基于灰狼算法的矿用自卸车油气悬架半主动控制
2023-03-11汪若尘丁仁凯陈轶杰
孙 东 汪若尘 丁仁凯 陈轶杰
1.江苏大学汽车与交通工程学院,镇江,212013 2.江苏大学汽车工程研究院,镇江,2120133.中国北方车辆研究所,北京,224144
0 引言
矿用自卸车行驶条件恶劣、载重强度大,工作时会产生较大的车身加速度和轮胎动载荷,前者加剧驾驶疲劳,后者破坏道路环境,从而引发安全事故[1-4]。拥有变刚度特性和承载密度大的油气悬架被广泛应用于矿用自卸车,以改善车辆的动力学性能,但传统的被动油气悬架无法兼顾矿用自卸车乘坐舒适性和道路友好性,为此,学者针对油气悬架的智能控制展开了广泛研究[5-9]。
SAGLAM等[10-11]为主动油气悬架设计了一个状态依赖Riccati方程(SDRE)控制器,基于系统灵敏度分析,确定了控制器的固定权重和自适应权重系数,仿真结果表明,通过实时调整自适应系数,车辆的乘坐舒适性和车身姿态得到明显改善。FENG等[12]设计了一种分层控制器,其中,上层为模糊PID控制策略,用于输出主动控制力;下层为油气悬架非线性数学模型,用于计算上层控制力所需油液流量。REN等[13]提出了一种基于状态观测器的滑模控制器,其中,无迹卡尔曼滤波器估计悬架状态,混合天棚-地棚参考模型估计滑模控制器的轨迹,仿真结果证明,该控制系统能够使车辆兼顾行驶平顺性和操纵稳定性。YANG等[14]将流体惯性质量引入油气悬架系统中,获得了理想的阻尼效果,并设计了模型预测控制策略,试验结果表明,悬架的低频振动得到明显抑制,车辆平顺性得到改善,同时,控制策略降低了液压控制阀的使用率,提高了系统的可靠性。
上述分析表明,对油气悬架进行智能控制是解决矿用自卸车乘坐舒适性和道路友好性矛盾关系的有效途径。当前研究更多地关注智能控制策略的设计,如滑模控制、模型预测控制和线性二次高斯(linear quadratic Gaussian,LQG)控制等,这些控制方法在协调悬架系统动力学性能方面工作效果较好,但对系统数学模型的精度要求很高,而油气悬架的强非线性使得数学模型与实际系统之间存在差异,故上述策略在实际应用时表现并不理想。此外,鲜有设计智能油气悬架执行器动作方案的文献报道。
针对上述问题,本文设计了一种新型可控阻尼阀式半主动油气悬架系统,以可控阻尼阀作为控制算法的执行器,并明确了阻尼阀控制方案;采用灰狼算法对改进天棚控制器中关键控制参数进行优化,旨在兼顾矿用自卸车的乘坐舒适性和道路友好性。
1 油气半主动悬架系统建模
1.1 油气悬架AMESim物理模型
