基于ICS-INC的局部阴影下光伏最大功率点追踪研究
2023-04-29朱娟娟刘新宇闫群民郭阳
朱娟娟 刘新宇 闫群民 郭阳


摘要:传统最大功率点追踪技术(Maximum Power Point Tracking,MPPT)存在收敛速度慢、精度差、易陷入局部最优等缺点.针对上述问题,提出一种基于改进布谷鸟算法(Improved Cuckoo Search,ICS)和电导增量法(Incremental Conductancemethod,INC)的联合MPPT控制方式.首先对布谷鸟算法(Cuckoo Search,CS)中莱维步长和毁巢率进行了自适应变化增加了迭代收敛速度和全局寻优能力,其次通过判断鸟巢间最大位置差ξ切换INC防止其陷入局部极小值,最后分别进行静态对比和动态光照仿真实验.静态对比仿真结果表明此控制方式在追踪速度和精度上更有优越性;动态仿真测试结果证明该方法在复杂环境下具有鲁棒性.
关键词:太阳能发电; 最大功率点追踪; ICS算法; INC算法
中图分类号:TM615文献标志码: A
Research on photovoltaic maximum power point tracking under
local shadow based on ICS-INC
ZHU Juan-juan, LIU Xin-yu, YAN Qun-min, GUO Yang(College of Electrical Engineering, Shaanxi University of Technology, Hanzhong 723001, China)
Abstract:The traditional maximum power point tracking technology has the disadvantages of slow convergence speed,poor accuracy and easy to fall into local optimum.Aiming at the above problems,a combined MPPT control method based on improved cuckoo algorithm and conductance increment method is proposed.Firstly,the iterative convergence speed and global optimization ability are increased by the adaptive change of Levy step size and nesting rate in CS algorithm.Secondly,the maximum position difference between nests is judged to switch INC to prevent it from falling into local minimum.Finally,static comparison and dynamic illumination simulation experiments are carried out.The static comparison simulation results show that this control method has more advantages in tracking speed and accuracy.The dynamic simulation test results show that this method is robust in complex environment.
Key words:solar power generation; maximum power point tracking; ICS algorithm; INC algorithm
0引言
太陽能因其能源丰富、无污染、易获取等特性,成为了当今主要能源之一[1].光伏系统的输出功率会随光照强度及温度等外界条件变化[2],为了使输出功率时刻保持在最大值,最大功率点追踪(Maximum Power Point Tracking,MPPT)技术应运而生.通过控制电压和电流值,使光伏电池能够始终工作在一个最优值点,以此提高光伏发电的效率[3].
当光伏电池处于同一个光照强度和温度下时,光伏阵列的输出P-V曲线呈现单峰值现象[4].传统追踪方法例如:扰动观察法[5]、电导增量法[6]等都可以在单峰情况下有效的追踪到最大功率点(Maximum Power Point,MPP)处.而在实际生活中,存在阴云、树枝阴影、遮挡物等情况,使得光伏阵列局部地区光照强度发生改变,导致P-V曲线输出存在多个峰值点[7].传统的几种方法判断较为依赖斜率,使得在多峰值点容易陷入局部最优解,无法追踪到MPP处.针对此类问题,诸多学者对传统的方法进行了优化改进,在此基础上提出了群体智能优化算法加以控制.文献[8]提出一种改进粒子群(Particle Swarm Optimization,PSO)算法,在传统的PSO算法基础上引入了状态因子δ,将惯性权重和学习因子由固定值变为了线性变化,这种方式使得PSO算法跳出局部最优的能力大大增加,但是牺牲了其收敛速度.文献[9]提出一种PSO和爬山法协同控制的方法,对比于传统单一算法,跟踪效果有所提高,但仍难以在确保精度的同时保证速度的提升.文献[10]提出灰狼优化算法控制,提高了跟踪速度,但是追踪最大功率过程中振荡幅度过大,损失了较多能量,减少了功率转换效率.文献[11]将滑模控制应用在MPPT系统中,有效提高了系统的抗扰动能力,但在最大功率点处有较大振荡幅度.上述所提各种方法在解决多峰值最大功率点追踪问题中,都对跳出局部最优解问题进行了一定的优化,但很难在满足追踪速度的同时,兼顾精度和适用性.
对此本文提出一种基于改进布谷鸟算法(Improved Cuckoo Search,ICS)和电导增量法(Incremental Conductancemethod,INC)的局部阴影下光伏最大功率点追踪控制方法.通过分析标准布谷鸟算法(Cuckoo Search,CS)中飞行步长控制量和毁巢率两个参数的变化对算法的影响规律,提出了一种非线性改进方式,提高了算法的全局搜索能力和收敛速度.为近一步加强ICS算法的局部收敛能力,防止其陷入局部极小值,在算法后期通过鸟巢位置差改换INC进行最大功率点追踪.此方式在增强ICS算法跳出局部能力和收敛速度的同时减小了迭代后期振荡大的缺点,得到一种更加贴合局部阴影MPPT寻优控制方法.通过Simulink搭建光伏仿真系统,在静止初始条件下进行实验,结果证明了该方法在追踪速度和精度都较PSO算法和标准CS算法更有优越性,并通过动态光照下的仿真验证了该方法在复杂环境下的适用性.
