近年手术机器人的发展
2023-02-12杨丽晓侯正松唐伟朱思南鲍奇童佳斌丁秀文
【作 者】 杨丽晓,侯正松,唐伟,朱思南,鲍奇,童佳斌,丁秀文
海军军医大学第一附属医院,上海市,200433
0 引言
医疗机器人是医学工程最前沿的发展方向之一。医疗机器人是指应用于医院、诊所的医疗或辅助医疗的半自主或全自主工作的机器人[1]。根据应用场景,具体可以分为手术机器人、康复机器人、辅助机器人和医疗服务机器人四大类。目前医疗机器人发展主要集中在手术机器人领域。按照应用场景,手术机器人分为腔镜手术机器人、经自然腔道手术机器人、骨科手术机器人、神经外科手术机器人、泛血管手术机器人和专科手术机器人[2]。机器人手术比传统手术具有明显优势:①通过精确的定位和稳定的手术姿态能够完成灵活精细的操作,提高手术的精确性和安全性;②通过提供适合人体力学的操作环境和舒适的工作环境,可降低医生的工作强度,减少医生和患者的辐射;③可实现远程操作,缓解医疗资源分配不均的矛盾和减少传染性疾病的传播。
相关机构数据预测,全球医疗机器人市场规模在2025年有望突破127亿美元,相比2020年59亿的市场规模,年增长率为16.5%[3];我国医疗机器人市场正以高于30%的速度稳步增长,预计到2025年,我国医疗机器人市场将达到249.91亿元[4]。国家从顶层政策、“绿色通道 审批和医保支付3个方面鼓励支持手术机器人的发展。2019年11月,国家发改委等15部门单位联合印发《关于推动先进制造业和现代服务业深度融合发展的实施意见》,指出重点发展手术机器人、医学影像、远程诊疗等高端医疗装备[5]。2021年12月工信部联合10部门单位联合印发《“十四五 医疗装备产业发展规划》,将腔镜手术机器人、骨科手术机器人、神经外科手术机器人、口腔数字化种植机器人和眼科手术机器人等智能手术机器人作为重点医疗装备,提出供给能力提升行动[6]。目前多款国产手术机器人作为国家创新医疗器械通过特别审查申请,进入 绿色通道 审批,明显缩短了审批周期。上海微创医疗机器人(集团)股份有限公司等多家企业的产品通过国家创新医疗器械审批 绿色通道 获批[7]。2021年4月,上海市将Da Vinci手术机器人 前列腺癌根治术、肾部分切除术、子宫全切术和直肠癌根治术纳入医保报销范围[8]。2021年8月,北京市将 机器人辅助骨科手术”(医保甲类)作为辅助操作获得政府定价,并与 一次性机器人专用器械 共同纳入医保支付目录[9]。
1 腔镜手术机器人
