光伏组件发电故障诊断方法研究
2023-04-04熊昌全温贤茂张宇宁唐道建
熊昌全,温贤茂,张宇宁,唐道建
(1.国家电投集团四川电力有限公司,成都 610299;2.国家电投集团四川电力有限公司甘孜州分公司,四川 康定 626099;3.国家电投集团西南能源研究院有限公司,成都 610213)
近年来随着经济的快速发展,我国开始实施“双碳”政策,逐步减少对传统化石能源的依赖,加快新能源发展[1]。太阳能作为新能源之一,以其清洁、可再生等优势得到了快速的开发与利用。随着光伏发电技术的快速提升与光伏电池板成本的逐渐降低,光伏电站建设规模显著扩大[2]。
由于光伏电站通常建立在比较偏远恶劣的环境中,光伏电站的绝大多数工作部件如电池板、逆变器等工作在室外环境中,需要承受着雨雪和高温等恶劣环境的侵蚀,会导致光伏电站工作特性恶化,甚至导致光伏电站故障频发,影响光伏发电的经济效益[3]。为了保证光伏电站设备的正常运行,光伏电站需要安排人员定期对电站设备进行巡检,对于某些重点设备甚至要进行一天多次巡检。随着光伏电场规模不断增大,光伏电站的运维成本显著增加,传统定期的人工维护已经不能满足快速发展的光伏电站。为了降低运维成本,提高故障识别率,越来越多的光伏电站开始对光伏发电系统运行状态进行监测与诊断,状态监测与诊断系统不仅可以实现对光伏电站的故障预警,防止因故障造成光伏电站发生严重事故,还可以降低光伏电站的维护费用。
1 光伏发电系统的主要故障
由于光伏组件特别是太阳能电池板多数长期处于气候条件恶劣的户外环境,随着工作时间的增加,光伏组件将不可避免的性能下降甚至发生故障。常见的光伏组件异常类型主要分为:阴影遮挡,热斑效应,组件老化、组件破裂,组件短路、组件断路和支架故障等[4](图1)。
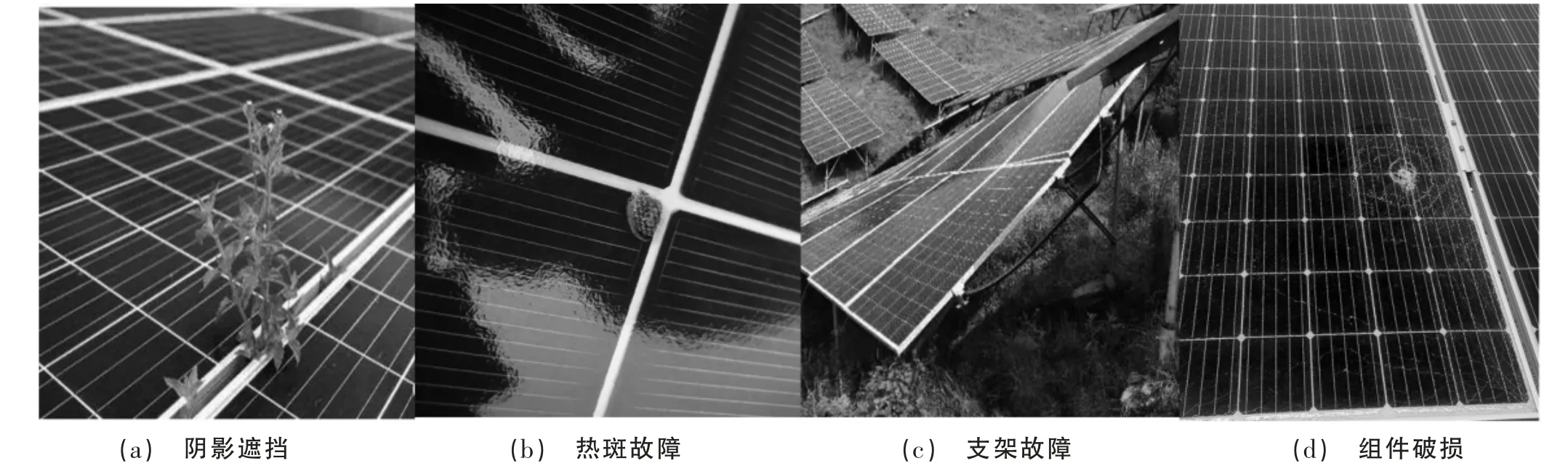
图1 光伏组件各种常见故障
阴影遮挡:是光伏组件最常见的异常情形,光伏组件经常受到野草或尘埃等杂物的污染,造成光伏电池板部分面积被遮挡。由于被遮挡部分光伏电流小于正常工作的其他部分,将导致所在光伏子串的旁路二极管导通,电池单元将处于反向偏置状态,作为负载消耗功率产生热量,使电池的局部温度升高,如果不及时清除不仅会造成功率损失,还有可能导致局部过热发生热斑现象[5]。
