基于AIS数据的船舶会遇挖掘与分析
2022-09-04赵吟秋索永峰
赵吟秋,索永峰,鲜 波
(1.集美大学航海学院,福建 厦门361021;2.集美大学航海技术研究所,福建 厦门 361021)
0 引言
船舶自动识别系统(automatic identification system,AIS)提供了丰富的船舶航行数据,基于AIS船舶轨迹数据进行通航水域风险评价、船舶自身行为特征分析、自动避碰以及船舶会遇等方面的研究是当前的热点[1]。潘家财等[2]根据厦门湾内水域特点以两船会遇距离作为会遇判定条件,统计船舶会遇的空间分布以及会遇船长分布等,分析了厦门湾船舶会遇状况。任亚磊等[3]基于构建的动态船舶领域模型,对会遇类型、会遇船舶特征等进行统计,进而评估相关水域的宏观碰撞危险度,该方法对开阔水域船舶目标航行数据较少的情况下难以确定每条船舶的动态领域,因此在开阔水域中该方法的适用性还有待验证。马杰等[4]采用时空关系对数据进行约束,提取特定时间段内船舶的位置和航向特征,形成会遇特征序列,利用支持向量机(SVM)对会遇特征进行分类辨识,但该方法并未列举判定会遇态势的筛选条件,也不适用于对大量数据进行船舶的会遇挖掘。甄荣等[5]提出运用墨卡托算法计算船舶之间的距离,并通过DBSCAN算法识别船舶会遇。冮龙晖等[6]根据船舶AIS动态数据,结合插值方法计算船舶间相对运动参数,提取船舶会遇信息。Du等[7]通过检测船舶会遇,进而对船舶可操纵余量,避让有效性等指标对会遇船舶的碰撞风险等级进行划分,检测近距离会遇的船舶。Zhang等[8]通过对会遇的船舶进行风险排序,考虑船舶领域和船舶尺寸计算碰撞风险,检测近距离会遇的船舶,该方法可以有效区分具有不同碰撞风险的会遇船舶,但缺少对会遇过程的量化分析。Kim等[9]运用分布式随机搜索算法,结合AIS数据实现会遇的多船各自判断会遇态势。Chen等[10]运用改进的时间离散非线性速度障碍(TD-NLVO)算法识别特定区域AIS数据中的多船会遇局面。