腔镜手术机器人用于软组织手术,包括三维高清影像系统、主从遥控操作系统和外科医生控制台,通过操作系统对机械臂的精准操控实现复杂手术操作[10]。腔镜手术机器人是目前技术最成熟和使用最广泛的手术机器人,具备创伤小、精细度高和灵活性高等显著优势,主要应用于泌尿外科、妇科、心胸外科和普外科[11]。本节主要报道8款腔镜手术机器人代表产品(见表1)。
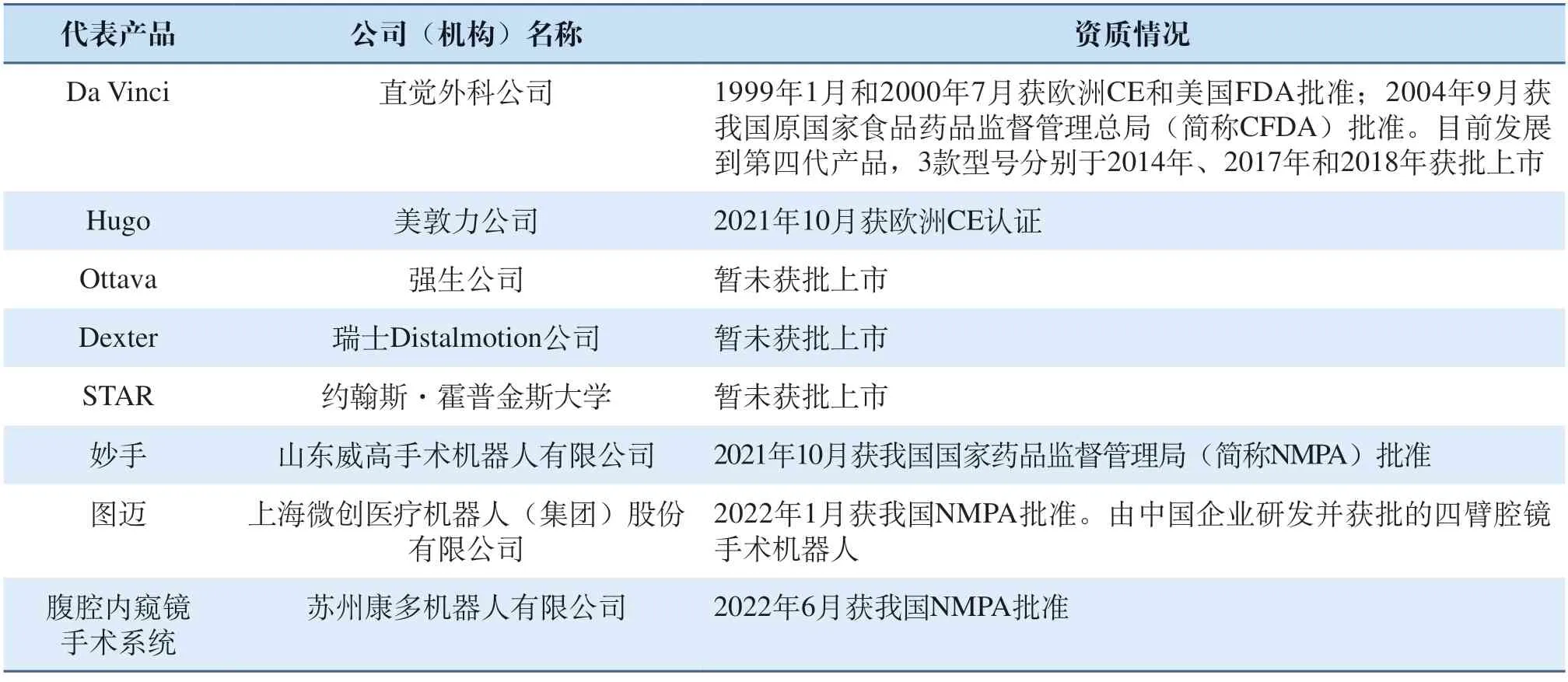
表1 腔镜手术机器人代表产品Tab.1 Representative products of endoscopic surgical robots
1.1 国外腔镜手术机器人
Da Vinci手术机器人主要由医生控制台、床旁机械臂系统和成像系统组成(见图1)[12],是目前全球最成功及应用最广泛的手术机器人。至今已经研制了4代,2014年上市的第四代系统Da Vinci Xi,能够完成从减肥手术和疝气修复到心脏搭桥和前列腺切除多种手术;2017年上市的第四代系统Da Vinci X保持了Da Vinci Xi基本功能,进行了相应简化,设备价格明显降低,利用通用模块可进行功能扩展;2018年上市的Da Vinci SP可实现从单一的端口或切口进入[13]。Hugo手术机器人采用模块化的设计,每个机械臂都安装在单独的手术车上,末端执行器可兼容多种现有器械的组合,使用更加灵活,可明显缩短操作者的学习周期[14]。Ottava手术机器人搭载6个与手术台结合的机器手臂,手臂集成于手术台上,可明显提高手术操作的灵活性,并采用零占用空间的设计,优化手术工作流程[15]。Dexter手术机器人称为 按需机器人”。该机器人通过两个铰链式连接的精准机械臂辅助医生完成手术操作,可集成到现有的腹腔镜设置和工作流程中;可兼容所有腹腔镜设备、发生器和3D成像系统;可快速安装和拆卸,实现在手术室之间快速移动,具有较强的灵活性和兼容性。Dominik Bhlen于2022年6月使用Dexter成功完成了首批泌尿外科手术[16]。2022年1月Science子刊报道了STAR智能组织自主机器人。无需医生的指导,STAR机器人对猪的软组织进行了腹腔镜手术,自主完成肠道两端的重新连接。该机器人通过机器人手臂上的3D摄像头获取图像,可感知机器人在体内的深度,并绘制患者腹部内部变化的情况,缝合的过程中使用定制软件控制机器人完成自动缝合操作[17]。
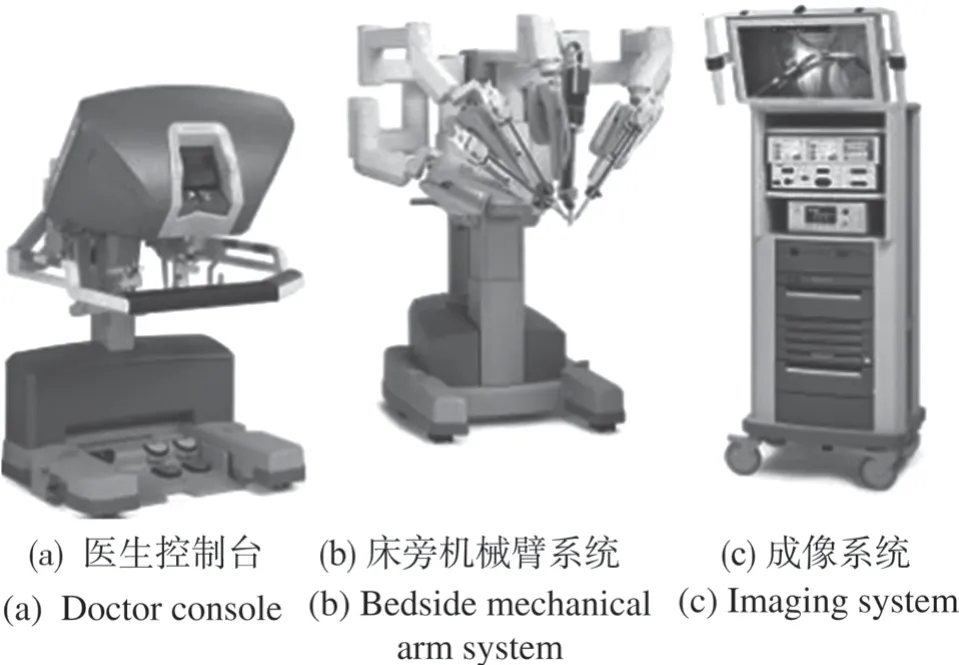
图1 Da Vinci手术机器人组成[12]Fig.1 Composition of Da Vinci surgical robot