热斑效应:当光伏组件受到遮挡或其他因素影响时,组件间如果出现了失配现象,太阳能电池板局部过热将导致热斑现象发生[6]。光伏组件长期在这种状态下运行,会使得光伏组件加速老化,严重时甚至会焚毁,影响整个光伏阵列的安全。目前常见的解决措施是在光伏电池的两端并联一个旁路二极管,当失配现象出现时,电流大部分会流过旁路二极管,而不经过光伏组件,使得光伏组件不至于过热。当光伏组件出现热斑现象时,该部分光伏组件消耗部分组件输出功率,造成发电量的损失。
开路故障:主要由线路老化腐蚀断开、接头松动等引起,依据太阳能电池串联工作原理,单个组件的开路会直接引起该组件所在组串支路开路。在开路故障状态下,由于部分组串没有工作,光伏子阵在指定电压下工作电流下降,I-V 与P-U 曲线偏离设计特性曲线。光伏子阵系统逆变器是按照MPPT(最大功率跟踪)进行控制,开路故障不仅断路组串不能工作,还有可能导致整个子阵的发电效率下降。
组件短路:短路故障通常是各线路连接问题产生的故障,使得部分组件的电流和功率无法正常汇入光伏子阵,该支路光伏组串的开路电压下降,并导致最大功率点的电压也将偏离原设计值。同样,由于光伏子阵系统逆变器是按照MPPT 进行控制,短路故障也可能导致整个子阵的发电效率下降。
支架故障:支架类型主要分为固定式、单轴式和双轴式。由于光伏电站建设主要集中在气候条件恶劣的环境,支架极易受到影响,导致光伏追光支架追光功能失效,使得光伏阵列发电效率大幅度降低。
组件老化:由于光伏组件运行时间的增加,光伏组件的性能会随着使用时间及日常损耗逐渐偏离原设计曲线。组件老化故障主要影响光伏阵列的最大输出功率、最大功率点电压和最大功率点电流,进而导致整个子阵的发电效率下降。
组件破裂:在受到故意破坏、热应力或者冰雹等外力影响时,光伏组件顶端玻璃破裂,导致光伏组件内部容易受到腐蚀、出现短路事故,严重影响光伏组件的使用寿命。光伏组件的破裂情况不太严重时,对光伏子阵发电效率的影响较小,但严重时也可能造成发电功率的大量损失。
总体来讲,大部分的光伏组件异常基本都会导致光伏电池I-V 与P-U 曲线偏离设计特性曲线,进而导致整个光伏子阵的发电效率下降。因此,通过对光伏子阵在线运行数据中的电压、电流、功率及温度等参数进行监控分析,可以判断大部分的光伏组件异常情况。
