AIS 环境下船舶智能化通行决策优化算法
2023-05-04李简凡孙海燕
李简凡,孙海燕
(同济大学 交通运输工程学院,上海 200092)
0 引 言
世界航运业在经济全球化的刺激下获得了迅猛发展,加上船舶工业的技术进步,使得港口和海上航线的船舶交通密度不断增加,船舶碰撞事故也越来越多。船舶会遇过程的碰撞风险主要与2 个因素有关;一是船舶的大型化、高速化发展,使船舶会遇时的惯性更大,发生碰撞的概率更高;二是航线或港口的船舶密度高,在多艘船舶的会遇过程中,船舶航向、航速控制难度更大[1]。
船舶会遇过程的通行决策对于船舶避碰控制有重要意义,本文基于AIS 船舶自动识别系统和神经网络算法,研究船舶会遇过程的通行决策和路径寻优问题,有助于解决船舶在港口和拥挤航线的碰撞问题。
1 船舶自动识别系统AIS 的研究
船舶自动识别系统(AIS )是通信、计算机、传感器等技术的融合产物,在船舶导航、交通管理等方面有成功的应用。
船舶自动识别系统AIS 的船载终端示意图如图1所示。

图1 船舶自动识别系统AIS 的船载终端示意图Fig.1 Schematic diagram of shipborne terminal of the automatic identification system AIS
AIS 系统主要由GPS 及雷达设备、AIS 信息处理器、VHF 收发机、AIS 显示终端以及各类传感器组成,详细如下:
1)GPS 及雷达设备
GPS 及雷达设备为AIS 系统提供船舶定位功能,包括船舶的经纬度、船舶航行状态数据等,能够提高AIS 系统的定位和导航水平。
2)AIS 信息处理器
信息处理器是AIS 系统的核心,信息处理器的数据库分为静态数据库和动态数据库2 种,其中,静态数据库负责存储和处理船舶识别编码、货运类型、船舶类型等静态数据;动态数据库负责存储和处理船舶的航行速度、位置、航迹等动态信息。
AIS 信息处理器的数据通信基于SOTDMA 技术,为了使处理器与AIS 系统其他设备之间的信息同步,提高信息传递的精度,通常采用GPS 的UTC 时钟进行同步。
AIS 船舶自动识别系统的通信报文格式如图2 所示。

图2 AIS 船舶自动识别系统的通信报文格式Fig.2 AIS Ship Automatic identification system communication message format
3)VHF 收发机