综上所述,根据海量AIS数据快速高效挖掘船舶会遇信息,定量多维度分析船舶的会遇过程方面的研究有待提高。为了能够快速有效地挖掘船舶会遇局面,识别潜在的碰撞风险点,监测处于会遇过程中的船舶航行数据,定量分析船舶会遇过程,本文改善传统DBSCAN算法,分析船舶会遇时空演化特性,有效识别会遇船舶,并在此基础上挖掘多船会遇局面,划分船舶不同会遇类型,分析船舶的会遇避让方式,建立会遇船舶数据库。
1 AIS数据预处理
在现实条件下,由于各种原因导致AIS数据存在缺失、重复等数据异常现象,给AIS数据处理以及分析带来一定的难度。为提高数据的准确性和可信度,首先对AIS数据中船舶位置、航速、航向等不符合常理的异常数据进行删除。由于在船速较低的情况下船舶的操纵性能较差,难以实施有效的避让行为,分析会遇过程没有实际意义,因此,删除船速值小于4 kn的AIS数据。当AIS数据中数据条目的时间间隔较大时,容易导致后续插值补全的误差很大,影响再现船舶真实航行情景,因此,删除数据条目时间间隔大于30 min的数据。
为了对海量的AIS数据进行有效分析,将AIS数据条目大于300条的船舶航行数据提取出来,对船舶数据进行后续统计分析,处理后的部分AIS数据如表1所示。
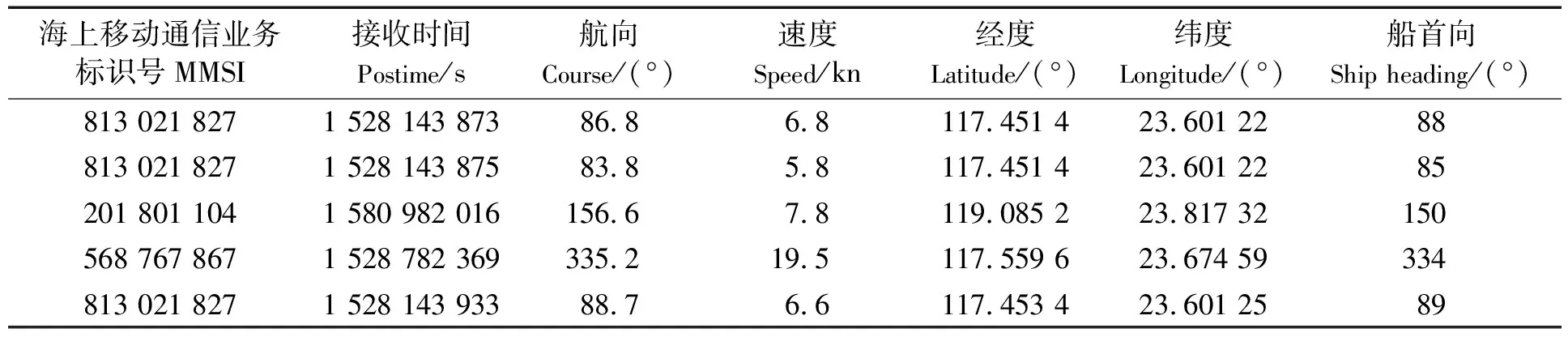
表1 AIS数据处理项
2 会遇挖掘算法模型与特征参数计算
2.1 船舶潜在会遇的定义
人们将海上航行船舶相遇而必须采取行动的情况称为“会遇”。会遇不包括无需采取避让行为的船舶相遇的情况。在海上交通研究中,会遇是指与碰撞事故密切相关且在一定程度上表征海上交通危险的一种特殊的船舶相遇情况[8]。本文将潜在会遇定义为:当两船位于某一给定距离以内的一种实际情况。参考文献[12]有关船舶最小安全会遇距离的模糊确定研究,本文采用0.5 n mile为潜在会遇判定的阈值条件。
