一种新型支气管镜手术机器人系统
2023-02-12占雄张飘艺周刚陈丽宏苏永新朱祥王家寅何超
【作 者】 占雄,张飘艺,周刚,陈丽宏,苏永新,朱祥,王家寅,2,何超
1 上海微创医疗机器人(集团)股份有限公司,上海市,200031
2 同济大学 电子信息工程学院,上海市,201804
0 引言
中国肺癌发病率及死亡率居所有恶性肿瘤之首[1-2]。2020年,《全球癌症统计报告》的数据显示,肺癌占中国癌症新发病例总数的17.9%,远超其他癌症。尽管低剂量电子计算机断层扫描(low-dose computed tomography,LDCT)的应用提高了肺癌的早期检出率且降低了死亡率,但单从影像上判断大多数肺外周结节的良恶性仍很困难[3],导致因传统胸腔镜定位失败而转为开胸手术的比例高达54%[4]。此外,由于缺少导航、定位不准确和手动操作的不稳定性[5],传统气管镜手术的诊断率相对较低[6]。因此,开发具有精准导航和柔性内窥镜的支气管镜手术机器人系统对于肺外周结节的早期筛查与诊治具有重要意义。
美国食品和药物管理局(Food and Drug Administration,FDA)于2018和2019年批准了两款用于肺结节导航与活检手术的机器人[7-10],分别为强生的Monarch平台和直观外科的Ion系统。这两套系统分别使用电磁传感和形状光纤进行导航,均采用自研机械臂和支气管镜导管。其中,Monarch平台的导管由6 mm直径的鞘管和4.2 mm直径的内支气管镜组成,而Ion系统的支气管镜直径为3.5 mm;在诊断率方面,临床统计数据显示,Monarch平台的诊断率为70%左右,而Ion系统超过了80%[11]。2021年,Ion手术机器人进行了2950台手术,装机量为129台;而Auris Health的数据显示,Monarch已经完成了超10000台支气管镜手术。
尽管如此,支气管镜手术机器人系统尚存在若干关键技术问题亟待研究和突破:①如何设计研发出纤柔且可靠的支气管镜导管,从而实现深层肺支气管可达?②如何提高机器人系统的集成度,实现位置与视觉双重导航?③如何降低传统气管镜手术[12-15]的操作复杂度,实现支气管镜导管的直观操作,减少学习时间,减轻医生操作负担?
截至目前,国产支气管镜手术机器人尚未有产品批准上市,而进口产品价格昂贵,无法满足各级别医院的需求。为解决以上问题,本团队研制了一种新型支气管镜手术机器人系统,系统具备能实现大角度弯曲的纤柔支气管镜导管,能在电磁[16-17]和内窥视野双重导航下进行支气管活检;使用手柄进行支气管镜控制,操作简单直观;提出了导丝弹性补偿算法,提升了导管控制精度。
1 支气管镜手术机器人系统构成
本系统由手术台车、医生台车、磁导航系统、医生触控屏、机械臂、控制手柄等组成(见图1)。

图1 支气管镜手术机器人系统构成Fig.1 Structure of bronchoscopic robotic surgical system
