基于四阵元基站的水下航行器自定位方法
2023-03-15翟京生王晓健钱治文孙万忠
翟京生,王晓健,钱治文,孙万忠,李 杰
基于四阵元基站的水下航行器自定位方法
翟京生1, 2,王晓健1, 2,钱治文1, 2,孙万忠1, 2,李 杰1, 2
(1. 天津大学海洋科学与技术学院,天津 300072;2. 自然资源部海洋观测技术重点实验室,天津 300072)
随着智慧海洋理念的普及和人工智能技术的发展,自主水下机器人、水下滑翔机等水下航行器在海洋科学调查、资源勘测和信息获取方面取得了重大进展,为了满足小型低成本水下航行器智能感知、自主作业的实际需求,同时降低其自主定位成本,设计并实现了一种基于海底四阵元基阵的自定位方法.首先,针对水声信道的复杂性,设计了具有时频特征明显、高峰值功率的声学频率梳信号作为传输信号,仿真实验证明该信号具有可靠的稳定性和抗噪性;其次,结合倒置的超短基线定位原理,设计了布放在已知参考点的四阵元基站,各阵元发出相互正交的声频梳信号,水下航行器在基阵声学作用范围内接收各个阵元混叠的声学频率梳信号,利用匹配滤波法对各信号单程飞行时间进行粗测;最后,针对声学频率梳的时域和频域特性,推导了接收信号与飞行时间的关系,利用相关分析法对各信号单程飞行时间进行精测,进而获取航行器与基站坐标轴阵元的测距和测向结果,结合倒置的超短基线定位方法,实现航行器的位置实时解算.水下实验结果表明,本方法复用率高、可操作性强,水下航行器只需携带单个接收信标即可完成定位计算,进一步降低了成本和系统复杂度.同时,也证明了声频梳信号的高可靠性,可在水下航行器端实现较高的自定位精度.
四阵元基站;水下航行器;倒置超短基线;自定位;声学频率梳
海洋中蕴含着大量的矿产、生物、空间等资源.无论是海洋资源开发、海洋科学认知还是海洋权益维护,都离不开水下航行器的参与[1].精准的定位系统是水下航行器完成这些任务的先决条件.
由于水介质对无线电波具有强烈的吸收效应,因此以卫星导航为代表的无线电定位系统对大多数水下作业都不适用[2].目前,常见的水下定位技术主要包括惯性导航技术、地球物理场导航技术以及水下声学定位技术[3].其中,惯性导航系统辅以多普勒测速仪可为大多数商用航行器提供定位[4],但其定位误差会随时间累积,必须定期进行位置校正;地球物理场导航通过匹配地形、地磁、重力场等特征确定当前位置,有效提高了水下航行器的隐蔽性,前提是需要获取地球物理场的先验信息,该信息易受到环境变化的影响[5].声波是获取水下信息最有效的传播载体,使用廉价的水听器及其阵列是实现水下声学定位的有效方式.
水声定位根据基线长度分为长基线系统(long baseline positioning,LBL)、短基线系统(short baseline positioning,SBL)和超短基线系统(ultrashort baseline positioning,USBL)[6].航行器通过长基线可以得到最精确的定位结果,但其需要获取3个以上布放在海底且相距较远信标的声学信息,操作复杂且成本高昂.传统的短基线和超短基线将水声阵列布放到航行器上,很大程度上降低了定位成本,简化了系统结构[7],但为每个航行器配备超短基线系统显然不能满足低成本的智能定位与组网的要求.
Vickery[8]提出水声定位系统的发展趋势将是传统系统的倒置,并首次提出倒置超短基线的概念,使得信噪比得到一定改善进而允许更长的声学跟踪范围.Jakuba等[9]对基于单向传播时间的倒置超短基线系统进行了可行性分析,结果表明使用该系统的深海滑翔机可以获取更多的近底数据和更好的定位精度.Fischell等[10]首次实现了上述系统,证明了倒置超短基线的有效性,并进一步对该系统精度进行了评估,实验结果表明该系统可以为微型低成本水下机器人提供高精度低功耗的导航解决方案.Sun等[11]基于主从式无人水下机器人集群提出了一种基于倒置超短基线的定位系统,降低了结构复杂性,同时具有更多的用户容量以及更广的工作范畴.
为进一步满足低成本水下航行器的定位需求,本文基于海底多元基阵,实现了一种新的倒置超短基线自定位方法,该方法允许水下航行器携带较少的声学设备,在低功耗、低成本的前提下实现自主定位.在海底多元基阵的信号覆盖范围内,水下航行器利用匹配滤波器检测所接收的信号中来自各阵元广播的混叠信号,得到各个阵元信号的飞行时间信息以实现距离粗测;然后,利用设计的广播信号特性和相关分析法在一个脉冲相关周期内对距离进行精测;最后,结合倒置超短基线定位原理,实现水下航行器自主定位功能.
为进一步提高声学定位系统的精度,本文设计了高度可检测的声学脉冲信号.借鉴飞秒光学的研究成果,诺贝尔奖获得者Hall[12]和Hänsch[13]发明了一种具有脉冲宽度窄、峰值功率高、重复频率稳定等特点的光学频率梳信号,被广泛应用于与绝对距离测量相关的卫星编队飞行、行星空间定位、深空探测等领域[14].在前期工作中,本团队类比光频梳,首次在水下产生了稳定的声频梳信号,并在水下距离测量中达到了微米级别的性能[15],实现了高精度水下测距实验.在此基础上,本文为每个阵元设计了具有独特时频特性且相互正交的声学频率梳信号,并首次将其运用到水下定位领域.大量仿真结果表明多路声频梳信号的频率稳定性和高抗噪性,水池实验表明本方法利用高可检测性的多路声频梳信号能够实现对水下航行器位置的高精度自主估计.
