基于3D 打印的船载无人机参数化设计
2023-05-04饶婕
饶 婕
(桂林航天工业学院,广西 桂林 541004)
0 引 言
船载无人机可实时采集船舶航行环境的相关信息,为驾驶员提供船舶航行的水域信息,及时发现危险物体,避免发生碰撞事故[1]。船载无人机具备垂直起降与高效巡航特性,可提升无人机飞行效率,延长飞行时间[2]。现代船载无人机的使用特点,导致对其结构重量提出更高的要求。减轻船载无人机结构重量,还可有效降低材料的消耗量[3]。为实现船载无人机的轻量化设计,需研究无人机参数化设计方法。有学者通过网格重构法,建立船载无人机参数化模型,该方法可有效完成船载无人机的参数化设计,设计完成的船载无人机应用性较优[4]。有学者通过分析船载无人机的气动/推进耦合特性,对船载无人机进行参数化设计。该方法设计的船载无人机重量较轻,续航性能较优。但这2 种方法均只实现了船载无人机的轻量化设计,并未考虑船载无人机的力学性能,导致船载无人机的结构柔度较大,降低船载无人机结构间连接的光滑性与全连通性。3D 打印是通过粉与块等形状的材料,逐层堆叠构造物体的一种技术,可完全根据设计者的创意加工获取其需要的目标物体,具备材料利用率高,废料形成量少的优势[5]。为此研究基于3D 打印的船载无人机参数化设计方法,降低船载无人机的结构柔度,提升船载无人机的力学性能。
1 船载无人机参数化设计
1.1 船载无人机的三维建模
采用面向3D 打印技术的SolidWorks 软件提供的API 接口实施二次开发,设计友好的船载无人机参数化设计交互界面,由该界面建立船载无人机的三维模型。船载无人机的三维建模流程如图1 所示。船载无人机的三维建模具体步骤如下:
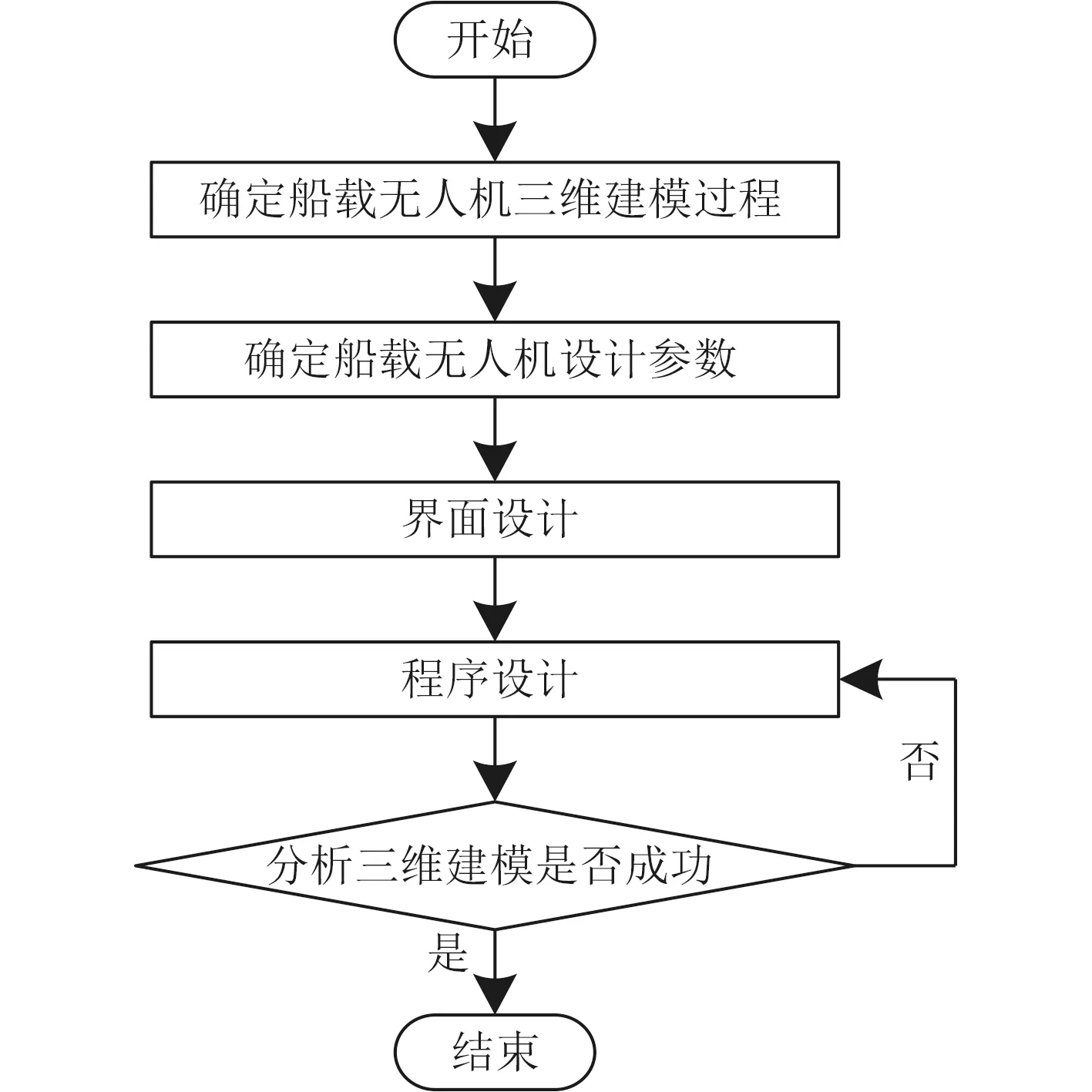
图1 船载无人机的三维建模流程Fig.1 3D modeling process of shipborne UAV