油气弹簧是一种复杂的液压组件,如图1所示,很难用数学模型精确描述油气悬架的动力学特性,故本文采用AMESim仿真软件建立油气悬架的物理模型,如图2所示。AMESim建模的关键点有两个:一是推导模拟气体部分的蓄能器模块(HA000-1)关键参数计算公式;二是添加摩擦力模块(BRFS01-1)以反映真实油气弹簧的阻尼特性。
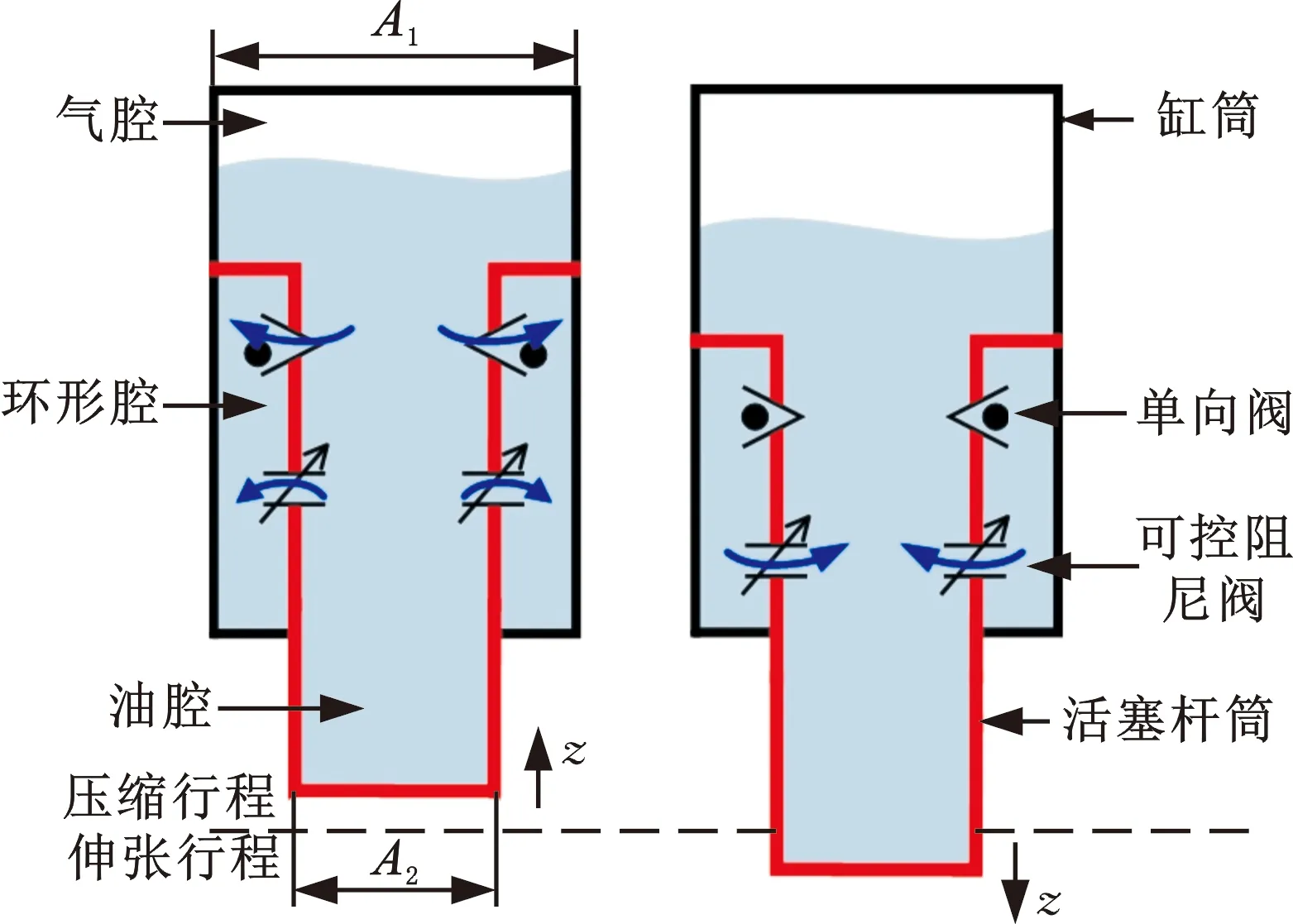
图1 半主动油气弹簧结构示意图Fig.1 Structural diagram of semi-active hydro-pneumatic spring

图2 油气悬架AMESim物理模型Fig.2 Physical model of suspension system in AMESim
蓄能器模块关键建模参数为初始压力、预充气压力和蓄能器体积,其中,初始压力
(1)
式中,ms为油气悬架簧载质量;g为重力加速度;A2为活塞杆筒有效作用面积。
蓄能器初始充气高度并不等于充气位移,要考虑活塞杆筒移动造成的油液流动,故初始充气高度
(2)
式中,Hch为充气位移;A1为缸筒有效作用面积。
同理,预充气高度为
(3)
式中,Ssus为充气过程油气弹簧活塞杆筒总行程。
则蓄能器体积为
Vaccu=HpreA1
(4)
预充气压力ppre根据理想气体状态方程求得:
(5)
式中,γ为绝热系数;Vini为初始蓄能器体积。
由上可知,当簧载质量不变时,初始压力和蓄能器体积固定不变,则改变充气位移只会间接改变蓄能器预充气压力。
活塞杆筒与缸筒内壁及密封部件相对运动时产生的摩擦力虽然在数值上只占油气弹簧输出力的一部分,但它直接影响弹簧输出力在活塞杆筒运动换向瞬间的形状,因此,摩擦力不可忽略。当前文献鲜有考虑摩擦力对油气弹簧输出力形状的影响,在AMESim建模中也未添加摩擦力模块。本文选择sealing friction元件模拟油气弹簧摩擦力,具体数值采用试验法确定。
为验证本文所建立的油气悬架AMESim物理模型的精确性,对试制的油气弹簧样机进行力学特性试验,台架布置如图3所示,试验工况为振幅20 mm、频率1 Hz的正弦激励。

图3 油气弹簧力学试验台架布置Fig.3 Bench layout of characteristic test
试验结果如图4所示,本文所建模型与试验数据吻合度较高,且反映了活塞杆筒运动方向变化时(即曲线极值点处)油气弹簧输出力发生突变这一特性,为下文实现半主动控制奠定模型基础。

图4 油气弹簧特性曲线对比结果Fig.4 Comparative results of characteristic test
