三维时间片最大纠缠态的最优检测
2023-02-14曹睿袁晨智沈思张子昌范云茹李加睿李浩尤立星周强王子竹
曹睿, 袁晨智, 沈思, 张子昌, 范云茹,李加睿, 李浩, 尤立星, 周强, 王子竹∗
(1 电子科技大学基础与前沿研究院, 四川 成都 610054;2 中国科学院上海微系统与信息技术研究所, 上海 200050)
0 引 言
随着量子信息理论的发展,量子纠缠被认为是一种重要资源[1,2],在量子密钥分发[3]、量子隐形传态[4]和量子密集编码[5]等研究领域都有潜在的应用价值。近年来,高维纠缠态的制备与应用为量子信息科学的发展注入了新的活力[6−9]。相较于二维纠缠态,高维纠缠态能够提供更强的容错能力与信息编码密度[10],还可以显著提高量子密钥分发协议的成码率[11]和信道容量[10,12]。得益于光量子技术的不断改进与非线性光学晶体制备技术的新进展,在光子系统中实现高维纠缠态的方法可以利用光子的空间路径[13−16]、轨道角动量[15,17]、时间片自由度[8,18],以及它们之间的组合来实现[9,19]。
如何实现高维纠缠的最优检测是量子信息领域的热门课题,其中一种较为高效的检验方法是纠缠见证[20−23],其能用比量子态层析更少的测量设置和测量次数来实现对量子态纠缠性质的认证。