靶机挂载可变RCS龙勃透镜时的RCS起伏特性
2023-03-27陈召涛许盼福
章 辉,陈召涛,许盼福
(南京模拟技术研究所,江苏 南京 210016)
靶机作为构设空军蓝军的关键要素,广泛应用于军队的武器装备试验及军事训练,从武器装备考核出发,要求空中靶机雷达散射特性与真实敌机尽可能相近。作为训练耗材,靶机尺寸通常小于常规敌机,因而靶机自身的RCS 比真实敌机要小。为了更加准确地模拟真实敌机的RCS特性,在靶机机头和翼下挂载了可变RCS的龙勃透镜,以此模拟真实敌机周向RCS起伏特性。
龙勃透镜的概念于1944 年被R.K.Luneberg 提出。经过几十年的技术更新后,这种具备低制造成本、高增益的非均匀介质球被广泛应用于航空、航海等领域[1-7]。但目前靶机挂载的龙勃透镜一般为固定龙勃透镜,即球体和反射面连成一体,用于RCS 增强时,只能定向增强,调整起伏特性时须重新拆装,更换不同尺寸龙勃透镜费时费力。针对目前龙勃透镜用作RCS定向增强时使用不便等问题,本文提出了1种反射面可调的龙勃透镜,通过控制反射面来径向移动实现靶机RCS 数值的变化。相较传统固定龙勃透镜的安装方式,此种方式可以根据不同敌机的RCS数值及起伏特性,自由组合各龙勃透镜反射面径向位置和所在方位,使挂载可调RCS龙勃透镜的靶机能更加真实地模拟敌机的RCS 特性,且具备无须重新拆装、使用简便等优点。
1 可变RCS龙勃透镜特性
龙勃透镜一般由不同介电常数发泡材质组成的介质球、反射面2 部分组成。入射电磁波经过介质球折射后汇聚于反射面,之后形成强的后向散射,龙勃透镜便具备了RCS增强效果。
1.1 龙勃透镜本体RCS特性
龙勃透镜包括介质球、反射面2 部分,详见图1。通过改变反射面相对多层介质球的径向位置,可实现龙勃透镜RCS 起伏特性的调节。介质球材料属性为发泡材质聚氨基甲酸酯,反射面为金属面。

图1 龙勃透镜构型Fig.1 Structure of Luneberg lens
