多机联合低空数据处理的关键技术研究
2023-05-06肖凯温梦媛刘晓光尹洪凯
肖凯 温梦媛 刘晓光 尹洪凯
(1.广东龙泉科技有限公司,广东 广州 510220; 2.河南省测绘院,河南 郑州 450003)
1 概述
无人机遥感系统的优点为自主飞行、低空作业、无需机场起降,以及具有获取厘米级高分辨率影像的能力,同时以无人机获取的影像为基础,通过内业航测数字化成图流程,可便捷地测制大比例尺地形图、构造地面三维模型,为政府决策部门和高端专业用户提供所需数据与地理信息产品。但由于无人机遥感系统装备的相机普遍存在相机幅面小、无人机留空时间短等缺点,原始影像的获取效率不高,面临大范围航测工程时显得力不从心。如何提高无人机遥感系统的快速获取能力,降低数据处理的复杂度,是当前低空遥感领域数据后处理关键技术的研究热点和技术瓶颈。
2 低空遥感数据处理
结合无人机影像后续处理的技术方法、流程及关键问题,探讨无人机影像处理生产中遇到的技术瓶颈,并与当前较为成熟的主流商业软件进行对比分析,形成了一套独具特色的一体化多机联合模式数据处理流程,并在项目生产中进行应用。具体流程如图1 所示。
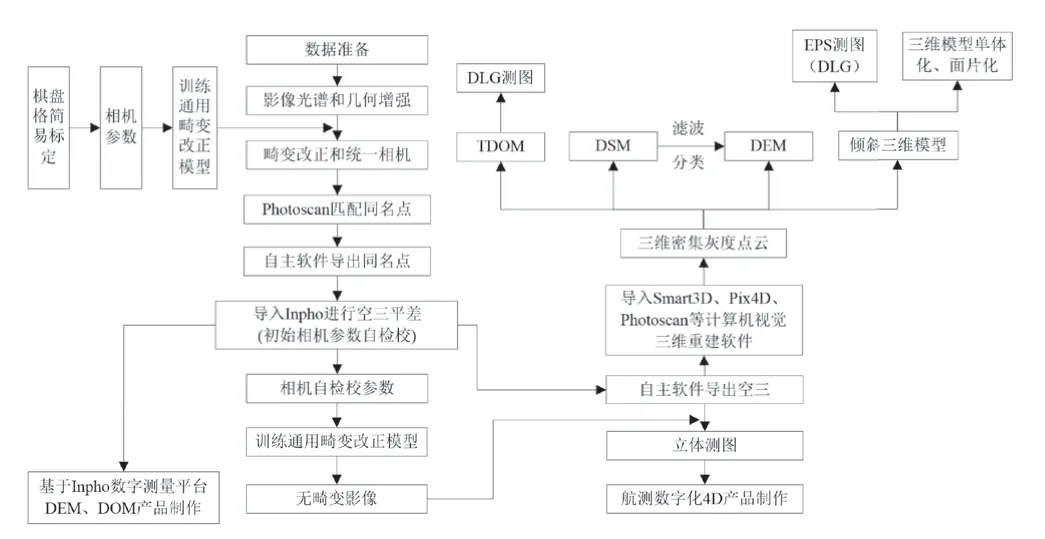
图1 多机联合数据处理技术流程
2.1 航测数据预处理
2.1.1 POS 数据与航带整理
无人机航测POS 原始数据是明码TXT 格式数据或者EXCEL 表格数据,详细记录了POS 记录序号、拍照时间、像片名称、像片曝光点具体位置(经度、纬度和椭球高),以及曝光瞬间无人机姿态ROLL、PITCH、YAW(横滚角、俯仰角和航偏角)。在获取测区航飞数据后,立即导出或者让无人机链路传输无人机航测POS 数据,现场辅助检查飞行相对漏洞或绝对漏洞,以便及时发现问题并进行补飞。
由于POS 原始数据中空间位置信息是大地坐标格式(B,L,H),而摄影测量处理软件一般需要平面坐标格式(x,y,h),因此需要进行坐标格式转换。转换前需整理POS 原始数据,仅要像片名称、经度、纬度、高程、横滚角、俯仰角和航向偏角,剔除其他无用信息,并且使数据格式符合坐标转换软件要求。将整理后的POS 数据加载到ArcGIS 软件,并用(x,y)坐标生成点文件,查看POS 所构建的航带信息。保留测图区域范围内及因航向重叠而部分超出范围的POS点,删除冗余的POS 点数据。同时观察POS 点序号即像片ID 顺序,得出无人机航测时大致航向和拍照顺序。