1) 拉伸船载无人机机架与桨叶等零部件的外框实体,切除外框实体得到各零部件间的连接口,并进行修整操作,完成船载无人机三维建模过程的确定。
2) 以船载无人机结构柔度最小为目标,建立船载无人机设计参数确定模型,通过变权重变异鸽群优化算法,求解该模型,得到最小结构柔度对应的船载无人机设计参数。
3) 界面设计,在该界面内输入确定的船载无人机设计参数,自动生成船载无人机各部件的三维模型。
4) 通过设计界面,先确定主体框架,再通过Solid-Works 软件提供的API 接口,启动SolidWorks 软件的建模程序,达到船载无人机自动三维建模的目的。
5) 当船载无人机三维建模成功时,则输出船载无人机的三维模型;反之,返回步骤4,重新建模。
1.2 面向3D 打印的船载无人机设计参数确定
利用面向3D 打印技术的Solidworks 软件,建立船载无人机三维模型过程中,需要先确定船载无人机的设计参数。利用船载无人机的结构柔度,衡量其全局刚度,结构柔度越小,全局刚度越大,船载无人机的力学性能越佳。对3D 打印船载无人机进行轻量化设计,可降低船载无人机重量,节约生产消耗。为此以最小结构柔度为目标,体积、应变与梯度为约束条件,建立船载无人机设计参数确定模型,公式如下:
式中:t确定船载无人机各零部件的尺寸;p确定船载无人机各零部件的厚度;y(u) 为结构柔度;u为位移场。y(u)的计算公式如下:
式中:E为船载无人机设计域内的可变刚度张量;Ω为船载无人机实体材料参考域;f为体积力;g为牵引边界 Γ的牵引力;s为黎曼边界的面力。
为防止船载无人机结构过度突变导致结构曲率较大,出现应力集中问题,在式(1)内添加梯度约束、应变约束与体积约束,要求船载无人机在指定的体积结构内具有最大的刚度,降低船载无人机重量,提升船载无人机的力学性能。为此将式(1)变更为如下的连续形式,即
