RTC360三维激光扫描仪在园林景观改造中的应用
2023-04-06王瑞鹏张晓刚孙元超孙晓丽
王瑞鹏 张晓刚 孙元超 孙晓丽
(1. 青岛市勘察测绘研究院, 山东 青岛 266032;2.青岛市地下空间地理信息工程研究中心, 山东 青岛 266032 3. 淄博水利勘测设计院有限公司, 山东 淄博 255035)
0 引言
在景观园林设计改造中,由于需要根据景观改造区域每棵树的平面位置分布、树径大小及园林地势走向进行改造方案设计,方案设计时仅依据传统1∶500地形图往往不能满足景观设计的需求。为了对景观设计中的测量要素进行测绘,传统测绘技术往往采用全站仪布设导线的方法对树木的位置及地形进行测绘,测量过程中存在外业测量时间长、树木位置数据漏测及树径无法统计的问题。三维激光扫描点云实景技术以其全要素高精度、高分辨率、高效率采集的特点实现海量点云数据的快速获取, 大大提高了外业数据采集效率以及可以连续反映被测物体的空间特征,可以满足景观设计的要求。
1 三维激光扫描技术及技术方案
1.1 三维激光扫描技术简介
三维激光扫描技术采用非接触式的激光测量方式,无须反射棱镜,采集可见目标表面点云的三维坐标信息[1]。它具有快速、无接触、实时性强、精度高、主动性强、全数字特征等特点。高精度三维激光扫描仪的出现为工程测量提供了一种全新的数据获取技术手段。
1.2 扫描技术路线
通过三维激光扫描仪进行景观园林改造树木位置及断面测量的技术流程如图1所示。

图1 园林景观测量技术路线
2 园林改造扫描测量案例
2.1 项目概况
项目位于青岛市主城区,为一座海拔较低的山体公园,公园周边为多层居民区,公园内部树木分布较为密集,基本为独立槐树及松树,无茂密的低矮灌木,公园内部有两处空地,全球导航卫星系统(global navigation satellite system,GNSS)信号接收良好,符合三维激光扫描仪外业测量的条件,测量现场如图2所示。
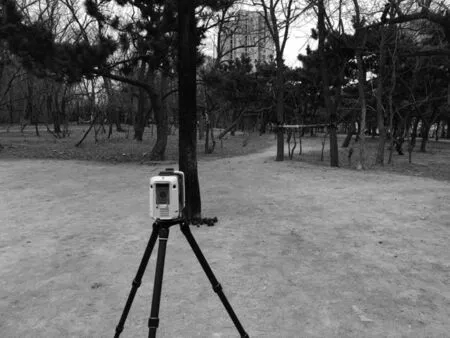
图2 山体公园树木分布
2.2 外业数据采集
2.2.1 标靶布设及测量
为将三维激光扫描数据转换到2000国家大地坐标系以及检核内业点云数据处理的正确性,在山体公园周边及内部较为空旷的地方均匀布设6个徕卡扫描仪黑白标靶,并利用青岛连续运行基准站下的网络实时动态载波相位差分技术(real-time kinematic,RTK)对黑白标靶的中心位置进行测量,如图3所示。

图3 黑白标靶分布图
2.2.2三维激光扫描测量
在公园内部视线良好的位置架设三维激光扫描仪,设置分辨率为低分辨率,打开RTC360激光扫描仪的VIS功能后开始扫描,为保证相邻测站有足够的点云重叠度,相邻测站间距保持在15 m左右,为方便内业点云数据处理时标靶中心坐标提取,测站布设时,需确保黑白标靶附近架设测站。本项目共架设42站,外业测量时间共70 min。
2.3 点云数据处理
三维激光扫描仪点云数据处理主要是通过RTC360配套的Cyclone Register360、Cyclone、CloudWorx for CAD以及全球统计数据/分析平台(economy prediction system,EPS)软件进行,具体处理过程包括点云拼接、坐标转换、点云降噪、点云提取以及内业成图等,如图4所示。
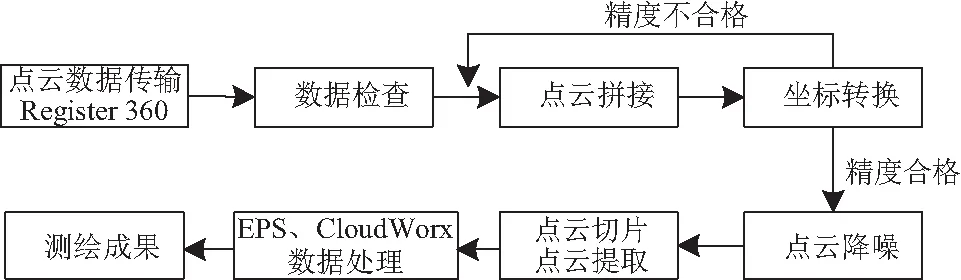
图4 点云数据处理流程
点云拼接是通过一定的约束条件将外业各测站的扫描数据配准到统一的坐标系下,拼接后得到一个完整的点云[2]。具体转换公式如下:
其中,X1,Y1,Z1为扫描仪测站1坐标系下的坐标;X2,Y2,Z2为扫描仪测站2坐标系下的坐标;X0、Y0、Z0为平移参数;εX、εY、εZ为旋转参数;k为尺度因子。
本文通过Cyclone Register 360自带的基于企业视觉识别系统(visual identity system,VIS)和点云视图的半自动拼接方式对不同测站间的点云进行拼接,确保了测站点云数据拼接的效率和准确性。拼接后的点云效果如图5所示。