2 运行状态监测与故障诊断
随着光伏电站的规模越来越大,国内外一些学者针对光伏故障诊断与状态监测,开展一系列相关研究。对于目前的光伏故障诊断方法根据使用的技术来看,可以分为3 种类型,一种是利用视频及图像处理的方法识别光伏组件故障,另一种是利用各种传感器对光伏组件进行状态判断,以及基于数据驱动的故障诊断方法[7]。
利用视频及图像处理的方法可以识别太阳能电池板及特定区域缺陷故障如:积灰、鸟粪、热斑、破裂和支架异常等。通常由无人机或巡检机器人携带可见光和红外相机对光伏子阵进行巡视,对所拍摄光伏组件的图片进行特征提取,利用相关深度学习和模式识别方法进行异常识别[8]。由于红外相机采用热成像方法,当光伏电池板存在热斑现象时会在红外图像中呈现明显的特征,是当前检测热斑故障最常用的方法之一。视频及图像检测方法通常只能发现光伏组件外表及与温度相关的一些故障,对于组件开路、短路以及老化等内部异常难以及时发现。
在食品腐败菌和病原体中具有抑菌作用的化学成分,如醇类化合物和酮类化合物等也存在于花椒的精油中[21],它们会完全抑制金黄色葡萄球菌、炭疽杆菌、枯草杆菌等10 种革兰氏阳性菌以及变形杆菌、炭疽杆菌、霍乱弧菌等7种革兰氏阴性菌的活性。
为了及时对光伏组件异常进行在线监测,还有学者根据光伏组件的故障特点在光伏组件上加装各类传感器。常见的传感器有电压传感器、电流传感器、温度传感器和姿态传感器等。该类方法通过对光伏各组件的各种电气参数及状态参数进行在线监控和异常检测与故障分析。虽然此类方法能及时判断相应的异常状态并精确定位故障位置,但是加装各种传感器,不仅需要增加额外投资,还涉及安装施工问题,对于规模化的光伏电站来说增加了经济成本和系统复杂度。
光伏电站SCADA 系统会采集光伏电站各部件的相关运行参数,这些参数通常反映了相关组件的运行状态。光伏逆变器将光伏电池板直流电压电流信号逆变成满足并网要求的交流信号,是当前SCADA 系统监控数据的主要来源。目前光伏电站主要趋势是采用组串式逆变器,逆变器将光伏电池板组串所发直流电进行逆变,经过交流汇流后由升压站升压并入电网。其中核心部件是组串式逆变器,不仅光伏组串的最大功率点控制都在逆变器按设定算法进行,还采集各光伏组串的相关电气运行参数,如电压,电流,频率及功率等(图2)。