介质球由介电常数依次改变的多层介质层组成,示例3层介质球由内部介质层、中间介质层、外部介质层组成,相对介电常数依次为1.96、1.79 和1.48,球体半径依次为22 mm、36 mm 和52 mm。初始状态介质球和金属反射面相距8 mm,金属面构成的球体半径为60 mm,金属面覆盖区域对应的球心角为120°。通过电磁散射仿真软件进行建模、网格划分,并进行相关计算参数设置。为方便计算,模型略去相关调节机构,取对RCS占主要贡献的球体和反射面进行网格划分,网格如图2所示。

图2 龙勃透镜模型网格Fig.2 Mesh of Luneberg lens model
仿真参数设置为X 波段(10 GHz),俯仰角为-10°、0°、10°,极化方式为VV 极化。由于龙勃透镜具有对称性,方位角取一半计算,即0°~90°,具体角度定义参照软件说明[8-15]。计算采用MLFMM 快速多层多极子方法,计算后绘制龙勃透镜的起伏特性曲线如图3所示。
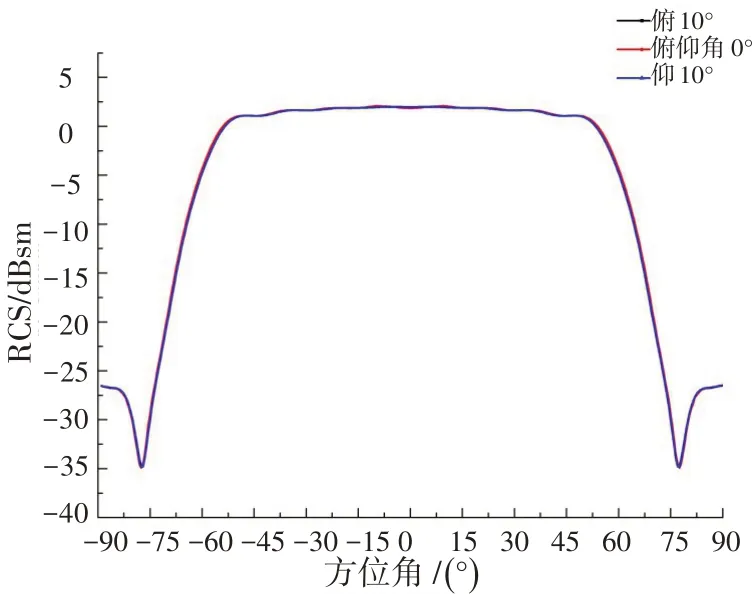
图3 不同俯仰角下龙勃透镜RCS对比图Fig.3 Comparison of RCS of Luneberg lens at different pitch angles
在-10°~10°俯仰角下的龙勃透镜RCS起伏特性曲线几乎重合,表明在此俯仰角域区间内,龙勃透镜的增强效果具有一致性,且可实现±55°角域内的稳定增强,也验证了龙勃透镜在实际应用中可实现稳定大角域范围增强。
表1汇总了前向±30°角域内的RCS均值。龙勃透镜本体反射面未径向移动,角域为前向±30°,俯仰角为-10°~10°,RCS均值为1.539 m2。
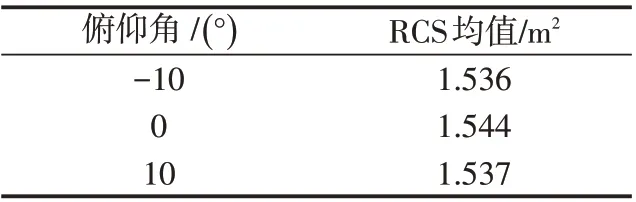
表1 龙勃透镜不同俯仰角下前向±30°的RCS均值Tab.1 RCS mean values for forward ±30°of Luneberg lens at different pitch angles
