国外深潜救生艇发展趋势
2023-05-04胡中惠何再明苏晓云
胡中惠,王 瑶,马 岭,何再明,叶 聪,苏晓云
(1.中国船舶科学研究中心,江苏 无锡 214082;2.深海技术科学太湖实验室,江苏 无锡 214082)
0 引 言
在现代潜艇发展过程中,深潜救生艇是援潜救生的核心装备,是确保潜艇具有战斗力的保障,对潜艇的安全保障更具现实意义,历来受到各潜艇国家的高度重视[1-3]。深潜救生艇是一种可与沉没失事潜艇对接,援救出被困艇员的载人潜水器,是执行潜艇救生的保障装备。国际上自1979 年以来的若干次重大演习证明,采用深潜救生艇实施救援是可靠、有效的方式。
1 深潜救生艇总体概况
目前,国外拥有深潜救生艇的国家主要集中在环太平洋地区、大西洋地区和地中海地区。其中,环太平洋地区的国家主要包括美国、俄罗斯、日本、韩国、越南、新加坡、印度和澳大利亚,环大西洋地区的国家主要包括瑞典、英国、法国和挪威(英国、法国和挪威共同开发了NATO 深潜救生艇),地中海地区的国家主要为意大利。
由各国深潜救生艇的服役时间线(见图1)可以看出,国外深潜救生艇的发展可以大致分为2 个阶段。其中,第1 个发展阶段为冷战时期至20 世纪末,第2 个发展阶段为21 世纪初至今。

图1 深潜救生艇服役时间线Fig.1 Time line of deep diving lifeboat service
在第1 个发展阶段中,20 世纪60 年代至1986 年,苏联的1837 型、1837K 型、1855 型深潜救生艇,美国的Mystic 号和Avalaon 号深潜救生艇,瑞典的URF 型深潜救生艇,英国的LR5 型深潜救生艇和日本的JMSDF 型深潜救生艇服役;20 世纪90 年代,俄罗斯的18 270 型深潜救生艇,意大利的SRV300 型深潜救生艇,韩国的LR5K 型深潜救生艇和澳大利亚的REMORA型深潜救生艇服役。
在第2 个发展阶段中,2008 年、2010 年以及2016 年至今是深潜救生艇服役的高峰时期,拥有深潜救生艇的国家增加至13 个。其中,2008 年、2010 年,美国的潜艇救生潜水再加压系统SRDRS 和北大西洋公约组织的北约潜艇救援系统服役,澳大利亚租借了以改造后的LR5 型深潜救生艇为核心的潜艇救援系统、韩国引进了1 艘DSAR-5 型深潜救生艇,新加坡引进了1 艘DSAR-6 型深潜救生艇。2016 年至今,俄罗斯的18 271 型深潜救生艇服役、日本的第3 艘JMSDF型深潜救生艇(代替第1 艘)服役,印度引进了2 艘DSAR650L 型深潜救生艇,越南引进了1 艘LR11 型深潜救生艇。