2.2 DBSCAN算法原理
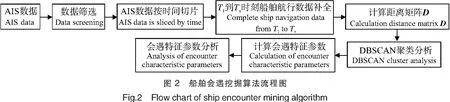
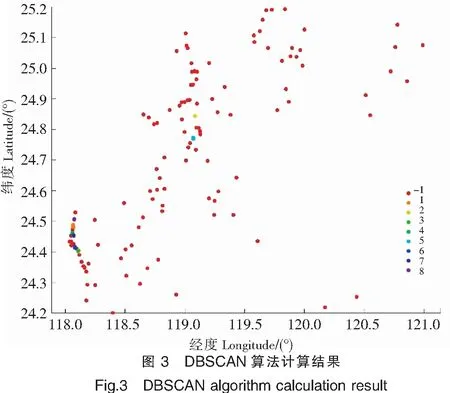
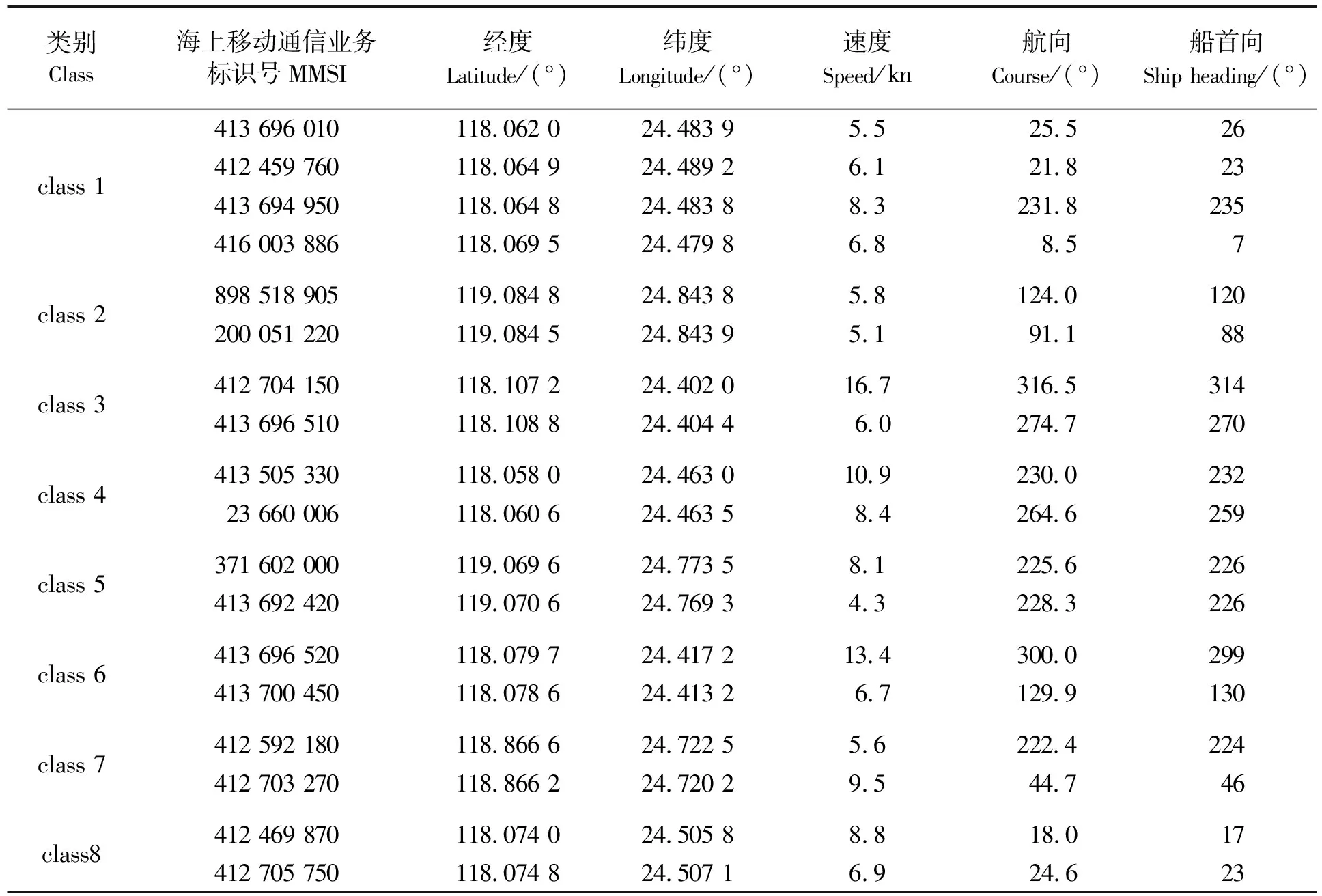
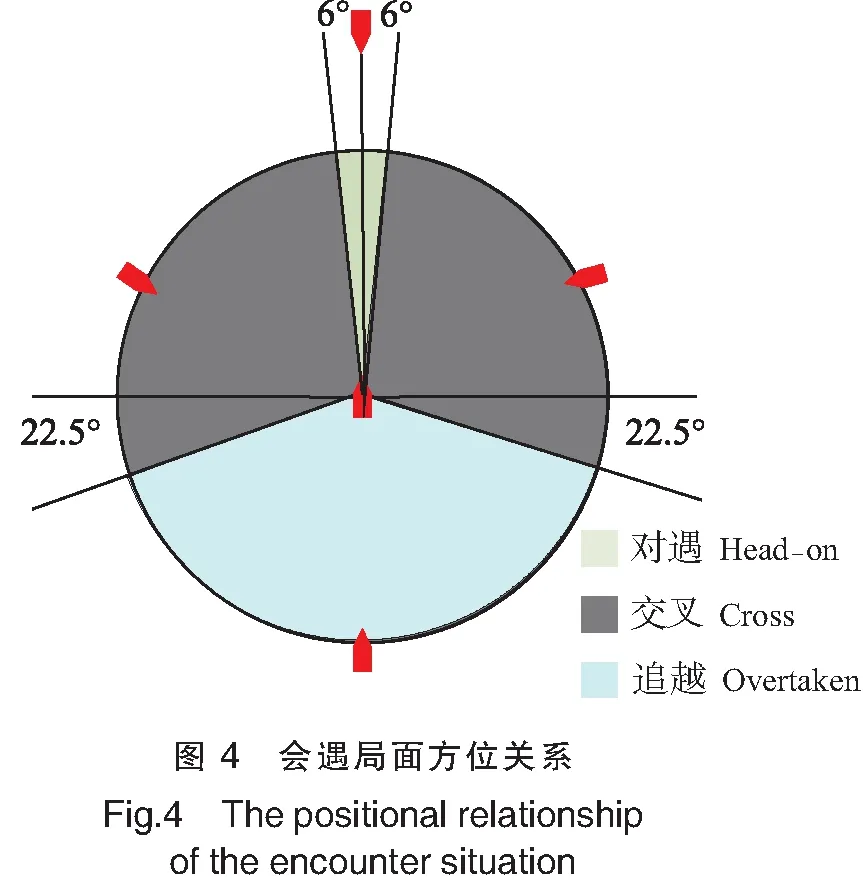
DBSCAN聚类算法应用广泛[1],其基本原理如图1所示。在研究区域内,设定两个参数阈值MinPoints和领域半径E,以数据对象S为圆心,划定一个半径为E的圆形区域,在此区域内检测数据样本数量Q,若Q≥MinPoints则S为核心对象,其余点称为边界对象,处于核心对象E领域中的样本点为核心对象的直接密度可达样本点;如若Q 以时间戳为关键字提取船舶航行数据,建立时空约束下不同船舶的轨迹状态时间序列traj={(p1,t1),(p2,t2),(p3,t3),…,(pn,tn)},p={mmsi,postime,lon,lat,speed,course,heading}表示标志码为mmsi的船舶在某一时刻的航行状态数据,为了避免应用DBSCAN算法挖掘船舶会遇时,出现船舶A与船舶B之间的相对距离值dAB(A,B=1,2,…,n)重复计算的情况,构建船舶相对距离矩阵D,计算不同船舶之间的距离[13]。该矩阵与全矩阵计算相比较,将算法的运算量减小了50%。 (1) 给定两船经纬度坐标A(Lon1,Lat1),B(Lon2,Lat2),采用恒向线方位距离计算公式计算两船方位角C和距离d[11]。具体计算公式如下: C=arctan(ΔLon/Δq) (2) (3) 式中:经度差ΔLon=Lon2-Lon1;Δq为AB间纬度渐长率差值;SLati为点到赤道的子午线弧长;r1为Lat1纬度处的等纬圈半径。