已报道的高维纠缠检测的实验方法主要基于保真度的纠缠见证算符来实现,但该方案仍存在无法对所有纠缠态进行检测的困难[24]。即使针对能够利用该方案认证纠缠的量子态,其实验过程中所要完成的测量组合也可能不是最优的[22],随着纠缠态的纠缠维度逐渐增加,针对纠缠见证算符的分解也将越来越困难[25]。另一方面,在纠缠源的保真度不够高或者不稳定的情况下,利用基于保真度的纠缠见证算符检测目标量子态的纠缠是非常困难的。为了解决高维量子态的纠缠检测问题,文献[26,27]提出一种新的高维纠缠检测方法,给定任意目标态以及测量基,同时以最小出错概率认证目标态纠缠维度。

1 纠缠与纠缠见证

成立,那么称ρ 完全可分,是一个可分离态;否则,称ρ 是纠缠态。将所有可分态组成的集合用S表示。
另一方面,一个n体纯态ψ ∈H 如果能被分解成

的形式,则称其纠缠维度为D。用SD代表所有可以表示为D维纠缠纯态凸组合的量子态的集合。如果一个态ρ ∉SD,那么它的纠缠维度至少为D+1。
此外,如果一个可观测量W 满足两个条件:1)对于所有的可分离态都有Tr(Wρs) ≥0;2)至少对一个纠缠态有Tr(Wρe)<0,那么它被称为是一个纠缠见证[23]。每一个纠缠态ρe都存在一个与其对应的纠缠见证算符。如果通过对可观测量W 的测量得到Tr(Wρ) < 0,那么依据该纠缠见证算符W 得以确定量子态ρ 是纠缠的。纠缠见证算符最常用的一种基于局部投影算符的分解形式为
