三自由度差动式微位移放大运动平台设计
2023-02-21孟繁勋张士军高新宇张译匀刘彦丰
孟繁勋,张士军,张 腾,高新宇,张译匀,刘彦丰
(山东建筑大学机电工程学院,山东 济南 250101)
随着人类社会和科学技术的飞速发展,人们对微观事物的探索逐渐深入,在纳米技术[1]、精密加工技术[2]等领域,对精密定位技术的要求越来越高。
压电陶瓷驱动器[3]是一种微位移驱动器件,其位移运动精度高,具有线性度好、无机械摩擦等特点,已广泛应用于微纳米柔性铰链定位平台领域,但其驱动位移非常微小,需要通过位移放大机构实现较大的运动行程。目前,主要通过柔性位移放大机构来实现压电陶瓷的位移放大工作,相比传统的机械传动链接,柔性铰链具有免装配、无间隙和无摩擦的特点,被广泛应用在精密定位技术中[4-5]。
迄今为止,柔性微位移平台的研究已经有了不少的研究成果,其研究的几个关键问题包含如何扩大运动行程、如何提高运动精度,但现有的柔性铰链微位移平台,提高了运动行程,就会降低运动精度,难以同时满足使用要求。基于此,本文设计了一种由压电陶瓷驱动的平面三自由度柔性铰链微位移定位平台,该新型精密定位工作台可以同时具有大运动行程、高运动精度的特点,弥补了现阶段微位移定位平台的不足。
1 微位移放大运动平台设计