1 基于海底四元基阵的定位原理
本节介绍基于海底四元基阵的水下航行器自定位原理,图1所示为该系统示意图.假设四元基阵布放在已知位置(可通过水面声学定位或惯导实现)[16],每个阵元周期性发射各自特征的声频梳广播信号,水下航行器与基阵时间同步,并使用单个水听器捕获4路混叠广播信号,通过匹配滤波得到各信号的单程飞行时间,利用声频梳特性获得指向基阵的方位角,进而解算与基阵的相对位置,通过超短基线定位原理和基阵绝对位置,可得到航行器自身的绝对位置,实现实时自定位功能.
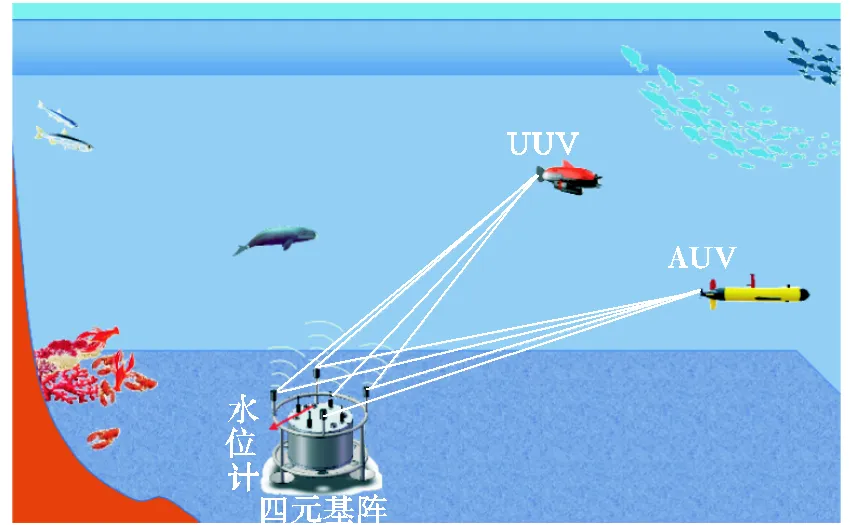
图1 海底四元基阵定位系统
1.1 系统硬件组成
1.1.1 四元基阵部分
如图2所示,海底多元基阵包括电源部分、工控机部分和信号发射部分.工控机每秒控制4声卡发射预先存储的声频梳信号,经放大电路后由4个WBT45换能器发出.
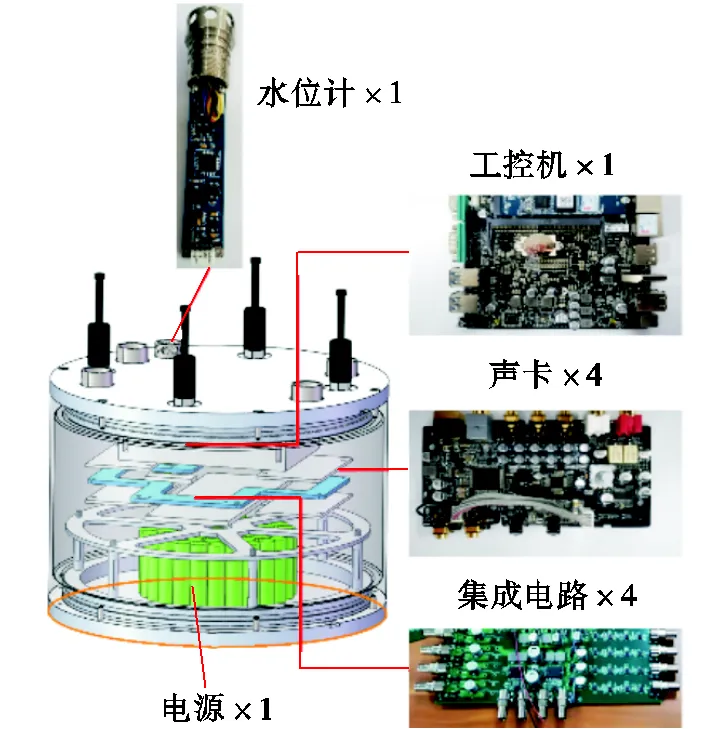
图2 海底四元基阵部分硬件组成
1.1.2 水下航行器部分
水下航行器配置单个水听器,在到达基阵工作范围后接收信号,并传输至工控机模块进行数据处理,其硬件组成如图3所示.
1.2 声频梳信号设计
光频梳是一种特殊的飞秒激光光源(即脉冲宽度为飞秒量级),在时间域为脉冲信号,在频率域为等频率间隔分布的光频率梳齿,在其他物理量的精密测量中有着重要应用.在前期工作中,笔者类比光频梳,描述了一种基于水声换能器的声频梳的产生方法,可生成完全稳定的声频梳信号[15],在宽频段内各个频率成分可精确锁定到参考频率上,进而实现高峰值功率的时域信号.且其参数(脉冲重复频率和偏差频率)可灵活调整,方便实现正交信号设计.