1.2 国内腔镜手术机器人
妙手手术机器人通过7 个自由度的机械臂和可实现540 e 末端旋转的手术器械,可以精准地复现医生的手术动作,并实现远程操作[18]。青岛大学附属医院于2020 年9月使用妙手腔镜手术机器人完成了世界首台5G远程机器人辅助人体腹腔镜手术[19]。图迈手术机器人搭载全球首个腔镜手术机器人力觉感知组件沉浸式防护,施术医生头部离开时自动锁定多层安全防护架构,可保障系统安全;搭载4臂悬吊式,适用于多种术式体位和单孔腔镜手术。上海东方医院团队于2019年使用图迈机器人完成了首例国产机器人前列腺癌根治手术[20]。苏州康多机器人有限公司的腔镜手术机器人的机械手臂有11个自由度,末端可以装配多种手术器械,快速提升我国机器人手术临床应用水平。北京大学第一医院于2022年4月使用该腔镜手术机器人完成了世界首次跨运营商、跨网域的 5G+固网专线 多点协同远程临床实时交互教学手术[21]。
目前国产多款腔镜手术机器人获我国NMPA批准,发展迅速,并具备了一定自主研发能力。腔镜手术机器人主要优势集中在具备并提高医生的手功能。国内妙手、图迈和康多腔镜手术机器人的基本结构借鉴了Da Vinci手术机器人,四者结构类似。国外Hugo手术机器人、Ottava手术机器人和Dexter手术机器人等新型腔镜手术机器人正朝着便携式、可拆卸组合式和高度兼容式发展。STAR手术机器人对机器人自主完成手术进行了前沿试验探索,可独立完成手术。
2 经自然腔道手术机器人
经自然腔道手术机器人用于软组织手术,比腔镜手术机器人发展缓慢。其优势是可以实现人体表面不留有切口,更大程度减轻手术创伤[22]。
Momentis Innovative Surgery公司的Hominis经阴道手术机器人于2021年3月获美国FDA批准,是目前第一且唯一获FDA批准的经阴道手术机器人。该机器人通过配置微型人形手臂、肩部、肘部和腕关节,能够精准复制外科医生手的运动和能力,完成良性子宫切除术、输卵管切除术、卵巢切除术和卵巢囊肿切除术,实现更少的疼痛、更低的感染和更快的康复,并且几乎没有可见的疤痕。HCA Florida Kenall Hospital和The Women’s Hospital at Jackson Memorial于2022年6月使用Hominis经阴道手术机器人完成了美国首例机器人经阴道子宫切除手术[23]。
目前尚未有经自然腔道手术机器人获得我国NMPA批准,国内相关研究报道尚不多。主要原因是经自然腔道手术起步较晚,适用范围比较局限,临床需求不高,且经自然腔道手术需要开发设计特殊的器械来满足使用要求。
