大变形柔性虎克铰链设计与分析
2023-02-21敬子建
李 含,敬子建,亓 波
(1.中国科学院光束控制重点实验室,四川 成都 610209)(2.中国科学院光电技术研究所,四川 成都 610209)(3.中国科学院大学,北京 100049)
现有的机器大多采用传统的刚性铰链作为连接部件传递力和运动,但是由于刚性铰链自身存在间隙,其在高速、高温、振动等场合应用时,摩擦、润滑及冲击等问题逐渐凸显。在航空航天器、精密光学仪器等应用场合,刚性铰链已经不能满足使用需求,人们便把目光转向了柔性铰链[1]。
柔性铰链是一种利用材料的变形产生位移的特殊运动副,在扭转载荷下,绕其回转中心在有限角度范围内产生回转运动[2]。与传统的刚性铰链相比,具有无空回、无摩擦、无间隙、无噪声、空间尺寸小、运动灵敏度高、运动稳定等优点[3-4],在精密机械、机器人、空间光学、航空航天等领域应用广泛。
关于单自由度的柔性铰链的研究已经较为成熟,而具有2个转动自由度的柔性铰链还需要进一步研究[5-8]。目前具有2个转动自由度的柔性铰链可分为3类:切口型二维柔性铰链、直圆形切槽柔性铰链以及普通簧片型虎克铰链[9-12]。其中切口型二维柔性铰链和直圆形切槽虎克铰链结构简单、刚度大,但是转动角度较小;普通簧片型虎克铰链转角大,但是结构刚度较小、精度低。由于柔性铰链是依靠自身的弹性变形来完成转动运动,因此铰链很难同时满足高刚度和大转角的要求。为解决该问题,本文设计了一种大行程柔性虎克铰链,该铰链采用多组弹性单元和对称性结构,具有大转动角度和高运动精度,而且在其4个非转动自由度上具有较大刚度。
1 铰链设计
普通的刚性虎克铰链[13]共分为3个部分:十字轴和2个垂直的U型铰链支座。U型铰链支座和十字轴通过滚动轴承相连,虎克铰链具有2个转动自由度。