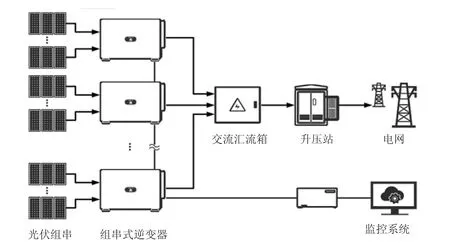
图2 组串式光伏电站结构
以某电站使用的某组串式逆变器为例,该逆变器可接入20 路光伏组串,在内部组合为10 路MPPT 电路对组串进行最大功率点跟踪,再通过逆变电路实现直流电到三相交流电的转换。组串式逆变器在进行逆变控制同时,还采集了各个组串的各类运行电气参数。各个逆变器的参数经过通讯总线传输到监控中心SCADA 系统中,SCADA 系统对于各类参数进行数据显示、统计、存储,用户可以在SCADA 系统中获取光伏电站各个组件的各类运行参数。
经过对光伏组件各种故障特性分析,大部分的光伏组件故障都会导致光伏电池I-V 与P-U 曲线偏离设计特性曲线,导致电气参数与正常运行工况有一定区别。通过对SCADA 系统中的光伏子阵在线运行数据电压、电流和功率等电气参数进行分析,提取故障特征进行故障诊断是一种较理想的方法。
光伏电站的运行会产生海量数据,如何根据运行数据进行特征挖掘从而运用于故障识别很多学者进行了深入的研究[9]。主要研究方法分为2 类,一是基于机理模型的诊断方法,一类是基于数据驱动的诊断方法。基于机理模型的诊断方法需要根据典型故障条件下光伏电池特征参数和输出特性的变化规律及相关运行特性曲线等得到光伏组件的机理模型,利用实际运行数据与机理模型匹配进行故障识别与判断。通常情况下,由于很难获取光伏组件真实准确的运行机理,同时光伏组件特性随着工况变化也会存在一些偏差,导致此类方法的鲁棒性和适应性相对较差。基于数据驱动的故障诊断方法通常不依赖于模型或者使用黑箱模型进行故障诊断,例如各种神经网络及深度学习算法等,是对光伏组件进行故障诊断的主要方法和研究热点[10]。
3 光伏组件运行数据特点
由于光伏场站工况复杂,运行数据随着时间、光照强度和天气情况等因素变化,显著存在非平稳特性及故障指标波动的特点,如图3 所示,光伏子阵功率数据受天气影响较大,普通采用单一的指标进行阈值判断方法很难实现故障诊断及健康状态预警。
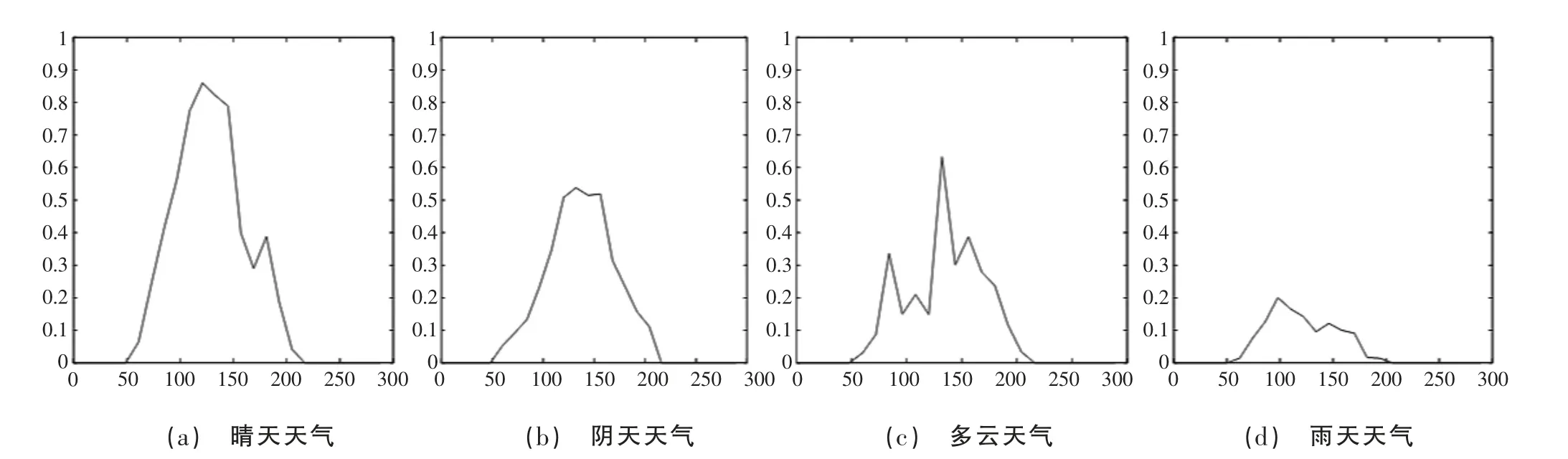
