智慧路灯自动控制与测试装置的设计与实现
2023-02-17王鹏举经本钦嵇建波艾志伟
王鹏举 经本钦 嵇建波 艾志伟
(桂林航天工业学院 广西 桂林 541004)
0 引 言
路灯作为城市照明的基础设施,是智慧城市建设的重要组成部分[1]。将普通的路灯设计成能根据环境条件“智慧”地调整亮度,是未来的一个研究方向。为了实现路灯亮度的自动调控及节能的目的,牛萍娟等[2]提出了路灯开启数量根据道路上行驶车辆的车速自动调整的思想,黎山峰等[3]提出“人车到则灯亮,人车走则灯灭”的路灯动态控制理念,林海军等[4]提出了基于神经网络的路灯光照强度自适应算法,文献[5-6]提出了应用模糊PID算法实现路灯的控制。
本文拟从智慧城市建设过程中节能环保及绿色照明的角度出发,应用传感器实时采集路灯周围的光照及污染物浓度情况,根据设定的模糊控制规则算法,动态实时调控路灯的亮度,实现路灯亮度能自动根据其周围的环境状况而进行自动调整的功能,达到智慧路灯及智慧城市建设中节能控制及测试的效果。
1 模糊控制原理
在设计中,路灯的输出光照强度随着周围自然光的改变而缓慢变化,实现实时调整路灯的输出亮度,达到更加人性化及节能的控制效果[7-8],但受控路灯的数学模型难以通过系统辨识或者建立自身属性方程实现。模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术,可以在缺乏被控对象具体数学模型的前提下实现较好的控制效果。模糊控制方式不需要建立受控对象的数学模型,可以根据模糊规则实现对受控对象的控制[9]。因此,在路灯亮度的控制中,可以采用模糊控制器及模糊控制方法实现路灯亮度随自然光照强度的自动调整,所设计的模糊控制器结构如图1所示。
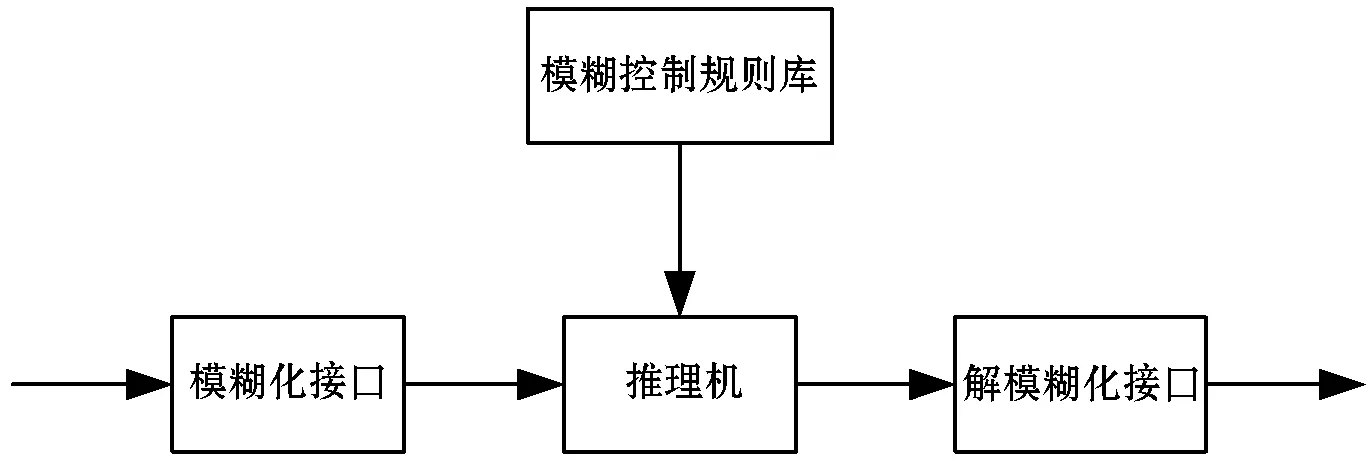
图1 模糊控制器结构