相对于杠杆放大机构[6]而言,桥式放大机构[7]的放大比只与夹角θ有关,可以在获得较大的放大比的同时不占用较多的结构空间。将桥式放大机构和杠杆放大机构组合成为差动式运放结构[8],从而只需要一个压电陶瓷的位移输入就可以获得更大的放大比。
基于此,笔者设计了一种采用压电陶瓷驱动的柔性并联机构定位平台,其柔性微位移放大机构是由2个桥式放大机构和1个杠杆放大机构所组成的差动式放大机构。
平面三自由度纳米定位平台的整体结构、平面结构分别如图1,2所示。
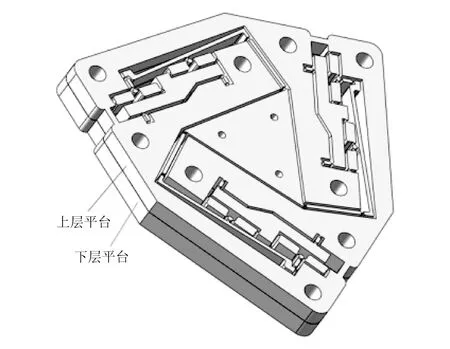
图1 平面三自由度纳米定位平台的整体结构
该定位平台分为上下两层,由螺栓链接,每层结构分布一样,主要由固定平台、三自由度运动平台、3个柔性微位移放大机构组成。上、下层平台的微位移放大机构不同之处在于传动链的传动刚度不同。6个压电陶瓷分别放置在图2所示的压电陶瓷放置位置,驱动与之相连接的狭长平动部件。
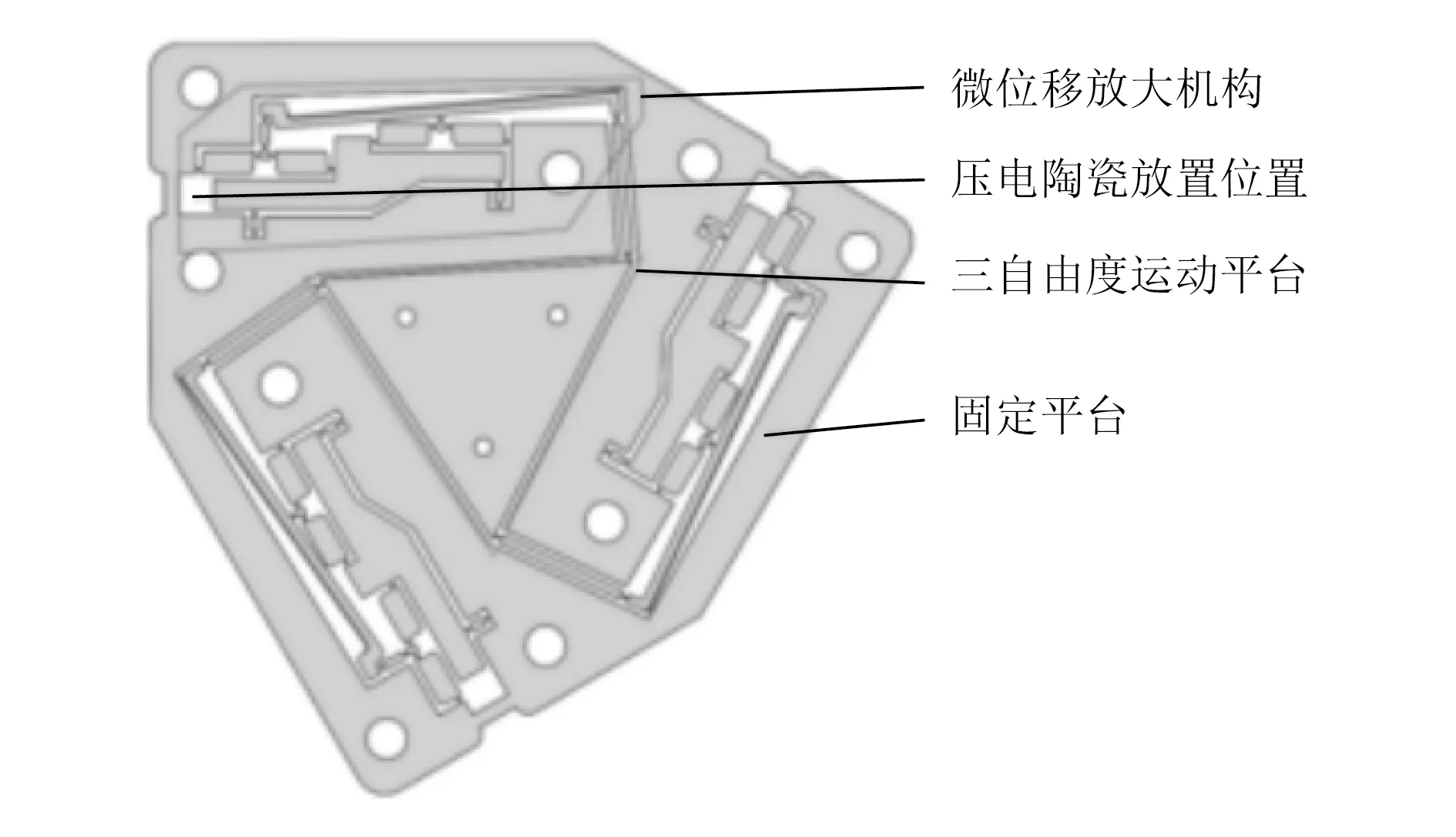
图2 平面三自由度纳米定位平台的平面结构
1.1 微位移放大机构设计
图3为微位移放大机构结构图。图中构件2、构件3和构件6之间的柔性铰链可视为复合铰链,构件4、构件5和构件7之间的柔性铰链也可视为复合铰链,构件8与构件9加上其上下两端的直圆型柔性铰链可视为水平移动副,所以微位移放大机构的机构简图如图4所示。