其中,SLati的计算式为: (4) 式中:a为地球椭圆体长半轴长;e为偏心率。 A、B间纬度渐长率差值Δq计算公式如下: (5) Lat1纬度处的等纬圈半径r1为: (6) 本文在两船会遇起始点计算两船航向差与相对方位关系,并将此作为依据划分船舶的会遇类型,两船航向差ΔH以及目标船的相对方位计算如下。 (7) 式中:AO为目标船的相对方位;HO,HT分别为本船和目标船船首向;ΔH为两船的航向交叉的角度。 首先对原始AIS数据进行预处理,按照位置时间作为关键字进行升序排序,以1 min为时间间隔提取时间段内船舶航行数据,将该数据按照船舶识别号分别进行插值补全到同一时刻T1,T2,…Tn,且每分钟内每条船只保留一条AIS数据。遍历每一个时间片,计算相对距离矩阵,调用DBSCAN算法。DBSCAN 聚类算法设计的关键参数为MinPoints≥2,E=0.5,以相对距离矩阵D为算法输入数据,输出潜在会遇船舶状态信息,并将其存储在对应的数据库中,运用CPA算法,验证数据库中的船舶会遇情况,最后结合船舶会遇分类划分船舶会遇类型,进行会遇过程分析。算法流程如2图所示。 以2020年6月台湾海峡的AIS数据为研究对象,原始AIS数据为1000万条,经过数据预处理后剩余400万条。通过设置滑动时间窗口以提取研究水域内会遇场景的特征序列数据。根据算法流程和参数计算法公式,可以得出某一时刻T的潜在会遇船舶信息,如图3所示。其中:红色点(-1)表示没有达到会遇筛选条件的船舶,即为噪声点;图3中其余颜色(标识分别为1,2,…,8)各自代表一组潜在会遇船舶,通过标记可以得到潜在会遇船舶的标识码和相关航行状态信息。 将图3部分类别数据导出,并去除噪声点,得到表2。将表2中数据进行相关参数计算,可得两船的相对距离和方位以及航向差信息。 