本文在普通刚性虎克铰链结构形式基础上,结合蝶型柔性机构[14]设计了一种具有2个转动自由度的柔性虎克铰链,包括2个柔性铰链支座和1个中间运动块,如图1所示。铰链支座两侧各有1个蝶型柔性机构,蝶型柔性机构起到代替滚动轴承的作用,消除了轴承带来的间隙问题。每个蝶型柔性机构具有8个簧片,8个簧片长度相等,分为4对,以V字型呈对称分布,簧片中心线交于一点,该点为蝶型机构的转动中心点。对称式结构和多组弹性单元减小了每一级簧片的变形角度,降低了铰链内应力,提高了铰链寿命。
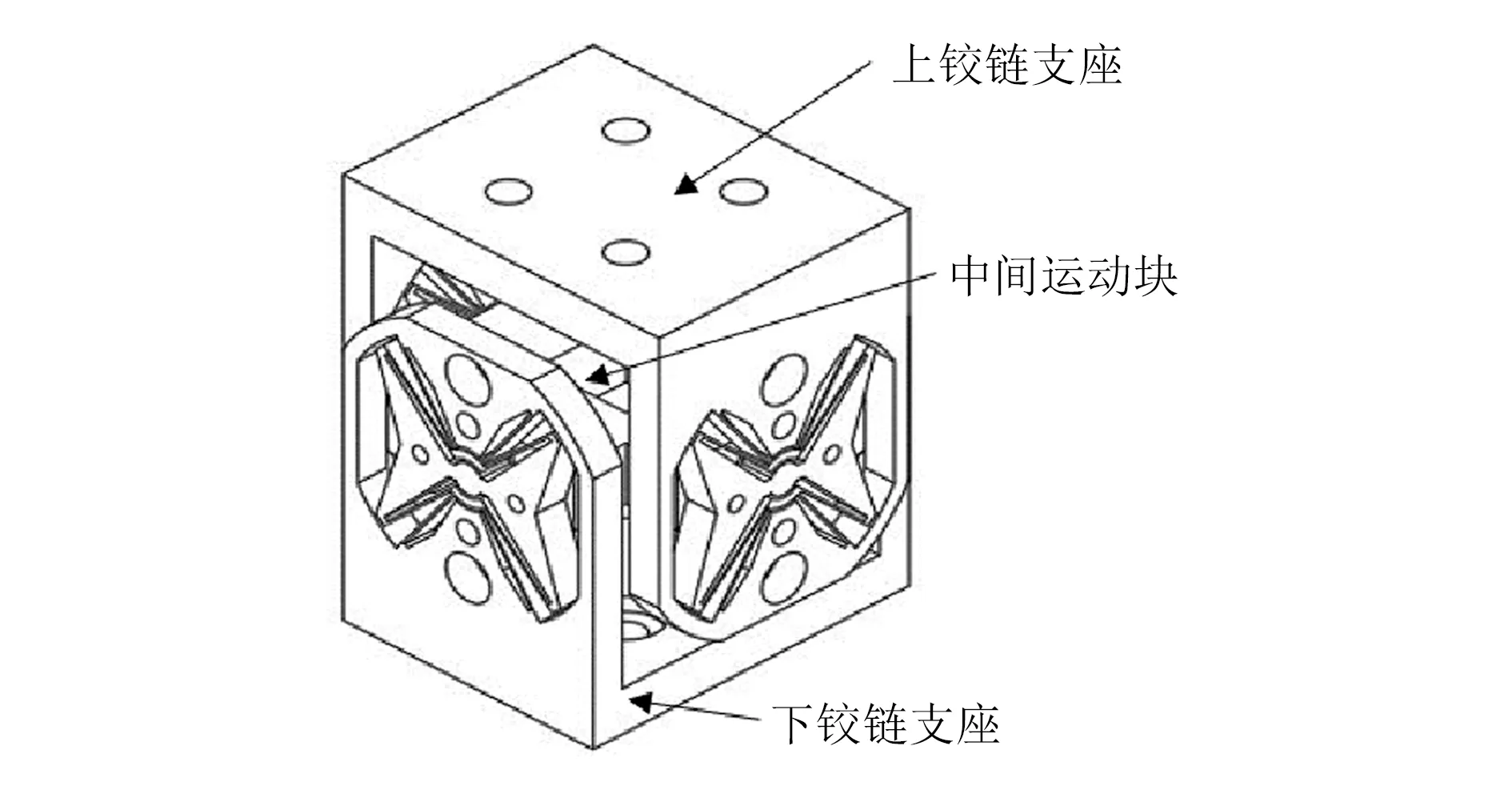
图1 柔性虎克铰链结构示意图
中间运动块用于连接2个铰链支座,2个铰链支座交错固定于中间运动块4个侧面上。U型铰链支座上2个蝶型机构的转动中心点的连线为柔性虎克铰链的1条转动自由度轴线,2个U型铰链支座垂直交叉放置,2条转动自由度轴线垂直相交于一点,该点为柔性虎克铰链的转动中心点,位于中间运动块中心。
2 铰链有限元分析
2.1 静力学分析
本文采用有限元分析软件ABAQUS对柔性虎克铰链进行静力学仿真分析,计算虎克铰链集中应力与运动范围的关系。首先建立柔性虎克铰链的有限元模型,模型网格单元选取线性六面体单元,材料采用7075铝合金,弹性模量为72 GPa,泊松比为0.33,抗拉强度为524 MPa,屈服强度为455 MPa,以柔性虎克铰链的转动中心为坐标原点,2个转动自由度分别为绕X轴的转动和绕Y轴的转动。
静力学分析分为两部分,第一部分是求解柔性虎克铰链的最大偏转角度,第二部分是对柔性虎克铰链偏转角度与所受最大应力之间的关系进行分析。
求解铰链最大偏转角度的具体步骤如下:首先在铰链的每组簧片间建立表面接触关系,避免铰链在转动分析中造成模型穿透,影响计算结果;然后在柔性虎克铰链下铰链支座的底部施加固定约束,使铰链下端面在6个自由度上完全固定;再对柔性铰链的上铰链支座4个安装孔处施加集中力载荷,可使铰链分别绕X轴和Y轴转动;最后建立线性静力分析步,提交分析作业。