图3 微位移放大机构结构图

图4 微位移放大机构的机构简图
设构件个数为n,运动副个数为p。由图4可知,共有7个构件(构件1为原动件)、10个运动副(复合铰链2个),其中移动副1个,转动副9个,则整体自由度F为[9]
F=3n-2p=3×7-2×10=1
(1)
1.1.1桥式放大机构位姿分析
桥式放大机构的运动简图如图5所示,固定坐标系为oxy,θ1为杆ab与x轴的夹角,θ2为杆bc与x轴的夹角,设压电陶瓷驱动器的输出位移为ρ,由位移放大机构放大后在点b的输出位移为d,dx和dy分别为d沿x,y轴的分量。

图5 桥式放大机构的运动简图
该桥式放大机构是对称结构,设杆ab、杆bc长度分别为lab和lbc,有lab=lbc,θ1=θ2,由桥式机构位移放大原理可得:
(2)
(3)
(4)
(5)
1.1.2杠杆放大机构位姿分析
杠杆放大机构的运动简图如图6所示,由桥式放大机构可得点b和点f的位移,点b和点f作为杠杆放大机构的输入端,可视为在两点处分别加了一个移动副,固定坐标系为o′x′y′,θ3为杆bd与x轴的夹角,θ4为杆dh与x轴的夹角,点b和点f的输入位移为d和d′。点h的输出位移为n,nx和ny分别为n沿x,y轴的分量。
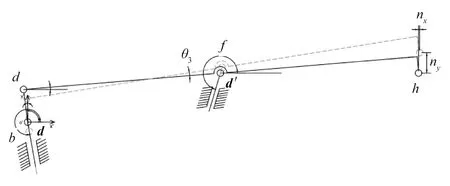
图6 杠杆放大机构的运动简图

由杠杆机构位移放大原理可得:
(6)
(7)
1.1.3微位移放大机构放大比
由勾股定理得微位移放大机构放大比k为:
(8)
1.2 三自由度运动平台设计
3-PRR柔顺并联平台机构运动简图如图7所示。点hi作为杠杆放大机构的输出端,可视为在点hi处加了一个移动副,i=1,2,3。
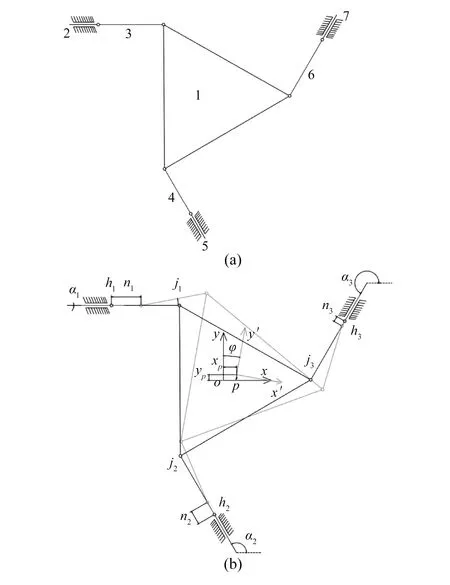
图7 3-PRR柔顺并联平台机构运动简图
由图7(a)可知,共有7个构件(构件1为原动件)、9个运动副,其中移动副3个,转动副6个,则整体自由度F为
F=3n-2p=3×7-2×9=3
(9)
即平面三自由度柔顺并联机构共有3个自由度,分别为沿x和y轴的平动以及绕z轴的旋转。
图7(b)中,oxy为静坐标系,静坐标系原点o位于整个平台的中心处;px′y′为固定于动平台中心的动坐标系;末端移动平台的输出位移u=[xp,yp,φ],xp为平台沿x轴的位移,yp为平台沿y轴的位移,φ为动平台绕z轴的转动角。点hi为位移输入端,各点输入位移n=[n1,n2,n3],n1,n2,n3为3个微位移放大机构对3-PRR柔顺并联平台机构的输入量。αi为ni与x轴的夹角;βi为x轴与刚性连杆hiji的夹角,i=1,2,3。
由3-PRR柔顺并联机构闭链约束可得约束方程[10]:
loh+lhj=lop+lpj
(10)
(11)
(12)