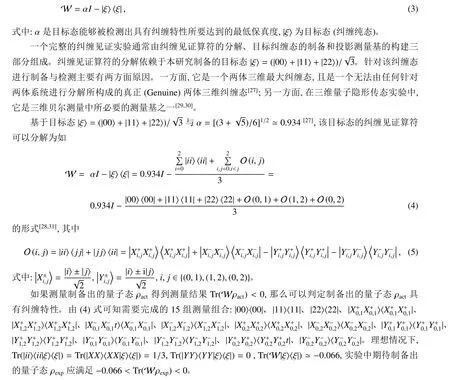
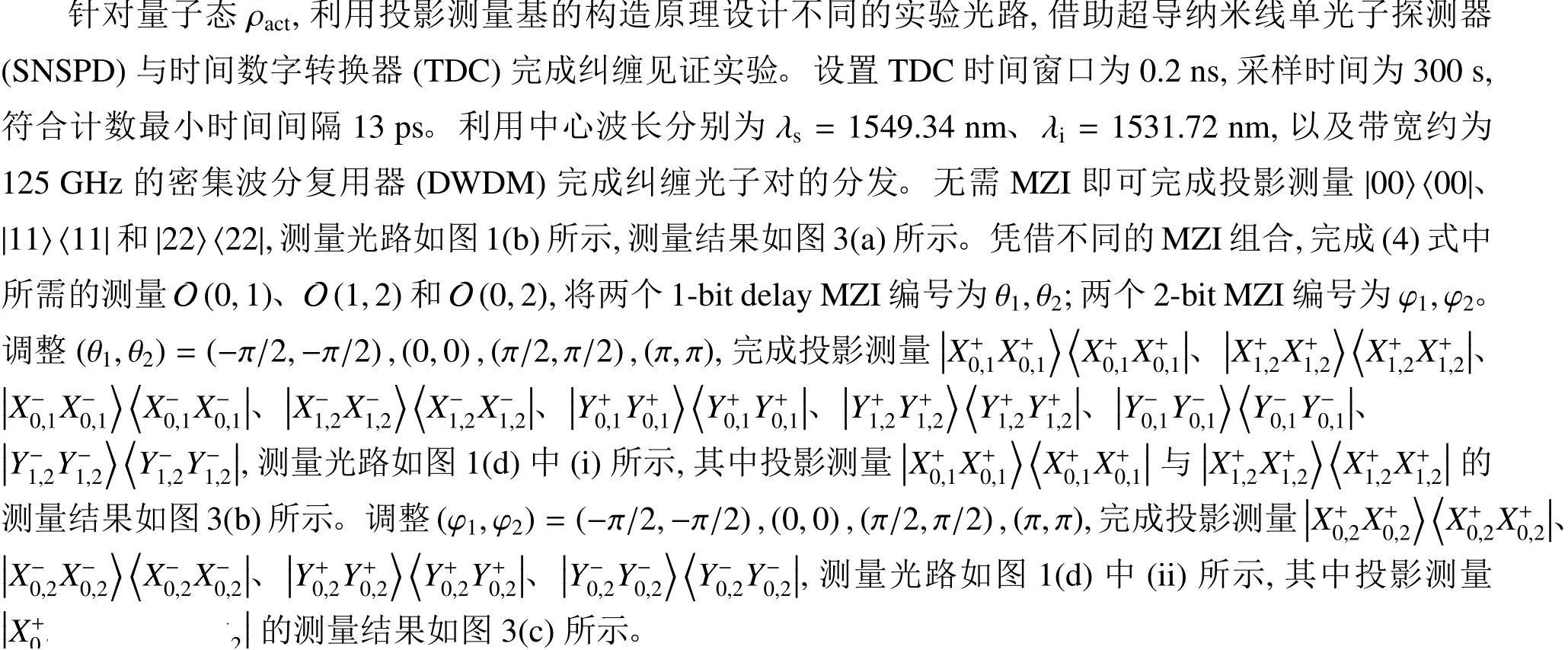
实验装置示意图如图1 所示,制备纠缠光子对的实验光路如图1(a)所示。目标量子态的制备主要分为两部分:泵浦激光信号的产生与纠缠光子对的制备。实验设置中PPLN 波导模块详细性能参数见文献[32]。利用任意波形发生器(AWG)输出脉冲间隔为625 ps、重复频率为100 MHz 的三脉冲电信号与重复频率为25 MHz 的同步信号,将AWG 输出的三脉冲电信号连接微波放大器,通过光电调制器完成对中心波长为1540.46 nm、功率为10 dBm 的连续激光进行强度调制,调制后脉冲激光的峰值功率约为9.08 dBm。将调制后的脉冲激光接入掺铒光纤放大器(EDFA)与可调光衰减器(VOA),并连接99:1 的光纤耦合器对泵浦激光的功率进行调整与监测,利用中心波长λp=1540.46 nm、带宽约为125 GHz 的密集波分复用器(DWDM)抑制EDFA 产生的自发辐射噪声。使用偏振分束器(PBS)实现泵浦激光与PPLN 最佳相位匹配间的偏振对准。