动态人工势场法的无人船避障路径规划
2023-05-04贾立校
刘 涛,贾立校,曹 翔
(江苏航运职业技术学院 航海技术学院,江苏 南通 226010)
0 引 言
无人船是一种无需遥控、可通过卫星进行定位、依据自身传感器执行任务的全自动水面机器人,其主要用于海洋地形的测绘、水文和水质监测等[1]。路径规划是移动物体起点坐标和终点坐标序列点的连接曲线,无人船在任务执行过程中[2],能够依据任务需求完成航行路径规划。但是海上环境复杂多变[3],也会存在较多的障碍物,因此,在路径规划过程中,需充分考虑对于障碍物的躲避情况。玄世龙等[4]为实现无人船路径规划,获取最佳的航行路线,其通过禁忌搜索算法获取栅格地图中的无人船航行路径,求解其中的最优路径,完成规划。但是该方法在应用过程中,如果存在移动障碍物时,则路径规划效果存在一定偏差。宁君等[5]为实现无人船路径规划,以无人船航行的实际环境为基础,对路径特征进行量化处理后,完成路径规划,但该方法无法获取障碍物和无人船的会遇时间。动态人工势场法属于一种改进的人工势场法,将用于描述障碍物移动信息的趋势参数,引入至斥力函数中,以此保证在动态运行环境中应用效果。因此,本文提出动态人工势场法的无人船避障路径规划方法。
1 无人船避障路径规划
1.1 无人船避障路径规划方法框架
本文在动态人工势场法的基础上对其进行优化,提出相关的无人船避障路径规划方法,整体框架如图1 所示。整体包含全局和局部避障路径规划2 个部分,全局路径规划是以任务执行指令和海上环境为参考,构建海上航行栅格地图,并依据无人船起始位置和目标位置之间的相关信息,通过A*算法进行全局路径规划,获取最优路径规划结果以及无人船的全局的路径节点;将获取的全局路径节点作为局部路径的开始节点,结合无人船航行过程中采集的环境实时信息,分析环境的变化情况,如果环境中存在障碍物,则通过动态人工势场法进行障碍物规避,实现无人船避障路径规划,并对规划结果进行改进。