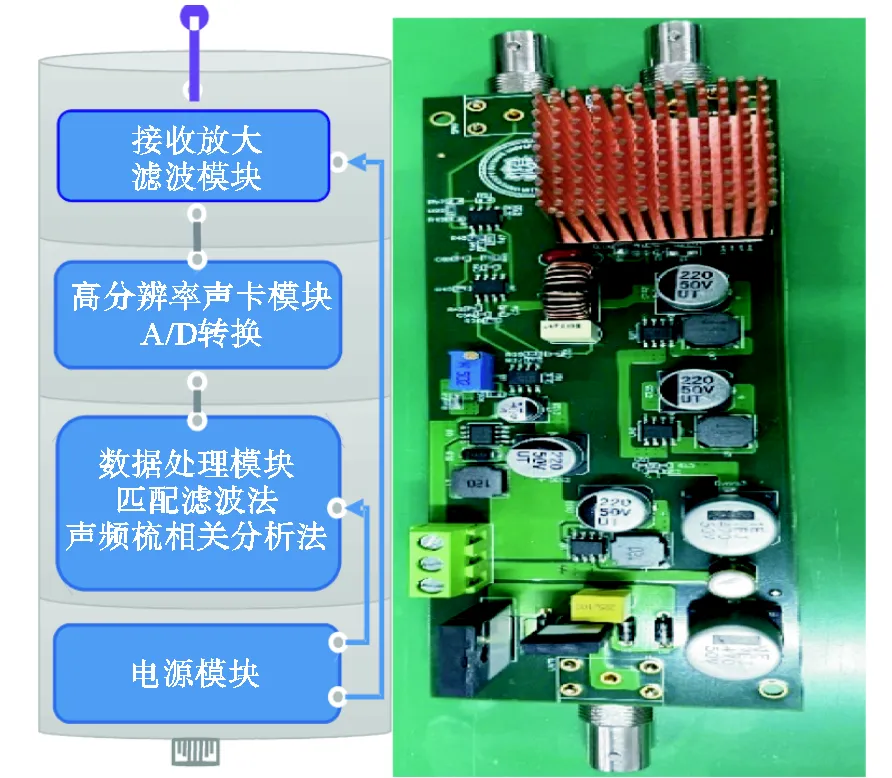
图3 水下航行器自定位部分硬件组成
在此基础上,本自定位系统产生了4路正交的声频梳信号作为海底四元基阵的广播信号,以提高脉冲信号的信噪比和系统的定位精度.这里,每路声频梳信号为一组声信号的相干和,数学表达式为


笔者使用杭州应用声学研究所研发的WBT45换能器,它的工作频率范围为30~60kHz,选取4段带宽相同且互不重叠的频率带,分别设置rep[i]和ceo[i],为了保证广播信号的正交性,4路声频梳信号的重复频率要互异,保证其在频率特性的高检测性.

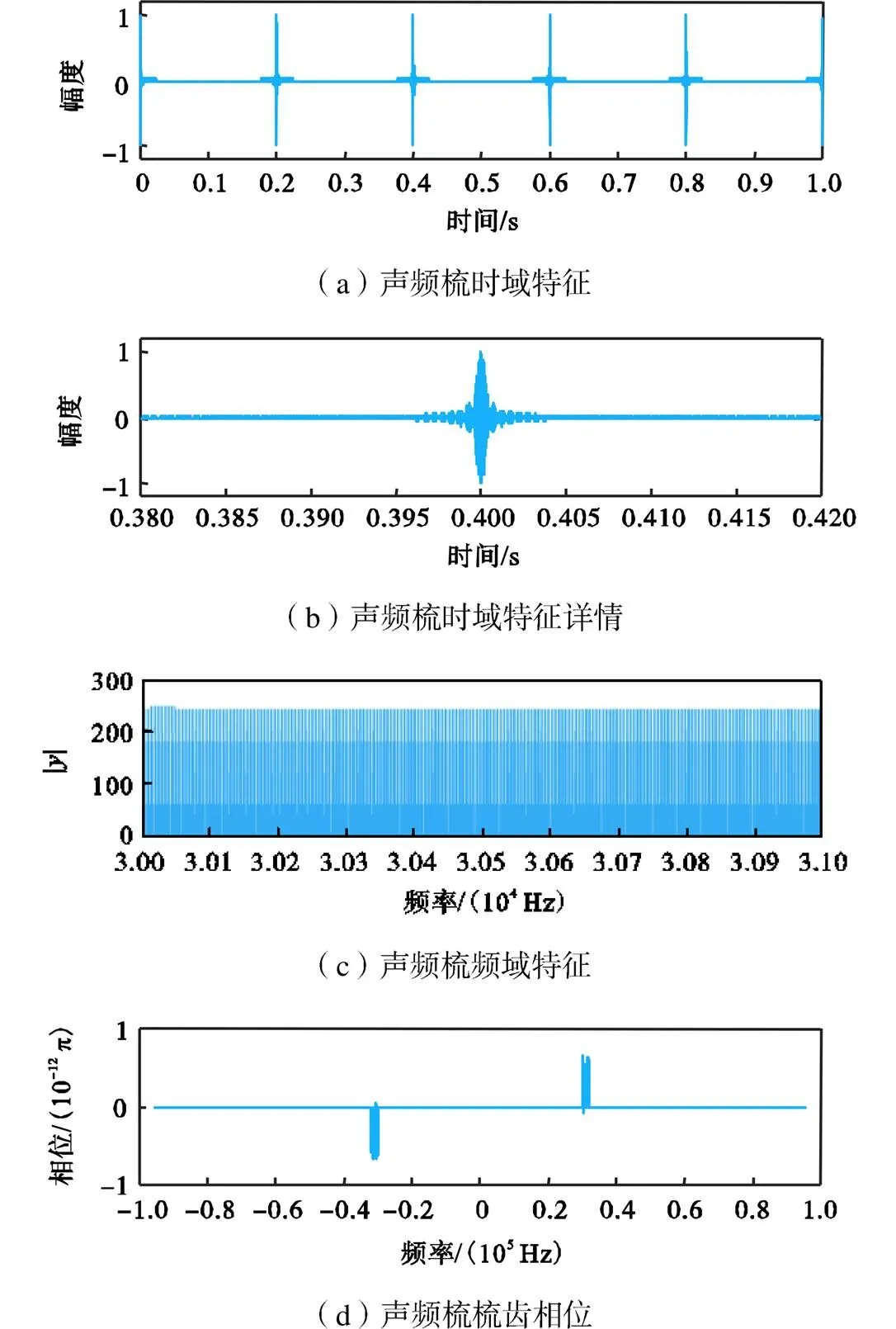
图4 频带为30~32kHz、frep为5Hz、fceo为30kHz、φ0为0时的声频梳信号
按照表1所示参数,产生4路正交的声频梳信号并将其存储在多元基阵的工控机,定期广播.
表1 4路正交声频梳信号参数
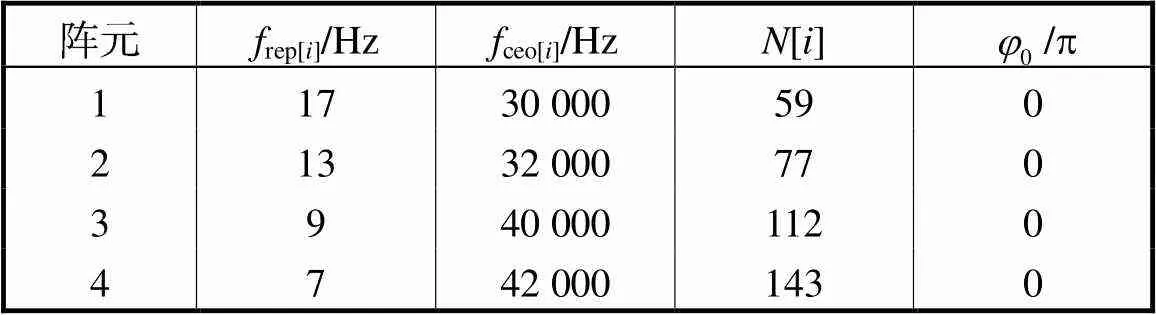
Tab.1 Quadruple orthogonal acoustic frequency comb signal parameters
1.3 匹配滤波


式中s为水下航行器的ADC采样频率.
1.4 相关分析法