通过有限元分析计算,得到铰链受力偏转后的仿真结果云图,如图2所示:铰链发生偏转运动时,形变均发生在簧片上,其中最大应力位于簧片根部,铰链其他结构部位无明显变形。在云图上对铰链偏转角度进行测量,得到铰链绕X轴的最大偏转角度和绕Y轴的最大偏转角度,均约为±9°。
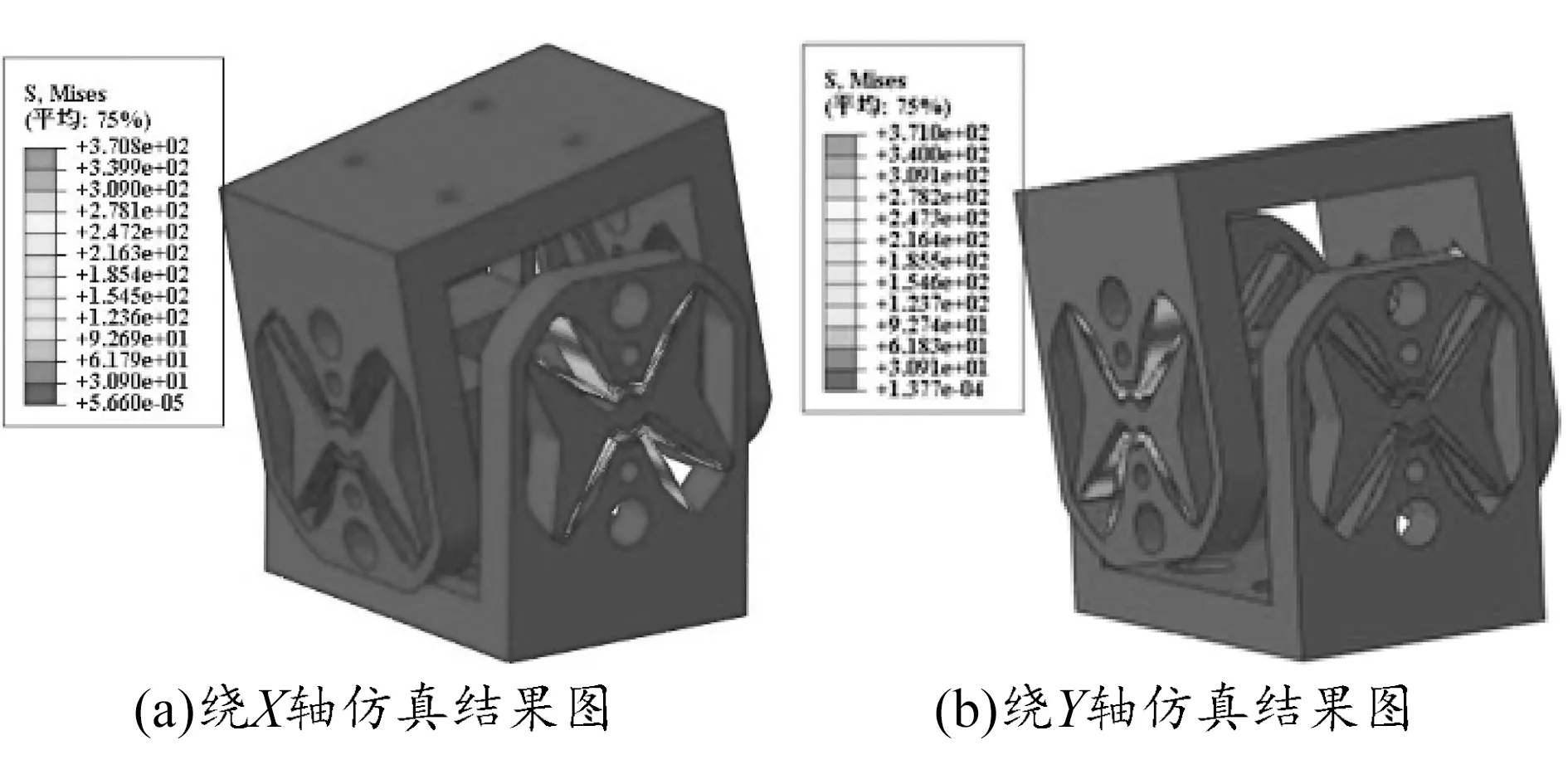
图2 转角仿真结果云图
在已知铰链最大偏转角度的基础上,对铰链偏转角度和所受最大应力之间的关系进行分析,具体分析步骤如下:首先同样在柔性虎克铰链下铰链支座的底部施加固定约束,使铰链下端面在6个自由度上完全约束;再对上铰链支座的上表面分别施加绕X轴和绕Y轴的转角位移边界条件,转角幅值范围都为0°~9°,每隔1°进行一次应力计算;最后建立线性静力分析步,提交分析作业,结果如图3所示。

图3 铰链偏转角度与最大应力关系图
由图可知:绕X轴和绕Y轴的偏转角度与最大应力均呈明显的线性关系,表明该铰链具有良好的线弹性;铰链绕X轴和绕Y轴两个转动自由度上的转角和应力关系曲线几乎吻合,验证了虎克铰链的结构对称性。图中最大应力随着偏转角度的增大而增大,铰链在单向转动到最大偏转角度时,最大应力值为333 MPa,小于7075铝合金的许用应力,表明该铰链转角范围理论上可达±9°。
2.2 模态分析
模态分析是指在不考虑施加载荷的情况下进行线性动力学分析,用来确定结构的动力学固有特性,结构的模态由结构本身的特性和材料特性所决定。本文利用ABAQUS软件对柔性虎克铰链的前6阶模态进行分析,在上述有限元模型基础上重新设定边界条件,将虎克铰链的下端面进行固定,建立求解频率的分析步,进行模态计算,得到了铰链前6阶固有频率和振型。表1为柔性虎克铰链前6阶模态分析结果。

表1 铰链前6阶模态分析结果表
由表可知:铰链1阶和2阶为整体模态,振型分别是铰链绕Y轴和绕X轴的偏转,固有频率分别为5.2 Hz和6.7 Hz,3阶及3阶以上均为局部模态,振型均为铰链上的个别簧片绕X轴或者Y轴的旋转,固有频率均在450 Hz以上,与前2阶固有频率具有较大差值。说明柔性虎克铰链在绕X轴和绕Y轴2个转动自由度上具有较大柔度,在其另外4个非所需自由度上具有较大刚度,对柔性虎克铰链有较好支撑作用,可保证铰链的运动精度。