3 骨科手术机器人
骨科手术机器人用于硬组织手术,目前应用较广泛,主要用于术前规划和术中导航。骨科手术机器人通过患者术前/术中的影像学资料,寻找手术靶点和规划手术路径,利用机械臂的导向作用,指导医生按照规划的手术路径完成手术,提高手术的准确性和安全性。按照应用场景,细分为脊柱手术机器人、关节手术机器人和创伤骨科手术机器人[24]。本节主要报道12款骨科手术机器人(见表2)。

表2 骨科手术机器人代表产品Tab.2 Representative products of orthopedic surgical robots
3.1 脊柱手术机器人
3.1.1 国外脊柱手术机器人
ROSA One手术机器人主要由机器臂基座、摄像机基座、脚踏开关、导航工具及配件组成,可通过选配脊柱外科和脑外科的适配器分别适用于脊柱外科与脑外科手术[25]。MAZOR X手术机器人搭载美敦力先进导航系统可实现全程可视化,提供智能术前规划和术中机械臂精准定位[26]。
3.1.2 国内脊柱手术机器人
天玑®Ⅱ手术机器人是上一代天玑®的升级优化,将多种术中设备进行了整合,更加智能化、便捷化和人性化,形成了智能手术舱[27-28](见图2)。ORTHBOT手术机器人通过自主研发的术前规划、手术导航、可视化压力反馈和主动置钉等模块,可以按照医生预设的手术方案自动精准执行操作,加速我国骨科手术机器人进入自动执行时代[29]。佐航300手术机器人具有良好的系统兼容性,不需要使用三维C臂、碳纤维床等高端设备即可完成手术[30]。

图2 天玑®Ⅱ手术机器人组成[27]Fig.2 Composition of TiRobot®Ⅱsurgical robot
3.2 关节手术机器人
3.2.1 国外关节手术机器人
RIO手术机器人[31](见图3)适用于全髋、全膝和单髁置换手术。该机器人通过基于骨性解剖标志点的配准方法,实现三维配准;通过光电跟踪器,实现对患者的实时位置追踪;通过交互式控制方法和虚拟切割导引技术,实现辅助操作;通过力反馈的方式,辅助医生完成准确的骨骼切削操作[32]。国家骨科与运动康复临床医学研究中心于2020年12月使用RIO手术机器人在博鳌超级医院完成了国内首例智能骨科机器人辅助全新生物型人工膝关节置换手术,精准完成难度极高的生物型假体植入[33]。Cori手术机器人集成了智能机器人平台、操作系统和数据分析系统等多个模块。在植入人工膝盖前,通过可视化切割技术准备、机械校准和韧带数据为每个患者定制治疗计划,实时规划和评估操作误差并辅助操作者平衡植入物。其采用便携式设计,可适应多种操作环境,适合在门诊手术中使用[34]。VELYS™关节机器人是首款可安置在手术床边支持即插即用的关节机器人,无需术前成像,可在全膝关节置换术中准确切除骨骼,使植入物相对软组织对齐和定位[35]。