手术台车是本机器人系统的主体部分,主要包括:①多自由度冗余机械臂用于支撑、推进和后撤内窥镜导管;冗余自由度设计使得机械臂的构型调整更加灵活,方便支气管镜导管更顺畅地进入肺支气管,减少摩擦阻力;合理的关节设计抵消了部分机械臂自身重力,使得机械臂手动调整更加轻松;支气管镜导管最大进给行程超过650 mm,满足了对肺外周结节的诊疗需求;②主触控显示屏用于显示手术进度和内窥影像以及人机交互式全方位查看肺支气管三维模型、导航路径、肺结节等。
医生台车为手术台车显示和操控功能的延伸,拓展了本机器人系统的空间布局,方便在狭窄的手术室内对机器人进行灵活摆位;此外,方便进行远程遥操作手术,降低了医生的辐射暴露和医患交叉感染的风险。
磁导航系统为传感系统,能在术中实时反馈支气管镜导管的当前位置和姿态信息,为后续的实时配准、图像导航和导管运动控制提供了数据基础。
支气管镜导管是本系统的关键核心部件,包括可控弯曲部和主软管(被动弯曲)(见图2(a))。其中,可控弯曲部[18]集成微内窥镜头、光源、电磁传感器等;为满足肺外周结节活检需求,以支持活检钳/刷、超声探头等设备通过;导管蛇骨采用镂空结构,相较于模块化分段蛇骨结构,结构阻尼较低,因而导管弯曲刚度更小,弯曲形状更加均匀,且蛇骨本身给导管增加了回弹性;为了实现导管的大角度弯曲,蛇骨通体采用超弹性镍钛合金材料。此外,为了提升蛇骨结构的可靠性,还开展了蛇骨结构数值仿真优化研究[19-20]。本项研究的难点在于:①镍钛合金材料的超弹特性使得蛇骨在弯曲时会产生较大的弹性变形,非线性影响不可忽略;②蛇骨结构尺寸比例悬殊。该蛇骨为薄壁长杆结构,导致需要在数值仿真模型不同区域选择合适的网格大小,从而使数值结果能真实反映蛇骨导管本身的真实力学特性。因此,通过实测镍钛合金材料本构数据,自定义超弹性材料属性,然后进行非线性有限元数值计算,仿真结果如图2(b)所示。蛇骨的弯曲角度极限接近270°,弯曲形状均匀。此外,由应力云图可以看出整根蛇骨,特别是弯曲梁根部的危险点处均无明显的应力集中现象,应力分布均匀,因此该蛇骨导管弯曲角度大,结构可靠。奥林巴斯等手持式气管镜通过末端蛇骨的平面内弯曲和整体旋转实现手术空间操作。与之不同的是,本支气管镜导管运动主要通过俯仰和偏摆2个自由度的弯曲来实现,不仅可以控制导管末端可控弯曲部完成手术空间操作(见图3),还避免了手术过程中主软管的频繁旋转,减少了对支气管树的摩擦损伤,也减轻了医生的操作负担。为了实现支气管镜的该种运动模式,导管内嵌金属导丝,通过协同驱动导丝能实现导管可控弯曲部360e 全方向和超180e大角度弯曲,这为位于肺上叶等难以到达的肺外周结节的诊疗提供了可能。除此之外,通过俯仰和偏摆2个自由度的复合运动,导管的位姿控制可以实现一步到位,无须分解为弯曲和旋转两步完成,简化了手术操作。
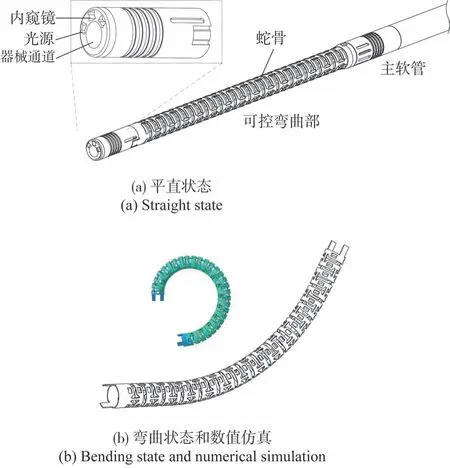
图2 支气管镜导管Fig.2 Controllable bending part of bronchoscope
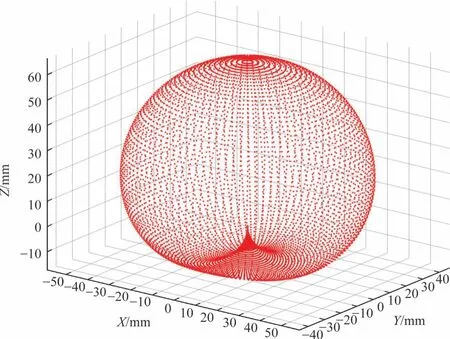
图3 支气管镜导管蛇骨的工作空间Fig.3 Workspace of bronchoscope catheter