在含有噪声抑制滤波器的单根PPLN 波导中,通过级联的二次谐波产生(SHG)与0 型自发参量下转换(Type-0 SPDC)过程产生并滤波选取出波长为1549.34 nm 与1531.72 nm 的纠缠光子对ρact。
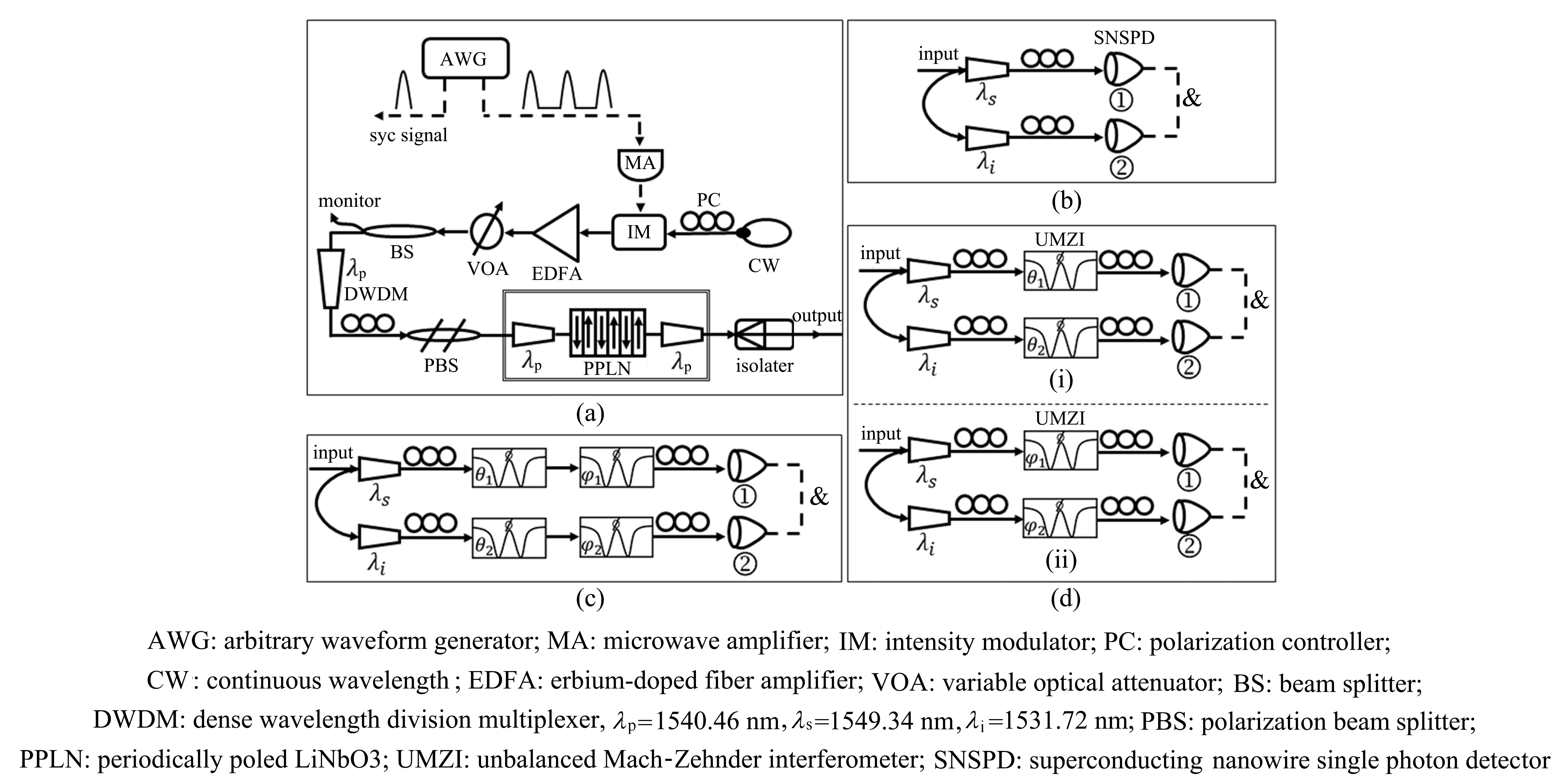
图1 实验光路图。(a)量子态的制备;(b)|ii〉〈ii|的测量方法;(c)、和的测量方法;(d)|、|和的测量方法Fig.1 Experimental setup. (a)Preparing entangled photon-pairs;(b)Implementing the measurement of|ii〉〈ii|;(c)Implementing themeasurementof |and(d)I mplementing the measurement of|and
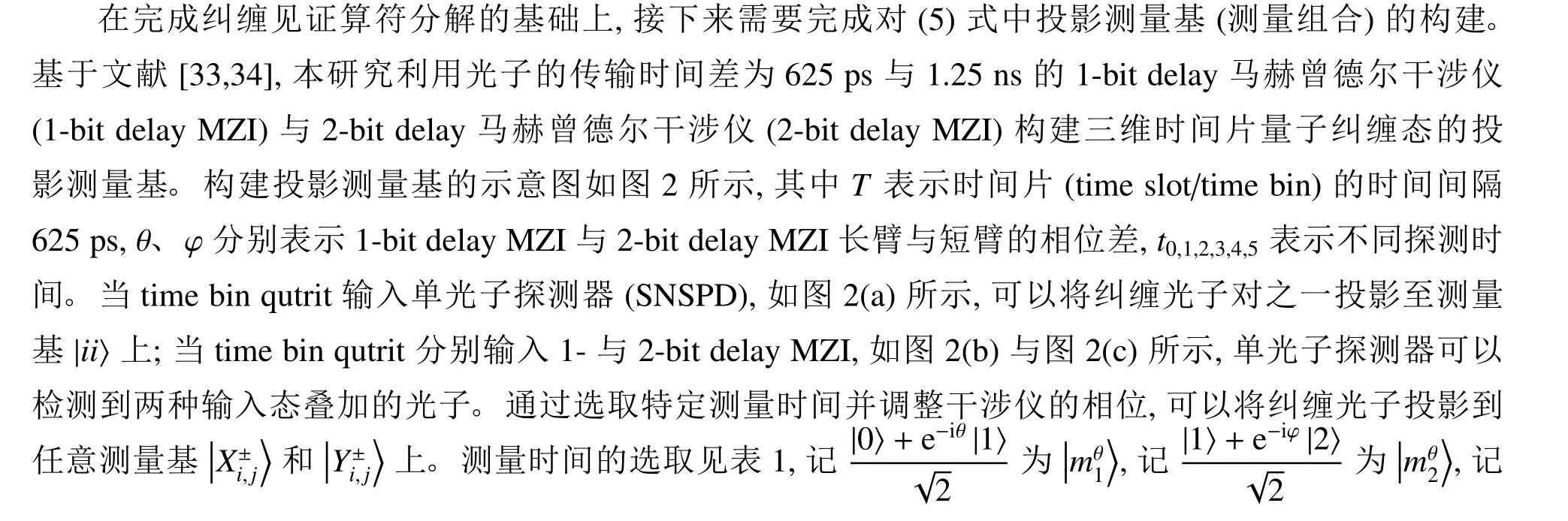

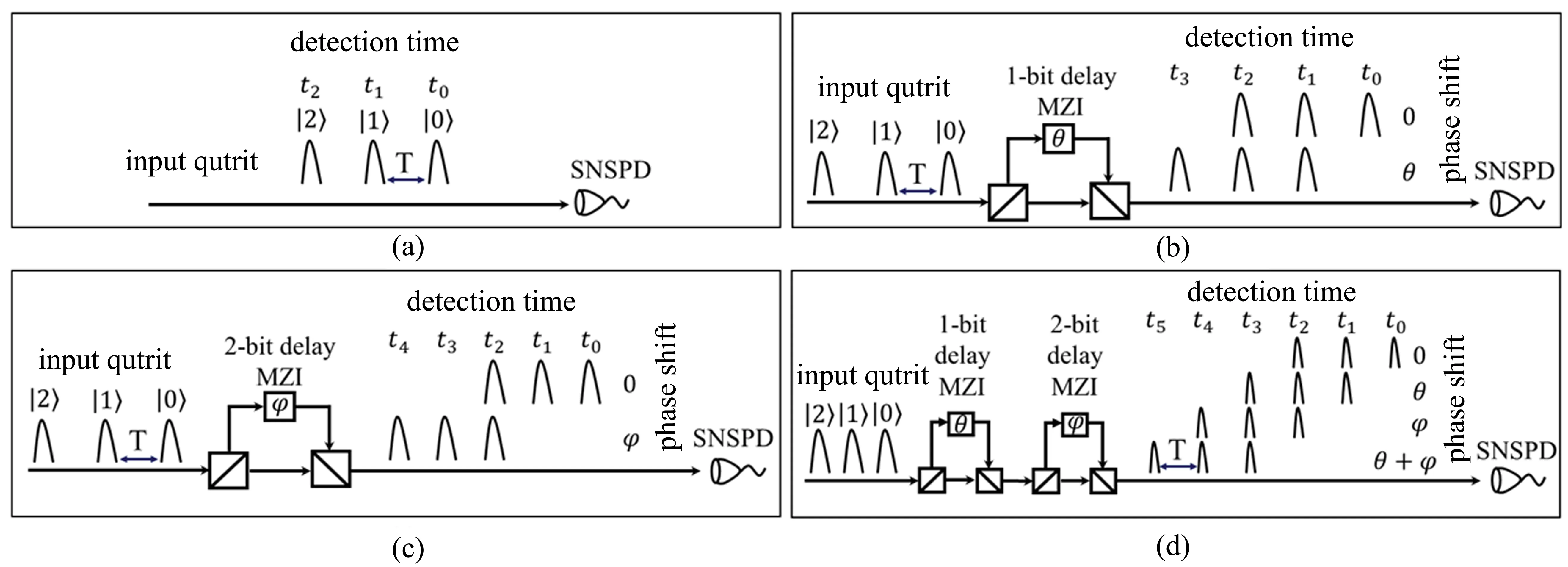
图2 测量算符的构建。(a)测量算符|00〉〈00|、|11〉〈11|和|22〉〈22|的测量;(b)1-bit delay MZI;(c)2-bit delay MZI;(d)1-bit MZI 与2-bit MZI 