一种基于VPX 架构的光纤惯组系统集成一体化设计方法
2023-04-20张燕萍师祥利尚俊云褚万利
张燕萍, 师祥利, 尚俊云, 张 波, 褚万利
(中国航天科技集团有限公司第十六研究所, 西安 710100)
0 引言
众所周知, 惯性技术因其具有不受外界干扰、完全利用自身感知能力、 可以全天候自主感知载体六个自由度运动信息的优点, 是目前最为重要的导航技术手段之一。 捷联式惯性导航系统具备体积小、 质量小、 抗冲击振动能力强、 可靠性高、工作时间和储存寿命长、 成本低廉、 反应时间短、动态范围宽等一系列特点, 捷联式惯性测量组合(Inertial Measurement Unit, IMU)是控制系统中用于导航制导的核心部件, 其精度和可靠性决定了运载火箭的制导性能, 结构尺寸制约了武器系统/运载火箭的大小[1-3]。 近年来, 因其具备宽动态测量范围、 高灵敏度、 抗冲击、 抗振动的显著优势,光纤惯组得到了长足发展。 随着工业技术的发展,光纤陀螺仪成本不断降低, 性能持续提高, 光纤惯组将在众多领域得到广泛应用。
武器系统/运载火箭控制系统电气设备由IMU、弹/箭载计算机、 卫星导航系统、 电动伺服舵机等单机组成。 传统的控制系统电气设备采用联邦式架构(分离式设计), 各单机之间采用外部总线进行信息交互, 各部组件之间如电源、 机箱等相互独立, 其连接方式为电缆连接, 该设计架构简单易行, 但并未综合考虑单机性能、 系统性能和成本间的关系, 且数字化程度不高, 单机间接口不规范, 从而导致系统体积大、 成本高, 通用性差、维修性低。
随着武器系统/运载火箭功能需求的增加, 对控制系统提出了小型化、 低成本、 通用化、 标准化、 高集成一体化的需求[4]。 通过实现重要单机模块化设计、 控制系统集成一体化设计, 以降低武器系统/运载火箭的结构尺寸和研发周期以及提高武器系统/运载火箭的有效载荷。 国际上最具代表性的有美国的 “航天发射系统” (SLS) 火箭、SpaceX 公司“猎鹰” (Falcon) 系列火箭和欧洲的“阿丽亚娜6 号” (Ariane 6)系列火箭, 均开展了控制系统集成一体化研究, 将模块化组合化的综合电子架构设计思路作为降低发射成本、 提高有效载荷的重要手段[5]。 Ariane 6 运载火箭[6-7]采用综合电子架构, 实现了控制、 测量功能的集成。 未来,控制系统将采用高集成的通用模块, 在保持原有高可靠性、 高可测试性的基础上, 向着更加轻质、智能的集成一体化方向发展[4]。 目前, 国内运载火箭电气系统最新研究表明, 采用系统集成和一体化设计方法, 可以降低运载火箭成本, 提升有效载荷, 充分发挥每个单机的功能, 达到设备多功能集成的目的[8]。 在国内外运载火箭控制系统发展的基础上, 长征系列运载火箭实现了控制系统综合电子架构的单机模块化板卡[9]。 文献[4]提出了一种箱体化的GNC(Guidance Navigation and Control)控制组合系统一体化设计方法, 该设计将惯性测量、 卫星定位、 伺服功率驱动等模块与基本CPU模块、 供电模块、 接口模块按照综合电子架构进行了集成, 提升了GNC 系统的智能化水平。
目前, 以惯组为中心, 尤其是以光纤惯组为中心, 基于多个VPX 功能模块[10]四周腔体均布,集成控制、 测量、 安全等功能的惯组一体化尚未见报道。 因此, 为了满足运载火箭的轻量化、 集成化发展需求, 本文提出了一种基于光纤惯组的系统集成一体化(以下简称惯组一体化技术)设计方法, 并从系统设计实现与试验验证方面开展了研究。 一方面, 该方法可以减小系统的体积和质量,降低系统设计的成本; 另一方面, 将控制系统各个功能模块通过VPX 总线形式和IMU 系统集成,增强了系统的兼容性、 可靠性, 便于系统的拆装和维护, 对控制系统集成一体化设计提供了新思路和新方法。
1 惯组一体化设计
1.1 总体设计
惯组一体化设计的总体思路是将控制系统中的光纤惯组作为中心模块, 对其它各部件进行功能分解及重组, 合并相同功能模块, 形成标准化模块, 各模块之间采用背板进行信号交联。 惯组一体化采用多核单处理器的计算机体系结构, 完成组合导航和制导控制任务解算; 采用多腔对称分布一体化设计架构, 光纤惯组位于其正中位置,保证惯性仪表具有良好的动态、 力学环境特性,其余功能模块集成到同一个机箱内, 分布在光纤惯组周围的四个腔内, 具有良好的热学、 电磁兼容性能。 惯组一体化设计可大幅减少系统内部冗余器件、 部件间交联接插件等硬件资源, 有利于模块间进行互换, 便于安装使用, 达到降低成本、减小体积、 提高系统可靠性的目的; 中心模块光纤惯组可以根据精度需求进行调配, 其余各功能模块可以根据控制系统需求进行增减, 形成的标准化功能模块均可以在其它单机产品上复用。 惯组一体化的总体设计原理如图1 所示。