各个国家的深潜救生艇的救援能力如表1 所示。

表1 救援能力概况Tab.1 General situation of rescue capability
2 深潜救生艇发展趋势
2.1 救援能力维持现有水平
目前世界各国现役深潜救生艇的主要救援能力分布如图2 所示。可以看出,最大作业深度方面,意大利的SRV300 型深潜救生艇的最大作业深度最小,为300 m,日本JMSDF 型深潜救生艇的作业深度最大,为1000 m,其他国家现役深潜救生艇的最大作业深度主要集中在500~700 m 的范围内;单次救援人数方面,瑞典URF型深潜救生艇单次可救援人数最多,为35 人,其他国家现役深潜救生艇的单次救援人数主要集中在12~17 人的范围内;最大对接角度方面,各国现役深潜救生艇的最大对接角度集中在45°~60°的范围内,对于对接角度的调节,LR 系列、DSAR 系列等深潜救生艇采用对接裙,通过调整艇体姿态实现对接角度的调节,对接裙结构简单,但在大角度对接时,因艇体倾角过大,对接操作难度很大,同时,当被救艇员进入艇内并在其中移动时,易发生对接裙与对接平台滑移的情况,不利于救援安全性。而美国SRDRS 系统、俄罗斯18 271 型、澳大利亚Remora 型等深潜救生艇采用对接转裙,通过调整转裙的姿态角和方位角实现对接角度的调节,大幅降低了对接操作的难度,但对接转裙尺寸相对较大,突出艇体型线较多,对救生艇的水动力性能会带来较大的影响;在带压救援能力方面,各国现役深潜救生艇的带压救援能力主要集中在0.6 MPa左右。
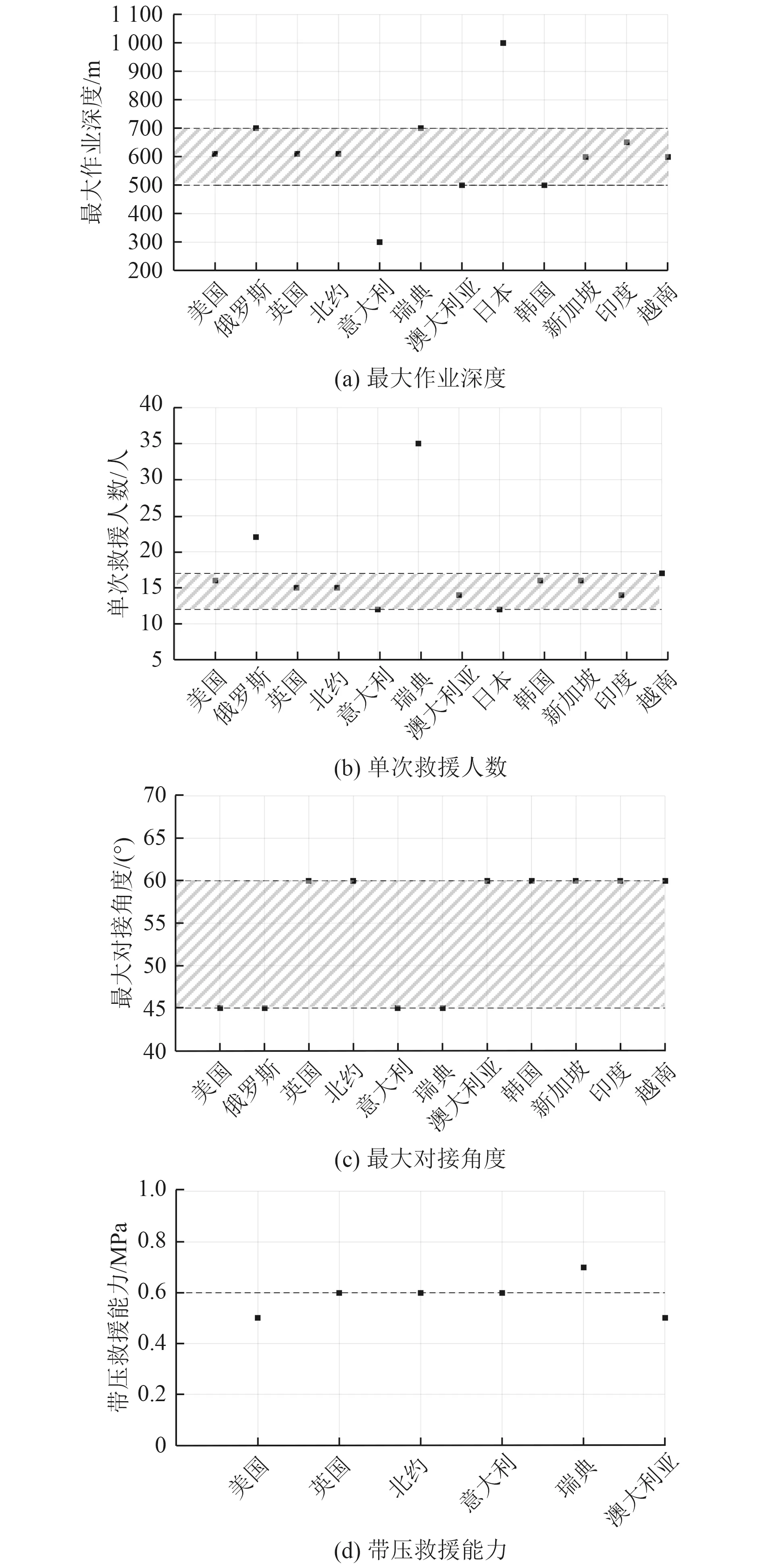
图2 各国深潜救生艇救援能力指标分布Fig.2 Index distribution of rescue capability of deep submarine rescue vehicles in different countries
考虑到目前各国大部分潜艇的工作深度、艇员规模以及人员的承压能力,在未来的一段时间内,目前服役的深潜救生艇救援能力已能较好地满足援潜救生的需求,救援能力基本维持现有水平,但性能上会随着能源技术、自动控制技术以及传感器技术等技术的发展有局部的提升。
2.2 救援范围向极地拓展
