以RCP 平台为支撑的电动汽车整车控制器软件开发研究
2023-03-19黄浩
文/黄浩
本文以电动汽车为研究对象,基于RCP(快速控制原型)平台,在原整车控制器硬件基础上,运用ECoCoder(全自动代码生成工具)自动生成整车控制器软件开发平台;最后借助MeCa 软件对整车控制器进行实时标定和代码刷新,进而完成整个开发工作。
当前,国内各主流主机生产商在整车控制器开发方面均获得长足进步。但仍有部分主机生产商在电动汽车整车控制器开发过程中,沿用传统燃油车的控制器开发技术和思路,如总成拼接的逆向开发模式等。进而使得开发出的整车控制器软件技术落后于市场需求,整车控制器的性能无法满足新能源汽车的运行要求。
一、RCP 平台及ECoCoder软件概述
1.RCP 平台
RCP 对应的是快速控制原型技术。作为一种新型仿真工作流程,其支持最终产品在开发完成前,基于设计理念、数学和物理学模型,以一台通用设备为载体,进行控制算法验证,并通过实体实验完成性能测试。RCP平台的最大优势在于,其能够大幅缩短控制策略的开发周期,并且支持开发者执行快速迭代实验,以识别和解决潜在问题。[1]在实际开发过程中,RCP 平台多采用V 型开发模式,即以图形化建模的方式建立软件工程,进而支持应用类和基础类软件模型代码的有效生成,并最终实现统一平台下的软件开发和产品生产。
2.ECoCoder
ECoCoder以Simulink软件(一种模块图环境,常用于多域仿真或基于模型的设计)为依托,在友好用户界面的支持下,可以快速为开发者提供基础软件模型和ECU(电子控制单元)控制算法模型的选配支持信息,并在此基础上快速生成产品代码。利用ECoCoder生成代码,不仅效率高,而且生成的代码普遍具有较高的可靠性和适用性,能同时满足快速原型控制器和产品开发需求,并在汽车电控系统开发工作中发挥关键作用。
二、Simulink 模型库
ECoCoder 主要涉及两个源自Simulink 的核心模型库,分别是芯片级模型库和控制器级模型库,二者的详细信息如表1、表2 所示。
三、整车控制器软件开发
(一)整车控制器和网络拓扑架构
某电动汽车品牌基于RCP平台,按通信需求开发整车控制器软件,其控制器架构主要包括电源电路、输入输出模块和CAN 通信模块等(见图1)。[2]其中,电源为24V车载蓄电池;输入模块涉及启动、变挡、加速及制动等信号模块;输出模块主要由DCDC 转换器、电机控制器、电池管理系统(BMS)以及三合一控制器等构成;CAN 总线则是整车控制器与电机、电源、变速箱等各分部控制器进行信号传递、反馈的通信路径。上述设备共同构成了整车网络拓扑结构。
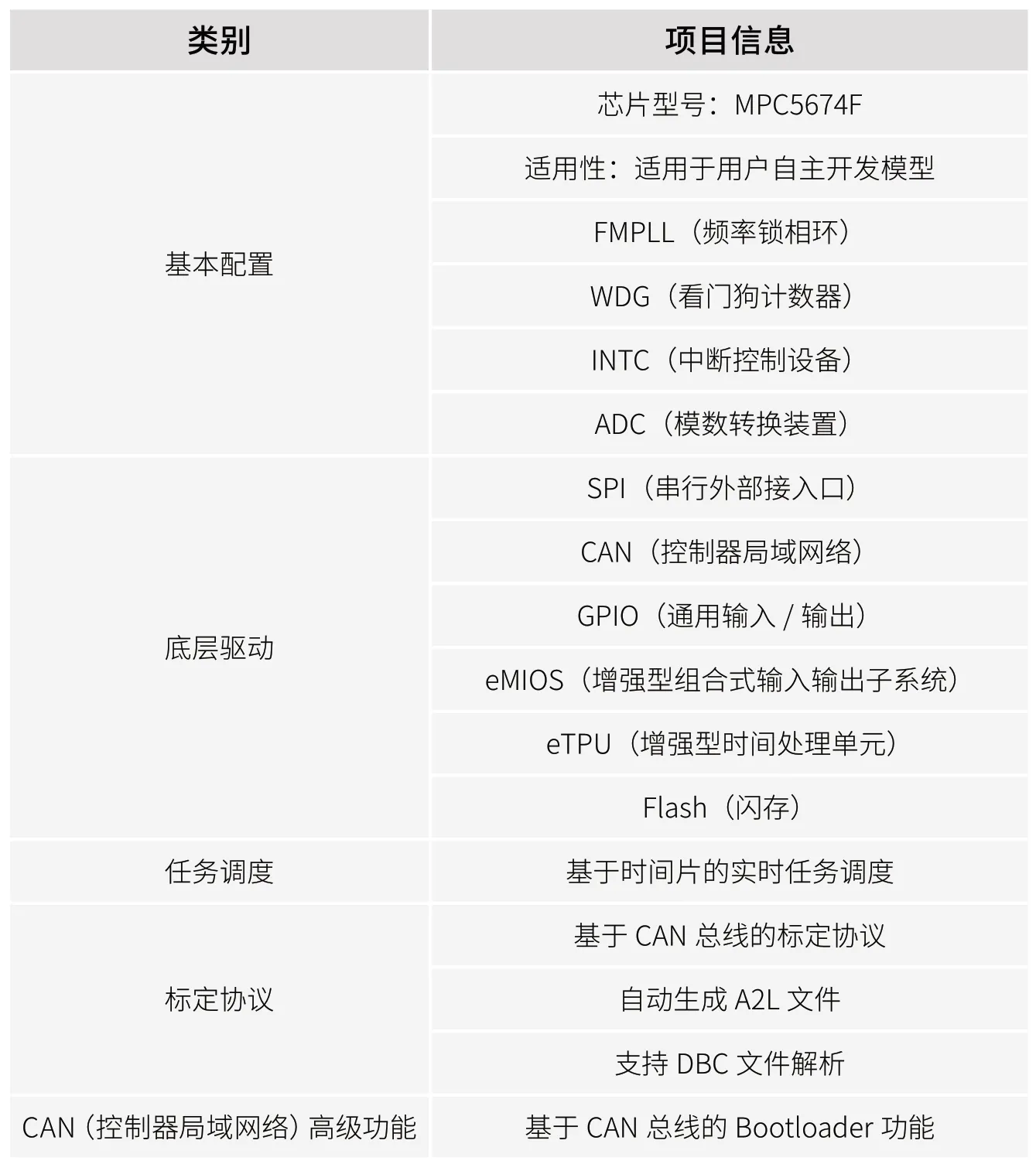
表1 芯片级模型库详细信息

表2 控制器级模型库详细信息
(二)模拟输入