图1 惯组一体化系统设计原理Fig.1 Design principle of integrated IMU system
1.2 硬件设计
根据上述惯组一体化设计方法, 尽可能缩小控制系统产品体积, 减少各组成部分直接“有线(电缆)” 连接。 以某型号运载火箭应用需求为例,将光纤惯组、 异构计算机模块、 接口模块、 时序控制模块、 射频调制模块、 电源模块、 遥测采编模块等通过VPX 背板全部集成。 在系统设计时,采用VPX 总线设计, 实现了控制系统各设备间信息的互连互通和供配电能力, 同时也实现了产品的通用化设计和互换性设计能力, 通过背板实现了光纤惯组模块、 异构计算机等模块的集成互连。惯组一体化硬件设计平面布局如图2 所示。

图2 惯组一体化系统设计平面布局Fig.2 Plane layout diagram of integrated IMU system
惯组一体化工作原理为: 光纤惯组用于感测整个箭体三个轴向的角速度和视速度, 以数字脉冲形式发送给异构计算机模块进行导航和姿态解算; 异构计算机模块可接收地面测发控指令并完成相应控制, 同时可实现伺服驱动控制; 电源模块将弹上电池或地面电源转换为一体化内部各模块使用的一次或二次电源; 时序控制模块负责整箭的转配电以及时序控制; 射频调制模块接收解算卫星定位信号并发送至异构计算机模块, 由异构计算机模块完成组合导航解算; 上述功能模块均通过VPX 背板连接, 完成供配电及信号收发功能。
1.3 软件设计
将传统箭载软件按组合导航、 飞行控制等功能分解、 合并, 按照数据流划分为不同计算任务,合并各单机核心处理器, 设计了基于“通信核+主控核+ 实时解算核” 多核单处理器架构方式,采用嵌入式实时操作系统对任务按优先级管理,实施抢占式任务调度机制, 确保在单处理器架构下高效、 协调地完成组合导航、 制导控制及伺服控制等功能。 该嵌入式架构实现飞行时序控制、在线迭代导航与制导实时解算, 确保了实时高可靠的运行, 同时减少了各模块处理器的数量, 提高了集成化水平。
软件一体化设计可大幅减少软件代码, 减小部件间信息传输延迟, 提升系统性能。 惯组一体化系统中, 各功能模块作为一体化软件的不同任务, 各功能模块间信息采用软件变量传递, 在目前高速处理器情况下几乎无时间延迟。 而传统分立系统各功能模块间普遍采用数据总线传递信息,时间延迟较大。
1.4 集成设计
惯组一体化内部各模块电气接口打破了传统通信方式, 采用了符合VITA 标准的VPX 和DP2A 3U 型高集成连接方案, 实现了多路射频接口、 时序信号、 高速差分、 1553B 总线、 高速以太网、0.1A ~30A 电流模拟信号的互联和传输, 接口统一简单, 标准化程度大幅提高, 有利于整合箭上电缆网布局, 实现了通用化、 小型化。
2 惯组一体化关键设计及实现
限于篇幅原因, 主要对惯组一体化、 光纤惯组及背板进行阐述。
2.1 惯组一体化实现
惯组一体化技术实现结构外形图如图3 所示,各功能模块连接示意图如图4 所示。 这种惯组一体化技术实现了控制系统各功能模块的高度集成,具有结构紧凑、 设计实现灵活等特点, 各模块采用VPX 通用总线, 方便更换和维修, 提高了产品集成度、 可靠性和测试性。 与传统单机产品相比,可以有效降低控制系统体积、 质量和设计成本,具有较好的应用前景。