表2 潜在会遇船舶状态数据 当会遇船舶相互位于各自正前方以相反或接近相反的方向相互逼近时,通常是指船首向交叉在6°范围内构成对遇局面;当船首向交叉大于6°且小于112.5°时,构成交叉会遇;若满足后船于前船正横大于22.5°范围内,以较大速度赶超前船的情况,则构成追越局面。其方位关系如图4所示。 根据图4方位关系,结合会遇船舶相对方位关系和会遇船舶航向差可以实现不同会遇局面的识别。 根据DBSCAN算法得出的潜在会遇船舶,结合图4的会遇局面划分关系,进行船舶会遇局面的识别与分析。本文选择追越、交叉和对遇3种典型局面进行展示,结果如图5所示。 为避免碰撞发生,图5b和图5c都有典型的避让行为发生。图5b中A船舶(蓝色,下同)保持直航,B船舶(红色,下同)向右改向,完成避让后回到原航向。图5c中B船舶为完成避让采取了向右改向,待避让完成后回到原航向继续行驶。这也表示船舶严格遵守了《规则》中的向右改向避让他船的要求。 为保障船舶在海上的航行安全,提高船舶危险会遇的识别率,本文基于AIS数据,通过改进DBSCAN算法的相对距离矩阵,减小了DBSCAN算法的运算量。同时在数据不失真的前提下,合理处理AIS数据,减小了CPA算法的运算量,并且处理过程中保证了数据时空的一致性,减小了会遇的误判与漏判。本文以台湾海峡部分数据为基础,结合会遇局面方位关系,验证了算法的有效性。通过定量描述船舶会遇过程,可加深对会遇态势的整体感知,再现船舶会遇过程,为后续基于AIS的船舶避碰行为研究提供参考,也为自动避碰决策优化提供一种可行的验证方法。目前算法仅对两船会遇进行了研究,后续还需对多船会遇进行深入研究。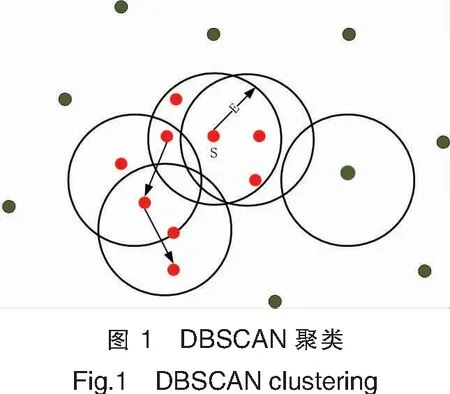
2.3 船舶会遇特征参数计算
2.4 改进的船舶会遇挖掘算法流程设计
3 算法实验
3.1 DBSCAN聚类实验结果
3.2 会遇类型划分
3.3 会遇挖掘结果与分析
4 结论