1.2 可控阻尼阀力学模型
本文采用可控阻尼阀作为悬架系统执行器,通过调节阻尼阀水力直径来改变油气弹簧输出阻尼力,进而实现油气悬架半主动控制。可控阻尼阀提供的阻尼力可由下式计算:
(6)
式中,Fva为可控阻尼阀提供的阻尼力;Δp为通过阻尼阀的油液压降;Aring为环形腔有效面积,Aring=A1-A2;v为油气弹簧两端相对速度;Q为通过阻尼阀的油液流量。
经仿真验证,阻尼力仅与阀口水力直径、环形腔有效面积以及油气弹簧两端相对速度有关。当环形腔有效面积一定时,阻尼阀提供的阻尼力可描述为关于阀口直径和相对速度的非线性函数:
(7)
式中,Uva为阻尼阀驱动电压;ai、bi、ci和di为待辨识参数。
根据试验数据,利用MATLAB的Curve Fitting工具箱对式(7)进行参数辨识,图5为可控阻尼阀速度特性曲线拟合效果图,可以看出,式(7)曲线与实验数据吻合度很高,说明本文提出的多项式模型能精确描述可控阻尼阀的力学特性。

图5 可控阻尼阀速度特性曲线拟合效果Fig.5 Speed characteristics fitting results of controllable damping valve
2 悬架半主动控制算法设计
2.1 改进天棚控制策略
天棚控制策略无需获取悬架系统数学模型[15],具有较强的工程实践性,适合本文建立的半主动油气悬架物理模型。同时,为兼顾矿用自卸车行驶时的乘坐舒适性和道路友好性,本文采用改进天棚控制策略,并考虑了执行器饱和输出特性和油气弹簧摩擦力对半主动控制的影响,控制框图见图6,天棚控制律表述为
(8)


图6 半主动油气悬架控制框图Fig.6 Control scheme diagram of semi-active hydro-pneumatic suspension system
2.2 控制参数优化
改进天棚控制策略中的两个关键控制参数(天棚阻尼系数和被动阻尼系数)对悬架综合性能的控制效果影响较大,故需进行参数优化。矿用自卸车常用行驶工况为低速颠簸路面,过大的车身加速度会加剧驾驶者的作业疲劳,因此,控制参数优化的主要目标是改善矿用自卸车的行驶平顺性。选取矿用自卸车满载状态以30 km/h行驶在D级随机路面上的车身加速度均方根值作为适应度函数,适应度值越小,行驶平顺性越好。此外,还需对悬架动挠度和轮胎动载荷这两个悬架动力学性能评价指标加以约束。根据“3σ规则”,约束悬架动挠度均方根值不超过悬架最大压缩行程限定值的1/3,防止悬架频繁撞击到缓冲块影响驾驶者乘坐舒适性和油气弹簧使用寿命。矿用自卸车满载质量很大,过高的轮胎动载荷会严重破坏行驶路面,为了保证一定的道路友好性,约束轮胎动载荷均方根值小于车辆静载的1/3,防止轮胎跳离地面破坏道路。将上述两个约束条件作为惩罚项加入到适应度函数,利用罚函数将有约束优化问题转为无约束广义优化问题,具体适应度函数表达式如下:
(9)
式中,BA、SWS、DTD分别为车身加速度、悬架动挠度、轮胎动载荷的均方根值;δSWS、δDTD分别为悬架动挠度和轮胎动载荷的惩罚因子;[fd]为悬架压缩行程限定值;G为矿用自卸车静载重。
3 灰狼优化算法
3.1 算法介绍
灰狼优化算法是一种基于灰狼掠食行为和狼群等级制度的群体智能优化算法,具有实现简单、控制参数少、全局搜索能力强、求解精度与收敛速度相平衡等优点,被广泛应用于路径规划、直流电机控制以及聚类分析等领域[16-18]。
灰狼算法将狼群分为如金字塔形的4个等级,从塔尖到塔座分别为α、β、γ和ω。其中,α、β和γ狼属于领导阶层,相比ω狼更能敏锐地察觉出猎物的潜在位置,负责带领群狼搜索、跟踪、靠近猎物,故在优化决策中,利用α、β和γ狼的位置(最优候选解)来判断猎物(最优解)的位置。ω狼负责在α、β和γ狼的命令下从各个方向包围猎物,当包围圈足够小时开始捕食猎物。因此,灰狼算法的优化过程就是灰狼位置更新的过程,如图7所示,抽象成数学模型如下。

图7 灰狼位置更新过程Fig.7 Location update process of grey wolves
定义1 掠食过程中灰狼与猎物的距离
D=|CXp(q)-X(q)|
(10)
C=2r1
(11)
式中,q为当前算法迭代次数;Xp为猎物位置向量;X为灰狼位置向量;C为随机向量,用于防止算法陷入局部最优;r1的模是[0,1]的随机数。
定义2 灰狼位置更新
X(q+1)=Xp(q)-DA
(12)
A=2ar2-a
(13)
式中,A为命令向量,用于命令ω狼偏离猎物以搜索到更优目标(|A|>1),或靠近猎物以开展捕食(|A|<1);a为收敛向量,随着q的增大从2线性减小到0;r2的模是[0,1]的随机数。
定义3 猎物位置跟踪
(14)
(15)
式中,Xα、Xβ、Xγ分别为α、β和γ狼的位置;Dα、Dβ、Dγ为α、β和γ狼与各ω狼间的距离;X(q+1)为当前ω狼的位置。
3.2 优化过程
利用灰狼算法迭代适应度函数,确定改进天棚控制策略的控制参数(天棚阻尼系数csky和被动阻尼系数cp),具体优化步骤如下:
(1)设置狼群数量、最大迭代次数、待优化参数个数、参数取值上下限;
(2)初始化α、β和γ狼位置,适应度值,待优化参数初始值F;
(3)若搜索位置超过搜索空间,则狼群重新回到搜索空间,根据式(9)计算F;