级联Fig.2 Construction of measurement operators. (a)Measurements of measurement operator|00〉〈00|,|11〉〈11|and|22〉〈22|;(b)1-bit delay MZI;(c)2-bit delay MZI;(d)Cascaded 1-bit MZI and 2-bit MZI

表1 纠缠见证测量算符Table 1 The measurement operators of entanglement witnesses
进行三组实验并计算纠缠见证判别式Tr(Wρact),得到结果如表2 所示。由实验结果可知,传统纠缠见证实验在本研究实验条件下的结果并不稳定,说明制备的量子态ρact并不一定能破坏该纠缠见证。造成此结果的主要原因为每组实验需要完成的测量组合较多,实验进行时间较长,MZI 在长时间通电情况下不可避免地发生相位的偏移,同时调整干涉仪相位时存在回滞效应,这也给测量带来了干扰。另一方面,进行投影测量也会带来计数的损失,环形器的隔离度、光纤接头的连接也都会引入噪声与干扰。
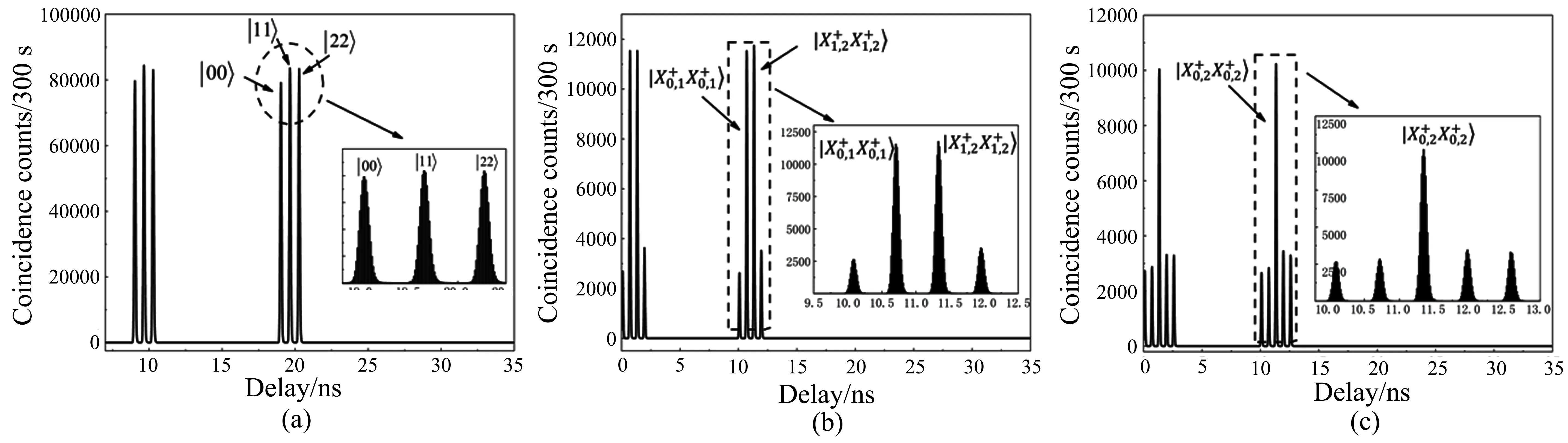