船舶自动识别系统的VHF 收发机[2]是进行谐波信号发射和接收的部件,AIS 系统的船舶数据通信发生在船舶与岸基设备之间、船舶与船舶之间,采用谐波信号能够保障数据传输的精度。
4)AIS 显示终端
AIS 显示终端可实时显示AIS 系统的船舶动态信息,并在显示界面提供多种可视化工具,比如数据调用工具、船舶呼叫工具等。
5)传感器
AIS 系统的传感器主要负责船舶动态信息的采集,包括导航仪、陀螺仪、计程仪等。
卫星导航仪:差分卫星导航仪作为定位传感器,为AIS 系统提供本船经纬度和UTC 时钟。
陀螺仪:为AIS 系统提供船舶的航向信息,陀螺仪具有数模信号转换的功能。
计程仪:计程仪可以采集船舶的航速信号,并将数字信号传送至AIS 系统的信息处理器。
2 基于AIS 系统和自适应神经网络的船舶智能化通行决策算法
2.1 自适应神经网络
自适应神经网络算法是基于人体神经元信号传输的仿生学,近几年随着计算机技术的发展,自适应神经网络算法获得了较快的发展。
自适应神经网络的关键环节包括信号输入、加权、求和、激活函数处理等,图3 为自适应神经网络算法的原理图。

图3 自适应神经网络算法的原理图Fig.3 Schematic diagram of adaptive neural network algorithm
自适应神经网络算法流程如下:
1)初始化
自适应神经网络首先进行神经元和权值的初始化,神经元赋予(-1,1)的随机数作为权重δi(t),xi(t)为输入信号,设置权重的值域Si(t)和最大迭代次数M[3]。
2)加权与求和
神经网络算法的加权模型为:
其中,f(t)为网络的效率函数。
3)激活函数处理
本文采用Sigmod 激活函数进行神经网络算法的处理,该函数是一种指数函数,具有严格单调特性[3],函数公式为:
Sigmod 激活函数曲线如图4 所示。
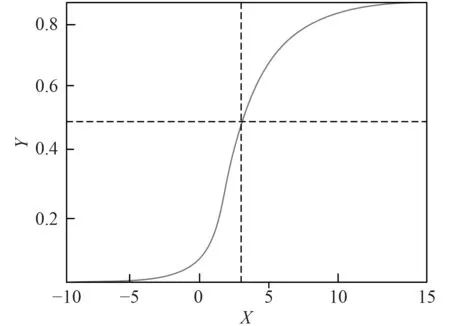
图4 Sigmod 激活函数曲线图Fig.4 sigmod activation function graph
4)信号输出
针对船舶通行过程的寻优问题,自适应神经网络的输出信号为:
2.2 船舶会遇过程的通行决策优化和数学模型
在船舶会遇过程中,船舶长、宽、速度、会遇角度、航向角等参数都会影响船舶的航行安全,建立船舶会遇过程的运动坐标系如图5 所示。