可以看出,模糊控制器共分四部分:模糊化接口、模糊控制规则库、推理机和解模糊接口[10]。模糊化接口的作用是把输入的确定量,依据一定的规则进行模糊化处理,从而得到一个模糊向量并输入到推理机中。模糊控制规则在模糊控制器中是最重要的,是模糊控制器的核心部分,其功能及作用相当于传统控制系统中的校正器,需要通过多次调试,最终得出合适的模糊规则,为推理机提供依据[11]。解模糊化接口的作用是和模糊化接口的作用相反,是将模糊化推理之后输出的模糊值或者结论等效成一个清晰的数值。推理机是根据模糊化接口的输入和制定好的模糊规则,完成最终的推理过程,传递给解模糊化接口,从而实现求解模糊关系,最后获取模糊控制量[12]。
根据以上模糊控制理论,设计中通过光敏电阻采集路灯周围光强的变化、光敏电阻输出电压的偏差、偏差的变化率作为模糊控制器的输入,以电压的变化反映亮度的变化。
实际工作时传感器检测电压的偏差范围为(-1.3~+1.3)V,偏差变化率范围为(-17.33~+17.33)V/s,输出范围为(-5~+5),采样周期为150 ms,设计给定的传感器电压的控制值为2 V。
据此,将路灯的亮度误差e及其变化率ec分别设定在区间[-1.3,+1.3]和区间[-17.33,17.33]内连续变化,通过对其进行离散化,构成由整数0、1、2、3、4、5、6组成的离散集合,表示如下:
|e|=|ec|={0,1,2,3,4,5,6}
这两个集合对应的模糊子集都设定为:
|e|=|ec|={NB、NM、NS、ZE、PS、PM、PB}
NB、NM、NS、ZE、PS、PM、PB这7个模糊集中的元素对亮度来说是非常暗、较暗、偏暗、适中、偏亮、较亮、非常亮[13];对亮度变化速率来说是迅速变暗、较快变暗、渐进变暗、不变、渐进变亮、较快变亮、迅速变亮。
同样设定输出量的论域为:
Po={-3,-2,-1,0,1,2,3}
将其模糊子集也同样设定为:
|e|=|ec|={NB、NM、NS、ZE、PS、PM、PB}
此时即完成了输入量的模糊化过程和输出量的解模糊过程。由于光敏电阻的光线较弱时电阻的变化率较大,光线较强时电阻的变化率较小,依据这个特性,在设置偏差以及偏差变化率的隶属度函数时,在亮度偏小的部分较密集,亮度较大的部分较宽松,模糊规则如表1所示,偏差及偏差变化率函数如图2所示。
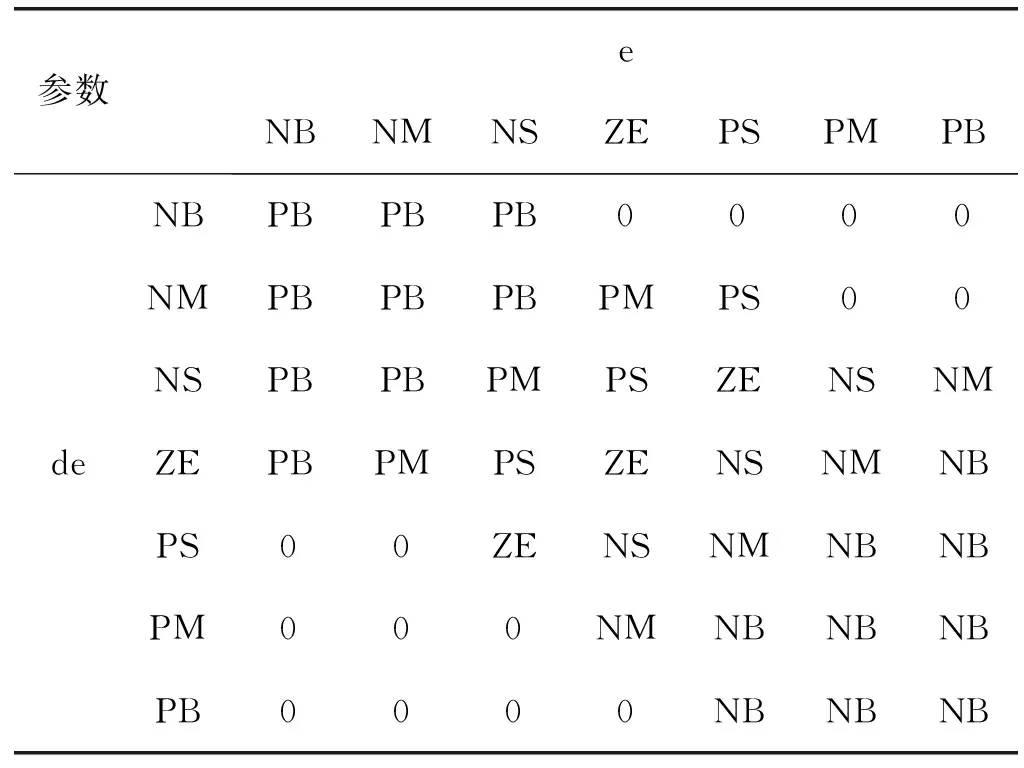
表1 模糊规则表(e:偏差,de:偏差变化率)