1.2 龙勃透镜反射面调节时RCS特性
当反射面沿着远离球体方向向外径向移动时,入射电磁波经过介质球折射后并非汇聚于反射面。因此,其RCS散射特性会发生改变。在初始位置上反射面沿径向后移5 mm、10 mm、20 mm这3 种状态,为了方便观察略去了调节机构,移动后状态图,如图4所示(3种状态分别标注为1、2和3)。
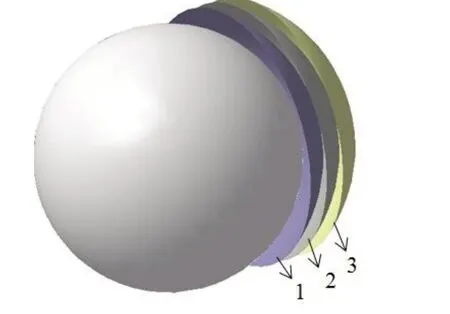
图4 反射面移动状态Fig.4 Movement state of reflecting surface
取俯仰角为0°,计算状态同龙勃透镜初始状态,RCS曲线如图5所示。
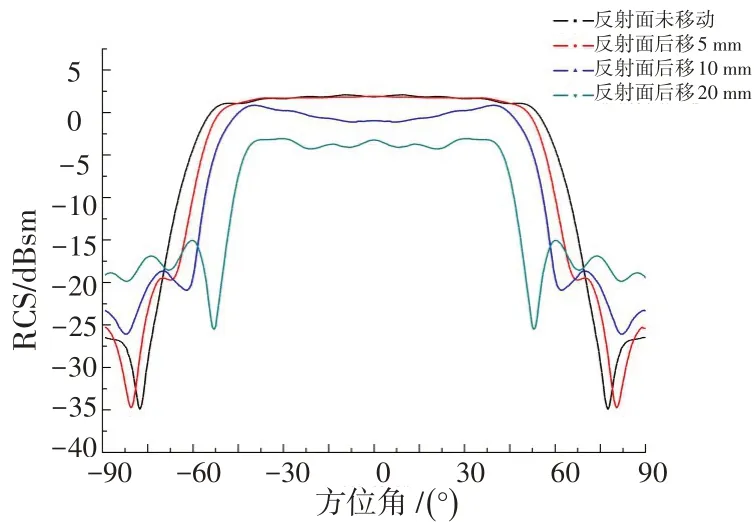
图5 龙勃透镜反射面在不同位置时RCS对比Fig.5 Comparison of reflection surface of Luneberg lens at different positions
当反射面向远离介质球方向移动后,龙勃透镜的雷达散射强度和强散射区域都发生了改变,移动后龙勃透镜的RCS强度减小了,强散射区域也缩小了。当反射面沿径向移动20 mm 后,稳定增强的角域从±55°缩小到±40°。
前向±30°RCS平均值汇总如表2所示。
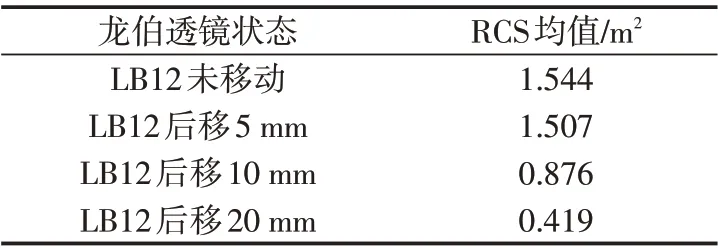
表2 龙勃透镜反射面在不同位置前向±30°的RCS均值Tab.2 RCS mean values for forward ±30° of reflecting surface of Luneberg lens at different positions
文中的龙勃透镜反射面移动20 mm后,前向±30°角域内RCS均值从1.544 m2减小到0.419 m2。这也证明:反射面的移动可以改变单个龙勃透镜3 dB波束宽度和RCS均值。
2 靶机挂载龙勃透镜RCS特性