图5 拼接后点云数据
坐标转换的原理与点云拼接一致,在Register 360软件中识别出黑白标靶的中心位置,将点云拼接后的独立坐标系下的点云数据通过空间相似变换公式转换到RTK测量的2000国家大地坐标系[3-5]。本次实验坐标转换精度指标如图6所示,由于6个黑白标靶在测区中均匀分布,通过坐标转换的平均误差为1 mm可以验证点云拼接的精度良好。

图6 坐标转换精度
对坐标转换后的点云数据进行降噪和抽稀处理[6-8],对点云数据进行水平切片,提取水平切片点云数据生成园林树木的轮廓分布图,并根据分布图中树木的周长对树木的树径进行统计分析,掌握园林中不同树径的树木分布情况,同时对不同树径分布区间的树木进行分层分色显示,方便景观改造设计时科学地制定树木迁移及保护方案。
将设计断面平面位置导入CloudWorx中,根据断面位置进行纵向切片精确提取设计断面附近的点云数据,生成指定位置的断面图,如图7所示。
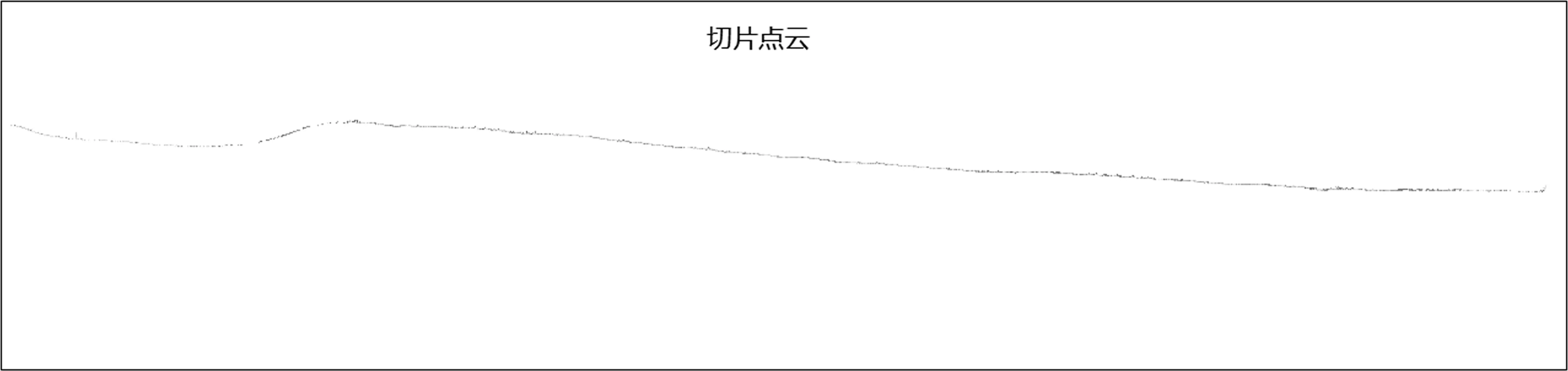
(a)切片点云
通过点云数据生成园林改造区域指定线路的断面图,保证了断面测量位置与规划道路中线垂直,避免了传统测绘方法中断面实地测量点偏离断面线的情况。根据生成的断面图,指导园林改造中路径的最优选择以及施工土石方量的计算。
2.4 精度分析
根据《城市测量规范》的要求[9],工程图中细部点点位中误差和高程中误差应符合表1的规定。
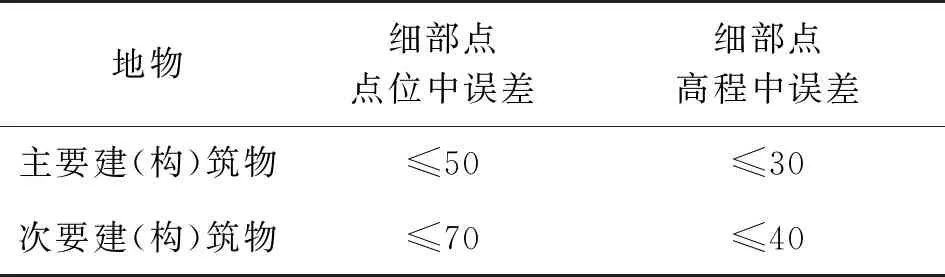
表1 细部点点位中误差与高程中误差 单位:mm
为了对扫描仪的测量精度进行验证,利用全站仪对园林周边多层建筑的房角点平面坐标及高程进行测量,并与扫描仪点云数据提取的建筑物平面坐标及高程数据进行对比分析[10-12]。经计算,平面中误差为0.019 m,高程中误差为0.028 cm,满足城市测量规范中工程图测绘的精度指标要求。
3 结论
RTC360三维激光扫描仪测量时无须对中整平即可实现点云数据的快速获取,扫描仪自带VIS视觉跟踪技术配合Register360软件实现了点云的高效精准拼接及坐标转换,CloudWorx插件使得点云数据与CAD的有效衔接,让内业成图更加方便快捷。
将三维激光扫描技术应用于灌木覆盖较少的独立树木测量,通过三维激光扫描测量快速高效的掌握树木的数量及口径,方便科学准确地制定树木征迁补偿方案,点云数据形象直观,可根据设计人员需求提供不同形式的成果数据,景观设计人员无须到达现场即可清晰掌握园林的现状情况。通过三维激光扫描实现了外业一次测量,内业数据随用随采,提高了生产效率。
在实际扫描测量中还存在以下不足和需要注意的问题:
(1)需要合理的规划扫描测量路线,避免数据重复测量及漏测,保证黑白标靶2~4 m范围内有测站布设,以方便内业数据处理时标靶中心的提取。
(2)扫描测量时注意扫描分辨率的合理选择,根据现场测量环境的不同,测站间可以搭配高中低不同分辨率进行测量。
(3)内业数据处理时需对点云拼接的可靠性进行检核,确保拼接后整体点云数据的精度。