类比光频梳基于时间飞行法和相关分析法的测量原理[17],提出声频梳的高分辨率绝对距离测量方法.由式(4)可以得到4路声频梳的飞行时间,可对基阵各阵元到水下航行器的距离进行粗测,再利用相关分析法在一个声频梳脉冲周期内进行距离精测.
海底多元基阵周期性广播如式(1)所表示的声频梳信号,则其到达水下航行器接收端时可以表达为


1.5 定位方法

式中

式中:和分别表示航行器接收到的来自x轴上两阵元的应答信号的时间差以及来自y轴上两阵元的应答信号的时间差;2d为同轴阵元的间距.
水下航行器接收信号过程中具有系统时延,会影响飞行时间测量.因此在系统定位作业前使水听器与海底基阵端换能器紧挨,记录接收时延,将其用于后续的定位解算过程来消除系统误差.
1.6 声频梳信号仿真分析
水下噪声环境复杂,会对时延估计产生影响从而导致定位误差,需研究声频梳信号的抗噪性.取图4中信号为参考信号,为其添加固定时延以及不同信噪比的噪声作为接收信号,分别与参考信号做匹配滤波,得到时延估计,图6给出不同信噪比下做1000次蒙特卡洛仿真后的时延估计结果.可看出,信噪比越高时延估计误差越小,精度越高,在信噪比大于 -24dB时,声频梳信号的时延估计误差小于3μs,可以认为其有很可靠的时延估计结果,说明声频梳信号具有极好的抗噪性和高检测性.