图2 偏差及偏差变化率隶属度函数
为了方便计算,将输入数据放大100倍后进行模糊化处理,由此得到的比例因数分别为:偏差(7/130)、偏差变化率(7/1 733)、输出(7/5)。因为一般的解模糊过程计算过于繁琐,影响处理器的处理效率,进而也影响到整个系统的实时性。所以将各隶属度对应的模糊输出数据通过MATLAB软件计算得出,如表2所示,将表的内容写入一个15×15的数组中。计算规则选择最大最小法和加权平均法,在进行到解模糊过程时,通过查找数组可以很快得出相应的输出量,避免了繁琐的计算,在保证控制精度的同时,也兼顾了实时性。
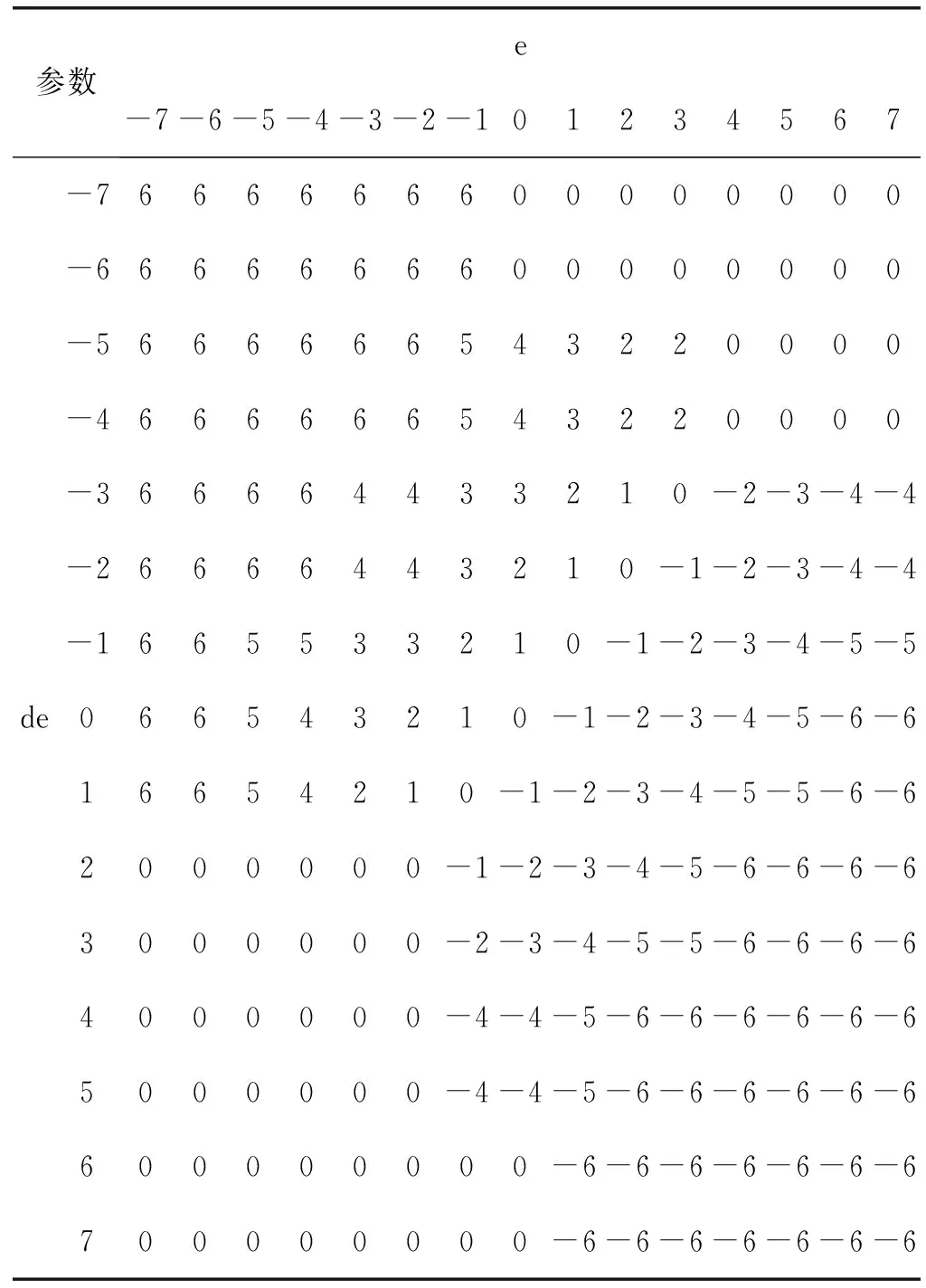
表2 模糊输出查询表(e:偏差,de:偏差变化率)
2 智慧路灯系统设计
2.1 总体方案设计
基于模糊控制理论的智慧路灯总体设计方案如图3所示。该方案由上位机操作界面、路灯控制站及智慧路灯节点三大部分组成。其中,路灯控制站主要包括无线网桥和边界路由器;智慧路灯节点主要包括无线网桥、LED路灯、节点控制器等;上位机操作界面通过可视化软件实现对路灯的远程控制及路灯数据的远程传输。

