电磁式馈能悬架系统的建模及控制策略研究
2023-03-19曹淑瑛胡梦杰郑加驹主雨轩
曹淑瑛,胡梦杰,郑加驹,主雨轩
(1.河北工业大学电气工程学院,省部共建电工装备可靠性与智能化国家重点实验室,天津 300130;2.河北工业大学电气工程学院河北省电磁场与电器可靠性重点实验室,天津 300130)
1 引言
车辆悬架在减轻汽车振动的同时,能产生可观的振动能量。馈能悬架能够在保证车辆具有良好行驶性能的同时,消耗相对较少的能量,因而受到了国内外学者的关注[1−4]。
馈能悬架器件主要有电磁式、液电式、电磁混合式等[1],其中,电磁式因其具有质量轻、响应速度快、执行精度高等优点,得到广泛研究,同时也是液电式、电磁混合式研究的基础。根据是否需要提供动力源,悬架控制可分为主动和半主动控制。
悬架主动控制具有减振性能好但能耗高,而半主动控制可克服主动控制高能耗的缺点,且有望达到与主动控制相近的减振性能,因此,近年来成为研究热点。学者们提出了天棚-地棚混合[5−6]、H∞[7]以及天棚[8−9]等算法的悬架半主动控制系统。然而,文献[5,7−8]中系统没考虑馈能电路的设计,而文献[6,9]仅分别描了系统的减振和馈能特性,未完整揭示系统减振和馈能的控制过程及规律。这里在文献[9−10]基础上,研究了一种电磁式馈能悬架半主动控制系统。建立了悬架机-电双向耦合模型,基于滞环电流控制器和天棚算法设计了馈能减振控制电路,对电流控制器进行了理论和仿真分析,并搭建了控制系统,完整揭示了系统减振和馈能的控制过程及规律。
2 电磁式馈能悬架模型及控制策略
电磁式馈能悬架控制系统,如图1所示。利用天棚算法产生理想电流iref,滞环电流控制器直接控制AC/DC双向变换器,使电机绕组电流ic跟随iref变化,从而产生理想电阻Rref,进而提供理想电阻尼力f1抑制悬架振动。系统中,电机在发电和电动模式之间交替工作,直流蓄电池在充电和放电状态之间交替工作,以实现低能耗的馈能减振控制。

图1 电磁悬架系统模型Fig.1 Model of Electromagnetic Suspension System
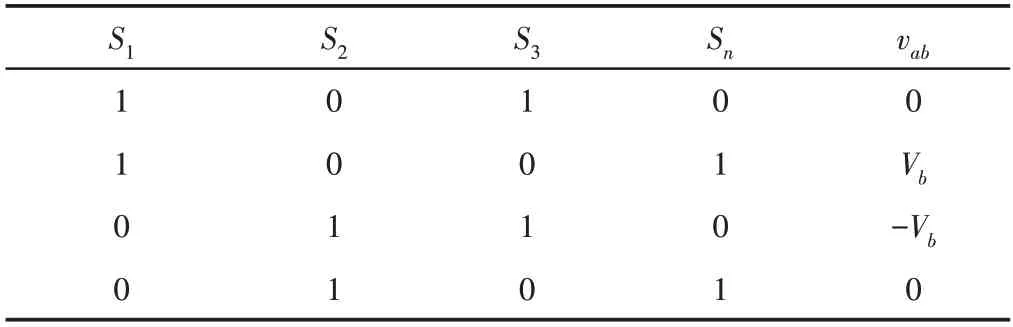
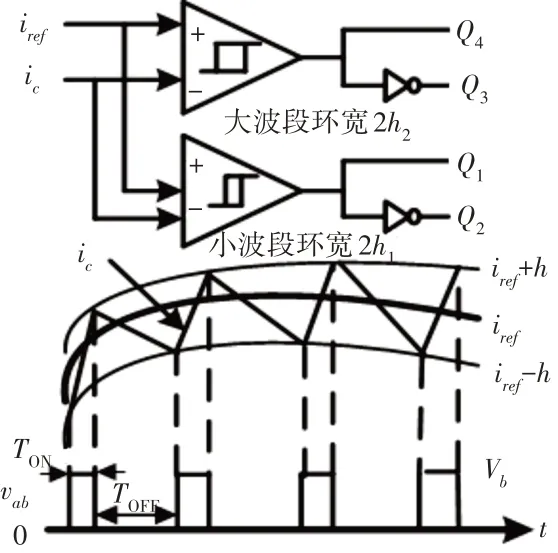
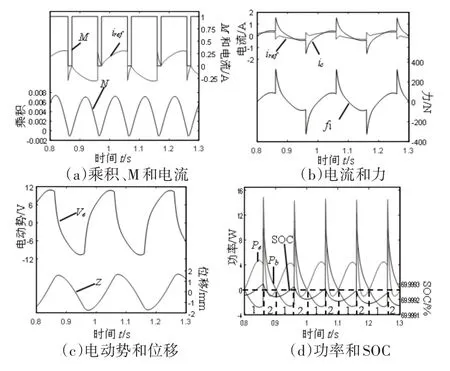
图中:m—簧载质量;k—弹簧刚度;c—粘滞阻尼系数;x—簧载质量位移;y—路面激励位移;z=x-y—悬架相对位移;Jb、l、d=2π/l—丝杠的转动惯量、导程和传递系数;Jg、g—齿轮箱的转动惯量和传动比;Jm—电机转子的转动惯量;Lc、Rc—电机绕组的电感和电阻;2h1、2h2—小波段滞环和大波段滞环的环宽(h1 图1中,电磁馈能器件[9,10]采用滚珠丝杠、齿轮箱、旋转直流电机构成,其将悬架的相对直线运动转化为电机磁场与线圈间的旋转运动,产生电能,同时产生电磁转矩和电阻力,阻碍悬架振动。在位移y作用下,电机感应电动势Ve及悬架动力学方程[9]为: 由式(1)和式(2)可得图2所示的电磁式馈能悬架等效电路模型。图中,力、等效刚度、等效阻尼和等效质量分别类比于电领域中的电流源、电感的倒数、电阻的倒数和电容。显然,调节负载电阻RL,可改变ic,进而改变f1的大小。 图2 电磁式悬架等效电路模型Fig.2 Equivalent Circuit Model of Electromagnetic Suspension AC/DC双向变换器在理想条件下,依据晶体管Q1、Q2、Q3、Q4的开关信号S1、S2、S3、S4的不同,其桥臂中点电压vab会呈现0、Vb和-Vb三种电平,如表1所示。 