图3 光伏电站各种天气情况下的功率数据
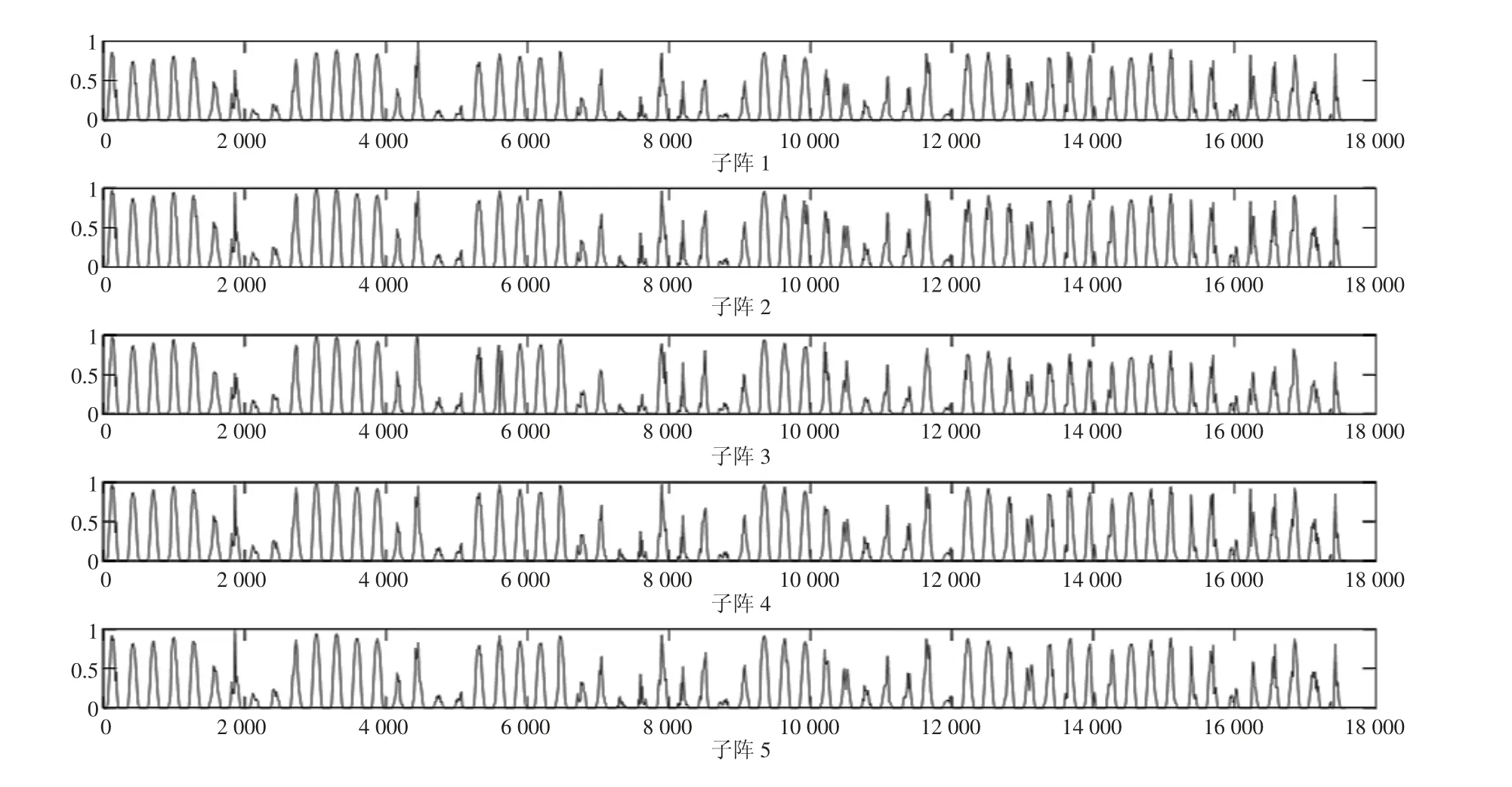
图4 不同子阵运行数据
绝大多数基于数据驱动的光伏组件故障诊断方法需要不同工况下各种故障数据对其模型进行训练,同时还需要对其识别的准确性、可靠性等指标进行验证。但是,某些光伏组件的故障在光伏电站运行过程中较少出现,光伏组件故障数据在SCADA 数据中所占比例很小,很难同时出现前文所述的各种光伏组件故障,这给算法的模型训练与验证带来困难。目前主要解决办法采取实际运行数据结合仿真数据进行混合训练与验证。Matlab 的Simulink 提供了相应的光伏电站运行仿真工具箱,利用该工具箱可以对光伏组件的各个参数进行设置,按照光伏电站结构搭建对应的仿真系统。在此模型上仿真各种光伏组件故障,得到具体的U-I 曲线及各种仿真数据,利用这些数据,对设计的各种算法进行训练和验证,进而完善算法的设计[11]。
4 基于PCA 的光伏组件故障诊断
PCA 算法是一种数据降维算法,是目前主流的基于数据驱动的故障诊断方法之一[12],通过对原始正常数据的坐标体系变换获得新的包含原始数据主要特征且彼此正交的2 个低维子空间,分别是主元子空间和残差子空间。主元子空间主要保留了原始正常数据的状态特征信息,残差子空间主要反映了与原始正常数据相悖的信息,也就反映了系统的异常,可以通过残差子空间相关指标的计算实现异常检测与故障识别。假设原始样本矩阵
式中:m 为样本数,n 为变量数。这里变量选择需要考虑时空关联性,针对某特定子阵,本文选择该子阵附近数据关联性较强的一些光伏子阵作为样本空间,这里n 为关联子阵的个数,m 为关联子阵在相似工况下正常运行一段时间内的数据样本量。PCA 样本的选取方法实际从原理上考虑各个光伏子阵运行数据的时空关联特性。首先为了消除数据大小差异对识别结果的影响,首先将样本矩阵标准化为均值为0、方差为1 的矩阵,再由下式计算协方差矩阵S
对协方差矩阵进行奇异值分解,可以得到前文所述的主元子空间S^和残差子空间S˜,
式中,Λ=diag(λ1,λ2,…λn),λ 为协方差矩阵的特征值;Λ 和为各子空间对应特征向量对角矩阵;P 为载荷矩阵为残差矩阵。