2.3 轴漂分析
理想的铰链可以围绕着转动中心转动,但对于多数柔性铰链而言,由于弹性变形不能集中在一个点,其在转动时转动中心就会发生偏移,该偏移值被称为转动轴心漂移,简称轴漂。本文所设计的柔性虎克铰链采用对称结构和多组弹性单元减小了每一级簧片的变形角度,降低了铰链的轴心漂移值,提高了铰链精度。
本文采用有限元软件ABAQUS分析铰链偏转角度和轴心漂移的关系,铰链偏转角度范围为0°~9°。有限元网格模型采用2.1节建立的静力学分析模型,首先在铰链下端面施加固定约束,在铰链上端面的4个安装孔处施加集中力载荷,模拟铰链实际工况下的受力情况。然后建立线性静力分析进行计算,得到计算结果。最后输出铰链转动中心的位移曲线,该位移值便是轴心漂移值。由于本文设计的铰链中间运动块的中心点不是在实体上,无法直接捕捉节点,故此处测量蝶型机构的转动中心点的位移,这两点可以看作是同一刚体上的两点,该节点的位移值可以认为是铰链的轴心漂移值,如图4所示,箭头所指处为测量点。通过测量铰链在集中力载荷作用下偏转0°,1°,2°,…,9°时的轴心漂移值,可得铰链偏转角度和轴心漂移的关系。

图4 轴漂测量点示意图
图5所示为铰链绕X轴和绕Y轴2个转动自由度上偏转角度与轴心漂移的关系图,两者均为线性变化关系,轴漂的值随着偏转角度的增大而增大,铰链在达到较大转角时,绕X轴的轴心漂移值约为7.8 μm,绕Y轴的轴心漂移值约为11.1 μm,表明柔性虎克铰链具有较高的转动精度。
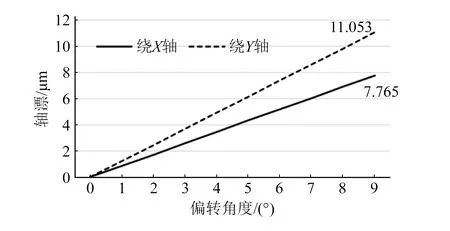
图5 铰链偏转角度与轴漂关系图