2.1.2 像片方向旋转
通过航带整理发现,无人机航测时飞行顺序随意,并非一条航带自西向东地起降,下一条航带则应是自东向西地起降。无人机的航带次序整理及其航摄飞行方位确定将对测区像片排列产生重大影响。当无人机自西向东地飞行时,像片将被逆时针旋转90°,而且在空中保存;当无人机自东向西地飞行时,像片将被顺时针旋转90°,而且横向保存,如图2 所示。在处理航测数据时,必须将其恢复到像片在视频上拍照的方向,保证相片拼接和重叠。
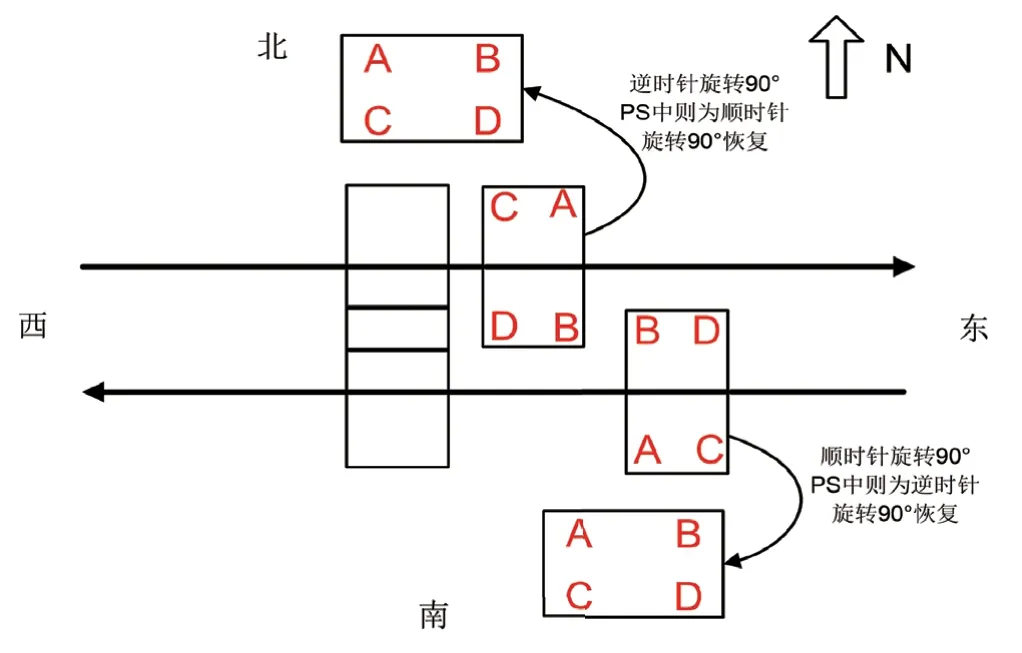
图2 像片旋转示意图
2.1.3 像片畸变改正
数字影像纠正的基本任务是实现两个二维图像之间的几何变换,因此首先应确定原始图像与纠正图像间的几何关系[1]。正解法是从原始图像出发,将原始图像上的逐个像元素按正解公式X=φx(x,y),Y=φy(x,y)求解纠正后的像点坐标;反解法是由纠正后的图像反求其在原始图像上的像点坐标,运用灰度插值法来实现图像改正[2]。通过建立数学模型完成畸变图像和改正图像的相互转换及影像纠正,并对边缘地区影像进行自动裁切,达到预先定制的影像宽高。
2.2 空中三角测量
实际作业采用PixelGrid、Photoscan、Inpho 等专门针对无人机影像特点的无人机影像快速处理模块(空三加密流程如图3 所示)。在相对定向和模型连接完成后,针对因航飞不稳造成模型连接不稳的地方,定义航带初始偏移量时适当增加偏移点个数,提高模型间自动转点的成功率和精度。对于部分自动连接失败的模型,通过人工干预增强模型连接强度[3]。一般应当保障所有同航向相邻影像同名像点均不小于7对,所有隔片影像间同名像点(模型连接点)不小于3 对。经过反复实践证明,达到这个条件会显著提高自由网的构建成功率、整网的刚性及空三解算成果的可靠性。
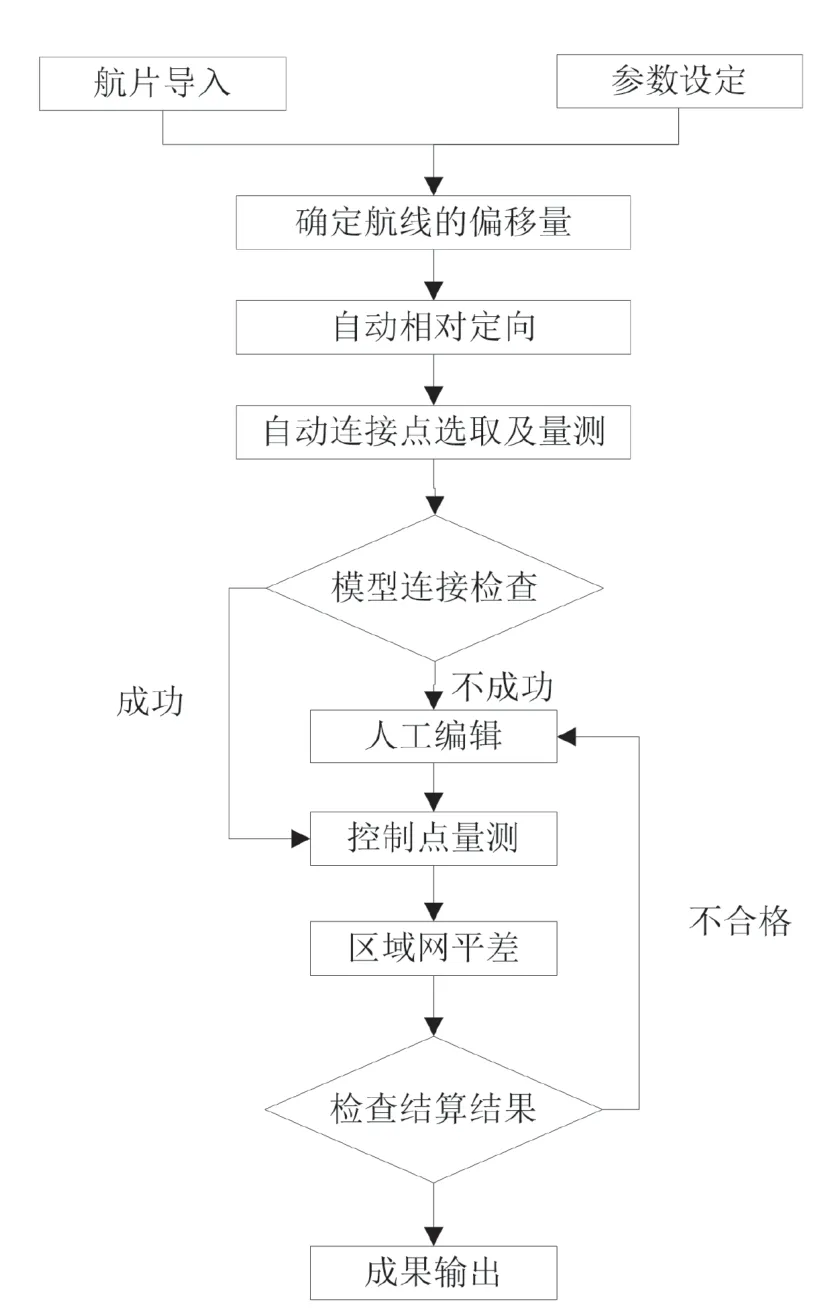
图3 无人机航空影像空三加密流程