控制手柄用于操控支气管镜前进/后退和弯曲。导管弯曲由手柄摇杆控制,支持360e 全方向弯曲。使用手柄操作有如下优势:①手柄操作简化了复杂的气管镜操作,结合实时内窥影像,使得手术操作直观易上手,大大缩短了医生的学习时间,提升了手术效率;②手柄操作和机器人系统使得远程遥操作成为可能,能有效降低手术过程中的辐射暴露量和医患感染;③机器人系统控制更加稳定,能有效避免人手抖动对手术定位准确性产生不利影响。
呼吸贴片粘贴于患者胸部,用于患者呼吸运动监测,为配准算法提供实时数据支持,提高图像导航准确率。
除此之外,本系统还包括:①规划软件,用于术前肺部支气管模型的分割重建、肺结节识别、路径规划等;②导航软件,提供人机交互导航界面、引导手术准备(包括机器人摆位、自检等)、集成配准、呼吸补偿等算法;③运动控制软件,用于支气管镜导管和机械臂的运动控制、周边硬件设备(包括不间断供电电源、LED、蜂鸣器)控制、系统故障监测等。
综上,本研究充分考虑了支气管镜活检术的临床痛点,采用电磁与视觉导航相结合、手柄遥操作直观控制、人机交互图像引导、支持大角度弯曲的蛇骨导管,且其可靠性通过数值仿真模型进行了优化和验证。
2 系统控制方法
2.1 工作原理
肺支气管腔为树形拓扑结构,分岔繁多,各级结构相似性高。仅依靠CT影像操作,很容易丢失当前位置,难以到达目标肺结节,手术效率低。为此,需要建立术中导航系统,对医生的手术操作进行引导。支气管镜手术机器人系统工作原理如图4所示,主要分为术前和术中两大部分。
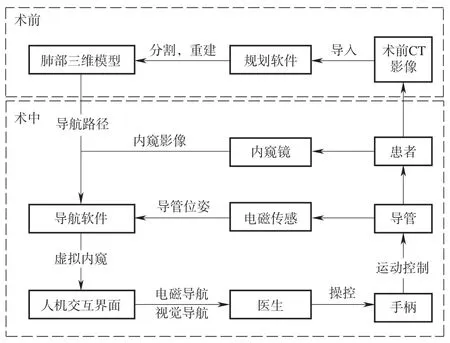
图4 支气管镜手术机器人系统工作原理Fig.4 Working principle of bronchoscopic robotic surgical system
术前,通过CT断层扫描患者肺部,获取肺部二维CT影像集。然后,将该DICOM格式影像数据导入规划软件,进行肺部支气管等组织的图像分割,重建患者肺部三维模型。基于此三维模型,确定患者肺部结节的具体位置,然后以此结节为目标点,自动规划出由肺主气道连接目标结节的支气管路径,以此作为导航路径。
术中,导航软件融合三维模型和导航路径,电磁传感器实时采集的导管末端位姿和内窥镜真实影像等数据信息,将患者肺部与三维肺部模型进行配准。配准完成以后,虚拟内窥视角下的支气管模型图像将与真实内窥镜返回的影像一致。因此,可以利用在肺部三维模型上生成的导航路径对医生的实际操作进行引导,从而准确迅速地到达目标结节,实施活检或消融治疗。在导航过程中,人机交互界面实时更新展示虚拟内窥和真实内窥影像。通过将两者进行比较,医生可以确认当前导航引导的正确性,并操作手柄控制导管进行下一步运动。
医生通过手柄控制导管运动,运动控制逻辑如图5所示。通过操控手柄按钮,生成导管运动指令,再进行坐标变换,生成导管的期望位姿。然后通过导管逆运动学和电机控制器,生成电机的角位移,最终下发给电机执行,拉动导丝运动,实现导管弯曲。导管运动后,会引起内窥镜视野的改变,医生根据视野变化进行下一步运动决策,继续操控导管运动。