此外,在转动同样的角度时,铰链绕Y轴的转动轴漂略大于绕X轴的转动轴漂,通过分析,可知造成此结果的原因如下:在上铰链支座的上端面施力使铰链绕X轴转动时,上端面直接带动上铰链支座的一对蝶型机构进行偏转运动,此时测得的轴心漂移只由上铰链支座的一对蝶型机构产生,而当在上铰链支座上端面施力使铰链绕Y轴转动时,力先是带动上铰链支座转动,此时产生了一定轴心漂移,然后上铰链支座再带动中间运动块转动,最后中间运动块带动下铰链支座的一对蝶型机构转动完成绕Y轴的偏转,此时又产生了一定轴心漂移,所以绕Y轴转动的轴心漂移值大于绕X轴的轴心漂移值。
3 转角测试试验
由于铰链的偏转角度不能直接测量,因此需要将角度值转换为直线位移值进行测量。测量原理如图6所示,水平线表示偏转前铰链上台面,倾斜线表示偏转后铰链上台面,O点为铰链的转动中心点,两条线之间的夹角θ为铰链的偏转角度,Y1和Y2为铰链上台面偏转过程中的竖直位移。

图6 转角测试原理图
为得到铰链偏转角度θ的大小,选择在铰链上端放置2个激光位移计,激光位移计测头固定不动,两者之间的距离不变,位移计测得铰链上台面在偏转过程中的2个位移量Y1和Y2,由此可计算出铰链的偏转角度θ,计算过程如下。
已知:
(1)
由合分比定理可知:
(2)
所以可得:
(3)
其中:(Y1+Y2)为2个激光位移计测得值的和,可直接由激光位移计输出;(X1+X2)为2个激光位移计测点之间的距离。
图7为铰链转角测试试验装置图,整个试验装置由上平台、被测铰链、固定基座、精密步进电机(驱动力为40 N,运动分辨率为0.007 μm)以及激光位移计组成。铰链和驱动电机均固定于基座上,两个驱动电机分别位于铰链的两侧,上平台被固定于被测铰链上端,驱动电机推动上平台的两端带动铰链进行两个方向的转动。其中上平台两端向下延伸,目的是使驱动电机的推力刚好在铰链转动中心水平线上,减小铰链转动过程中的误差。

图7 测试试验装置图