连接点提取是无人机数据处理的关键,是利用少量地面控制点计算所有加密点地面坐标的必经操作。虽然各软件可自动提取连接点,但由于航摄过程中可能会出现影像质量不理想、影像重叠度不完全一致和旋偏角偏大等情况[2],连接点质量需利用检查软件进行人工检查。
3 关键技术创新
以VC++6.0 为开发语言,利用OPENCV 和GDAL/OGR 开源视觉算法开发基于棋盘格检校的几何标定软件,提出了数码相机镜头畸变参数通用表达方法,建立畸变改正通用模型,来实现原始影像的快速畸变改正。基于透视光线保持不变的原理,利用特殊的数字影像升采样算法,自主开发软件来自动实现同测区多相机统一参数处理,实现后处理中将多相机数据进行统一的参数规划,实现同一区域网、同一套航摄相机参数进行数据后处理[4]。基于改进灰度补偿算法的数字图像纹理增强技术,利用OPENCV 直方图匹配算法实现数字影像色彩批量优化调整;开发空三加密工程转换工具,实现Inpho、Photoscan 等国外主流软件以及国内主流软件之间空三加密成果数据转换;开发基于密集三维真彩色点云的若干成果应用场景。
3.1 数字影像纹理增强
纹理特征是数字影像的重要表征指标,纹理清晰是数字影像追求的最好感官目标。数字影像的灰度直方图是数字影像的身份证。一幅影像直方图的均值和方差是最好的统计表征,均值适中的影像一般表现为影像亮度合适人眼感官。方差越小,灰度直方图表现收窄,代表影像灰度级并不充满,感官层次不丰富,纹理单一;方差越大,灰度直方图表现拓宽,代表影像灰度级分布充盈,感官层次丰富,纹理丰富。数字影像纹理增强的总体目标就是对数字影像的各个波段进行定制或者自适应调整,达到均值亮度适中,方差对比度合适,提升图像细节表现力和解析力。
本文在VC++6.0 开发环境下实现了一种改进的灰度补偿算法来实现图像的纹理增强,有效弥补了传统灰度图像直方图均衡化算法的不足,不仅提供了合适的映射关系,还大大改善了运算效果,最大化减少了图像信息的丢失,提高了图像的清晰度,特别是对于质量较差的原始图像,采用该算法进行图像增强处理也可以取得较好效果,在空三处理过程中显著提高了初代匹配种子点的数量和同名像点匹配成功率。
3.2 数字影像色彩优化
