基于Solid Works 的转盘式沙漠种植机设计
2023-04-04刘智豪石佳磊郭朝阳魏若旭
刘智豪,石佳磊,郭朝阳,魏若旭,李 兵
(陕西国防工业职业技术学院 智能制造学院,西安 710300)
随着我国绿色环保事业的不断发展,植树造林工作不断深入,沙漠戈壁植树工作大力开展,各类种植机械层出不穷。沈阳大学的关佳征[1]设计了一款戈壁沙漠植树机器人,可在各类复杂地形中实现树苗的转运、树坑挖掘、树苗栽种和土壤夯实等一系列作业。南京理工大学泰州科技学院的殷劲松等[2]设计了一款小型全自动植树机,通过对电机的控制完成钻孔、植苗和填土等一系列种植工作。辽宁科技大学的马浩钦等[3]对沙漠自动植树机器人进行了创新设计,该植树机器人以太阳能为能量来源,设计的可改装底盘装置可适应沙漠地形作业;设计的分选转盘装置可实现分苗作业;设计的浇水储水装置可实现种植完成后对树苗进行喷水作业。新疆石河子炮台土壤改良试验站的朱拥军等[4]针对新疆戈壁沙漠环境特点,采用滴灌方法对榆树进行种植,实现对荒漠环境改良的目的。甘肃畜牧工程职业技术学院的白仕珑等[5]针对山地丘陵等复杂地形,设计了一款多功能自动铺膜装置,可有效解决薄膜拉紧、节省工时等问题,极大地提高了铺膜效率。兰州石化职业技术学院的李卫卫等[6]设计了一种多功能立体沙漠压沙种草机,可实现秸秆铺设和种草的目的。
基于以上研究,本文介绍一款转盘式沙漠种植机,可很好地完成机械设备在沙漠中钻孔、储苗、植树和覆土一系列作业。
1 转盘式沙漠种植机结构设计
转盘式沙漠种植机由钻孔单元、旋转盘植树单元、覆土单元和设备车体构成。以直径为1~2 cm、高35~55 cm 的树苗作为研究对象,整体结构尺寸均以此作为设计标准。图1 为转盘式沙漠种植机设计图。图2为整机运动流程图。