1光伏电池特性
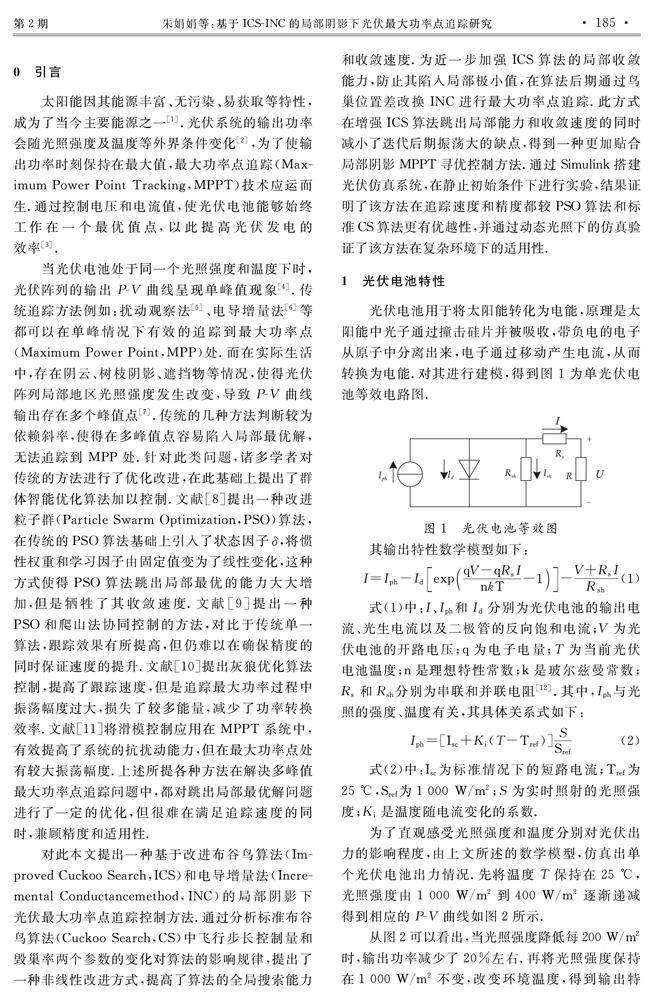
光伏电池用于将太阳能转化为电能,原理是太阳能中光子通过撞击硅片并被吸收,带负电的电子从原子中分离出来,电子通过移动产生电流,从而转换为电能.对其进行建模,得到图1为单光伏电池等效电路图.
其输出特性数学模型如下:
为了直观感受光照强度和温度分别对光伏出力的影响程度,由上文所述的数学模型,仿真出单个光伏电池出力情况.先将温度T保持在25 ℃,光照强度由1 000 W/m2到400 W/m2逐渐递减得到相应的P-V曲线如图2所示.
从图2可以看出,当光照强度降低每200 W/m2时,输出功率减少了20%左右.再将光照强度保持在1 000 W/m2不变,改变环境温度,得到输出特性P-V曲线如图3所示.
由图3可以看出,温度上升了5 ℃,其最大功率仅下降了2%,可见温度的改变对输出功率的影响较小.对于局部阴影条件下的光伏阵列,光照强度导致的环境温差较小,因此在局部阴影条件下的输出特性一般忽略了温度的影响.
2局部阴影下的光伏阵列输出特性
光伏组件有串联和并联两种方式,其产生的局部影响情况如图4所示.
图4(a)为并联光伏组件组成的光伏阵列.并联情况下当PV2和PV3受到不同程度遮挡后,正常工作的组件其短路电流和开路电压都将大于其余两个阴影光伏组件.选取25 ℃下,PV1、PV2、PV3光照强度分别为[1 000、800、600]W/m2,仿真当并联情况下发生局部阴影时,其P-V输出特性变化情况,并与三个组件均处于1 000 W/m2对比,得到结果如图5所示.由图5可得,在此情况下整个光伏电池输出峰值点有所下降,但仍然呈现为单峰.
图4(b)为串联光伏组件组成的光伏阵列.当出现此阴影现象,PV1的短路电流和开路电压都大于阴影中工作的组件.设定PV1、PV2、PV3分别为[1 000、800、600]W/m2进行仿真.得出串联光伏阵列发生遮阴下的输出特性并与正常工作下进行了对比.得到结果如图6所示.