图3 惯组一体化技术实现结构示意图Fig.3 Structure diagram of integrated IMU technology

图4 惯组一体化产品各组成模块连接示意图Fig.4 Diagram of functional modules connection for integrated IMU products
2.2 光纤惯组设计实现
光纤惯组主要由光纤陀螺仪、 石英挠性加速度计、 计算机电路、 I/F 转换电路和台体组成。 作为独立功能模块, 其通过总线形式与背板进行电气连接。 光纤惯组位于惯组一体化的中间位置,根据控制系统不同精度应用需求, 选择不同精度惯性仪表实现惯性测量、 导航和控制功能。 以中精度级别光纤惯组为例, 其结构示意图如图5 所示, 具备定位基准和定位插拔功能, 易于安装和固定。

图5 光纤惯组外形示意图Fig.5 Diagram of optical fiber IMU
2.3 背板设计实现
背板位于一体化机箱内部, 用于电源和信号的对外转接、 提供各功能模块电源通路及各功能模块间信号的互连。
背板具有八个功能槽位, 功能槽位在背板的布置如图6 所示。 光纤惯组位于背板上方, 通过矩形电连接器与背板连接, 通过两个射频连接器实现与外部设备的电气接口。

图6 背板插槽示意图Fig.6 Diagram of backplane slot
根据VITA46 标准, 在背板设置定位导销, 相邻导向销安装位置距离及边界的导向销安装位置距离可以进行调整设计。 导向销与安装在该位置的功能模块对应的导向座角度应保持一致, 不同槽位对应的定位导销角度按照0°、 45°、 90°、 270°和315°五种角度进行控制。
背板采用八槽互联全网状拓朴结构, 各模块均包含交换器件, 模块之间可以直接进行点对点通信, 背板与各功能模块通过符合VPX 标准的连接器连接, 与后I/O 板采用四个相同的CRM 板间连接器, 各模块之间采用高速串行以太网连接。
3 惯组一体化试验验证
根据运载火箭的使用要求, 惯组一体化产品需要对其功能性能、 电气接口、 可靠性、 环境适应性等方面进行试验验证: 功能性能方面, 对产品的各项参数进行测试, 结果满足指标要求; 电气接口方面, 通过和运载火箭匹配试验, 验证接口协调正确; 可靠性验证主要针对惯组一体化产品半实物仿真试验进行说明; 环境适应性主要包括力学环境、 热学环境和电磁兼容。 其中, 力学环境包含了环境应力筛选、 例行试验和鉴定试验,主要通过对惯组一体化减振特性、 角振动特性、冲击响应谱、 六自由度振动进行试验验证分析;热学环境则重点对系统集成一体化所带来的热问题进行分析和试验验证; 电磁兼容根据系统电磁环境条件进行分析和试验验证。
3.1 惯组一体化热学设计试验验证