表1 开关信号和桥臂中点电压的关系Tab.1 Relation Between Switching Signal and Bridge Arm Midpoint Voltage 由图1和图2可知,桥臂中点电压vab: 双波段滞环电流控制[11]原理,如图3所示。图3中,仅给出了vab处于正半周期(即vab≥0)时,Q1导通时间TON和关断时间TOFF的时序。 图3 双波段滞环电流控制原理Fig.3 Principle of Double Band Hysteresis Current Control 式中:TON—图3中Q1的导通时间,其值由式(7)得: 联立式(8)和式(10)可得,可得vab处于正半周期(即vab≥0)时,Q1的开关周期为: 根据变换器的对称操作,vab处于负半周期(即vab≤0)时,Q1导通时间TON和关断时间TOFF的时序与正半周期一样,因此在输出电压vab整个周期内,Q1的开关周期为: 当理想电流iref=10sin(100πt)A、h1=0.125A和h2=0.25A时,变换器的双波段滞环电流控制仿真结果,如图4所示。由图3易知Q2、Q3的开关信号S2、S3分别与S1、S4相反,因此由图4(a)、图4(b)可知,vab≥0正半周期时,Q4导通(Q3关断);vab≤0负半周期时,Q4关断(Q3导通),这表明电压vab周期与Q4和Q3周期相同。 图4 变换器的滞环电流控制仿真结果Fig.4 Simulation Results of Hysteresis Current Control for Converter 此外,图3、图4 表明,vab在正或负半周期连续变化时(图4(a)),误差电流绝对值|Δi|=|iref-ic| 天棚算法的理想模型是在车辆悬架和假想“天棚”之间安装一个用于耗能的阻尼器,当阻尼器的阻尼系数达到一定值时,该方法能控制悬架达到相应的减振效果。但在实际车辆中,不存在假想“天棚”,无法实现理想的控制力。因此,在实际应用天棚算法[4−6,8,9]时,往往利用簧载质量的垂直振动速度进行反馈对悬架进行控制,该方法具有运算简便、响应速度快、鲁棒性强等优点,其缺点为忽略了非簧载质量的振动问题[5]和系统的时延性[8],但其易于地棚[5−6]、含时滞[8]等控制算法和方案相结合,因此在悬架半主动和主动控制系统中具有潜在应用前景。目前,天棚算法往往以改善车辆的平顺性为目的,没考虑系统的馈能特性。这里将天棚算法与馈能减振电路相结合,以揭示系统的减振和馈能特性。 天棚算法是通过一个双态阻尼实现“on-off”开关式控制模式,其输出的理想阻尼力为: 式中:cmax、cmin—最大和最小阻尼系数。 值得指出的是,文献[4−5,8]中,式(13)中的cmin=0。这里式(13)中的阻尼力fsky由可控电阻尼力f1提供,即fsky=f1,其阻尼系数由电阻尼系数c1=ktkeg2d–(2Rc+RL)−1提供。考虑电机在发电和电动模式之间交替工作,因此取cmin=-cmax=-c1。此时,由f1=ktgd–1ic和式(13)可得理想阻尼力为: Huang等[10]对图1中的电磁悬架进行了实验研究,确定了参数:簧载质量m=24kg;丝杠的转动惯量Jb=1.248×10−4kg·m2和导程l=60×10−3m/r;齿轮箱的转动惯量Jg=1.76×10−6kg·m2和传动比g=12:1;电机的转动惯量Jm=1.2×10−5kg·m2、转矩常数kt=0.17Nm/A、电动势系数ke=0.17Vs/rad、电阻Rc=10.2Ω和电感Lc=2.62×10−3H。