根据模拟敌机的RCS起伏特性需求,可在靶机头部、翼下布置可调RCS 龙勃透镜。实战中,可通过实时调节龙勃透镜反射面的位置来实现靶机RCS 值的改变,从而达到迷惑地面防空武器的效果[16-20]。靶机挂载可变RCS龙勃透镜时,选取多个反射面不同方位角和径向移动量的组合,可模拟出不同敌机的RCS特性曲线,为地面防空作战提供高逼真度的训练靶机。
2.1 靶机挂载龙勃透镜RCS计算状态
目前,机体前向和后向RCS增强是军方的一大需求。作为前期研究,本文将靶机挂载龙勃透镜后RCS研究的角域取前向±30°,后向角域研究思路与前向类同。相关靶机外形和计算角域方位图,如图6所示,靶机命名为A靶机。
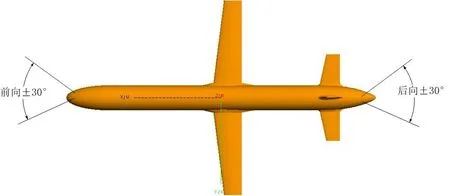
图6 靶机计算角域Fig.6 Calculation angle domain of drone aircraft
靶机挂载龙勃透镜仿真参数设置同上述龙勃透镜模型,靶机尾喷口进行修型处理,仿真设置:靶机表面为电良导体,计算中勾选“Combined field”选项,其余设置同龙勃透镜模型。
2.2 靶机前向增强时RCS起伏特性
可变RCS 龙勃透镜的挂载模式为头部1 枚,两侧翼下各1枚,具体模型如图7所示。
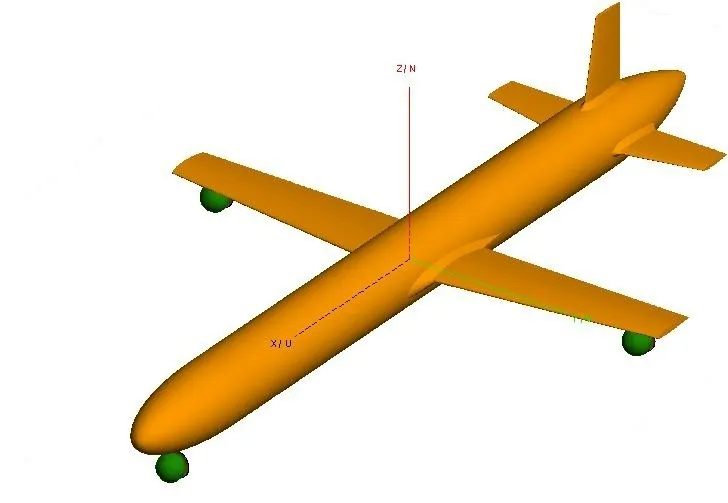
图7 靶机前向增强模型Fig.7 Forward RCS enhancement model of drone aircraft
文中对比研究了靶机未挂载龙勃透镜和挂载龙勃透镜时反射面正对机头无径向移动和反射面正对机头径向后移动10 mm、20 mm相应状态下的RCS特性,特性曲线汇总如图8 所示。靶机挂载可调龙勃透镜后,RCS起伏特性曲线与单独龙勃透镜反射面径向后移的变化规律一致,随着龙勃透镜反射面径向后移,靶机前向RCS 增强效果减弱。这也证明:通过反射面的径向移动可实现挂载可变RCS 龙勃透镜靶机RCS起伏特性曲线改变。
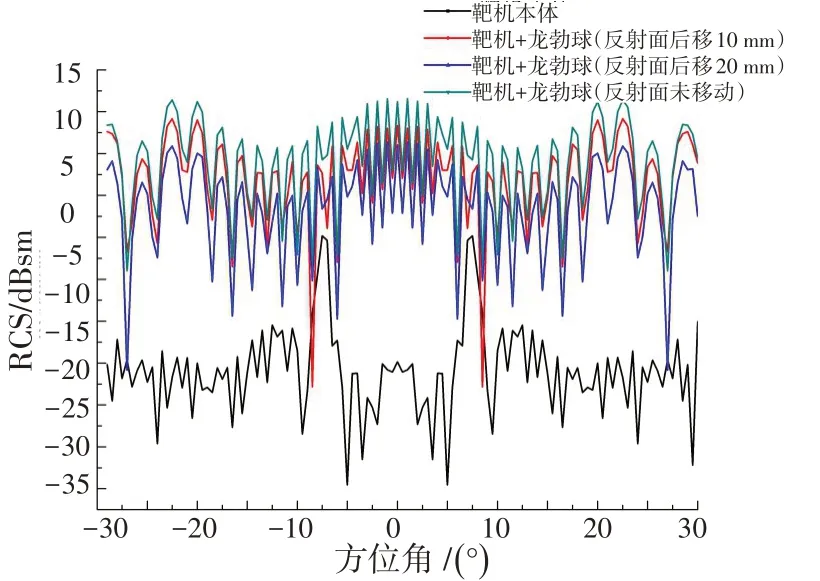