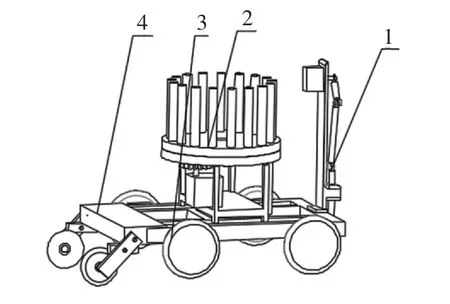
图1 转盘式沙漠种植机设计图
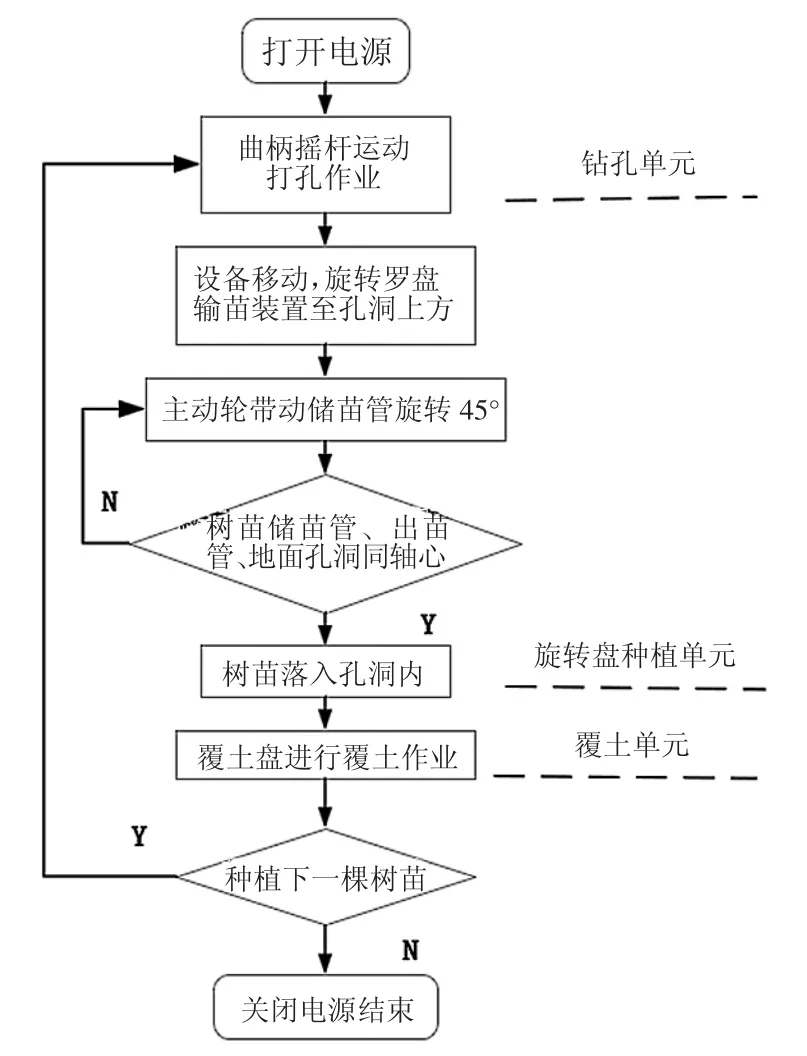
图2 整机运动流程图
首先,将栽植树苗放置在旋转盘植树单元的储苗管内,开启电源,钻孔单元在地面打孔;其次,驱动电机启动,设备运转前进,将旋转盘植树单元的出苗口移动至钻孔上方,旋转盘植树单元中转盘旋转至树苗储苗管、出苗管与地面空洞三者同轴心时,输苗落入孔洞内;然后,驱动电机再次启动,设备运转前进,覆土单元将两侧沙土覆盖在树苗两侧固定树苗,完成1 次种植,后续重复以上流程;最后,种植结束,关闭电源。
1.1 钻孔单元设计
钻孔单元需在沙漠中进行钻孔作业,由步进电机、连杆、直杆、轴用轴承和钻头5 部分组成。整体运动采用曲柄滑块机构。步进电机带动曲柄连杆运动,钻头与直流电机连接固定在一起,钻头进行竖直方向往复运动,从而实现在沙漠种植时钻孔作业。根据树苗尺寸范围,孔深最大可达30 cm。图3 为钻孔单元。
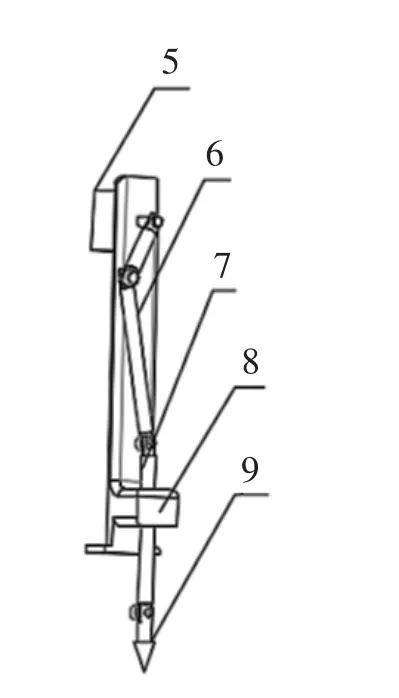
图3 钻孔单元
1.2 旋转盘种植单元
旋转盘种植单元分为储苗部分与出苗部分,由储苗管、空心转盘、主动轮、从动轮、步进电机、出苗管和支架几部分组成。