图3 RIO手术机器人[31]Fig.3 RIO surgical robot
3.2.2 国内关节手术机器人
鸿鹄手术机器人适用于全膝关节置换,主要由手术平台、规划系统、控制平台及手术附件组成。该机器人基于患者术前CT扫描数据及假体模型数据的规划系统,能够协助医生制定个性化假体植入方案;基于手术规划的精准定位,通过配准技术和自主研发的灵巧、轻量化的机械臂,能够快速完成截骨操作,提高手术精准度和工作效率[36]。上海交通大学医学院附属第九人民医院于2021年9月使用鸿鹄手术机器人完成首例国产骨科手术机器人的5G远程膝关节置换手术[37]。ARTHROBOT HIP手术机器人通过术中生理结构与其术前影像数据建立空间关联,保证手术规划的准确执行,配准时间控制在3~5 min,实时显示磨削进度,指示手术规划的磨削区域,警示过度磨削,实时显示安装角度,误差控制在1e 以内[38],主要适用于髋关节置换。TiRobot Recon手术机器人,用于全膝关节置换手术,其采用机器人引导截骨方案,无须开髓、打骨针、更换工具即可完成定位截骨,大大提高了截骨精准度且减少了手术创伤[39]。
3.3 创伤骨科手术机器人
北京罗森博特科技有限公司的骨盆骨折复位手术机器人通过术中实时3D导航、自动手术规划,力位协同机器人精准操作,实现从骨折闭合复位到微创固定全手术流程的智能化手术操作。北京积水潭医院于2021年12月使用该手术机器人进行了全球首个智能骨折复位机器人临床试验[40]。
目前多款骨科手术机器人获我国NMPA批准,其中国产骨科手术机器人获批数量多于国外。脊柱外科手术机器人和关节手术机器人技术相对成熟,临床应用较广;由于骨折手术分型多样,手术需求复杂,现有机器人系统难以满足实际手术需求,创伤骨科手术机器人尚未开展较多的临床应用与产品化推广。骨科手术机器人的核心功能是图像定位、引导和手术路径规划,实现准确识别定位,提高手术的精准化和个体化。骨科机器人与腔镜手术机器人存在同样的缺点,成本高昂、体积大、缺乏触觉反馈等。此外,骨科手术机器人发展相对于腔镜机器人起步较晚,缺少长期的临床对照效果及安全性研究证据。
4 神经外科手术机器人
