监测对象为航段某处坝体,测区沿坝体走向呈狭长的“一”字型。由无人机分别于2021年1月与同年12月拍摄两期航空影像数据。如图4所示,控制点覆盖整个测区,以实现良好的控制,两期数据使用相同的控制点,以保证生产的DSM与DOM 成果对齐。
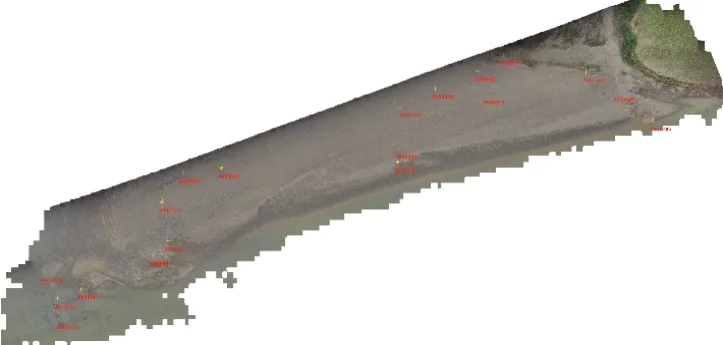
图4 测区略图
2.2 结果分析
完成无人机摄影测量内业平差处理后,DSM 差异分析结果如图5所示。设定阈值 ,坝体整体差异较小,高程差异小于 ,以绿色标出;局部差异较大,高程差大于 ,以红色标出。
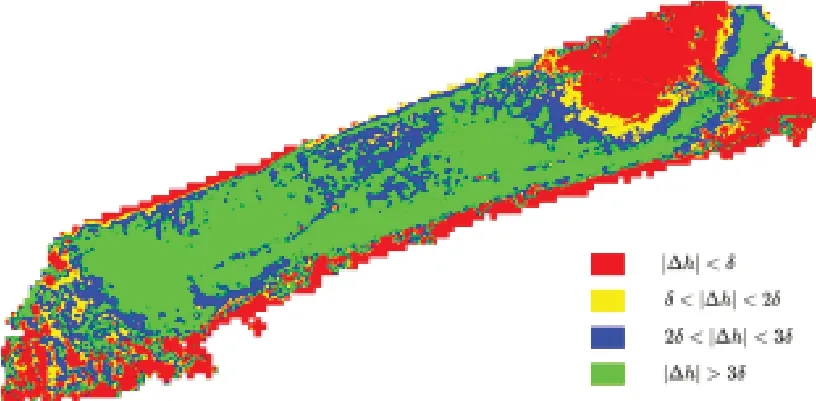
图5 DSM 差异分析结果
坝体四周的环状红色区域,由水面造成。虽然水面对涉水区域的匹配存在影响,但由于监测目标为坝体而非水位,因此出现此类差异并无影响,不列入关注区域。测区东北处的红色区域,实为一荒草地。该区域存在植被,坝体受河流冲刷影响小,且无裸露坝体,故同样不列入关注区域。
选择某一关注区域的两期DOM 进行同名点匹配,结果如图6所示。对匹配的同名点坐标作差,可得同名点的形变方向大小。向量可视化结果如图7所示,大部分同名点的形变量较小。除去若干孤立的大形变量同名点,形变主要出现在一条带状区域内。该区域可能因水流的冲蚀搬运作用而产生了位移形变。但形变主要是淤泥乱石的位移。坝面的砖块的形变较小,基本保持稳定,但后期仍需要密切关注。
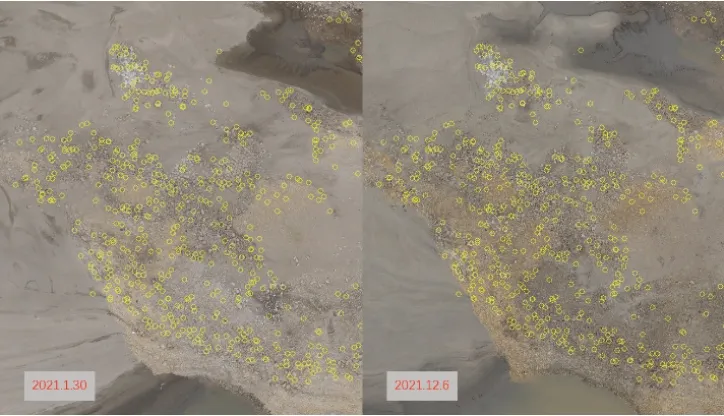
图6 两期影像关注区域同名点匹配

图7 形变可视化
3 结论
本文提出了一种基于无人机摄影测量的航道整治建筑物动态监测方法。实测结果表明,本文方法能够简单有效地对航道整治建筑物形变情况进行监测,并及时发现形变位置,能一定程度上减轻传统测量方法中工作人员的内外业负担。本文基于无人机摄影测量方法的精度,主要依赖于摄影测量数字产品的质量,以及后续数字正射影像匹配质量。对淤泥地带与重复纹理区域而言,当前的匹配算法还存在一定的局限,会影响到形变的定量。在不久的将来,若能够进一步解决此类区域的影像匹配问题,则本文方法对整治建筑物的监测将能发挥更大的潜能。