原始正常数据在主元子空间的投影对应了原始数据中的主要信息,在残差子空间的投影则对应与主要信息相悖的误差信息,因此主元子空间的信息可以近似地表达原始数据的信息,在实际的生产和应用中,降维在一定的信息损失范围内,可以很大程度简化原始过程特性分析的复杂程度。基于PCA 算法的故障检测则主要是通过PCA 模型的平方预测误差(Squared prediction error,SPE)统计量和霍特林(Hotellings T2)统计量进行的。其中SPE 统计量也称Q 统计量,是通过分析新数据的残差进行故障诊断的,衡量了该数据点不能被PCA 模型所描述的信息量大小,反映的是破坏变量整体趋势的局部情况[13],计算方法如下
T2统计量衡量的是包含在PCA 模型中的信息大小,表示标准分值平方和,反映的是变量整体趋势被改变的情况,计算方法如下
搭建模型时,先由历史正常数据训练PCA 模型,计算出SPE 和T2控制限,然后将新数据载入模型,计算出SPE 统计量和T2统计量。对于这2 种统计量,会有以下4 种情况:①SPE 和T2统计量都不超过控制限;②SPE 正常,T2超过控制限;③SPE 超过控制限,但T2正常;④SPE 和T2统计量都超过控制限。一般认为①和②为正常,③和④为系统出现故障。
故障诊断模型的搭建流程主要包括样本选取、数据预处理、模型训练和模型校验等[14]。根据光伏阵列的运行特性,本文选取包括光照强度、逆变器两侧功率、电压和电流等具有强关联性的参数进行建模。首先将光伏子阵各个子阵正常工况下的运行数据作为PCA模型的训练集,当某一光伏组件发生短路故障时运行数据,模型诊断结果如图5 所示,可以看出该部分T2统计量和SPE 统计量均大于控制限,表示系统出现故障。可以看出,PCA 方法可以及时发现光伏组件的异常情况。
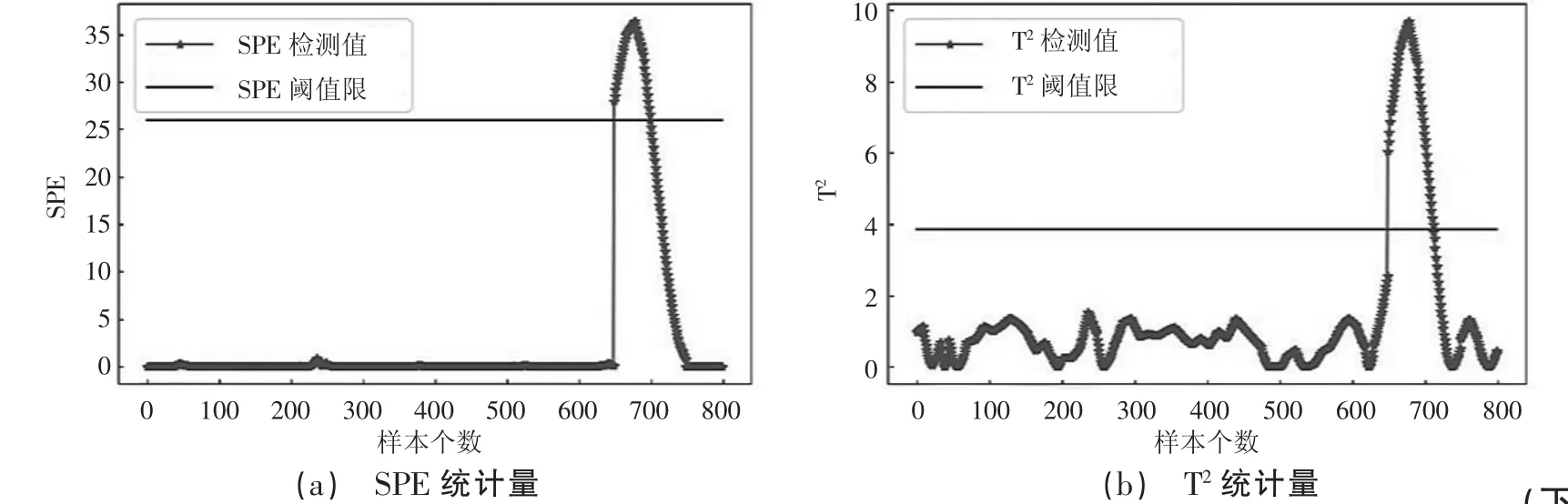
图5 子阵异常诊断结果
5 结论
本文对光伏电站故障诊断问题进行了研究,在分析光伏电站各种故障及故障数据特点的基础上,对各种光伏电站故障诊断方法进行分析对比,采用主成分分析法建立故障诊断模型。最后,通过实际运行数据和故障数据对模型的准确性进行了验证,表明采用基于数据驱动的PCA 故障诊断方法可以有效发现光伏组件运行异常。