神经外科手术机器人技术发展最早,1985年KWOH等[41]将机器人辅助手术应用于临床。但受神经外科手术精细解剖结构和手术操作空间的限制,神经外科手术人后期发展较为缓慢。目前神经外科手术机器人主要用于脑外科、活检、定点刺激(帕金森症)、电极测量(癫痫病立体定向电极植入术)、去除囊肿或血肿排空等手术[42]。相较传统的手术方式,神经外科机器人具有较强的辅助影像定位能力,可对病变及周围正常组织进行3D数字化显示,并结合多模态融合技术,帮助医生迅速识别病变组织。机械臂可以在狭窄的术区进行多方位操作,多角度摄像头可实时传递术区图像,减少手术盲区;震颤过滤系统可滤除术者手部颤动,提高操作稳定性[43]。本节主要报道4款神经手术机器人(见表3)。
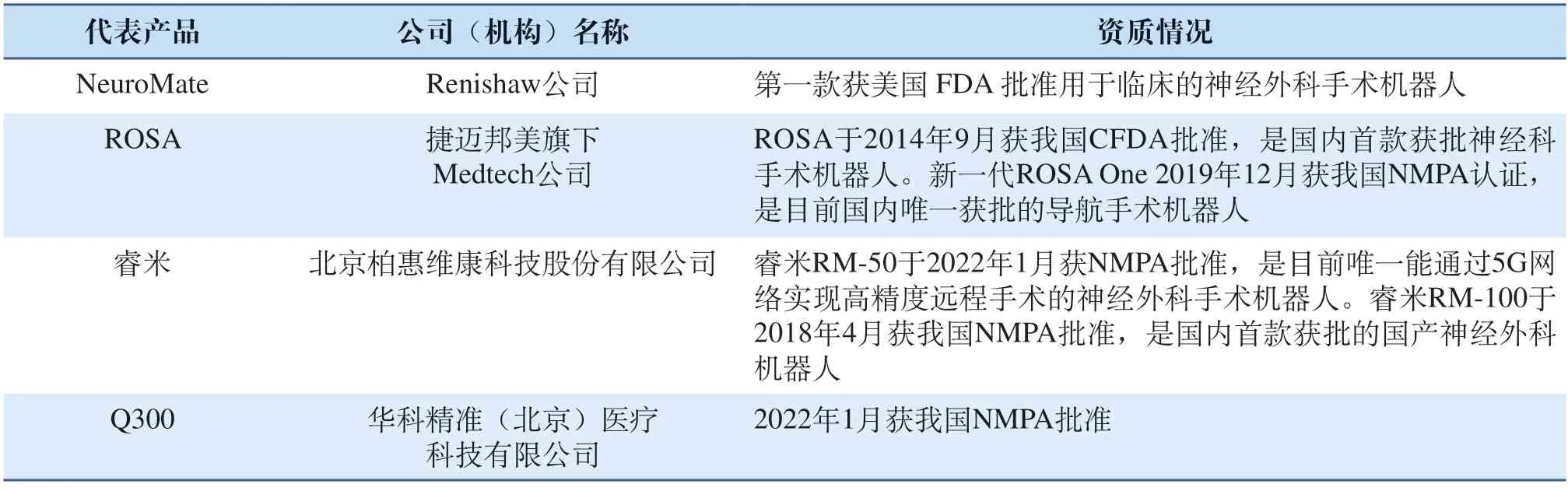
表3 神经外科手术机器人代表产品Tab.3 Representative products of neurosurgical robots
4.1 国外神经外科机器人
NeuroMate手术机器人主要由导航系统、六维力觉感知机械臂和软件工作站组成,具有框架和无框架立体定向注册,机械稳定和精确度高,操作空间舒适[39]。ROSA手术机器人[44](见图4)采用影像学定位和立体定向仪引导,通过对患者颅脑进行扫描,配合彩色多普勒影像仪来构建三维立体的脑部结构图,准确定位靶点位置,误差精确到1 mm以内[45]。

图4 ROSA手术机器人[44]Fig.4 ROSA surgical robot
4.2 国内神经外科机器人
睿米RM-50手术机器人集立体定向与神经导航于一体,关键部件光学跟踪定位仪和机械臂均实现国产化,大大降低了生产和使用成本[46]。Q300手术机器人具备立体定向和手术导航的功能,可满足立体定向穿刺手术和开颅切除手术的双重需求。同时该机器人进行了结构优化,便于移动,除手术室内完成手术外,还可在监护室、CT室甚至普通病房完成快速紧急穿刺定位手术[47]。
目前国产多款神经外科手术机器人获我国NMPA批准,并在功能和结构上进行了升级优化,实现了双重功能和可便捷移动。神经外科机器人具备的核心功能、主要优势和存在的缺点与骨科机器人类似。
5 泛血管手术机器人
泛血管手术机器人通常由成像装置、定位机械臂、推进装置、操作装置4部分组成。泛血管手术机器人研究起步较晚,目前主要有两种类型:一是用于血管介入术的手术机器人,如冠脉支架术、颈动脉支架术、肾动脉支架术和脑动脉支架术,发展相对较快;二是用于心脏电生理治疗手术机器人,如心脏电生理检查、房颤消融,发展相对较慢。泛血管手术机器人手术与传统手术相比,具有操作精度高,实现非接触与远程手术,减少医生和患者的辐射,减少医患之间接触,减少交叉感染的优势[48]。本节主要报道7款泛血管手术机器人(见表4)。