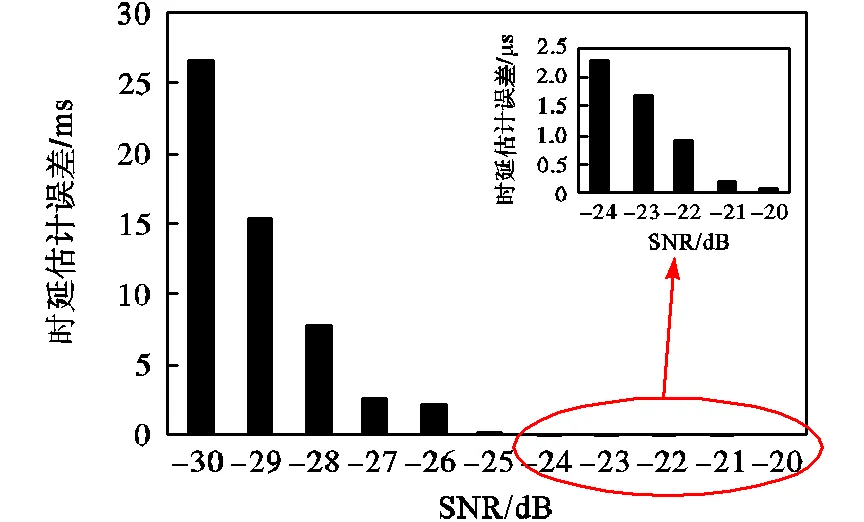
图6 不同信噪比下声频梳信号时延估计误差仿真结果
2 实验和结果
为了验证基于声频梳信号的多元基阵水下航行器自定位方法,笔者在国家海洋技术中心实验水池搭建了图7所示的实验平台,平台主要包括周期性发射声频梳信号的多元基阵和同步接收信号的水下航行器单个水听器.多元基阵使用第1.1.1节介绍的硬件设备;水听器(B&K 8104)将接收到的水声信号转换为电信号经放大(B&K 2692)和滤波后,传输至示波器、频谱仪和处理器来进行信号的分析和解算;利用一个铷原子钟(Microsemi 8040C)实现声频梳的频率参考以及收发两端的时间同步.
实验时,发射单元的多元基阵和接收单元的水听器分别布放在消声水池的水下7m和4m处,且处在基阵轴正上方,与基阵原点的水平距离为7m,基阵阵元间隔2为40cm,水听器接收端采样率s设为500kHz.
在定位实验过程中,多元基阵每个阵元周期性地广播声频梳信号,各声频梳信号的信息由表1给出,参数不同且相互正交;水听器端与基阵端保持同步,基阵每发射一次信号都同步触发水听器端的一次信号采集,水听器将采集到的信号传输至处理器,处理器根据上述定位原理对声信号进行处理完成一次定位解算.
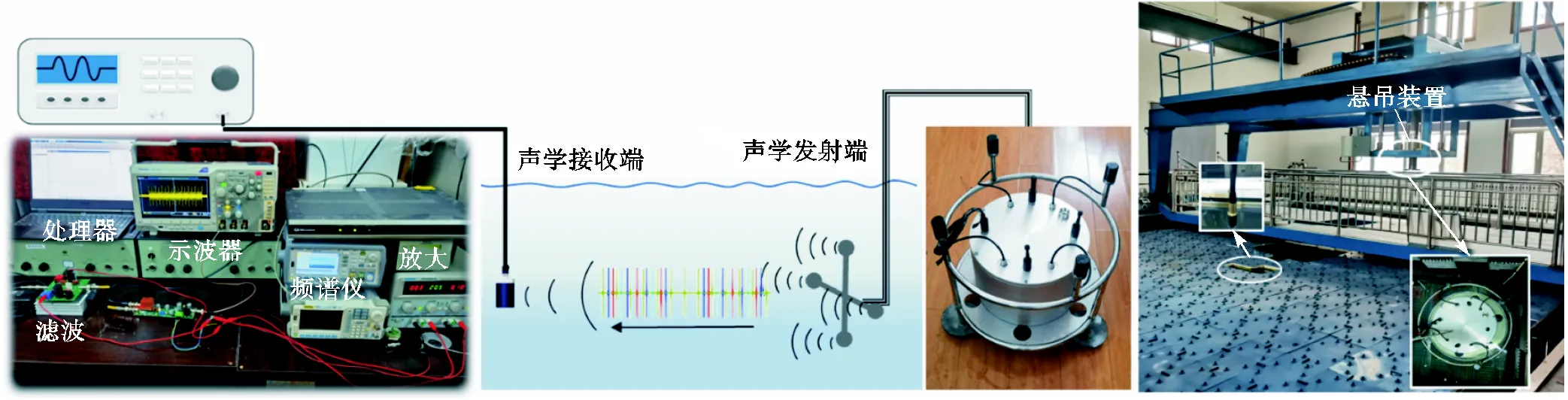
图7 实验系统结构
图8(a)和图8(b)为一次定位过程中的多元基阵发射信号和水听器接收信号在时域上的对比图,发射端的4路声频梳组成一个混叠信号,用不同颜色区分;接收信号包含了4路声频梳以及水下噪声,其频谱如图8(c)所示.
声频梳经过传输到达接收端后,4路声频梳信号的相位发生变化,其相频特性如图9(a)所示,可见在4路声频梳的频率范围内相位呈规律性变化,平移相位角后得到图9(b),发现频率和相位呈线性相关,符合前期对声频梳信号相关分析的结果,可以利用相位与频率之比完成基于声频梳的定位解算.