图5 船舶会遇过程的运动坐标系Fig.5 The frame of motion in which the ship will encounter the process
基于该坐标系,船舶会遇过程的矢量建模包括速度与相对速度矢量建模、距离与会遇角度建模。
1)速度矢量
定义本船速度矢量为:
目标船只的速度矢量为:
其中:Vox,Voy为本船速度在2 个方向的分量;Co为本船的航向角;VOX,VOY为对方船舶速度在2 个方向的分量;CT为对方船只的航向角[4]。
2)相对速度矢量建模
其中:VR为相对速度大小;CR为相对速度方向。
3)两船相对距离
两船坐标分别为(x0,y0)和(xT,yT),则相对距离为:
4)两船相对转角
两船相对转角计算为:
式中,θ为坐标系转换角。
2.3 基于自适应神经网络的AIS 系统路径搜索技术
本文结合AIS 系统和自适应神经网络研究船舶会遇过程的智能化通行决策技术,利用AIS 系统中的船舶航迹数据及船舶位置数据,在船舶会遇时进行航线的规划。
基于自适应神经网络算法的船舶智能化通行决策优化流程如图6 所示。
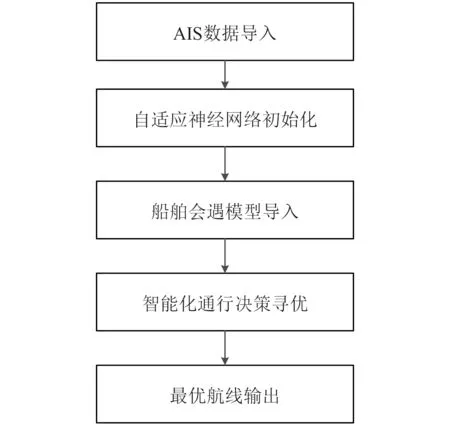
图6 船舶智能化通行决策优化流程图Fig.6 Flow chart of intelligent vessel passage decision optimization
针对本文提出的决策优化算法,利用Matlab 仿真平台进行船舶会遇过程的路径寻优仿真,仿真模型本船船长279 m,船速6.5 m/s,船位(30°N,123°E);会遇船舶船长185 m,船速5 m/s,船位(60°N,80°E)。船舶会遇过程的智能化通行决策仿真如图7 所示。
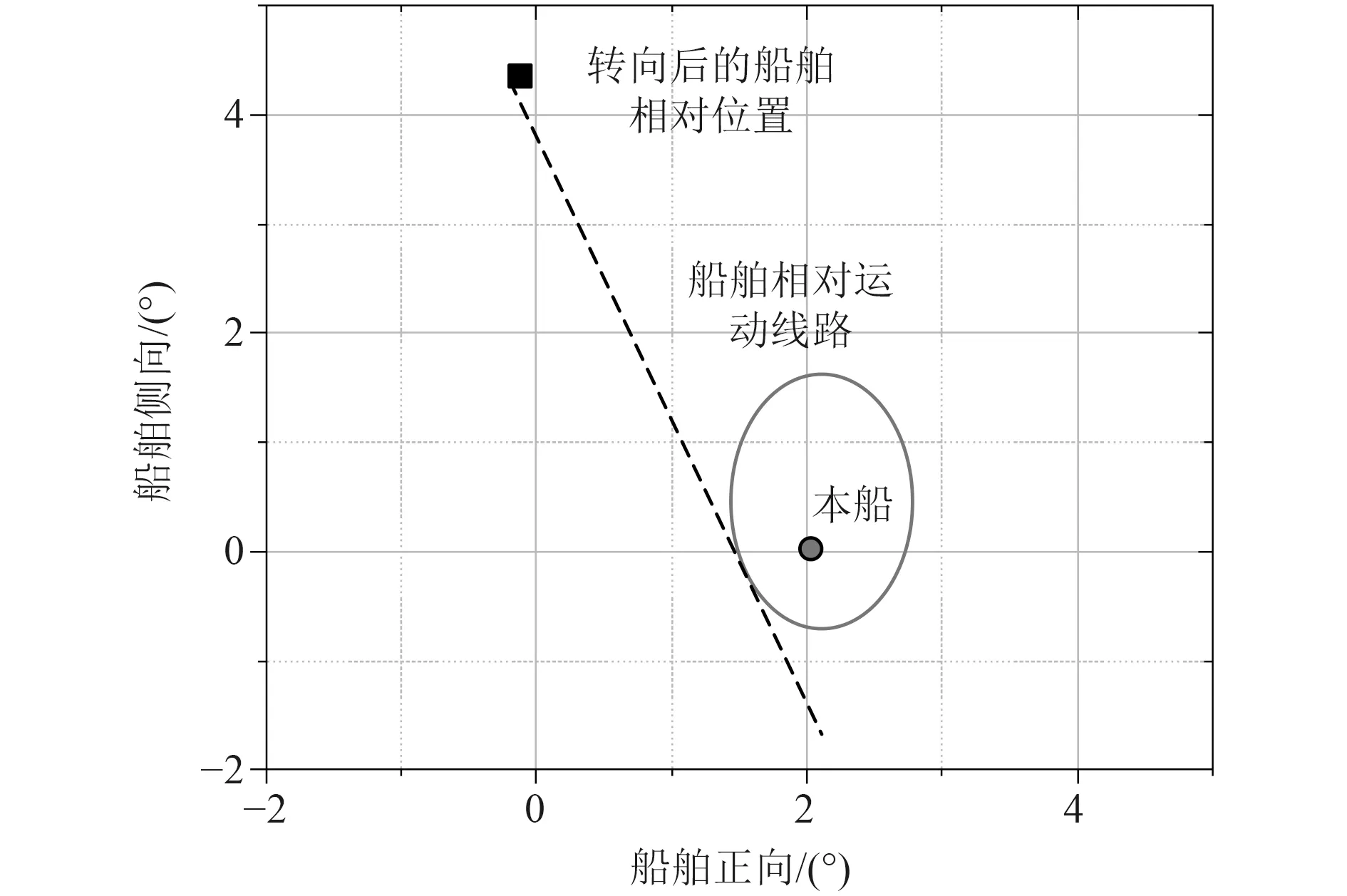
图7 船舶会遇过程的智能化通行决策仿真Fig.7 Intelligent traffic decision simulation of ship meeting process
由以上仿真可以看出,本文提出的自适应神经网络算法可以为船舶会遇时提供通行决策,并能够为船舶规划航线线路,从而降低事故发生的概率。
3 结 语
针对船舶会遇过程的避碰通行策略,本文在AIS系统数据库基础上,结合自适应神经网络算法进行路径寻优,并在Matlab 平台中进行了船舶会遇过程的通行决策仿真。结果表明,本文算法可以有效降低船舶事故发生概率。