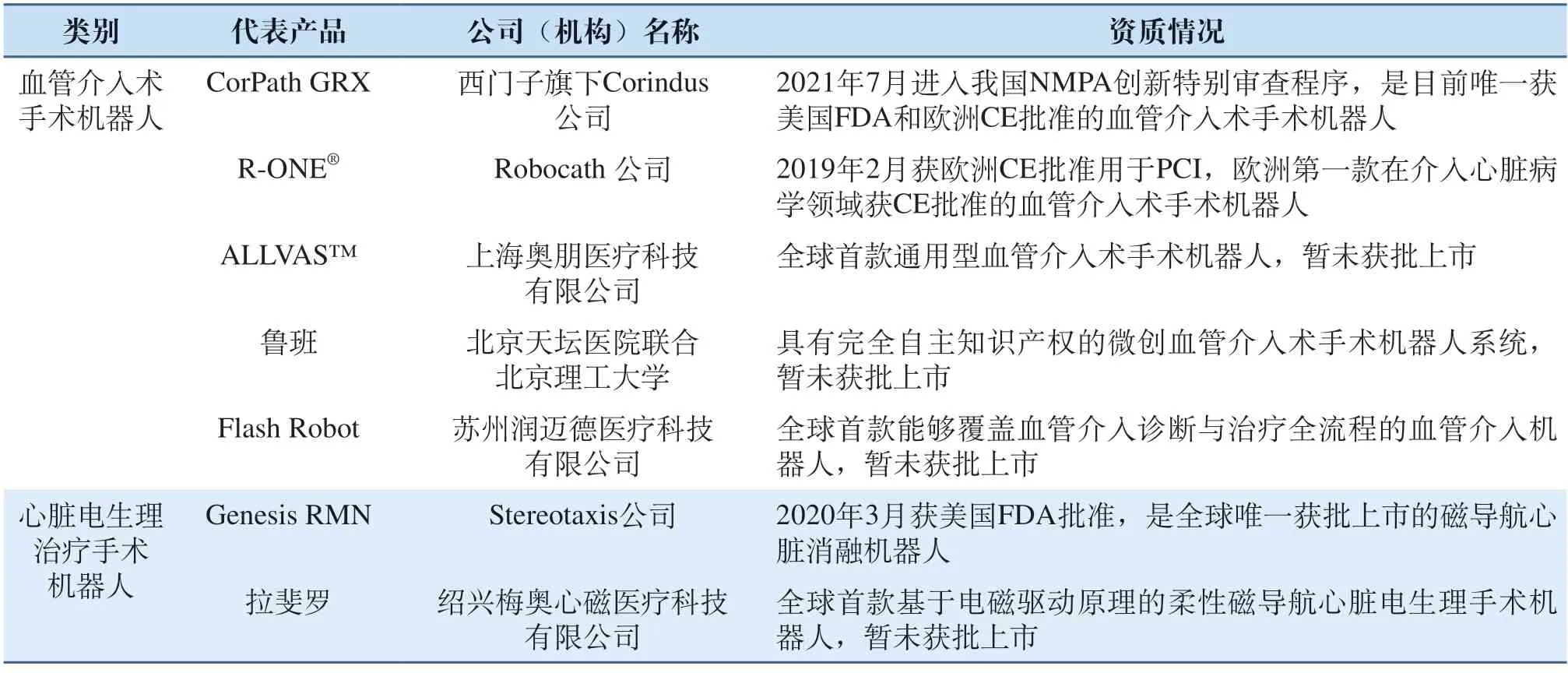
表4 泛血管手术机器人代表产品Tab.4 Representative products of panvascular surgical robots
5.1 血管介入术手术机器人
5.1.1 国外血管介入术手术机器人
CorPath GRX手术机器人适用于冠状动脉、外周血管等介入治疗,由床旁操作和手术控制两个单元构成。床旁操作单元采用模块化设计,包括可灵活移动的机械臂和一次性操控盒,两者通过驱动连接口相连,能够完成精确的推送、牵拉和旋转动作,细微动作可以精确到1 mm。复旦大学附属中山医院于2021年3月使用CorPath GRX手术机器人在海南博鳌超级医院完成了中国首例机器人辅助冠状动脉介入治疗中国首例机器人辅助冠状动脉介入治疗(percutaneous coronary intervention,PCI)手术[49]。R-ONE®[50](见图5)基于主从控制技术的血管介入导航控制系统,通过稳定的机械臂辅助操作,实现导丝进入球囊扩张和精准定位,优化球囊和支架导管输送,使得手术流程更加标准化。中国人民解放军总医院于2021年11月完成R-ONE®在中国的首例注册临床试验,并于2022年5月完成全部注册临床试验[51]。

图5 R-ONE® 手术机器人[50]Fig.5 R-ONE® surgical robot
5.1.2 国内血管介入术手术机器人
ALLVAS™手术机器人能够适配市场上多种类型导丝导管,技术路线应用范围广泛,可完成包括冠脉介入手术在内的大部分介入手术,创造了全球首例神经血管取栓、滤器植入及取出和主动脉支架植入3项动物试验。上海长海医院使用ALLVAS™手术机器人于2021年8月完成了世界首例胸主动脉瘤机器人腔内修复术和腹主动脉瘤机器人腔内修复术[52],并于2021年11月完成世界首例下肢动脉机器人支架成形术[53]。鲁班手术机器人通过直推式非固连传动技术、大扭矩无损导丝递送技术、柔顺双四爪卡式机构,大幅度提升了导丝操控的扭力,实现了无菌隔离非固联传动、同构式多器械协同管丝递送等多项微创介入手术机器人的关键技术突破。北京天坛医院于2019年11月使用 鲁班 手术机器人完成国内首例机器人辅助全脑血管造影手术[54]。Flash Robot机器人实现了自动化的手术穿刺(视觉定位穿刺)、造影(造影引导推送)、诊断(快速功能学诊断)、通路建设(介入通道构建)、手术导航指导和术后评估管理全流程操作[55]。