由仿真结果图6可知,当串联阵列出现局部阴影,使得光伏电池出现不同光照强度后,其P-V图则会呈现多峰现象,且不同遮阴情况下,会出现至多串联光伏组件数个峰值.这是由于当串联的光伏组件存在阴影时,被遮挡的组件所能产生的最大电流有可能小于系统工作电流,这时阴影组件将不再工作,致使P-V呈现多峰状态.
3ICS-INC算法在MPPT中的应用
3.1布谷鸟算法
3.2改进布谷鸟算法
3.3电导增量法
通过其斜率的变化来判断工作点是否处于最大值,若工作在最大功率点右侧时,此时变化值为负;若在左侧,则变化值为正.通过此原理便可适当的调整光伏的出力点,最终稳定在MPP附近.由于INC是根据斜率判断的特性,其相較于其他算法具有良好的稳定性.但是当出现多峰值现象,其P-V图像出现多个斜率为零点,这样INC可能处于其中一个斜率零值点而产生最大值的误判,跳不出局部最优解,导致功率的损失.
3.4基于改进布谷鸟算法和电导增量法MPPT
ICS-INC算法集中两种算法的优势,在精确寻优的同时保证了快速性.整个控制方式的基本原理为首先检测整个光伏发电的电压和电流,以其乘积功率作为ICS算法鸟巢的适应度,通过莱维飞行和毁巢率不断更新鸟巢适应度,输出最优鸟巢所对应占空比,当转换为INC算法后,以ICS算法迭代后的功率为起始量,通过斜率正负值判断迭代方向,输出占空比,通过占空比调节输出对应功率.
其基本流程为:
(1)初始化参数并且生成N个鸟巢,鸟巢的位置代表电压值.
(2)计算鸟巢的质量,其所体现的是相适应的功率,记录最佳鸟巢位置和质量gbest.
(3)由式(6)设定Pa和α,通过式(3)(4)进行Levy飞行更新并改善鸟巢的位置.
(4)评价更新后的鸟窝位置和质量.
(5)根据Pa舍弃一定量鸟巢,同时由式(5)随机产生新巢.
(6)更新鸟巢位置和质量,记录更新后的最优位置和质量.
(7)判断是否达到最优解附近,达到后根据式(7)启动INC算法,否则返回步骤(3).
(8)到达最优解附近,利用INC控制进行小步长局部寻优.
(9)判断是否达到终止条件,如未达成则回到步骤(8),否则输出最大功率点.
(10)当改变的光照强度满足式(8)即输出功率变化量ΔPb>0.1时,视为光照强度大幅改变,需要重启MPPT.
4仿真实验
为验证所提方法相较于其他有优越性,在Simulink中进行仿真实验.为了能够更好贴合实际太阳能发电,光伏阵列采用10串4并的方式,共计40个光伏单元,单光伏单元模型的数据如表1所示.
通过改变模块的光照强度和温度两个输入参数,即可模拟出光伏电池出力情况,输出实时电压和电流值.ICS-INC算法通过电压和电流值控制占空比,以PWM连接标准的Boost升压电路,从而实现光伏阵列功率的实时控制[19,2].其结构框图如图9所示.
4.1静态光照仿真
由于并联不改变峰值个数只改变峰值大小,因此并联每组采用与第一组相同初始条件,要改变串联光照强度即会改变峰值个数.考虑模拟局部阴影下的仿真分析,设置环境一为环境温度T=25 ℃,串联10组的光照强度分别为前4组1 000 W/m2,中间4组800 W/m2,后面2组为400 W/m2,此光照强度最大功率点为5 761 W.表2光照强度场景图.
采用PSO算法、CS法以及本文提出ICS-INC算法三种算法进行MPPT仿真实验.对比三种算法的追踪速度、追踪精度以及成功率.得到仿真如图10所示.
将上文所提条件设定为仿真参数并保持不变,对三种算法均进行了静态光照强度MPPT仿真实验.由仿真结果图10可知,静态光照下三种控制方式均可以追踪到MPP.由于算法具有随机性,为了仿真结果更加具有准确性,在三种环境光照强度下将以上三种控制方法分别进行20次实验,记录其相关数据如表3所示.
其中,PSO算法到0.48 s左右追踪到MPP处,追踪最大功率点为5 750 W.CS算法在0.2 s左右追踪到MPP区间附近,但存在较大振荡一直到0.46 s才稳定追踪到最大功率点5 753 W.ICS-INC算法在0.16 s左右追踪到最大功率点,最大功率为5 761 W,相比较于PSO和CS,ICS-INC算法明显提高了追踪时间;解决了CS算法局部振荡较大的问题,将振荡幅度大量减小,快速收敛到MPP处.