图8 反射面不同径向位置靶机前向±30°RCS起伏曲线Fig.8 RCS fluctuation curve for forward±30°of drone aircraft at different positions of reflection surface
前向增强状态下RCS均值见表3。靶机裸机前向±30°RCS 均值为0.021 4 m2,挂载龙勃透镜反射面后移20 mm 时前向±30°RCS 均值为1.275 m2,反射面未后移时前向±30°RCS 均值为4.509 m2。说明反射面的不同径向移动组合可实现A靶机前向±30°RCS均值在0.021 4~4.50 9 m2内可调。
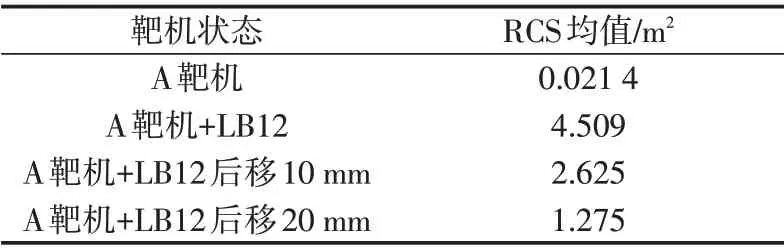
表3 靶机前向增强状态下前向±30°的RCS均值Tab.3 RCS mean values for±30°forward of drone aircraft at forward enhancement mode
2.3 MQ-1前向起伏特性的拟合
美国MQ-1 无人机是一款高空长航时察打一体无人机,是各国军事竞赛中的强大作战武器[21]。MQ-1 无人机机长8.75 m,翼展14.85 m,而靶机长为3 m,翼展为1.6 m。为了更加贴近该型无人机的RCS起伏特性,靶机在机头和翼下挂载可变RCS 龙勃透镜,机头龙勃透镜反射面正对机头,翼下两侧的龙勃透镜反射面正对两侧,反射面无径向后移。MQ-1 无人机和靶机如图9所示。
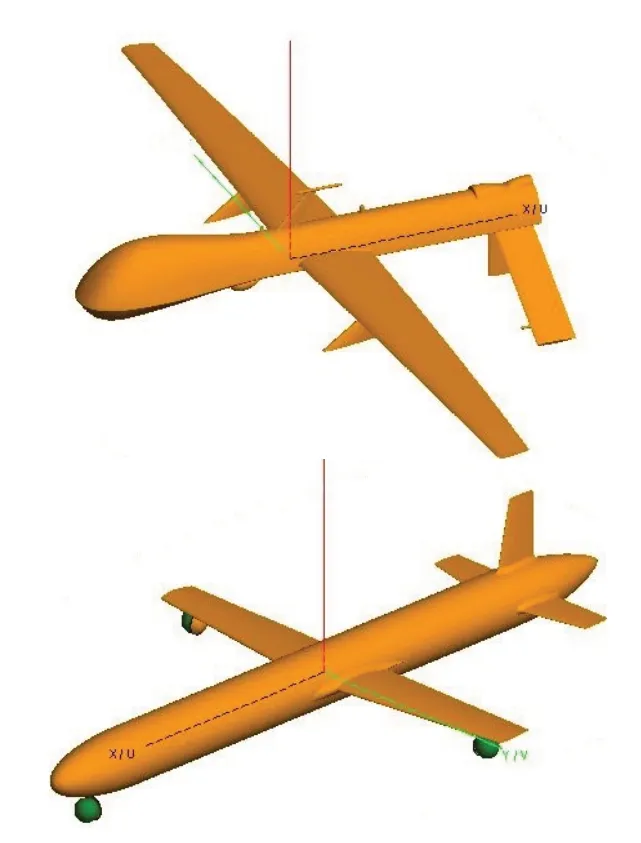
图9 2种机型模型Fig.9 Two aircraft models
利用仿真软件计算MQ-1 无人机和靶机RCS 前向起伏特性。仿真时,参数设置为C波段(5.6 GHz),俯仰角为0°,极化方式为VV 极化,计算角域为前向±30°。MQ-1 机体尺寸较大,划分网格数目为77万。为了快速计算,采用PO方法,靶机挂载龙勃透镜计算采用MLFMM方法。