图3 符合计数图。(a)|00〉〈00|,|11〉〈11|,|22〉〈22|;(b)■与Fig.3 Coincidence counts histograms of(a)|00〉〈00|,|11〉〈11|,|22〉〈22|;(b)and
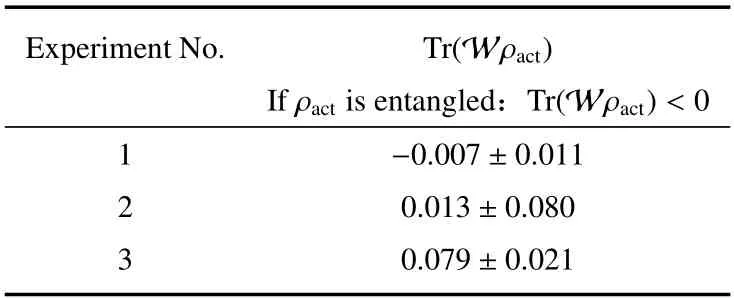
表2 纠缠见证测量结果Table 2 Measurement results of entanglement witness
2 基于优化算法的最优纠缠检测
采用文献[25,26]提出的纠缠维度的检测方案,基于统计学中的假设检验与SDP 优化算法,面对给定任意维度的两体纠缠态和一组局部测量算符,通过该方案可以准确地判定目标纠缠态的纠缠维度。

其中每一个|ψi〉都有D或更小的施密特秩,{λi}满足λi≥0,同时∑iλi= 1。任何不属于集合SD的量子态都至少具有D+1 维的纠缠。令目标态ρAB∉SD,pI,pII∈[0,1],并且根据假设检验的思想定义如下两条规则:1)如果实际量子态σ ∈SD,则通过检测判断其是纠缠态(事件C)的概率最大为pI(弃真错误);2)如果实际量子态σ=ρAB,则通过检测判断其不是纠缠态(事件U)的概率最大为pII(取伪错误)。