图1 无人船避障路径规划方法框架Fig.1 Obstacle avoidance path planning method framework for unmanned ships
1.2 无人船全局路径规划
本文在进行无人船全局路径规划时采用A*算法完成,其在进行路径规划过程中,能够通过给定的启发函数减少搜索节点数量,以此可显著提升路径搜索效率。该算法的评价函数F(k)计算公式为:
式中:g(k) 为路径起点位置到当前位置的实际消耗;h(k)为启发函数。
该算法在进行无人船全局规划时的步骤如下:
1) 定义无人船的初始位置和目标位置;
2) 通过A*算法按照一定方向进行目标位置搜索,获取和当前位置之间F(k)最小的位置;
3) 将上述获取的位置作为下一个起点,继续获取和该位置之间F(k)最小的位置。以此循环获取目标位置,获取全局的路径节点和路径规划结果。
1.3 无人船局部路径规划实现方法
通过A*算法获取最优路径规划结果以及无人船的全局路径节点后,进行局部避障路径规划。采用动态人工势场法有效避免基础人工势场法在障碍物较多环境中发生的最小值陷阱现象,提升避障路径规划效果。结合动态人工势场法概念可知:在运动环境内,无人船运动目标位置和环境中存在的障碍物均会对无人船造成影响,会形成斥力和引力2 种势场,利用引力和斥力2 种函数分析无人船在该环境中的势场。进行避障路径规划时,相对位置、相对速度分别用 κ,μ表示,前者对应无人船初始位置和目标位置之间,后者对应初始速度和目标点之间,在此基础上完成无人船引力势场函数f(x)的建立,即
式中:ε 和 φ均为常量,前者为正,后者为负,均对应引力势场中。
依据f(x)计算无人船在当前运动环境中受到目标位置的引力值U(X,V),其计算公式为:
式中:F*(X)为无人船的引力方向;F*(V)为 μ方向的引力向量。
在进行无人船避障路径规划时,无人船对于目标位置的追踪由F*(X)决定,无人船趋向目标位置速度则由F*(V)决定。依据无人船和障碍物之间的相对位置,建立无人船斥力势场函数f(y),其表达公式为:
式中:c,h,a均为斥力势能,以此分别对应距离因素对于无人船、相对速度对于无人船、相对加速度对于无人船;γ为障碍物和无人船之间的欧式距离;φ,ω均为比例增益系数,前者为正,后者为负;ξ 为整体增益指数。
依据f(y)计算无人船在当下运动环境中受到来自障碍物的斥力值U(X,V,A),其表达式为:
式中:c0,h0,a0均为斥力,依次分别对应 γ对无人船、相对速度对无人船、相对加速度对无人船;σ,τ,δ均为梯度,依次位于障碍物对于无人船形成的斥力场中、相对速度对无人船形成的斥力场中、相对加速度对无人船形成的斥力场中。
在动态环境中,斥力和引力2 种势场结合对无人船形成的总势场用U*表示,其计算公式为:
依据全局势场函数计算无人船当前所在位置的全局势能用U*(X)表示,其计算公式为:
式中:t,ei分别为无人船在单位时间内达到的目标位置和该位置的邻域位置集。
如果U*(X)>0,则定义无人船在单位时间内可以达到的目标位置即为下一时刻的目标位置,同时将该位置划分至避障路径点集内,其对应的状态即为目标状态;如果U*(X)≤ 0,定义无人船在单位时间内可以达到的目标位置领域位置为下一时刻的目标位置,同时将该位置划分至避障路径点集内,其对应的状态即为目标状态。依据上述公式即可完成无人船在运动环境中所经过的全部故障点确定,并输出避障路径规划结果。
1.4 无人船避障路径规划优化
动态人工势场法虽然能够有效避免发生最小值陷阱现象,但无人船航行环境为未知情况下,适应能力会受到一定影响,导致对避障路径规划效果较差;当障碍物移动速度较快时存在信息缺失情况,无法精准掌握障碍物情况。因此,为保证无人船避障路径规划效果,采用长短记忆循环神经网络和强化学习算法相结合的方式对动态人工势场法进行改进,提升应用效果。以无人船在当前时刻的信息输出结果为基础,结合无人船之前的信息变化情况,对障碍物运动情况进行预测后获取障碍物预测状态空间S0,在此基础上对动态人工势场法对于障碍物检测半径R进行调整,完成对运动障碍物的跟踪,保证该方法在障碍物运动速度较快时,依旧能够可靠获取障碍物信息,保证无人船避障路径规划效果。其详细步骤如下:
1) 依据动态人工势场法获取的避障路径规划结果,确定该方法的检测半径R;
2) 依据该半径结果获取整体可检测的圆形结果T和障碍物斥力场之间存在的接触点数量n,并确定n的分布情况,将该情况输入长短记忆循环神经网络中;
3) 获取S0结果,以S0的空间位置和无人船状态为依据,对R进行调整。
在该步骤中,将获取的S0输入至强化学习算法中,并依据无人机状态空间S设置回报函数 ψ,以此保证无人船可为通过最佳的回报完成动态障碍物的躲避,无人船和障碍物间的距离计算公式为:
式中:r为障碍物斥力场半径;da1a2为2 个圆交点之间的距离。
在此基础上设定 ψ结果:
式中:υ为无人船航行速度,在该速度下航行用υ×Δt表示;dsafe为安全距离。
如果ψ=-1,表示该规划路径不会发生碰撞;反之ψ=1,表示该规划路径会发生碰撞。
2 实验结果分析
以LB-110 型号无人船作为实验对象,采用本文方法对其进行避障路径规划,获取相关规划结果,衡量本文方法的应用效果。无人船主要是用于采样监测,其重量为20 kg,采样流量为2 个2.5 L/min,其带宽信号为100 kHz。参数设定:无人船初始位置坐标为(115°06' 02E,22°26' 02N),目标点位置坐标为(115°09'05E,22°33' 04N);引力场和斥力场2 种系数取值分别设定为0.000 1 和1,步长为0.1 m。
无人船全局路径的最优规划结果如图2 所示。可知,本文方法应用后,能够依据无人船初始位置和目标点位置获取全局最优路径规划结果,并且可依据可规划结果生成无人船的路径规划栅格地图结果。
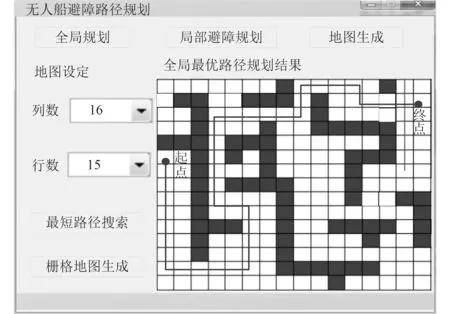
图2 无人机全局路径的最优规划结果Fig.2 Optimal planning results of UAV global path
获取本文方法在存在运动障碍物的复杂环境中,对于无人船的避障路径规划结果,如图3 所示。可知,本文方法应用后,无人船在运动过程中,即使在遇见运动障碍物的环境中,也能够有效完成障碍物躲避,避免发生碰撞现象,并完成运动路径规划。

图3 无人船的局部避障路径规划效果Fig.3 Local obstacle avoidance path planning effect of unmanned ship
采用碰撞危险度作为评价指标,其包含空间和时间碰撞危险度,2 个指标的计算结果如表1 所示。可知,在障碍物移动速度不断增加的情况下,本文方法应用后,空间碰撞危险度和时间碰撞危险度2 个指标的结果均满足应用需求。其中,空间碰撞危险度值均大于4.26 m,其最大值为5.59 m,时间碰撞危险度的值均在15 s 以上,其最高值达到20.2 s。因此,本文方法应用效果良好,能够极大程度避免无人船在路径规划过程中发生和障碍物碰撞情况。

表1 无人船碰撞危险度测试结果Tab.1 Test results of unmanned ship collision risk
3 结 语
无人船在任务执行过程中,为保证其在有效避免发生碰撞情况下,完成路径规划,保证无人船安全完成任务,本文提出动态人工势场法的无人船避障路径规划方法。对该方法进行相关测试结果表明:本文方法具有较好的无人船避障路径规划能力,可在有效躲避移动障碍物的情况下,完成路径规划。