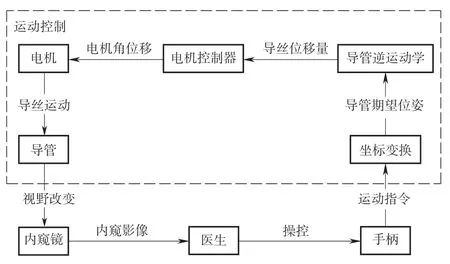
图5 运动控制逻辑Fig.5 Motion control logic
在手术过程中,为进一步提升支气管镜导管操控的精准度,提出了导丝弹性补偿算法。
2.2 导丝弹性补偿
如前所述,本支气管镜导管的各向弯曲由内嵌的导丝牵拉控制,导丝通常为金属丝,比如钨丝、钢丝等。为了满足更深部肺部组织诊疗的需要,一方面,支气管镜导管一般倾向于设计得更加纤细,这就限制了导丝直径的选取;另一方面,纤细导丝具有更低的弯曲刚度,因而导管整体的弯曲变形性能更优。然而,选用小直径的导丝也会产生负面影响,比如导丝拉伸刚度不足。低抗拉刚度使得导丝在承受相同张力荷载的情况下发生较大的弹性变形。而且,弹性变形量随着张力的改变而动态改变:张力越大,弹性变形量也越大。因此,如果在导管运动控制中,不考虑导丝弹性变形,导管的弯曲角度控制会产生较大的损失,达不到预期控制效果,最终影响手术的直观操作。为此,需要辨识导丝上受到的张力大小,然后进行导丝弹性形变量的实时动态补偿。
导丝的形变量与导丝所受实际拉力密切相关,因而如何获取导丝上的拉力是关键。现有的获取导丝张力的方案有多种,比如:①通过应变片测应变间接获取;②电机端添加关节力矩传感器直接测量;③由相应电机输入电流观测等。其中,前2种方案都需要在系统中添加额外的设备来实现,一方面会增加结构复杂度和降低系统可靠性;另一方面会增加制造成本。因此,考虑到设计紧凑性和结构可靠性,本系统采用方案③设计导丝拉力观测器,利用电机的输入电流实时观测导丝所受拉力,然后根据导丝拉伸刚度换算出弹性变形量,并在控制上做实时补偿。
导管-导丝-电机驱动模型如图6所示,电机带动导丝轮转动,导丝绕在导丝轮上,导丝位移从而带动导管可控弯曲部弯曲。由力与运动的关系可以建立如下电机转动动力学式:
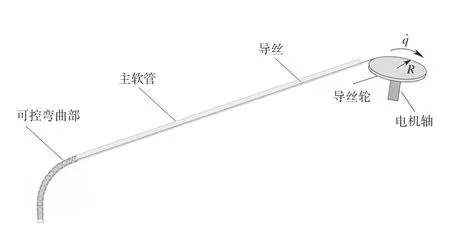
图6 导管-导丝-电机驱动模型Fig.6 Drive model of catheter-tendon-motor

式中:τm为电机输入力矩,τm=ktIinput,其中kt为电机扭矩系数,Iinput为电机输入电流;Jm为电机轴的转动惯量;分别为电机轴角加速度和速度;D为电机轴黏性摩擦系数;τmf为电机轴库仑摩擦力矩;R为导丝轮半径;τt为导丝张力;ft为导丝弹力,ft=kx,k为导丝的弹性模量,x为导丝因受拉力作用产生的弹性变形量;τf为导丝与导丝通道内壁之间的摩擦力。
由以上动力学方程求解出导丝张力ft,即:

式中:ωc为一阶低通滤波器LPF=的截止频率;该低通滤波器的目的是滤除速度反馈中的高频成分;导丝张力观测器如图7所示。
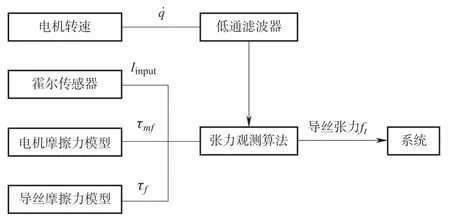
图7 导丝张力观测器Fig.7 Tension observer of the tendon
将实时观测到的导丝张力ft输入导丝弹性补偿单元(见图8),得出导丝因受拉力产生的弹性变形量x,再与导丝的期望位移相加,得到修正后的导丝位移,通过PID控制器计算出相应电机角位移量,并下发电机执行,从而完成导管位姿的精准控制。测试数据表明,导丝弹性补偿的角度约为导丝位移指令的1/10~1/5,因而弹性补偿可以有效减少导管弯曲角度的损失。