依托ECoCoder 模块库的资源供给,技术人员可以及时、准确地对进入微控制器采集相关信号,进而实现数据信息的拟态输入。例如,技术人员可以基于EoUCoder 提供的ADCInput 模块高效获取模拟输入信息[ADCInput:8(unit16)],进而构建模块与控制算法之间的模型关系,并在此基础上获取基于ADC 模块的特定通道输入值。
(三)控制电磁阀
在完成模拟输入工作后,技术人员需要继续借助ECoCoder 所提供的模块资源,实现对已连接到微控制器的液压执行机构的控制管理。[3]例如,技术人员可基于ECoCoder 中的PWMOut 模块来控制电磁阀。同样地,技术人员也可以在控制算法模型与模块输入保持连接的状态下,利用控制算法模型对接入微控制器eMIOS 模块(增强型输入输出模块)通道的电磁阀的占空比和周期进行有效控制。
(四)控制恒流阀
恒流阀是一种专用的流量调节阀,其核心装置有流量调节装置和自力式压差控制装置,二者是确保系统流量保持恒定的关键。本项目开发设计的电动汽车整车控制器软件接口模块具备智能触发功能,较好地满足了品牌方对震颤控制的要求。同时,该系统还支持技术人员实时调整PWM 频率、震颤电流幅值、震颤频率以及周期等参数。

(五)CAN 报文接收
CAN 报文以CAN 总线为载体,按照CAN 协议实现传输。CAN 报文每帧通常包含7 个部分,分为标准类和扩展类两种格式,二者的主要区别在于标识符(ID)长度差异。本设计中,技术人员利用ECoCoder提供的CANReceive 模块来收发CAN 报文。其中,接收报文的ID 为“0x0002”,数据长度为8 位。
(六)ECUCoder 工具运行条件
ECoCoder 的运行环境对电脑的软、硬件有着一定要求。在硬件方面,无论是台式电脑还是笔记本电脑,都必须配置双核以上的CPU,内存空间不低于1024M,硬盘空间至少为1000M。在软件方面,系统应在 Windows7 及以上,或者为Vista 操作系统(64 位版本)、32 位MATLAB 版本;编译器版本不得低于Code-Warrior2.10。
四、标定及测量软件
MeCa 功能强大,是保障ECU标定及测量质量的重要工具,其可以实时观测、采集并显示ECU的数据参数变化;通过对RAM(随机存取存储器)、Flash 数据进行实时访问、在线标定及修改调整,实现对ECU 代码的快速刷写和实时更新;将测量出的数据输送至上位机以CSV 等数据格式进行保存。本设计中,MeCa 是基于CAN 总线的CCP 标定协议,与汽车级专业CAN 通信接口硬件相匹配,并且支持A2L 标准文件导入。在此基础上,技术人员借助CAN 适配器建立了MeCa 与ECU 的通信路径,并依托CCP 标定协议及与之相对应的A2L 文件,测量标定ECU 的内部变量,最终操控传感器执行数据采集和执行器运作等指令。[4]
五、结语
电动汽车的动力传输和驱动方式有别于传统汽车,因此,其整车控制器的开发设计需要与现代工艺技术和设计理念相融合。本文基于RCP 平台开发的RapidECU 控制器快速原型软件平台,能够实时测量标定汽车ECU 并进行代码刷新,可用于新能源汽车整车控制器的开发和使用。