(4)判断F与α、β和γ狼的Fα、Fβ、Fγ的大小,若F (5)根据式(11)、式(13)、式(14)更新所有狼群个体位置,根据式(15)计算待优化参数的当前最优值; (6)若迭代结束,则寻优完成,输出各参数最优值Xi。 控制参数优化前后如表1所示。为验证灰狼算法的优化效果,选择遗传算法作为比较对象,其中,遗传算法的种群规模(20)和迭代次数(200)与灰狼算法相同,交叉概率为0.8,变异概率为0.04。两种优化算法对比结果如图8所示,灰狼算法的适应度值在迭代67次之后即收敛,而遗传算法则在142次迭代后才保持稳定,且陷入了局部最优。由此可见,灰狼算法具有收敛速度快且全局搜索能力强的优势,更适用于高频激励下工况复杂的悬架控制领域。 表1 控制参数优化情况 图8 两种优化算法对比结果Fig.8 Comparative results of GWO and GA 为验证改进天棚半主动控制策略的工作效果,在MATLAB/Simulink中搭建悬架控制器模型,并与AMESim中建立的油气悬架物理模型进行联合仿真,仿真工况选择D级随机路面,1/4满载车辆仿真参数如表2所示。 表2 1/4车辆仿真参数 油气悬架时域仿真结果如图9和表3所示,采用改进天棚控制策略的半主动悬架车身加速度均方根值相比被动悬架降低了11.4%,车辆行驶平顺性得到改善,但略低于传统天棚控制策略的降幅12.6%;改进天棚控制策略的轮胎动载荷相比被动悬架仅增加了1.1%,对车辆道路破坏程度和轮胎接地性的恶化效果可忽略不计,而传统天棚控制策略相比被动悬架却增加了17.9%,道路友好性明显变差。图10显示了三个动力学指标的幅频响应特性,相较被动悬架,传统天棚和改进天棚对车身共振段的乘坐舒适性都实现了优化,然而在车轮共振区域,传统天棚控制策略的轮胎动载荷明显增加,改进天棚略有增加,频域结果与时域结果基本一致。由此说明,改进天棚半主动控制策略可以兼顾矿用自卸车在D级随机路面下行驶的乘坐舒适性和道路友好性,本文以可控阻尼阀为控制对象的控制方案是可行有效的。 表3 悬架仿真结果均方根值对比 (a)车身加速度 (b)轮胎动载荷 (c)悬架动挠度图9 悬架时域仿真结果对比Fig.9 Comparative results in the time domain 为验证本文以可控阻尼阀为控制对象的改进天棚控制策略的实际工作效果,利用基于模型设计(MBD)方法开发了半主动油气悬架ECU,并基于MathWorks xPC_Target平台搭建了油气悬架ECU硬件在环试验台架,台架布置如图11所示。试验工况与联合仿真工况相同,即车辆以30 km/h车速在D级路面行驶。 (a)车身加速度 (b)轮胎动载荷 (c)悬架动挠度图10 悬架频域仿真结果对比Fig.10 Comparative results in the frequency domain 图11 油气悬架ECU硬件在环试验台架布置Fig.11 Bench layout of hardware-in-loop test 图12显示了联合仿真与硬件在环试验对比结果,可以看出,三个动力学指标的时域曲线基本一致,但仍然存在偏差。主要原因是可控阻尼阀的数学模型以及改进天棚控制策略控制律的判断条件较为复杂,且运算过程大多为浮点型运算,限制了油气悬架ECU主控芯片的计算效率,使得ECU存在工作时滞,最终造成试验结果与仿真结果存在偏差,这是不可避免的,也符合悬架ECU真实工作场景。表4列出了各指标均方根值偏差,其中,车身加速度、轮胎动载荷和悬架动挠度偏差分别为4.29%、1.61%和2.76%,均不超过5%,故试验结果在合理范围内。硬件在环试验与仿真结果的一致性验证了本文所提出的半主动油气悬架控制方案在协调矿用自卸车乘坐舒适性和道路友好性的有效性和可行性,具有一定的工程实践意义。 (a)车身加速度 (b)轮胎动载荷 (c)悬架动挠度图12 试验结果对比Fig.12 Comparison between hardware-in-loop test and simulation results 表4 悬架试验结果均方根值对比 为解决矿用自卸车乘坐舒适性和道路友好性相矛盾这一问题,提出了一种以可控阻尼阀为执行器的半主动控制方案,建立了油气悬架系统非线性模型,设计了改进天棚控制策略,并搭建硬件在环试验台架,进行了控制器试验研究。研究结果表明:考虑摩擦力的油气悬架AMESim物理模型和可控阻尼阀力学模型能较好地描述系统力学特性,试验结果验证了建模精确性,为悬架控制算法奠定了基础。设计了以可变阻尼阀驱动电压为半主动控制对象的改进天棚控制策略,并基于灰狼优化算法对控制策略的关键控制参数进行优化,证明了灰狼算法在高频激励下的悬架控制领域的应用潜力。联合仿真结果表明,D级随机路面下,半主动油气悬架兼顾了矿用自卸车的动力学性能。硬件在环试验结果表明,该控制方案能有效改善车辆动力学性能。3.3 优化结果分析


4 联合仿真分析




5 硬件在环试验



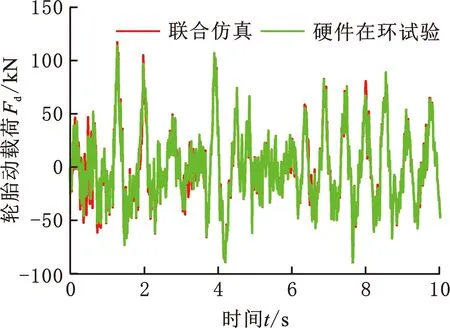
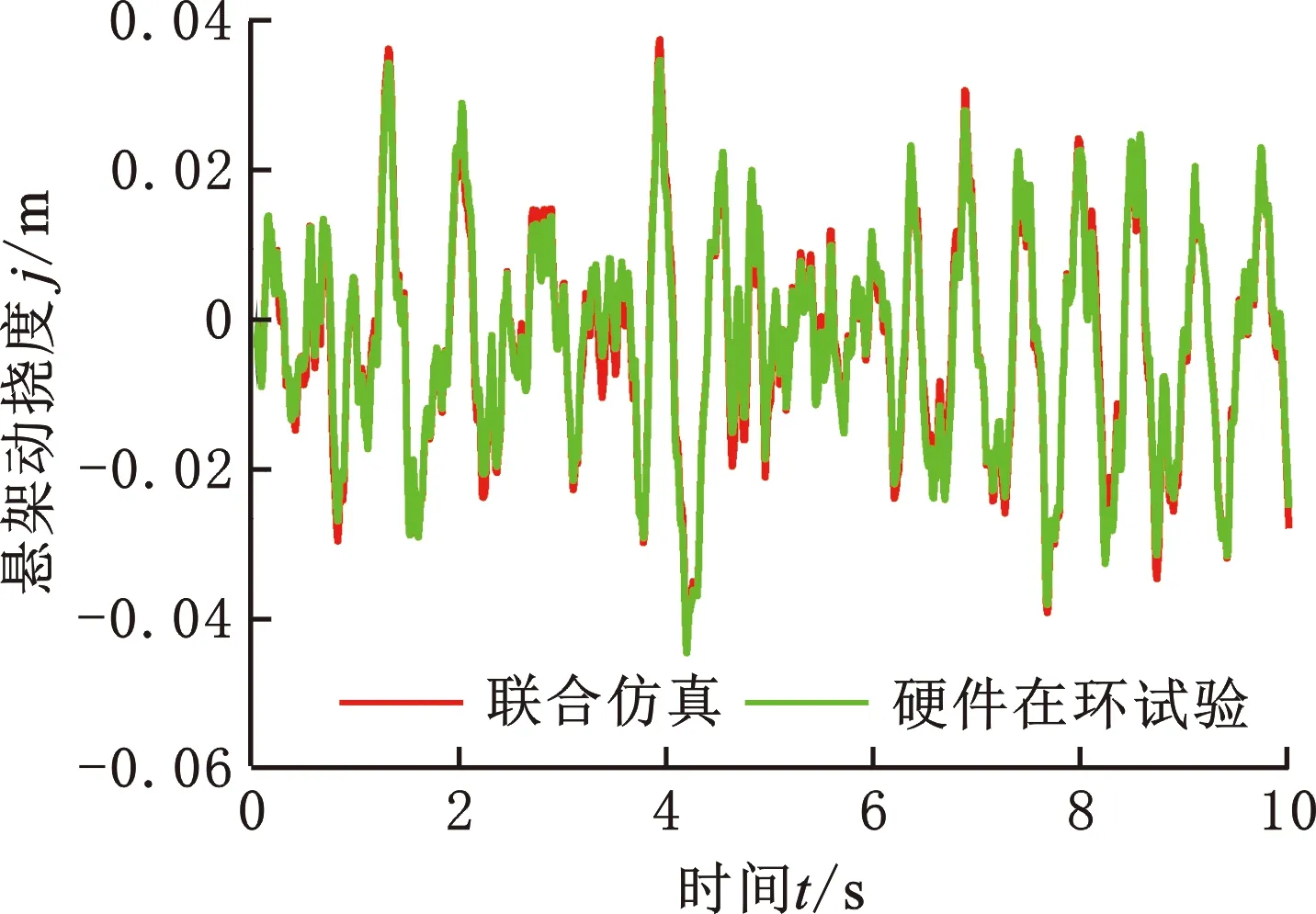
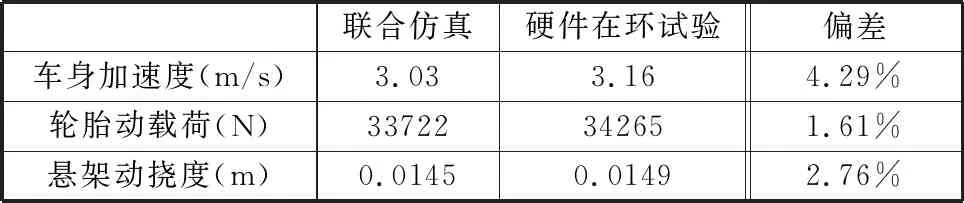
6 总结