4.2动态光照仿真
上文仿真实验体现了ICS-INC算法在静态光照条件下最大功率追踪的优势.而现实情况下光照强度是不断改變的,为了验证ICS-INC算法在复杂光照下的适用性和光照改变的鲁棒性,设置一组实验验证在改变光照强度后,ICS-INC算法能否依然追踪到最大功率点处.初始光照强度设为理想环境下即环境二光照,在t=1 s和t=2 s时改变光照强度,t=1 s光照强度变为环境一;t=2 s时变为环境三.仿真结果如图11所示.
由图11可知,在光照突变时,ICS-INC算法依然可以有效的追踪到MPP.并且具有较快速度.这表示本文所提的ICS-INC算法有效的改善了MPPT问题,不管在静态光照条件下还是复杂的动态光照条件中,都可以快速的追踪到最大功率点.减小了光伏发电的损耗,提高了效率,并且具有普适性.
5结论
局部阴影会改变光伏发电系统的输出特性,并且出现多峰值功率点,影响了MPPT算法的追踪速度和精度,因此本文提出了基于ICS-INC的局部阴影下光伏最大功率点追踪方法.通过在MATLAB/Simulink中搭建10串4并光伏阵列模型,进行了稳定光照下的光伏追踪仿真实验,仿真结果表明ICS-INC控制方式在追踪速度上较PSO提升了67%,较CS算法振荡时间减少了65%,输出最大功率更加接近MPP,证明了该方法在追踪速度和精度都具有一定优越性;并且动态光照下的光伏追踪仿真实验结果表明,该方法在光照强度改变的情况下依旧能稳定的追踪到最大功率点,证明了该方法具有普适性.
参考文献
[1] 张明锐,蒋利明,孙华,等.基于免疫细菌觅食算法的大容量光伏阵列GMPPT算法[J].中国电机工程学报,2016,36(1):104-111.[2] 李畸勇,张伟斌,赵新哲,等.改进鲸鱼算法优化支持向量回归的光伏最大功率点跟踪[J].电工技术学报,2021,36(9):1 771-1 781.
[3] 花赟昊,朱武,郭启明.光伏发电系统MPPT算法研究综述[J].电源技术,2020,44(12):1 855-1 858.
[4] 郭昆丽,闫东,付建哲.基于改进扰动观察法的光伏系统MPPT研究[J].电源技术,2021,45(1):56-59.
[5] 王伟,戴朝华,陈维荣,等.改进功率预测变步长扰动法在光伏MPPT中的研究[J].太阳能学报,2022,43(2):217-225.
[6] 魏立明,吴扬昀.基于改进INC的光伏MPPT策略研究[J].电源技术,2021,45(6):791-796.
[7] 韩鹏,李银红,何璇,等.结合量子粒子群算法的光伏多峰最大功率点跟踪改进方法[J].电力系统自动化,2016,40(23):101-108.
[8] 姜萍,栾艳军,张伟,等.局部遮阴下基于改进PSO的多峰值MPPT研究[J].太阳能学报,2021,42(8):140-145.
[9] 马昊,张庆超.基于粒子群优化算法和变步长扰动观察法的局部阴影情况下MPPT控制[J].电源学报,2016,14(3):94-101.
[10] Guo Ke,Cui Lichuang,Mao Mingxuan,et al.An improved gray wolf optimizer MPPT algorithm for PV system with BFBIC converter under partial shading[J].IEEE Access,2020,8:103 476-103 490.
[11] 邵文权,王猛,吴朝俊,等.基于改进滑模控制的光伏系统MPPT控制策略[J].太阳能学报,2021,42(10):87-93.
[12] 钟庆,石泉,王钢,等.基于扰动式MPPT控制的光伏并网系统间谐波分析模型[J].中国电机工程学报,2018,38(22):6 533-6 542.
[13] 郑洪清,周永权.一种自适应步长布谷鸟搜索算法[J].计算机工程与应用,2013,49(10):68-71.
[14] 赵帅旗,肖辉,刘忠兵,等.基于CSA-IP&O的局部遮阴下光伏最大功率点追踪[J].电力系统保护与控制,2020,48(5):26-32.
[15] 周东宝,陈渊睿.基于改进型变步长电导增量法的最大功率点跟踪策略[J].电网技术,2015,39(6):1 491-1 498.
[16] 董密,杨建,彭可,等.光伏系统的零均值电导增量最大功率点跟踪控制[J].中国电机工程学报,2010,30(21):48-53.
[17] 张永革,石季英,张文,等.复杂遮阴条件下光伏系统MPPT控制改进PSO算法仿真研究[J].中国电机工程学报,2014,34(S1):39-46.
[18] 商立群,李帆.基于自适应布谷鸟搜索和扰动观察法的光伏最大功率点跟踪[J].电力系统保护与控制,2022,50(8):99-107.
[19] 周天沛,孙伟.不规则阴影影响下光伏阵列最大功率点跟踪方法[J].电力系统自动化,2015,39(10):42-49.
【责任编辑:陈佳】