2个激光位移计测头位于上平台上方,可测上台面的竖直位移变化量Y,两测头之间的距离为28 mm,固定不变。测量时,电机先向上运动推动铰链转动,然后电机向下运动,缓慢撤去作用在铰链上的推力,最后铰链恢复到初始位置,此过程为一个转动自由度的偏转角度测量过程。完成一次测量后,将铰链重新按另一个待测方向安装于试验装置上,进行另一个转动自由度的偏转角度测量。测量结果如图8所示,一共有4组数据,分别是绕X轴2个方向的转角测量和绕Y轴2个方向的转角测量,输出的位移值为2个激光位移计所测值的和。
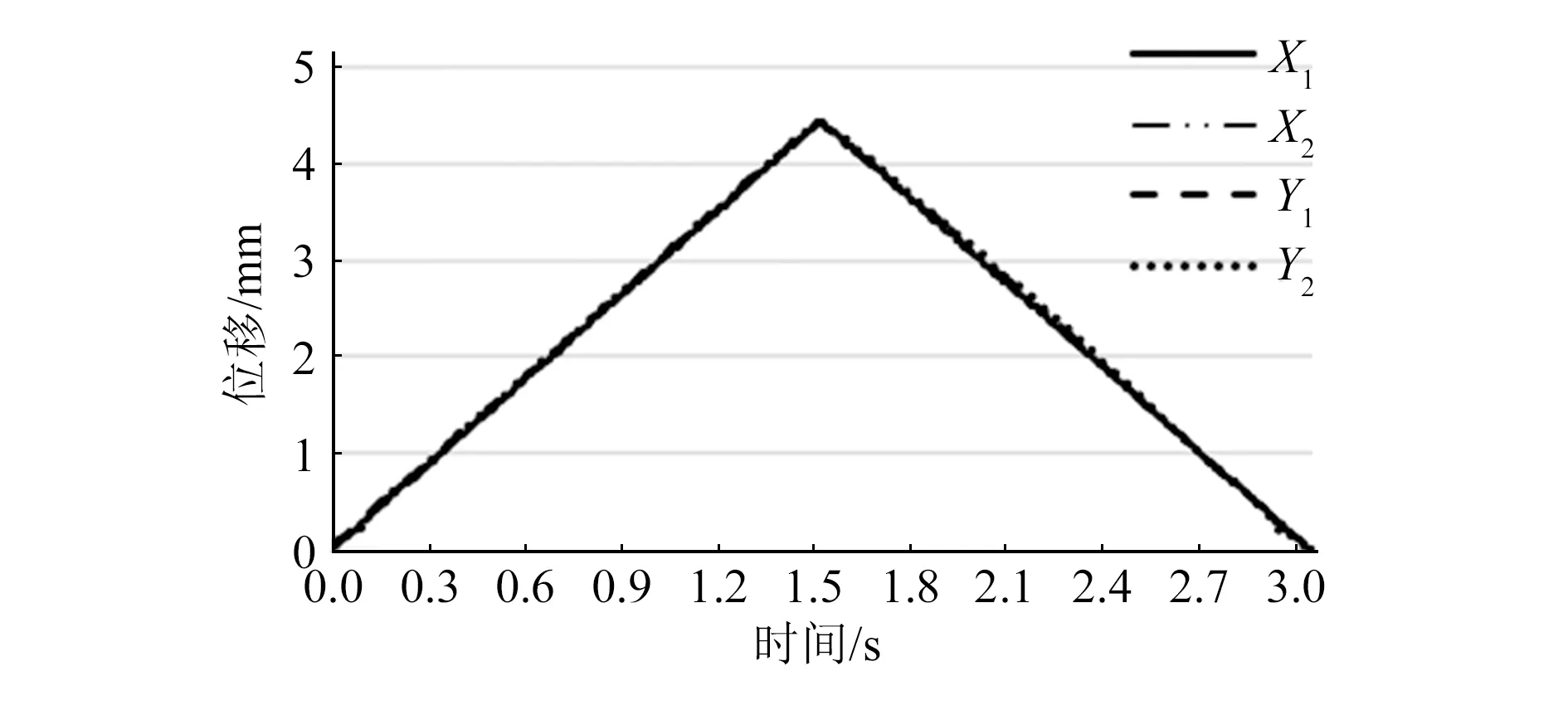
图8 转角测试结果图
柔性虎克铰链理论上2个转动自由度之间是不存在运动耦合的,但还需试验进一步验证,通过调整该试验装置测量点的位置,即可判断铰链的2个转动自由度之间是否存在运动耦合。测量铰链偏转角度时,2个测量点均位于正在转动的自由度轴线上,而测量运动耦合时,2个测量点位于非转动的自由度轴线上,测量点之间的位移差值同样表示该自由度上的转动角度,如果铰链不存在运动耦合,无误差情况下,2个测量点之间的位移差值应该为0。实际测量结果如图9所示,输出的位移值,为两个测量点的位移差值。
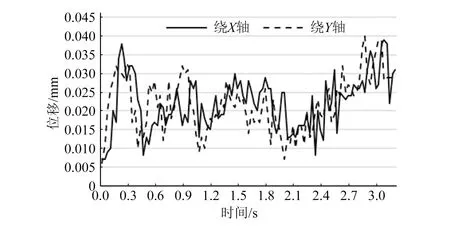
图9 运动耦合测量结果图
结果表明:在铰链绕一个轴转动时,另一个转动轴上2个测量点之间的位移差值呈上下波动趋势,无明显的上升趋势,且铰链在转动到最大角度时,最大位移差值为0.040 mm,远小于上述最大偏转角度时的位移值4.426 mm,说明铰链的2个转动自由度之间运动耦合极小。
4 结束语
针对传统刚性铰链间隙大、摩擦大,以及现有的柔性虎克铰链大转角和高刚度难以同时满足的问题,本文在参照刚性虎克铰链结构形式的基础上,结合蝶型柔性机构设计了一种柔性虎克铰链。测试结果表明,铰链具有[-9°,9°]的偏角范围,以及小于11 μm的轴心漂移,且在非转动自由度上具有较大刚度,适用于航空航天器以及精密光学仪器等应用场合。虎克铰链作为双自由度运动副,运动耦合是不可避免的,从本文的测试结果来看,该柔性虎克铰链可进一步进行结构优化,以降低运动耦合、提高运动精度。