空心转盘分为上下2 部分,下部分通过支架固定,连接主动轮、步进电机及出苗管,上部分连接储苗管、从动轮。将输苗存储在储苗管内,设备运动,使得出苗管出口运动至与钻孔单元孔洞同轴心。步进电机提供动力,连接主动轮带动从动轮使空心转盘上部分旋转,当储苗管与出苗管同轴心时,即此时存有树苗的储苗管、出苗管及孔洞3 者同轴心,储苗管内树苗通过出苗管落入孔洞中,完成树苗种植作业。图4 为旋转盘种植单元。
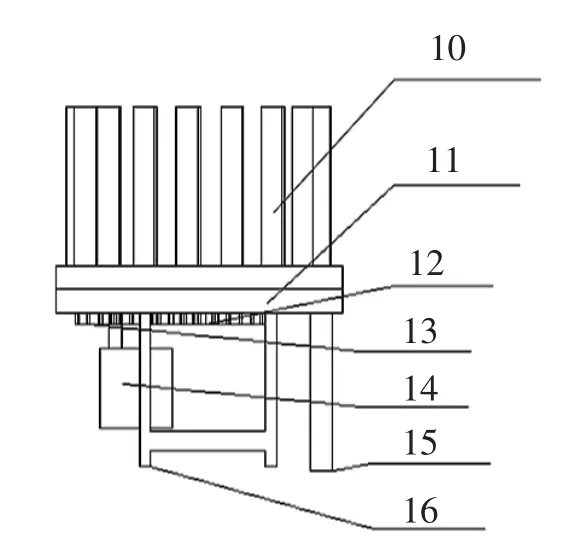
图4 旋转盘种植单元
1.3 覆土单元设计
覆土单元主要负责在树苗种植后的沙土回填,覆土单元由U 型支架、立方杆及覆土盘几部分组成,两侧的覆土盘通过U 型支架固定在车体后侧,倾斜角度可根据实际需求进行调整。由车体运动从而带动覆土盘前进,将两侧的沙土回填到树苗孔洞内固定树苗,减少人工成本。图5 为覆土单元。
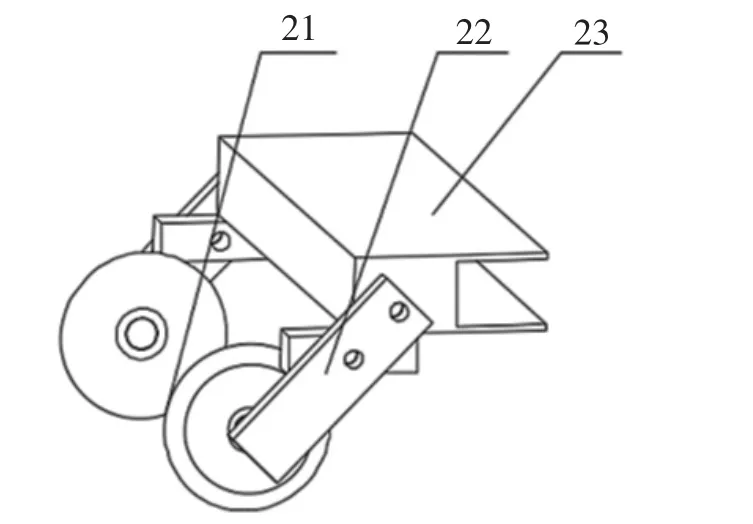
图5 覆土单元
1.4 设备车体设计
设备车体包括驱动轮和车架,安装有供电设备与控制装置,整体通过要以保证整体设备的控制运动。由迈克MC 遥控器发射信号,作用于电子调速器,电子调速器将12 V 电流转为可控电流作用于直流电机,实现了对直流电机的控制,进而可实现对车体的运动控制。图6 为设备车体设计。
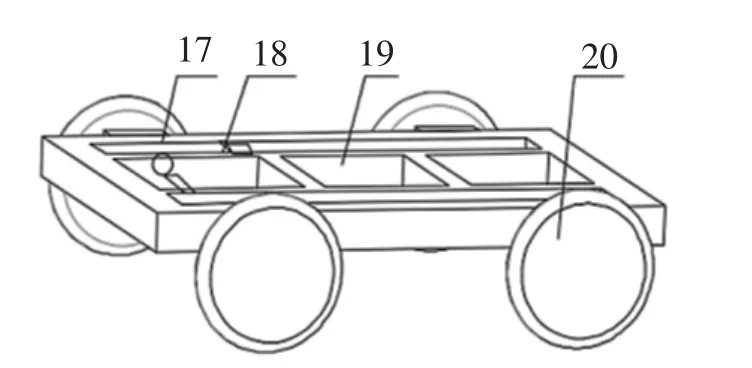
图6 设备车体
2 运动仿真分析
在结构设计过程中,使用Adams 2016 软件对钻孔单元,进行运动仿真分析,以确定其最终合理设计尺寸[7]。根据树苗长度直径及种植深度,确定曲柄长度LAB=12.5 cm,连杆长度LBC=17.5 cm,滑块最大行程为Smax=LAB+LBC,最小行程为Smin=|LAB-LBC|,即打孔作业时,钻头在5~30 cm 范围内进行往复运动。图7 为曲柄滑块机构原理图。