惯组一体化设计以光纤惯组为核心, 其位于箱体中心, 周围四个腔多个功能模块匀布, 加之光纤惯组本身对温度变化比较敏感, 因此光纤惯组应用环境比较恶劣。 同时, 运载火箭实际地面发射准备有常温2h 热待机的应用工况, 并要求惯组一体化内部光纤惯组内台体温度不能大于45℃。基于此, 惯组一体化设计采用了复合热控技术,并对原理样机在常温2h 热待机条件下的温度特性进行了试验验证。 试验过程中, 将惯组一体化置于温箱内, 在温箱温度达到25℃并保温2h 后给惯组一体化通电, 对光纤惯组和机箱上的温度测试点每5ms 进行一次采样, 通电时间为2h, 试验结果如图7 所示。 由图7 可知, 光纤惯组内台体在常温环境全载工作2h 后温度达到了38.88℃, 小于45℃, 能够满足惯组一体化使用要求。
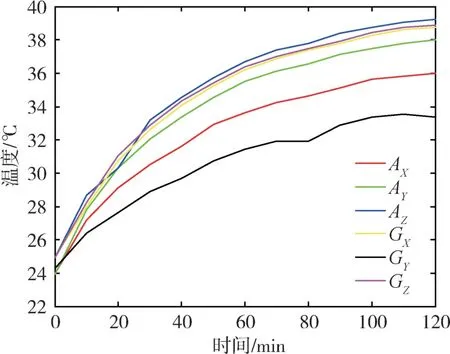
图7 惯组一体化内台体温度变化曲线Fig.7 Temperature variation curves of the inner-platform in the integrated IMU products
为了进一步验证惯组一体化产品热学特性,在常温下对光纤惯组(惯组一体化原理样机中的光纤惯组内台体) 进行了2h 通电试验验证, 结果如图8 所示。 由图8 可知, 光纤惯组温度变化曲线与图7 惯组一体化中光纤惯组内台体温度变化曲线一致, 通电2h 后产品内部温度值不大于31℃, 与图7 惯组一体化内台体温度变化相当, 验证了惯组一体化热学设计的合理性。 同时, 对光纤惯组精度和惯组一体化产品精度进行了对比分析, 结果如表1 所示。 通过表1 可以看出, 二者精度相当,进一步验证了惯组一体化系统热设计的合理性。
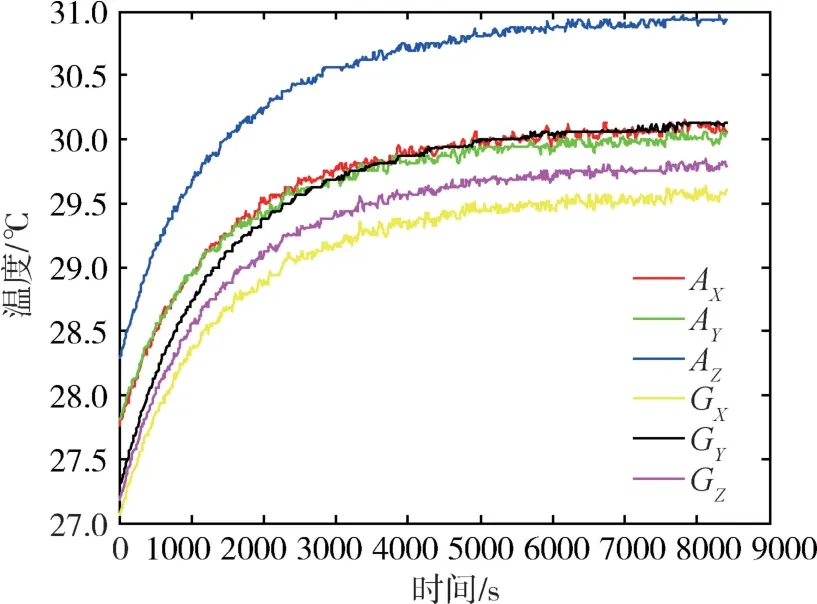
图8 光纤惯组内台体温度变化曲线Fig.8 Temperature variation curves of the inner-platform in the optical fiber IMU

表1 光纤惯组和惯组一体化产品精度对比Table 1 Accuracy comparison of optical fiber IMU and integrated IMU products
3.2 惯组一体化减振设计试验验证
以三套产品线振动试验结果为例, 惯组一体化产品减振特性试验结果如表2 所示。 通过表2 可以看出, 惯组一体化产品减振特性能够满足系统减振器指标要求值。

表2 惯组一体化产品减振特性试验结果Table 2 Test results of vibration reduction characteristics for integrated IMU products
3.3 惯组一体化角振动特性试验验证
为满足使用要求, 惯组一体化产品采用带阻和低通级联的多阶IIR 滤波器技术, 进一步提高了姿态控制的稳定性。 惯组一体化产品角频率特性如图9 ~图11 所示, 可以看出, 惯组一体化产品的幅频和相频特性满足任务技术指标要求, 证明了惯组一体化系统动态特性设计的正确性。