色彩表现也是数字影像的重要感官指标,在色彩优化方面基于VC++和GDAL/OGR 进行软件开发,通过OPENCV 直方图匹配算法实现数字影像色彩批量调整。色彩调整处理函数采用逐波段直方图匹配算法,即给定特定函数分布,实现图像某通道的直方图分布与给定的函数形态趋于一致或相似。自主开发软件中涉及的直方图匹配支持TIF、BMP、JPG 等格式影像,对超大影像数据的处理采用*img 格式。软件可以对海量数字影像进行快速色彩调整集群批处理,对数目庞大的无人机影像进行色彩预处理,能显著改善DOM 的整体拼接质量,在无人机测绘工程中具有很强的实用价值。
3.3 空三加密工程转换工具
当前业内流行很多国内外的空三加密软件,核心就一个,即通过空三加密恢复摄影瞬间各个摄站在测量坐标空间中的空间位置和姿态。软件的工序流程都包括两部分:(1)自动或手动匹配提取同名像点,构建像点测量网即自由网。(2)联合地面控制点或者其他现验控制约束条件进行联合平差,平差时自动或手动剔除上一步骤误匹配点,达到预期的收敛限差和置信度即可。由于软件各异,各个加密软件输出的最终加密成果格式和类型不同,产生了数据壁垒。本研究通过自定义统一的中间格式,实现各大主流软件之间的空三加密数据成果的桥联,即所有格式都可自动转换为本软件研究设计的中间格式,然后由中间格式按设置选项分转成各大主流软件的数据成果格式,如此统进统出就解决了格式混乱中规划统一的问题,这在无人机测绘工程数据后处理过程中有巨大的使用价值。
3.4 密集三维灰度点云研究和应用
本文提出基于密集三维灰度点云拓展的应用,自主开发软件实现利用密集三维灰度点云制作TDOM、DSM、DEM、测制线划图,构建修饰倾斜实景三维模型,并实现实景三维模型的快速单体化和面片化。此外,尝试将密集三维灰度点云为无人驾驶和智能飞行器安全运行提供底图服务保障。
4 创新应用
项目通过长期产学研紧密合作,对多机联合低空遥感关键技术研发存在的技术难题进行了攻关,主要创新点如下:
(1)引入数字影像升采样方法,改进同测区多相机统一参数算法模型,将多相机、多参数归化为统一相机参数,实现了同测区不同相机、不同摄影时间的数据不分区一次空三加密[5]。基于保持透视光不变原理,提出一种基于数字图像上采样的多摄像机统一参数方法,实现同一测区多摄像机图像的自动处理,及影像数据后处理只设置一个相机参数不分区即可处理,降低了多相机联合测区的数据后处理难度,显著提高了参数解算效率,保证了结果的准确性和可靠性[6]。