极地地区在地缘战略、自然资源、航运及科研方面的价值日益凸显,成为国际争夺的战略要地,特别是北极地区,对于北极国家美国、俄罗斯、加拿大、挪威、丹麦、冰岛、瑞典和芬兰都具有重要的战略意义与价值[19-20]。各个国家在极地地区的军事活动日益频繁,特别是近年来,美俄两国潜艇在极地地区的活动频率持续升高。深潜救生艇作为援潜救生的核心装备,其救援范围将进一步向极地拓展,以满足潜艇在极地地区活动的保障需求。但由于极地环境存在低温、高纬度、大范围冰盖和复杂水声环境等特点,使得目前的深潜救生艇在极地开展救援作业具有高风险性和局限性。针对极地环境的特点,文献[21]总结了发展极地载人潜水器所涉及的关键技术,而深潜救生艇作为载人潜水器的一种,由于其作业的特殊性,还需要重点解决极地环境下的救援作业模式、高频次跨温区生存技术、水下导引技术、对接可靠性技术、基于高频次下潜的补给技术等关键技术。
2.3 装备体系化、模块化
由深潜救生艇现状可以看出,援潜救生装备进一步整合,从初始设计阶段就贯彻了体系化、模块化的思想,深潜救生艇不再作为单独设备进行使用,在实施潜艇救援过程中,深潜救生艇、遥控水下潜水器(ROV)、单人常压潜水装具(ADS)等多种装备分工明确、紧密协作,根据实际情况的不同救援需求,采用不同的救援方式和设备,从而最大限度地发挥整体救援系统的功效。同时,通过救援系统体系化的设计,深潜救生艇的搭载平台实现通用化,摆脱了对专业援潜救生船的依赖,深潜救生艇的转运更加灵活快速,可通过海运、陆运和空运等多种运输方式迅速部署到事发海域,实施救援,进一步提高了救援响应能力和响应效率。
同时,除美国采用有缆式的深潜救生艇外,其余国家装备的深潜救生艇均为无缆式。随着锂离子电池、水声通信、水下定位等技术的快速发展,相比于以美国SRDRS 系统为代表的有缆式深潜救生艇,无缆式深潜救生艇受能源、通信等方面的限制越来越小,而且,救援深度越大,有缆式深潜救生艇受铠装缆的影响越大,严重制约了救生艇的机动性,不利于与失事艇的对接,相较而言,无缆式深潜救生艇在水下的机动能力和对接能力更强。因此,近些年韩国、新加波、印度和越南等国装备的深潜救生艇均为无缆式。随着未来潜艇的作业深度、活动海域的范围越来越大,以及锂离子电池、水声通信、水下定位等技术的进一步发展,无缆式深潜救生艇的优势将进一步提升,能够快速转运、以无缆式深潜救生艇为核心的体系化、模块化潜艇救援系统将是今后发展的主要方向。
2.4 水下导引组合化
深潜救生艇快速抵达失事潜艇救生平台并建立救援通道是救援的关键之一。LR 系列、DSAR 系列等代表世界先进水平的深潜救生艇通常采用单一的远距离声学导引的方式引导驾驶人员操纵深潜救生艇抵近失事潜艇救生平台,当近距离对接时,则是驾驶人员通过对接裙内、外摄像机观察对接裙与对接平台的相对位置,操艇完成对接裙与救生平台的对接并建立救援通道。这种方式仅实现了远距离导引,并对驾驶人员的操艇技术和经验依赖度很高,救援时间存在较大的不确定性,影响救援效率。