通过求解关于最小化pI+pII的半定规划问题,构造出由集合π 中的局部测量算符与满足LOCC 协议的一组最优概率分布{p(i,k,c|j,l),i,k∈{1,··· ,m};j,l∈{1,··· ,d},c∈{C,U}}组成的含有两个结果的POVM 测量。同时得到如果纠缠源每轮实验可以产生目标态ρ,通过该POVM 测量所要达到的最小值w=1 −pII。由此定义新的纠缠见证算符为
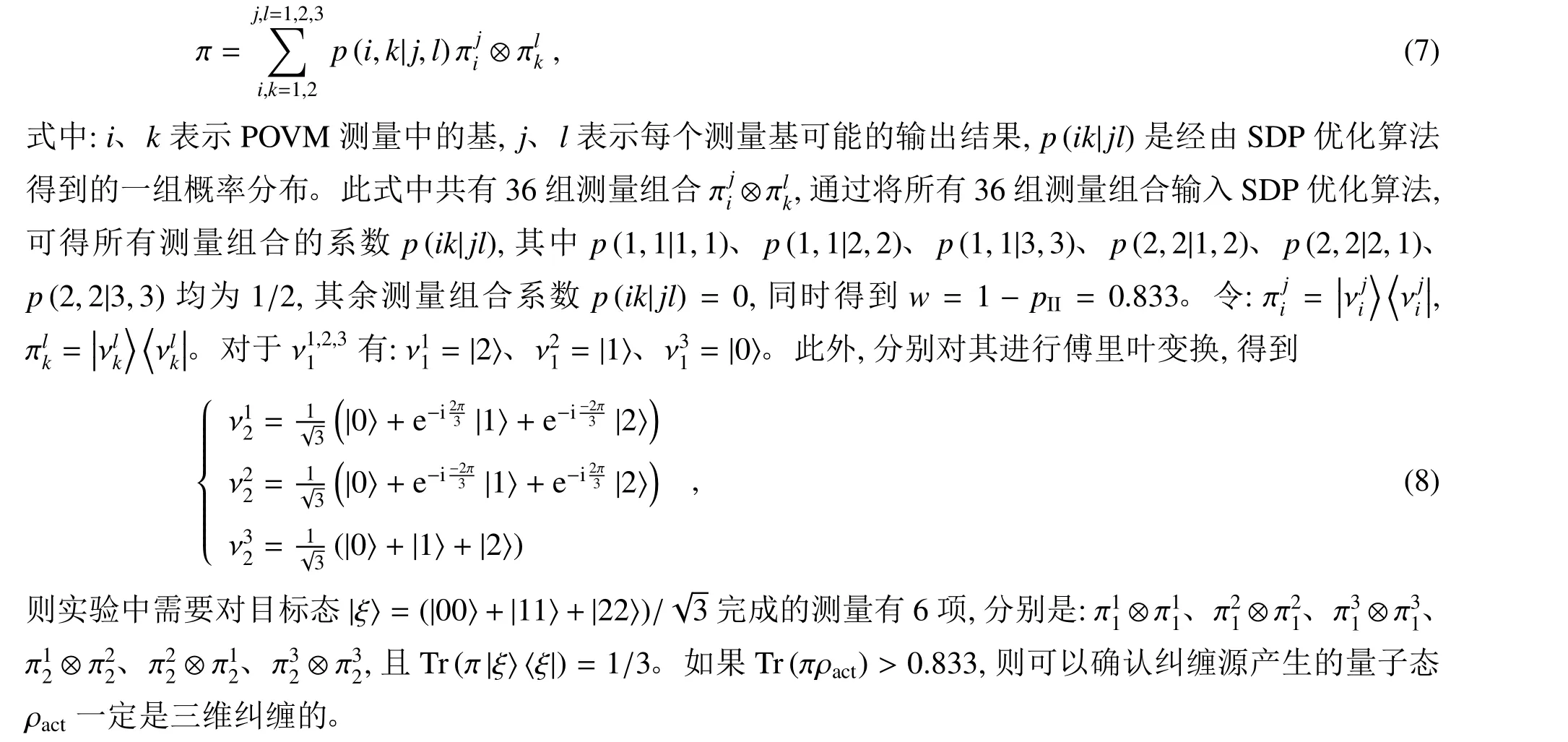

表3 纠缠维度检测的测量算符Table 3 The measurement operator of entanglement dimension detection
针对量子态ρact利用与前文所述纠缠见证实验相同的TDC 实验参数和纠缠光子对的分发模式,完成其纠缠维度的测量。在不引入MZI 的情况下完成投影测量|00〉〈00|、|11〉〈11|和|22〉〈22|,测量光路如图1(b)所示,测量结果如图4(a)所示。
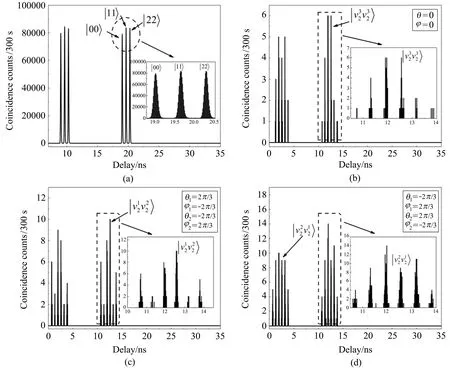
图4 符合计数图。(a)|00〉〈00|,|11〉〈11|,|22〉〈22|;(b)Fig.4 Coincidence counts histograms of(a)|00〉〈00|,|11〉〈11|,|22〉〈22|;