式中:Ωmax为船载无人机实体材料占据的区域;B为船载无人机体积。
式(3)的体积、梯度、应变约束条件为:
式中:σ为船载无人机应力;ε为应力阈值;v为虚位移;δ(u),δ(v)为u,v的线性应变;B¯为指定的船载无人机积极约束值;‖∇t‖为t的梯度;h为梯度约束值;u¯为位移约束值。
为防止船载无人机三维建模过程中,重新剖分网格,引入Heaviside 函数Z,变更式(3)获取:
式中,λ为船载无人机结构的形状描述函数。
式(4)的约束条件变更为:
式中:η为正则化程度;α为确保船载无人机总刚度的非奇异性。
利用变权重变异鸽群优化算法,求解式(5),获取最小结构柔度的船载无人机设计参数。
步骤1参数初始化。
步骤2鸽群速度与位置更新公式如下:
式中:Qi,Xi为第i个鸽群速度、位置;Xbest为迭代次数;R为地图因子;Xbest为全局最佳位置;γ为随机数。
步骤3更新种群,计算新位置的适应度值,以式(5)的目标函数为适应度值,更新适应度最差鸽群的速度与位置,公式如下:
式中:Qworst(l),Qworst(l) 为最差鸽群速度与位置;f(Xi),f(Xbest)为Xi,Xbest的适应度值。
步骤4计算全局最佳位置Xbest,分析Xbest是否达到最大,若达到最大,则结束算法,输出最小结构柔度对应的船载无人机设计参数;反之,返回步骤3。
1.3 船载无人机的3D 打印
在3D 打印软件内,输入面向3D 打印技术的Solidworks 软件建立的船载无人机三维模型,进行船载无人机的3D 打印,船载无人机3D 打印流程如图2 所示。具体步骤如下:

图2 船载无人机3D 打印流程Fig.2 3D printing process of shipborne UAV
1)3D 打印软件内导入船载无人机三维模型。