同时,虽然声学导引是目前水下最有效且常用的信息传播载体,但由于存在信号延迟、噪声干扰等问题导致近距离导引精度差,难以引导深潜救生艇完成与失事潜艇的对接,仅适合于远距离导引。因此,有必要发展远程与近程相结合的组合式导引技术,以提升导引精度,提高救援效率。目前,美国、俄罗斯、日本、西班牙等多国开展了基于“声学+光学”、“声学+视觉”等多种组合式导引技术研究,采用“远程声学导引+近程声学、光学、视觉混合导引”的方式实现了水下航行器与海底坞站平台之间的导引[22]。
2.5 对接控制自主化
目前,深潜救生艇与失事潜艇的救生平台对接均通过驾驶人员根据导引数据操纵调整艇体姿态、位置等实现。虽然大多数深潜救生艇具备一定的航行自动控制能力,比如自动定向、自动定深、自动定高等功能,但在对接过程中,环境干扰因素多,尤其是当2 个物体相互靠近时,流场变化十分复杂,同时,失事潜艇的水下姿态具有较大的不确定性,导致深潜救生艇的对接裙裙口平面与对接平台的对接面之间的平面角度是强耦合的,人工对接操作难度很大,影响对接成功率。因此,提升救援对接控制的自主化水平是提升对接成功率的主要方向之一。目前,美国、瑞典、挪威等国已开展了基于水下无人航行器的水下自主对接控制技术研究,随着环境感知、人工智能、数据融合等技术的发展,深潜救生艇与失事潜艇的对接控制将逐步向自主化方向发展,最终实现自动对接、无人自主救援等能力。
3 结 语
近年来,我国周边的韩国、新加坡、印度、越南等国先后装备了最新的深潜救生艇,美国、澳大利亚等北约成员国也相继对本国的深潜救生艇进行了升级改进,本文对目前国外深潜救生艇的现状进行梳理,分析和归纳了当前国外深潜救生艇的救援能力并展望了未来的发展趋势。通过分析得出如下结论:
1)在未来的一段时间内,目前深潜救生艇的救援能力已能较好地满足援潜救生的需求,救援能力基本维持现有水平,但性能上会随着能源技术、自动控制技术以及传感器技术的发展有局部的提升;
2)随着各个国家在极地地区的军事活动日益频繁,特别是近年来,美俄两国潜艇在极地地区的活动频率持续升高,深潜救生艇的救援范围将进一步向极地拓展,以满足潜艇在极地地区活动的保障需求;
3)随着未来潜艇的作业深度、活动海域的范围越来越大,以及锂离子电池、水声通信、水下定位等技术的进一步发展,无缆式深潜救生艇的优势将进一步提升,能够快速转运、以无缆式深潜救生艇为核心的体系化、模块化的潜艇救援系统将是今后发展的主要方向。同时,有必要发展组合式导引技术和自主化救援对接技术,进一步提升水下失事潜艇救援的成功率和效率。