进行三组实验并计算判别式Tr(πρact),得到如表4 所示结果。通过与纠缠见证实验结果的对比可以发现,依据文献[25,26]提供的方法,本节进行的三轮实验均以6 组测量组合完成了目标态的纠缠检测,且由于该组实验进行时间短,测量组合少,无需反复多次调整干涉仪相位,使得测量结果体现出了较为一致的重复性。同时,优化算法本身的限制保证了检测结果的确定性与最优性。
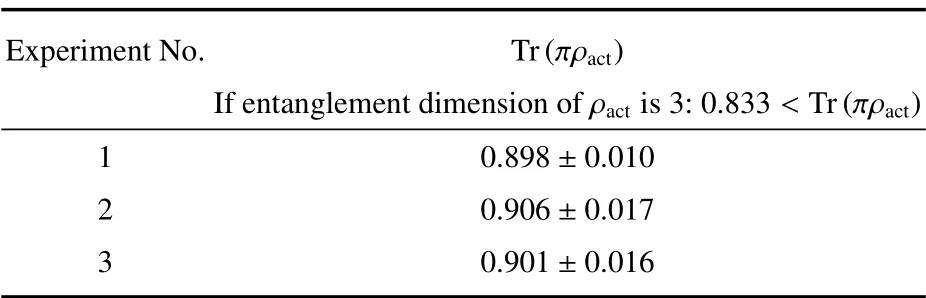
表4 纠缠维度测量结果Table 4 Measurement results of entanglement dimension
3 结 论
在进行纠缠见证实验过程中,不同的量子态制备方式往往具有不同的保真度、量子态产生速率以及采样速率。基于保真度的纠缠见证方案无法将不同的实验条件纳入考量,故无法高效准确地应用于所有可能的物理实验系统。本研究基于文献[25,26]提出的纠缠维度的检测方案,在考量实验条件并最优化测量组合的基础上,给出了一套纠缠维度的检测方案。实验结果表明,该方案测量组合数目相较纠缠见证方案减少约一倍,且能够确定目标纠缠态的纠缠维度,同时对噪声容忍度更高,实验难度更低。面对量子纠缠在量子通信领域的重要作用,这种能够考量不同实验条件并能够确定纠缠维度的方法使得大规模量子系统子系统之间的相互协作成为可能,是传统纠缠检测方案的重要补充。