2)通过Magics 修复导入的船载无人机三维模型;在导入三维模型过程中,可能会出现较小的缺陷,采用Magics 技术可自动修复该缺陷;
3)分层处理。在打印船载无人机前,需分层处理船载无人机三维模型,获取每层的无人机数据,确定打印方向,以及开始与结束指令;
4)通过3D 打印软件读取每层无人机数据,并实施打印,得到船载无人机,完成船载无人机参数化设计。
2 性能测试与分析
以某KVLCC2 船为实验对象,利用本文方法为该船设计船载无人机,用于实时观测航行环境信息。该船长8 m,宽1.279 9 m,排水体积3.383 5 m3。该船载无人机的设计需求为最大平飞速度在30~35 m/s 之间,最大应力范围在60~70 MPa 之间。
利用本文方法确定该船载无人机的设计参数,最小结构柔度的计算结果如图3 所示。可知,本文方法可有效计算船载无人机的最小结构柔度,当迭代次数达到7 次左右时,便完成收敛,结构柔度降至最低,本文方法计算结构柔度时的收敛速度快。
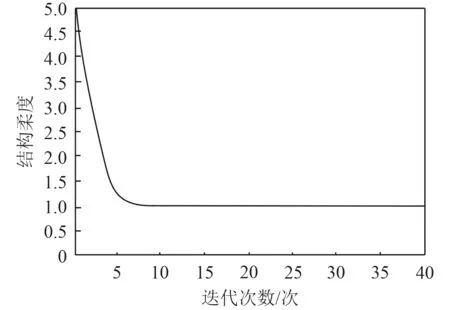
图3 最小结构柔度计算结果Fig.3 Determination results of minimum structure compliance
最小结构柔度对应的船载无人机设计参数如表1所示。可知,本文方法可有效确定最小结构柔度对应的船载无人机设计参数。对比初始值可知,本文方法确定的船载无人机设计参数,均低于初始值,有效节约船载无人机的制造材料,达到船载无人机轻量化设计的目的。
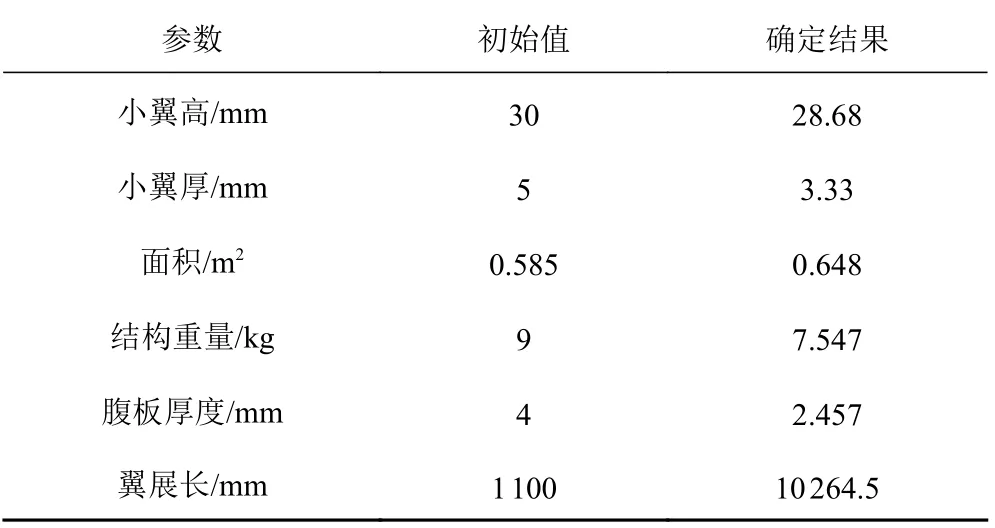
表1 船载无人机设计参数Tab.1 Design parameters of shipborne UAV
