骑行过程中智能手机分心行为检测模型研究
2023-03-06罗少鹏雷胡晟
罗少鹏 王 涛 雷胡晟
(桂林电子科技大学,广西 桂林 541004)
电动自行车骑行过程中智能手机使用行为,已成为非机动车事故的主要原因之一。据统计,有将近30%的用户有骑电动自行车时使用手机的习惯。研究骑行过程中手机分心行为对骑行安全的影响,构建骑行过程中手机分心检测模型,有助于丰富当前电动自行车骑行安全的研究,可为分心预警系统提供依据。学者对手机使用行为对驾驶表现的影响及分心判别表现开展了研究[1-3]。Patten等[4]通过设计实车试验探究不同难易程度对话内容在手持免提通话条件下驾驶员反应时间的差异,结果表明通话模式并无明显差异,但随着通话内容的复杂度增加,驾驶员的反应时间越长。高岩等[5]分析了在不同手机操作任务下车辆运行特性和视觉特性,结果表明发送文字信息对驾驶人跟车的影响最大,阅读文字信息次之。廖源[6]通过设计试验采集驾驶人视觉特征和车辆运行特征数据并选取最优特征子集,构建高速公路和城市道路场景下的SVM判别模型,判别准确率为93%和98.5%。Liu等[7]基于驾驶人头部运动数据和眼动数据,采用半监督学习构建分心识别模型,研究发现该模型识别精度高达97.2%。周扬等[8]基于视觉特征构建随机森林模型对驾驶人认知分心状态进行识别,结果表明模型识别准确率为83.69%。机动车分心行为的相关研究较为完善,但电动自行车分心行为研究仍然较为缺乏,较少有学者通过实车试验的方法对电动自行车不安全骑行行为进行研究。本文借鉴国内外机动车驾驶员使用手机行为的研究经验,将设计实车试验的方法,探究智能手机使用行为对电动自行车骑行安全的影响并构建骑行分心检测模型。
1 实车试验方法
1.1 试验设计
试验任务:在骑行过程中,使用手机的行为非常普遍,且操作的功能类型各不相同。针对典型的手机操作功能进行研究,本文共设计了两种手机操作方式,分别是手持通话和发送微信,正常骑行作为对照组。
被试人员:本试验招募若干名有骑行过程中使用手机经验的骑行者。共招募32名被试人员参与试验,其中男性24人,女性8人。被招募的骑行者身体状态良好,无视觉和听觉障碍。
试验设备:电动自行车数据采集系统由九轴姿态传感器、GPS定位系统、摄像机组成。摄像机安装在电动车车头,镜头对准被试者,用来记录被试者骑行过程中的行为动作,后期用于截取被试者手机测试任务开始和结束时间点。GPS定位系统采样频率为10 Hz,能够测量骑行过程中电动自行车的实时速度、经纬度以及骑行轨迹。九轴姿态传感器传输频率为10 Hz,集成了高精度陀螺仪、加速度计和地磁场传感器,能够实时记录电动自行车的加速度、角速度、航向角。
试验车辆:本试验采用普及率较高的电动自行车,电动自行车加速及刹车性能正常,行驶性能良好且电量充足,电动自行车贴有“试验车辆测试,请勿靠前”字样,并为受试者提供头盔和反光背心,保障骑行者骑行安全。所有被试人员骑同一辆车,消除不同车况引起的车辆运行数据差异。
试验地点:本试验探究骑行过程中手机使用行为,具有一定危险性,试验路段选取需要排除车辆及环境差异等干扰因素且交通流量较少、道路平坦直顺的路段。考虑以上因素,本试验选取桂林电子科技大学校园,全长2 km的双向道路,该路段路面状况良好,无小半径曲线。
1.2 试验过程
步骤一:被试人员阅读试验说明及注意事项,了解试验任务。
步骤二:试验人员向被试人员发放个人基本信息调查表,要求如实填写。
步骤三:试验人员将GPS定位系统和九轴姿态传感器等设备安装在电动自行车上并进行设备校准和测试;被试人员佩戴安全头盔和反光背心。
步骤四:被试人员先进行预试验,试验人员带领被试人员熟悉试验路线,强调在骑行过程中按照被试人员日常的习惯骑行。
步骤五:被试人员在无手机操作状态下骑行第一圈,无任务骑行完毕后进行任务骑行试验,被试人员骑行至手机任务发起点时,根据试验人员发起的手机任务提醒完成相应任务。每两个操作任务之间会设置一个大约1 min的间隔,防止相邻操作任务产生干扰。
步骤六:各项骑行任务完成后,试验人员检查数据是否有缺失,如果数据不完整或不符合试验要求,被试人员应重新进行试验。