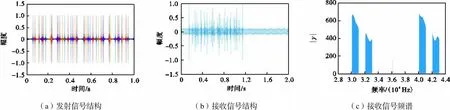
(a)发射信号结构(b)接收信号结构(c)接收信号频谱
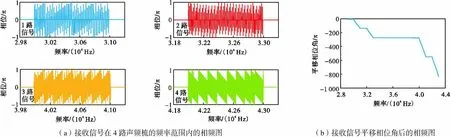
(a)接收信号在4路声频梳的频率范围内的相频图(b)接收信号平移相位角后的相频图
对接收信号进行参数(时域、频域、相位)分析初步验证声频梳信号的性能后,将水听器端的接收信号依次与原4路声频梳信号进行匹配滤波,图10给出了匹配滤波结果,可以看到4路信号的滤波结果分布特征明显,都可以快速找到峰值点,即时间偏移量,进而粗测各信号的飞行时间,滤波结果分布特征明显也说明声频梳信号与水声噪声的相关性很小,具有很好的可检测性能.
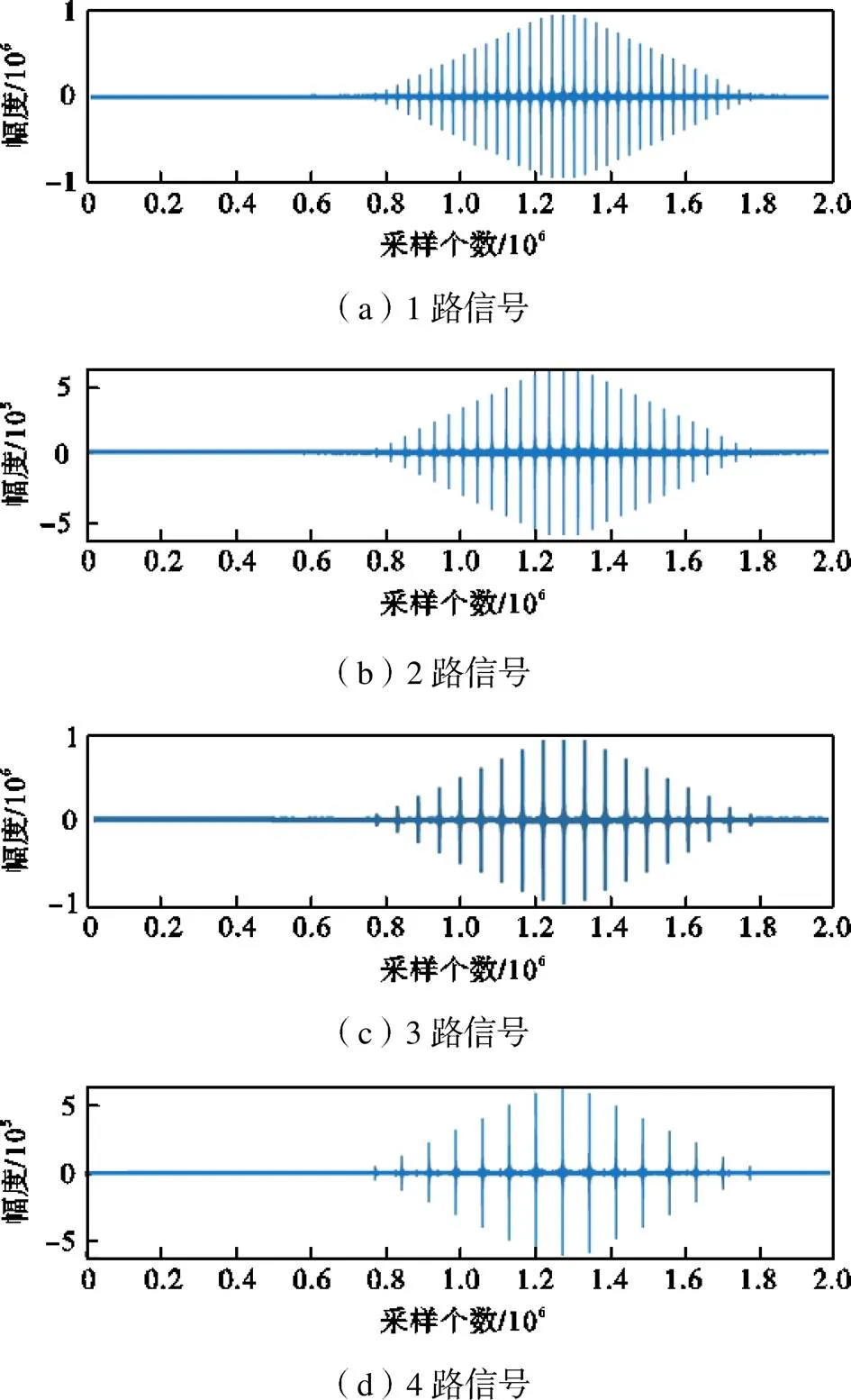
图10 接收信号与4路声频梳信号匹配滤波的结果

表2 定位误差统计结果
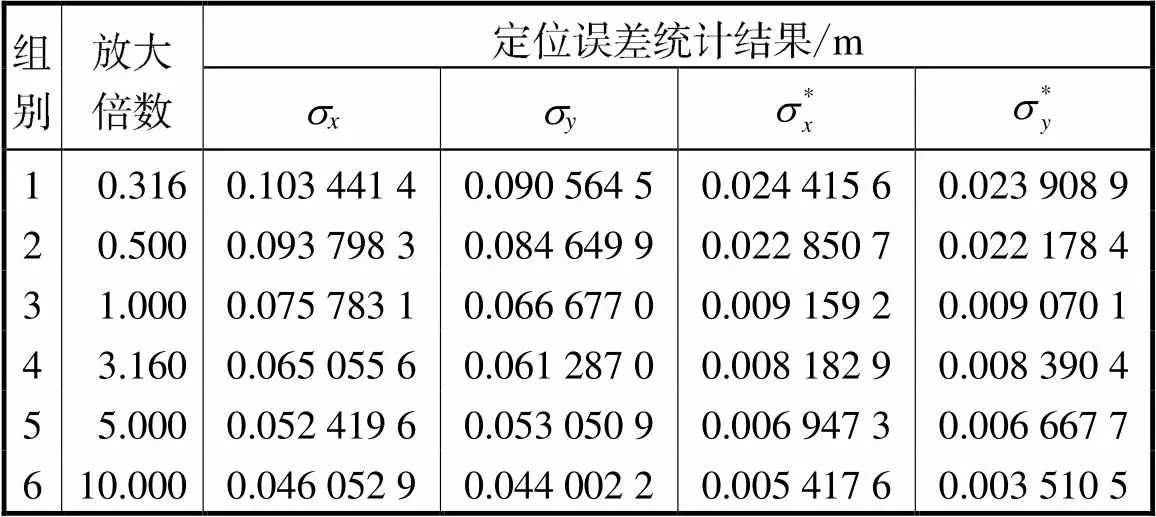
Tab.2 Statistical results of the positioning errors
通过上述统计结果可以发现,当放大倍数越高即信号功率变大信噪比增强的时候,定位误差越小,且与传统的匹配滤波时延估计法相比,声频梳信号的相关分析可以很大程度上提升定位精度,声频梳信号在水下定位上体现出了良好的工作性能.

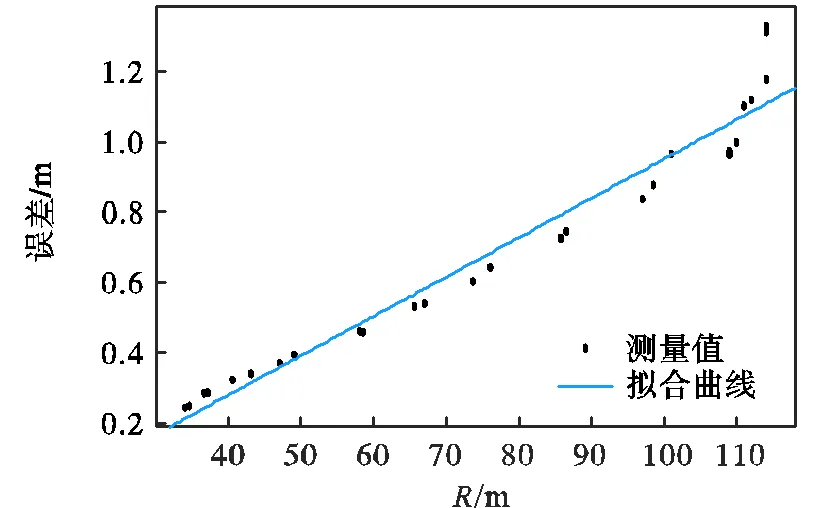
图11 系统定位误差与定位距离的关系
3 结 语
水下航行器在水文信息收集、海底资源开发、水下防御等方面起到重要作用,为了满足水下航行器低成本、智能化自主定位的需求,本文提出了一种基于海底四元基阵的水下航行器自主定位方法.在该系统中,水下基阵各阵元周期性地广播具有明显时频特征和高抗噪性的声频梳脉冲信号;然后,水下航行器接收、分解4路混叠信号,并利用匹配滤波和相关分析法提取各路信号的时延信息;最后,结合超短基线定位原理,进行水下航行器单水听器配置下的低成本定位解算.实验结果表明声频梳信号能进一步提高水下定位精度.在实际工程使用时可以根据定位需求沿航线部署少量的四元基阵,既可以提高有效定位距离,还可以获取冗余信息以减小定位误差.今后,可在不改变声频梳信号的时频特性的情况下,在广播信号中加入编码信息,为实现水下通信-定位一体化设计提供新思路.
[1] Liu Zhixiang,Zhang Youmin,Yu Xiang,et al. Unmanned surface vehicles:An overview of developments and challenges[J]. Annual Reviews in Control,2016,41:71-93.
[2] 黄玉龙,张勇刚,赵玉新. 自主水下航行器导航方法综述[J]. 水下无人系统学报,2019,27(3):232-253.
Huang Yulong,Zhang Yonggang,Zhao Yuxin. Review of autonomous undersea vehicle navigation methods[J]. Journal of Unmanned Undersea Systems,2019,27(3):232-253(in Chinese).
[3] Brummelen J V,O’Brien M,Gruyer D,et al. Autonomous vehicle perception:The technology of today and tomorrow[J]. Transportation Research Part C:Emerging Technologies,2018,89:384-406.
[4] Zhu Bing,He Hongyang. Integrated navigation for doppler velocity log aided strapdown inertial navigation system based on robust IMM algorithm[J]. Optik,2020,217(9):164871.
[5] Melo J,Matos A. Survey on advances on terrain based navigation for autonomous underwater vehicles[J]. Ocean Engineering,2017,139:250-264.
[6] 孙大军,郑翠娥. 水声导航、定位技术发展趋势探讨[J]. 海洋技术学报,2015,34(3):64-68.