利用本文方法根据确定的船载无人机设计参数,建立船载无人机三维模型,如图4 所示。可知,本文方法可根据确定的船载无人机设计参数,完成无人机的三维建模,本文方法建立的三维模型,可清晰呈现船载无人机的细节信息。实践证明,本文方法具备船载无人机三维建模的可行性。
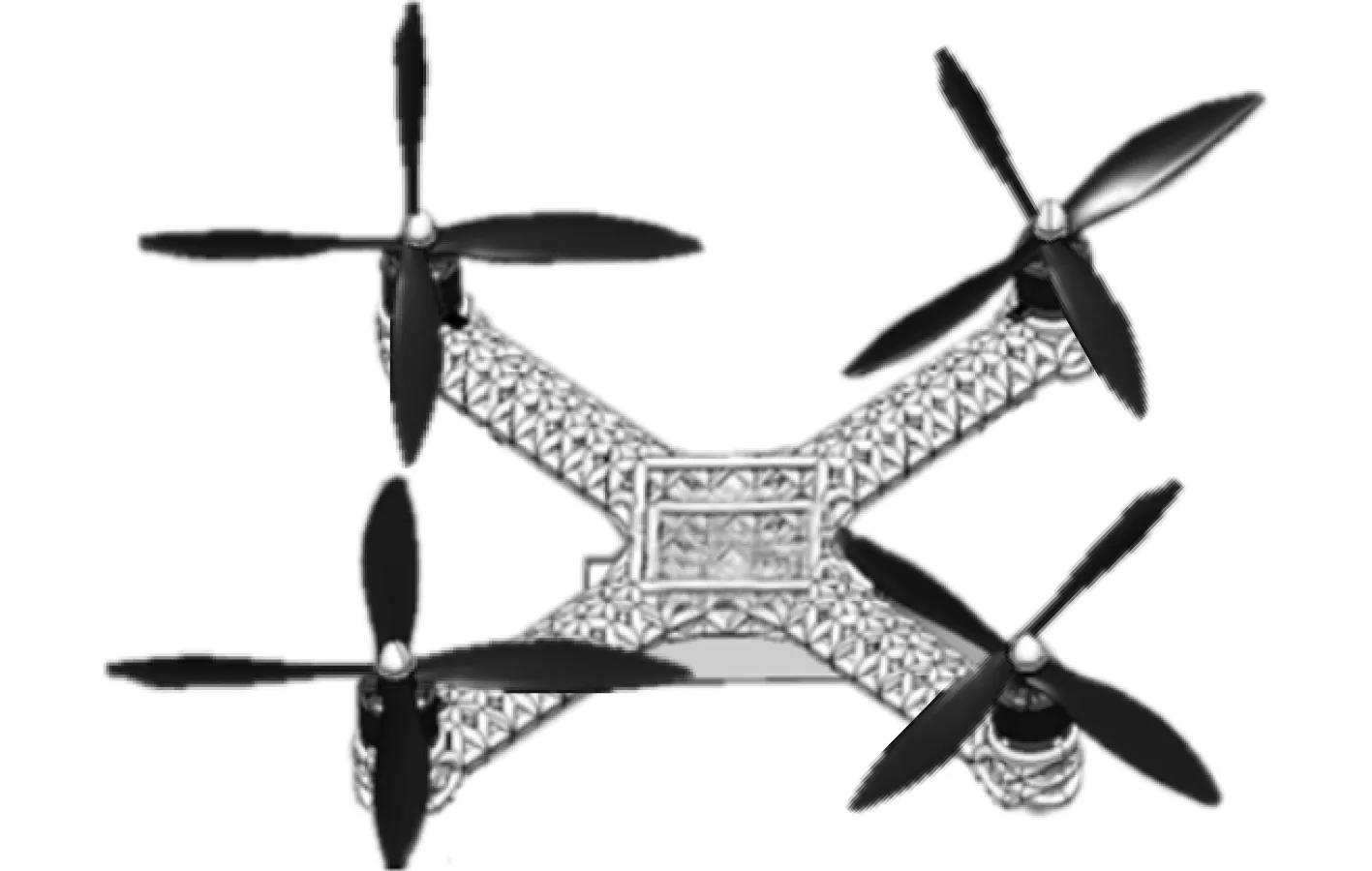
图4 船载无人机三维模型Fig.4 Three-dimensional model of shipborne UAV
利用本文方法对船载无人机进行3D 打印,3D 打印结果如图5 所示。可知,本文方法可有效根据船载无人机的三维模型,得到船载无人机的3D 打印结果。实践证明,本文方法可有效完成船载无人机参数化设计。
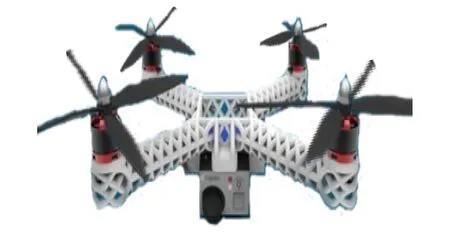
图5 船载无人机3D 打印结果Fig.5 3D printing results of shipborne UAV
在本文方法设计的船载无人机中,随机选择2 个位置,分别在这2 个位置处施加一竖直方向的集中力150 N,分析本文方法设计的船载无人机的最大应力,分析结果如图6 所示。可知,随着时间的延长,船载无人机2 个位置承受的最大应力越大,位置1处的最大应力在67 MPa 左右,位置2 处的最大应力在63 MPa 左右,均在船载无人机最大应力的控制范围内,说明本文方法设计的船载无人机符合强度与刚度等力学性能的需求。

图6 船载无人机的最大应力分析结果Fig.6 Maximum stress analysis results of shipborne UAVs
3 结 语
针对船载无人机制造过程繁琐、材料消耗较多等问题,研究基于3D 打印的船载无人机参数化设计方法,利用3D 打印技术成本低、过程简单、制造效率高等优势,提升船载无人机参数化设计效果。在降低船载无人机结构重量的同时,加强船载无人机的力学性能。