图3 智慧路灯总体设计方案
2.2 智慧路灯节点
智慧路灯节点是整个方案设计的核心部分,可分为数据采集和数据传输两大部分,其硬件设计如图4所示。

图4 智慧路灯节点设计框图
数据采集部分可以读取路灯当前的电流、电压、亮度、温度、湿度、PM2.5、有毒气体、光照强度、视频图像,同时可以实现路灯亮度的即时调整。数据传输部分是将采集的数据及视频实现远程传输。无线数据传输采用基于IPV6的低速无线个人局域网6LoWPAN(IPV6 over Low power Wireless Personal Area Network)通信协议[14]。该协议基于TCP/IP网络架构,不必进行任何协议的转换,就可以实现与互联网的无缝对接,简化网络拓扑结构。
ARM嵌入式处理器采用低功耗、高性能的32位嵌入式处理器STM32F103芯片[15]。智慧路灯节点的软件采用C语言编写,在软件设计过程中,移植了Contiki操作系统,并基于该操作系统下的用户线程函数的实现进行程序设计,其中基于模糊控制理论的路灯亮度自动调整算法流程如图5所示。

图5 智慧路灯亮度自动调整流程
可以看到,当智慧路灯节点收到上位机操作界面的自动调整指令之后,控制程序将根据采集到的PM2.5、光照传感器数据、设定的模糊规则,进行路灯亮度的自动调整,实现路灯亮度的智能控制及节能的目的。其中,PM2.5比较数值的设定是参照空气质量指数标准,当空气污染较重时,可见度降低,打开路灯以提高道路的照明亮度[16]。
2.3 上位机操作界面
为了实现路灯的远程调控,使其能够直观展示调控效果,完成了上位机操作界面的设计。界面采用VB(Visual Basic 6.0)程序及可视化编程技术进行编写,主要分为网络通信设置、路灯数据查看及路灯亮度控制3大部分。所设计的上位机操作界面如图6所示。其中网络通信部分采用UDP协议与边界路由器、无线桥建立连接;数据查看部分可以查看网络节点中所有节点,查看路灯运行的数据及其周围的环境数据;路灯亮度控制部分设置了手动和自动两种控制方式,并且在设计过程中将“自动调光”和“手动调光”按钮设计为一个按键。因此在自动调光模式下,界面上按钮显示为“手动调光”,当在手动调光模式下,界面上的按钮显示为“自动调光”,方便二者之间的切换。

图6 上位机操作界面
3 实验验证与结果分析
装置的设计最终实现了路灯的智能控制及测试功能,所设计的智慧路灯节点实物如图7所示。

图7 智慧路灯节点实物图
上位机操作界面可以通过手动或自动方式远程调节路灯的亮度,当设置为自动调光方式时,路灯会根据其周围的PM2.5浓度及光照条件自动调整其工作电流和电压,调整LED路灯输出的亮度,自动调光测试结果如图8所示。

图8 自动调光测试结果
改变路灯周围的光照强度,使其光照条件对应非常暗、较暗、偏暗、适中、偏亮、较亮、非常亮7个等级,测试路灯的自动调光效果,测试结果如表3所示。

表3 路灯自动调光数据测试结果
表3的测试结果表明,应用模糊控制理论设计的路灯,能“智慧地”根据其周围的光照条件调整工作电流和电压,调整其输出的亮度。当路灯周围的光照强度逐渐增强时,路灯的工作电流逐渐减小,其亮度也逐渐减弱。如果路灯周围的光照强度非常强,则路灯自动关闭工作电流,并将输出电压降低,实现了路灯亮度的智能化调节及测试的功能。
4 结 语
本文深入研究了模糊控制理论,设计一套针对路灯亮度随自然光自动调节功能的模糊控制规则,应用MATLAB软件仿真计算之后,将结果应用到智慧路灯节点的控制程序中。经过各个功能单元的单独调试以及装置的整体调试,实现了路灯的远程监控及路灯亮度的智能化调节与测试功能。与传统路灯的控制方式相比,采用模糊控制算法的路灯自动调光功能,不仅可以让路灯的照明服务更加科学合理,而且还可以实现城市道路照明更加节能的效果。此外,基于6LoWPAN无线通信协议的智慧路灯系统设计,还可以采集城市中的雾霾、温湿度、有毒气体、提供视频监控数据,为智慧城市的建设提供了基础信息采集的通道和接口,为智慧城市的运行和管理奠定较好的基础,同时也为当前5G技术在智慧城市建设中的推广应用,提供一定的参考价值。