RCS起伏特性仿真曲线如图10所示。
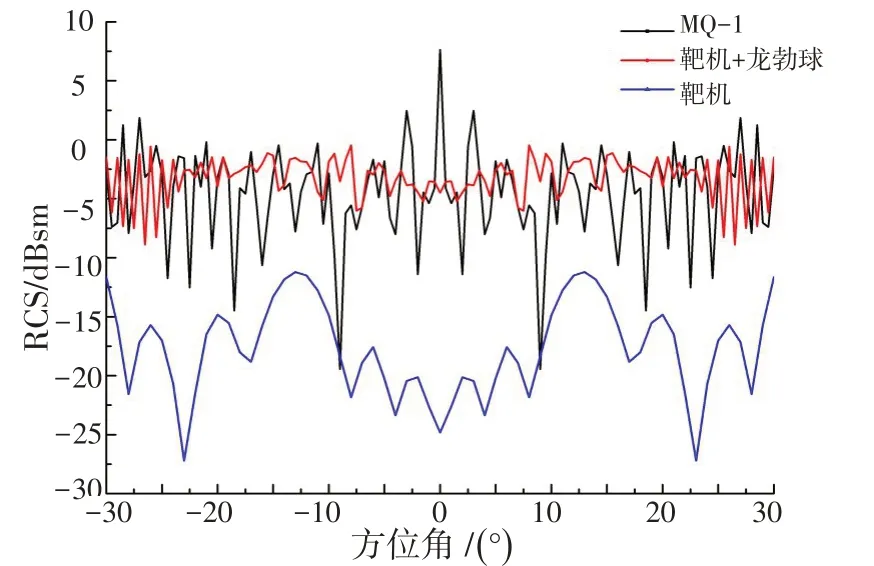
图10 MQ-1无人机和靶机前向RCS起伏曲线对比Fig.10 RCS fluctuation curve for forward±30°of MQ-1 UAV and drone aircraft
当靶机未挂载龙勃透镜时,由于机体尺寸上的差异,靶机的RCS 起伏曲线远低于MQ-1 无人机本体;当靶机挂载龙勃透镜后,除在前向±5°内,MQ-1 无人机RCS存在较强散射,有3个尖峰,其余方位角内挂载龙勃透镜靶机RCS 曲线和MQ-1 无人机的可基本吻合。RCS 统计均值如表4 所示。靶机本体RCS 均值为0.024 9 m2,远小于MQ-1 无人机的0.513 m2。挂载可变RCS 龙勃透镜靶机RCS 的均值为0.516 m2,与MQ-1 误差小于1%。两者起伏特性曲线和RCS 均值相吻合,从原理也可说明靶机挂载可变RCS龙勃透镜模拟作战飞机方法是可行的。
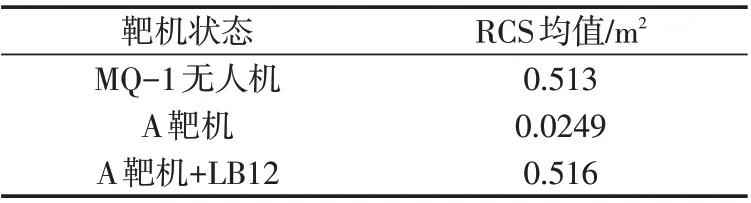
表4 MQ-1无人机和靶机前向±30°的RCS均值Tab.4 RCS mean values for ±30°of MQ-1 UAV and drone aircraft
3 结束语
本文分析了反射面沿径向移动的可调RCS 龙勃透镜的RCS 起伏特性,对比分析了A 靶机挂载可变RCS 龙勃透镜时的前向RCS 起伏特性。计算结果验证了反射面的径向后移可降低靶机的RCS 数值。因为反射面沿径向后移,雷达波汇集于发射面之前,反射波回波强度变弱。
靶机挂载可变RCS龙勃透镜时,选取反射面不同径向值的组合,可模拟出不同作战飞机的RCS特性曲线。本文采用靶机挂载可变RCS 龙勃透镜对美军MQ-1无人机前向RCS起伏特性进行了模拟,为采用靶机挂载可变RCS 龙勃透镜模拟作战飞机RCS 起伏特性奠定了基础。