1.3 特征参数提取
根据国内外相关研究并结合现有试验设备,本研究选择的特征参数有平均速度、速度标准差、纵向加速度标准差、平均角速度、角速度标准差、横向加速度标准差。九轴姿态传感器、GPS定位系统分属不同设备且未集成同步功能,但各数据采集系统采用计算机系统时间,故可将各设备间的系统时间同步。在试验开始时记录各试验设备的开始时间,数据处理阶段结合摄像机记录视频的时间轴,截取相应手机测试任务时间段各设备的数据。对本实验数据进行假设性检验时,发现一些样本无法较好地满足正态性检验,选用Friedman检验和Nemenyi事后多重比较检验哪两组之间存在显著性差异。由检验结果可知,除横向加速度标准差在不同骑行任务下不存在显著性影响外(P>0.05),其他5项指标均存在显著性影响(P<0.05)。最终选定平均速度、速度标准差、纵向加速度标准差、平均角速度、角速度标准差构建骑行分心检测模型特征参数集。
2 骑行分心检测模型
随机森林模型是典型的Bagging模型,该模型是使用多棵树的分类器,样本由决策树训练和预测,对异常值和噪声具有较强的容忍性,可用于数据分析,同时对每个变量的重要性给予评分。
遗传算法是一种进化计算技术,其灵感来自生物学中的自然选择和遗传进化。遗传算法模拟了生物进化的过程,通过模拟基因的交叉、变异和选择优化问题的解。遗传算法通常用于优化问题,包括函数最优化、组合优化、机器学习等领域。在使用遗传算法求解问题时,首先需要将问题转换为一个适应度函数,函数能够描述个体的适应程度或优劣程度。遗传算法将适应度函数最大化或最小化,从而找到最优解。
本研究共选取5项特征参数,骑行者的骑行状态(正常骑行、手持通话、发送微信)标记为0、1、2。采用遗传算法优化的随机森林模型参数,利用最优模型对骑行分心状态进行检测。通过Python中的Scikit-Learn构建骑行分心检测模型。
随机森林模型构建流程如图2所示。
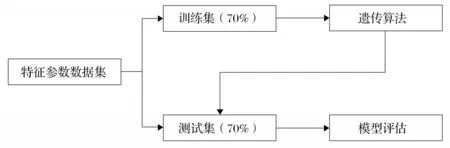
图2 随机森林模型构建流程
2.1 模型训练
将数据集拆分为两个部分,分别是70%数据量的训练集、30%数据量的测试集,利用训练集数据构建模型,并确定模型参数的最优参数。
步骤一:从原始数据中随机有放回地抽取样本,生成一个有n个样本的随机抽样训练集。这个过程称为Bootstrap过程。
步骤二:从训练集中随机选取k个特征,建立决策树。其中,k一般是小于特征总数的一个常数。
步骤三:重复步骤一、二,建立N棵决策树。
步骤四:对于每个测试样本,让N棵决策树分别进行预测,并统计预测结果中票数最多的类别作为最终的预测结果。
随机森林算法参数众多,超参数的设置会影响模型的辨别效果,随机森林主要调整参数为:内部节点分裂最小样本数、树的最大深度、叶子节点的最大数量、决策树数量。采用遗传算法对模型参数进行寻优,以达到更好的分类精度。遗传算法参数设置为:初始种群个数50、最大迭代次数150、变异概率0.1。经多次迭代后,模型的最优参数为:内部节点分裂最小样本数为2、树的最大深度为17、叶子节点的最大数量为150、决策树数量为199。
2.2 模型评价
使用测试集数据对训练集所训练的模型进行评估,评价指标为准确率、召回率、精确率和F1值,对模型性能进行评估,并将其与传统分类模型支持向量机(SVM)算法进行比较。
模型检测性能结果如表1所示。

表1 模型检测性能结果 单位:%
GA-RF指标结果均高于SVM的表现,说明在进行骑行者骑行状态检测时,GA-RF的效果更佳。
3 结语
本文建立基于GA-RF构建了电动自行车骑行过程中手机使用行为检测模型,通过配备的设备采集系统采集了各项数据对模型进行训练验证。结果表明GA-RF的精确率为92.8%,F1值为89.8%,GARF可以对骑行者骑行状态进行检测。与SVM结果相比,GA-RF指标结果均高于SVM,GA-RF模型检测效果更佳。本试验仅选用了32位骑行者参与试验,样本量较少,且仅选择骑行时通话和发送微信作为手机行为,但实际上骑行者骑行过程中使用手机的行为有很多,为扩大检测模型的适用范围,未来应该丰富对骑行过程中手机行为的研究。