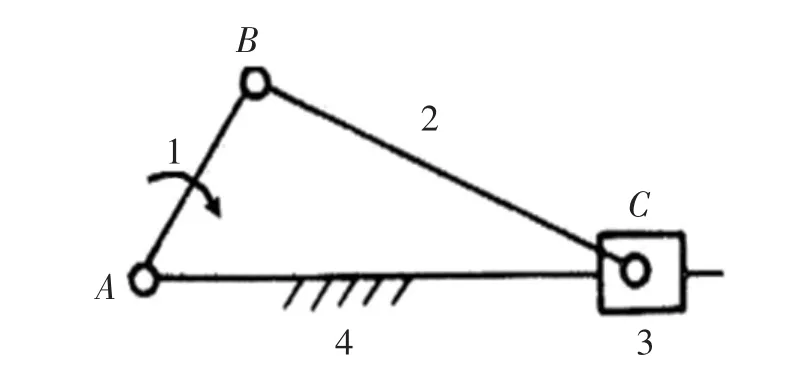
图7 曲柄滑块机构原理图
在给定连杆尺寸情况下进行动态仿真分析,仿真时间设置为60 s,步数为700。最终得到曲柄摇杆的位移、速度和加速度的曲线图,根据经验分析可知设计满足要求。图8 为曲柄滑块机构的运动特性分析。
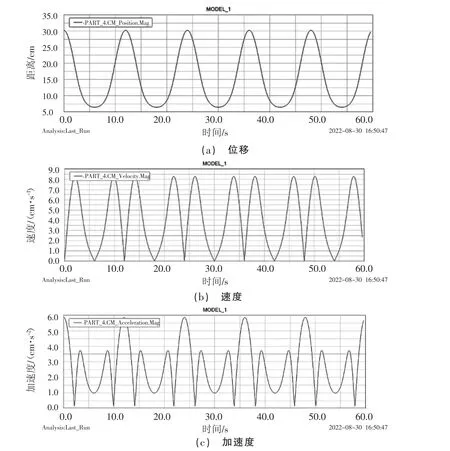
图8 曲柄滑块机构运动分析图
通过对转盘式沙漠种植机各单元机械结构的设计,以及对打孔单元的运动分析,装配后得到沙漠种植机的整体模型。该设备不受场地的限制,可以适应多种环境,应用广泛;自动化程度高,大量地减少了人工的成本,操作简单后期维修保养成本底;使用遥控控制整体机械可操作空间,容错率大大提高;采用科学的方式精准计算打孔深度提高了树苗的存活率。图9 为转盘式沙漠种植机整体三维模型。
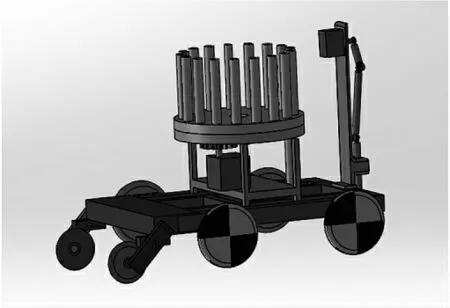
图9 转盘式沙漠种植机三维模型
3 结束语
设计的转盘式沙漠种植机代替了人工,可在更少时间内完成更多工作,提高沙漠植树效率。在技术实现方面,该装置的结构按照现有车体的尺寸及设计的空间布局进行设计,适用性强。采用常见的曲柄摇杆机构、齿轮传动机构结构简单,制成本更低,实用性高。动力及运动方面,消耗功率小,整体操作方便,简单灵活,后期维护成本低。其由打孔单元、旋转罗盘单元、驱动单元和覆土单元组成,操作简单种植效率高、树苗存活率高,极大地减少人工成本。不仅对我国防风固沙、沙漠绿化有很大益处,还可以产生较大的社会效益。