Sun Dajun,Zheng Cui’e. Study on the development trend of underwater acoustic navigation and positioning technologies[J]. Journal of Ocean Technology,2015,34(3):64-68(in Chinese).
[7] 邵 祺,常 帅,付晓梅. 基于单水声信标距离量测的匹配定位方法[J]. 海洋通报,2019,38(1):53-62.
Shao Qi,Chang Shuai,Fu Xiaomei. Matching localization method based on distance measurement of single acoustic beacon[J]. Marine Science Bulletin,2019,38(1):53-62(in Chinese).
[8] Vickery K. Acoustic positioning systems. New concepts-the future[C]// Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles. Cambridge,USA,1998:103-110.
[9] Jakuba M,Kinsey J,Partan J,et al. Feasibility of low-power one-way travel-time inverted ultra-short baseline navigation[C]// OCEANS 2015 MTS. Washington,USA,2015:1-10.
[10] Fischell E,Rypkema N,Schmidt H. Relative autonomy and navigation for command and control of low-cost autonomous underwater vehicles[J]. IEEE Robotics and Automation Letters,2019,4(2):1800-1806.
[11] Sun Dajun,Gu Jia,Han Yunfeng,et al. Inverted ultra-short baseline signal design for multi-AUV navigation [J]. Applied Acoustics,2019,150:5-13.
[12] Hall J L. Nobel lecture:Defining and measuring optical frequencies[J]. Review of Modern Physics,2006,78(4):1279-1295.
[13] Hänsch T W. Nobel lecture:Passion for precision[J]. Review of Modern Physics,2006,78(4):1297-1309.
[14] Ye Jun. Absolute measurement of a long,arbitrary distance to less than an optical fringe[J]. Optics Letters,2004,29(10):1153-1155.
[15] Wu Hanzhong,Qian Zhiwen,Zhang Haoyun,et al. Precise underwater distance measurement by dual acoustic frequency combs[J]. Annalen der Physik,2019,531(9):1900283-1-1900283-8.
[16]卢 军,肖昌美,宋保维. 基于移动长基线的水下航行器定位和跟踪技术研究[J]. 兵工学报,2015,36(增2):133-138.
Lu Jun,Xiao Changmei,Song Baowei. Study of positioning and tracking based on moving long baseline for underwater vehicles[J]. Acta Armamentarii,2015,36(Suppl 2):133-138(in Chinese).
[17]吴学健,李 岩,尉昊赟,等. 飞秒光学频率梳在精密测量中的应用[J]. 激光与光电子学进展,2012,49(3):1-10.
Wu Xuejian,Li Yan,Wei Haoyu,et al. Femtosecond optical frequency combs for precision measurement applications[J]. Laser & Optoelectronics Progress,2012,49 (3):1-10(in Chinese).
[18] Joo K,Kim S. Absolute distance measurement by dispersive interferometry using a femtosecond pulse laser[J]. Optics Express,2006,14(13):5954-5960.
Self-Positioning Method for Underwater Vehicles Based on Subsea Four-Element Array
Zhai Jingsheng1, 2,Wang Xiaojian1, 2,Qian Zhiwen1, 2,Sun Wanzhong1, 2,Li Jie1, 2
(1. School of Marine Science and Technology,Tianjin University,Tianjin 300072,China;2. Laboratory of Ocean Observation Technology,Ministry of Nature Resources,Tianjin 300072,China)
With the advancement of smart ocean technologies and artificial intelligence,underwater vehicles (UVs),such as gliders,have made remarkable progress in marine scientific investigation,resource survey and information acquisition. To meet the needs for intelligent sensing of small and low-cost UVs and reduce positioning costs,this study implemented a self-positioning method based on a subsea four-element array. An acoustic frequency comb(AFC)with unique time-frequency characteristics and high peak power as the transmission signal was designed for the complexity of a hydroacoustic channel. The simulation results proved that AFC has reliable stability and noise immunity. Next,Combined with the principle of inverted ultra-short baseline positioning,an array placed at a reference point was developed,with elements emitting orthogonal AFCs. UVs received signals within the operating range of the array and utilized matched filtering to obtain an approximate measurement of the one-way flight time(OWFT)for each AFC. Finally,the relationship between the received signal and the OWFT for the time-frequency characteristics of each AFC was determined,correlation analysis was utilized to accurately measure the OWFT,then the range and direction measurements with each beacon element were obtained,and positioning was determined based on the principle of inverted ultrashort baseline. The results of underwater experiments showed that this method is reusable and operable,and UVs only need a single receiving beacon to complete localization,which reduces the cost and system complexity. Thus,this study shows the reliability of AFC,which can achieve high self-positioning accuracy on the UV side.
four-element array;underwater vehicle;inverted ultrashort baseline;self-positioning;acoustic frequency comb
10.11784/tdxbz202112015
TB56
A
0493-2137(2023)03-0252-08
2021-12-10;
2022-03-04.
翟京生(1959— ),男,博士,教授,jingsheng@tju.edu.cn.
钱治文,zhiwenqian@tju.edu.cn.
国家重点基础研究发展计划(973计划)资助项目(2016YFC1401203);国家自然科学基金资助项目(42006168,11404079).
Supported by the National Key Basic Research Program of China(No. 2016YFC1401203),the National Natural Science Foundation of China (No.42006168,No. 11404079).
(责任编辑:王晓燕)