为了与实验曲线[10]有较好吻合,这里预估的弹簧刚度k=27kN/m和阻尼系数c=160N·s/m。 在Matlab/Simulink中搭建了图2的电路模型,悬架外接可变负载电阻RL可以是纯电阻,也可以是图1 中所示的馈能减振电路,其中天棚算法由式(15)获得,即当N=≥0时检测信号M=1,则控制iref=K3,否则M=0,控制iref=−K3;双滞环控制器中h1=0.175A和h2=0.25A,直流蓄电池模型用容量为6.5Ah、额定电压为6V、初始荷电状态(stage of charge,SOC)为70%的镍氢电池。 令负载电阻RL在20s时间内从10Ω 变化到100Ω,悬架在幅值Y=5mm、频率f=5Hz的位移y=Ysin(2πft)激励下,计算的悬架电阻尼系数、相对位移、电动势和电流,如图5所示。 图5(a)表明,悬架电阻尼系数c1随着负载电阻RL的减小而增大,负载电阻在(0~100)Ω 内能有效的调节c1。随着RL增加和c1减小,对应的电阻尼力f1减小,使悬架的相对位移z增大,结合式(1)可知当相对位移增大时,悬架的电动势Ve增大,电流ic减小,理论分析的结论与图5(b)~图5(d)仿真结果相吻合,这证明了所建悬架模型的正确性。 图5 电磁式悬架的性能曲线Fig.5 Performance Curves of Electromagnetic Suspension 为了有效减振,K3=kegd−(1Rc+Re)−1的虚拟电阻Re取为25Ω,此时悬架控制系统在幅值Y=5mm、频率f=5Hz 的正弦位移y=Ysin(2πft)激励下,计算的曲线,如图6所示。 图6(a)、图6(b)表明,当乘积N=≥0时,检测信号M=1,否则M=0,这使得M呈现了周期性0、1脉冲信号。显然,M在1、0跳变期间,理想电流iref显示了跳变不连续,控制系统产生的电机绕组电流ic和电阻尼力f1=K1ic也呈现了跳变不连续。虽然M在1、0跳变瞬间,ic跟踪iref性能最差,但ic会慢慢跟踪上iref,且在电阻尼力f1=K1ic作用下,悬架相对位移z被控制在(−1.74mm,1.74mm)之间振动,此时,电机电动势Ve约为(−11V,11V),如图6(c)所示。 图6 电磁式悬架控制系统的性能曲线Fig.6 Performance Curves of Electromagnetic Suspension Control System 图6(d)显示了电机输出功率Pe=Veic、电池功率Pb=Vbib和电池SOC随时间的变化,图中1代表充电状态,2代表放电状态。Pb为负时,电池处于充电状态,SOC有上升趋势,其电能来自发电模式下电机输出的正功率Pe;Pb为正时,电池处于放电状态,SOC有下降趋势,其放出的电能供给了电动模式下的电机,电机输出负功率Pe。这些表明,该基于AC/DC变换器的控制系统可实现双向能量流动管理控制。 综上可知,该控制系统在抑制悬架振动的同时,实现了能量的双向流动。 研究了一种基于双向AC/DC变换器的电磁馈能悬架半主动控制系统,对其进行了建模、设计与仿真研究,所得结论如下: (1)所建机-电双向耦合模型可描述悬架电阻尼系数、相对位移、感应电动势和电流随负载电阻变化的合理趋势;(2)所提双波段滞环电流控制能使电流ic跟随理想电流iref,从而合成理想的等效虚拟电阻,产生理想的阻尼力,实现振动的有效控制;(3)所提控制系统能将电机振动发电产生的电能存储,并利用该存储的电能调节电阻尼力抑制悬架振动,显示了自供电减振的潜能。2.1 电磁式悬架建模

2.2 双向变换器的滞环电流控制

2.3 天棚算法
3 仿真结果与分析
3.1 含纯负载电阻的悬架系统性能

3.2 含馈能减振电路的悬架控制系统性能
4 结论