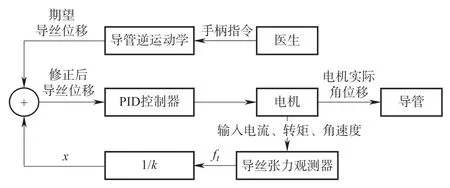
图8 导丝弹性补偿算法Fig.8 Elasticity compensation algorithm of tendons
3 临床和动物试验
目前本系统已成功完成全国首例国产机器人辅助经支气管镜肺结节活检术[21],如图9(a)所示。术前,利用患者肺部CT图像生成三维高精度肺支气管模型,并基于该模型生成到达目标结节的导航路径;术中,医生能快速适应手柄的控制方式,并能在视觉(见图10)和电磁双重导航下,独立熟练控制导管沿导航路径抵达目标结节,成功完成活检,并进行了现场细胞学快速评价,确定活检成功,达到预期的诊断目的。术后,患者无明显不适,恢复快速。

图9 机器人辅助经自然腔道手术场景Fig.9 Scenes of robotic natural orifice translumenal endoscopic surgery
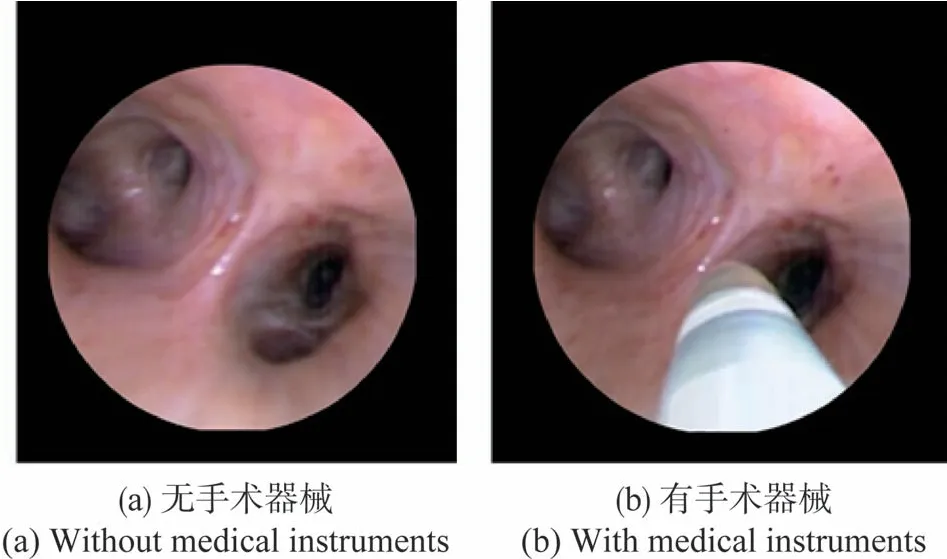
图10 支气管镜视角下的患者支气管内部Fig.10 Endoscopic view of the patient's bronchus
除此之外,截至目前,本系统总共累计完成8次动物(活体猪)试验,支气管镜导管能顺利到达包括需要大角度弯曲的肺上叶支气管。通过训练与适应,可在0.5 h内快速掌握手柄操作,显著缩短经支气管活检术的学习时间。临床与动物试验的顺利开展有效验证了本系统在高集成度大角度弯曲导管设计及其精准控制、视觉与电磁双重导航、直观易用的远程手柄操控(见图9(b))等方面有突出优势与临床应用价值。
4 结论与展望
本支气管镜手术机器人系统的创新性与临床应用价值体现在:
(1)高集成度大角度弯曲导管设计及其精准控制。支气管镜导管集成微内窥镜和电磁传感器;采用超弹材料镂空一体式结构,并通过数值模型进行了结构仿真优化,可以实现极限角度接近270e 弯曲;针对导管结构,设计了导丝弹性补偿算法,提升了导管控制精度与操作效率。
(2)视觉与电磁双重导航。基于电磁传感器和微内窥镜,术中医生可以在电磁导航引导下,结合实时支气管腔内影像,对导管定位与运动进行相互验证,且增强了操作的真实性。
(3)直观易用的远程手柄操控。系统采用手柄控制,简化了支气管镜操作,减轻了医生操作负担,缩短了学习周期;手柄操作避免了手部抖动对定位精度的影响,提升了操作稳定性;远程手柄操作方式还减少了辐射暴露时间和医护感染率。以上特点在临床与动物试验中都得到了有效验证。
虽然本系统设计的目的是满足传统支气管镜活检手术的需要,但由于经自然腔道手术之间的相似性,比如机器人系统形态、柔性机械臂设计与控制、电磁与视觉导航技术等,本系统很容易拓展到其他经自然腔道的治疗,如消化道、泌尿、生殖系统等。此外,消融技术及其与本系统的集成也是一个重要的研究方向,从而可实现集诊断与治疗于一身的肺结节诊治一体化平台。