(2)改进了基于棋盘格标靶的相机标定方法,提出了相机镜头畸变参数的通用表达、可量测粒度的相机几何定标、影像质量评价方法。通过研究无人机遥感系统数据获取方式,分析无人机获取数据类型,提出可量测粒度的相机几何定标、数码相机畸变通用表达设计思路,建立了映射模板,开发了棋盘格相机几何标定软件,实现非量测相机影像畸变的精确改正[5]。
(3)研发了适用于非量测相机的纹理增强、色彩优化、密集三维灰度点云应用等功能,建立了多机联合航测遥感的新作业模式,提高了生产效率和成果质量。处理图像细节时,保留图像本身地物信息,通过改进灰度补偿算法,采用分段直方图均衡化和分段直方图匹配技术对图像进行预处理,通过增强图像的动态范围来增强图像的细节表现能力。色彩调整处理采用改进型直方图匹配算法,影像纹理增强和色彩优化处理时在单机上实现多进程处理,在局域网内实现多计算机联合处理,显著提高了工作效率。
(4)研发了适用于Inpho、LPS、Photoscan、PATB等多种商业空三加密软件的多相机数据转换工具集,实现不同软件数据的兼容和无损转换。建立标准中间件,由现有商业软件通过该标准中间件转入,再经由标准中间件转出到目前业内主流商业软件,从而构建空三加密转换工具集,实现数据的互转换,充分发挥各个商业软件的优势功能,提高空三加密精度和效率。
通过研究无人机影像数据畸变改正、纹理增强、色彩优化、非量测相机标定、空三加密数据转换、密集三维灰度点云、多相机统一参数联合平差等关键技术,形成一套科学合理的多机联合低空遥感数据处理技术流程。
5 结束语
多机联合低空数据处理技术有效提高了航测数字化生产效率和生产质量[7]。实际作业利用该技术完成相机参数检校、数字影像批量光谱和几何增强,及影像的畸变改正、匀光匀色和纹理处理。同时利用项目空三加密转换工具实现无人机测图系统、Photoscan、Inpho、PATB 之间的数据转换,通过计算机视觉三维重建软件输出三维密集灰度点云,为数字测量成果和倾斜三维模型生产提供保障,为智慧城市建设、自然资源监测、生态保护修复、国土空间规划等领域的低空遥感影像处理提供了新手段,拓宽了数字化生产的技术模式,降低了航测产品购买成本,提高了工作效率。