式(11)、(12)消去βi可得到方程:
(13)
将ni的值域代入公式(13),可解得xp,yp,φ的值域,如图8所示。

图8 3-PRR并联平台行程图
由图8可得:在φ=0.032 675°时,x轴的行程为-0.030 1~0.030 1 mm,y轴的行程为-0.032 8~0.032 8 mm;在xp=0、yp=0时,φ范围为0~0.065 34°。
2 微位移平台的有限元分析
对柔顺并联平台进行有限元分析,选用的压电陶瓷型号为Pst150/5/7 vs10,其行程为0~0.01 mm。
在三维建模软件中建立微位移平台模型,并将其导入有限元仿真软件中。定位平台材料选择65锰弹簧钢,其密度为7.81 g/cm3,杨氏弹性模量为2.1×1011Pa,泊松比为0.288。对微位移定位平台施加约束,具体仿真结果如下:当上、下层的3个压电陶瓷分别从(0.010 0,0.002 5,0.002 5)到(0,0.007 5,0.007 5)输出位移时,平台沿x轴方向移动,行程为0.053 9 mm,结果如图9(a)所示。

图9 定位平台仿真图
当上、下层的3个压电陶瓷分别从(0,0.002 5,0.007 5)到(0,0.007 5,0.002 5)输出位移时,平台沿y轴方向移动,行程为0.062 3 mm,结果如图9(b)所示。
当上、下层的3个压电陶瓷分别从(0,0,0)到(0.01,0.01,0.01)输出位移时,平台中心沿z轴转动,结果如图9(c)所示。
因为有限元分析软件无法直接表示出仿真结果的转动位移,所以通过标记处两点的位移变化,推导出φ大小:
(14)
式中:l为p点到探测点的距离;Δl为探测点的位移。
仿真结果相对于理论计算结果在x方向的最大相对误差为10.47%,在y方向的最大相对误差为5.03%,φ的最大误差为9.86%。由此可知,误差均在合理范围之内,验证了运动学模型理论分析的合理性,为差动式微位移柔性放大机构的设计奠定了基础。
3 提高精度的方法
使用螺栓将两个定位平台链接在一起,两个定位平台的不同之处在于构件7的截面高度不同,h下=kh上,其中h上,h下分别为上、下层平台构件7的截面高度;k为常数,大于1。
当进行粗定位时,需要同步驱动上下两层定位平台的压电陶瓷;当进行精定位时,单独驱动上层平台的压电陶瓷,下层平台的压电陶瓷保持不动,利用上下两个平台的传动链的刚度差,可产生更精密的微位移。
因为构件7为细长杆,其他构件在形变方向上的刚度远大于构件7,所以上下两层传动链的刚度差主要受构件7的影响。
构件7可视为梁结构,其抗弯刚度为EI,E为上下平台材料的弹性模量,I为截面惯矩。
(15)
式中:b为构件7的截面宽度;h为构件7的截面高度。
则上下平台构件7的抗弯刚度分别为:
(16)

(17)
当同步驱动上下两层定位平台的压电陶瓷时,其末端移动平台的输出位移为u1。如果只单独驱动上层定位平台的压电陶瓷,下层平台压电陶瓷保持不变,根据两个放大机构传动链的刚度比可算出末端移动平台的输出位移u2为:
(18)

4 结果对比
表1为粗定位平台行程的理论计算和模型仿真结果。

表1 粗定位平台行程的理论计算和模型仿真结果
表2为精定位平台行程的理论计算和模型仿真结果。

表2 精定位平台行程的理论计算和模型仿真结果
通过对比结果可知,两者的理论计算和模型仿真结果偏差不大。
5 结束语
本文设计了一种三自由度微位移放大运动平台,其基于压电陶瓷驱动,可实现沿x和y轴的平动以及绕z轴旋转。该平台通过螺栓将上下两个定位平台链接在一起,同时驱动两平台可实现粗定位;利用上下两层传动链的刚度差,单独驱动传动刚度较小的上层平台可实现精定位。该微位移定位平台同时具有大行程和高精度两个特点,弥补了现阶段微位移定位平台的不足。
通过伪刚体模型得到了机构运动简图,对其进行位移分析,得到了平台的行程解,其中x轴行程为-30.1~30.1 μm,y轴行程为-32.8~32.8 μm,转动角φ范围为0~0.065 34°。将解析结果与仿真结果进行对比分析,误差分别为10.56%,5.03%和9.86%,验证了理论分析和仿真分析结果的一致性。