图9 X 方向角振动试验结果Fig.9 Test results of X-direction angular vibration

图10 Y 方向角振动试验结果Fig.10 Test results of Y-direction angular vibration

图11 Z 方向角振动试验结果Fig.11 Test results of Z-direction angular vibration
3.4 惯组一体化冲击响应谱特性试验验证
在运载火箭实际飞行时, 惯组一体化产品内部光纤惯组安装处X向需承受12000g大量级冲击加速度。 分析惯组一体化内部光纤惯组承受冲击响应谱特性, 对光纤惯组比较敏感的石英挠性加速度计进行了仿真试验分析, 结果如图12 所示。仿真结果表明,X向加速度计安装处响应量级为81.00g, 小于加速度计能够承受的最大量级。 对惯组一体化产品进行了冲击响应谱试验, 结果如图13 所示,X向加速度计安装处响应量级为68g,与仿真分析基本一致, 试验过程中惯组一体化产品性能稳定, 满足实际使用要求。

图12 X 向冲击响应谱仿真图Fig.12 Simulation of X-direction shock response spectrum

图13 X 向冲击响应谱试验结果Fig.13 Test results of X-direction shock response spectrum
3.5 惯组一体化六自由度试验验证
为考核惯组一体化在六自由度振动环境下的导航精度, 按照六自由度试验条件对惯组一体化产品进行了试验验证, 结果如表3 所示。 通过表3 可以看出, 惯组一体化产品能够满足使用要求。

表3 惯组一体化产品六自由度试验结果Table 3 Test results of 6-DOF for integrated IMU products
3.6 惯组一体化电磁兼容试验验证
根据运载火箭飞行过程中的电磁环境, 开展了电磁兼容试验, 试验项目如表4 所示。 电磁兼容试验的顺利通过, 表明了惯组一体化电磁兼容设计的合理性。

表4 惯组一体化电磁兼容试验项目Table 4 Test lists of EMC for integrated IMU products
3.7 惯组一体化半实物仿真试验验证
对惯组一体化产品开展了半实物仿真试验验证,光纤惯组内台体温度特性仿真结果如图14 所示, 温度特性与3.1 节结果一致。 同时, 惯组一体化产品仿真结果如图15 所示, 该数据进一步说明了惯组一体化设计方法可以适应运载火箭实际使用要求。

图14 惯组一体化内台体温度半实物仿真曲线Fig.14 Temperature semi-physical simulation curves of the inner-platform in the integrated IMU products
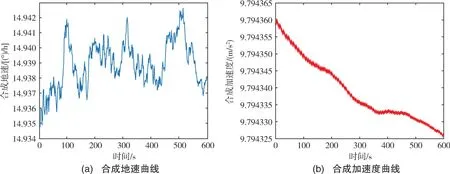
图15 惯组一体化半实物仿真数据Fig.15 Semi-physical simulation data of the integrated IMU products
3.8 惯组一体化试验合理性分析
根据运载火箭的使用要求, 开展了惯组一体化产品系列地面试验验证, 试验验证结果表明,惯组一体化产品能够覆盖运载火箭实际应用环境要求, 试验设计合理。 具体试验项目及满足情况如表5 所示。
4 结论
针对目前国内外运载火箭对控制系统电气设备提出的轻质化、 智能化和集成一体化的发展要求, 本文提出了一种基于VPX 架构的光纤惯组系统集成一体化设计方法。 该方法以光纤惯组为中心模块, 其余多个功能模块四周腔体内匀布, 各标准独立功能模块采用VPX 架构实现统一网络互联。 通过多项地面试验, 验证了该设计方法可以满足控制系统应用需求, 亦具有高集成、 小体积、 低成本、 标准化、 通用性强的特点, 相同功能的产品数量和质量与传统产品相比较, 可以降低35%。 结果表明: 该技术为控制系统单机一体化设计提供了新思路和新方法, 具有一定的工程应用价值。