5.2 心脏电生理治疗手术机器人
5.2.1 国外心脏电生理治疗手术机器人
Genesis RMN手术机器人由两个控制磁场的机器人组成,手术过程中在DSA的影像引导下,医生使用直观的计算机界面来调整磁场,进行导管的引导和定位,提高了柔性磁导管插入的安全性和准确性[56]。
5.2.2 国内心脏电生理治疗手术机器人
拉斐罗手术机器人通过心脏自动导航技术,以心脏为中心施加可变磁场,将柔性磁导管放入心脏腔室后进行精确的立体定位,能够精准标测和消融心律失常病灶,并可大幅降低单台手术的耗材成本[57]。
目前尚未有泛血管手术机器人获得我国NMPA批准。多款国产血管介入手术机器人正处于研发阶段,正朝着平台开放性和通用性方向发展。泛血管手术机器人核心功能是通过功能图像定位、引导,实现准确识别定位,通过操作装置和推进装置控制导管导丝多种微创器械准确完成医生的动作操作,实现精细化手术。泛血管的手术机器人除同样存在成本高昂、体积大、缺乏触觉反馈等缺点外,还需克服兼容输送多种类型导管导丝及人工手术操作与机器人手术操作器械适用性的差别。泛血管手术机器人的操作对象是血管,血管壁易破裂,仅依靠图像成像难以判断施加在血管壁上力的大小,容易造成血管壁破裂,需要解决力的准确测量和传导两个难题。
6 专科手术机器人
口腔、耳鼻喉和眼科专科的手术操作具有一定特殊性,且受需求市场的限制,目前专科手术机器人技术相对不成熟,应用范围不广,发展比较缓慢。本节主要报道7款专科手术机器人(见表5)。

表5 专科手术机器人代表产品Tab.5 Representative products of specialized surgical robots
6.1 种植牙手术机器人
6.1.1 国外种植牙手术机器人
Yomi手术机器人通过软件进行术前规划,利用物理和触觉引导,在术中提供手术器械的导航,不需要使用手术导板,可实现准确规划和放置牙种植体,能够有效防止钻过预先计划的深度,以避开危险的解剖结构,大幅提高种植手术的精确度、灵活性和安全性[58]。
6.1.2 国内种植牙手术机器人
瑞医博种植牙手术机器人由机械臂、手术导航软件、光学跟踪定位仪、专用仪器车、定位导板、手机定位板、钻头标定板和探针组成[59](见图6),精度误差控制在1e 和0.5 mm以内,能够精准完成口腔种植手术[60]。北京协和医院于2021年11月使用瑞医博手术机器人完成全球首例光学导航机器人辅助全口无牙颌种植及数字化即刻修复手术[61]。DRS0605-FT250种植牙手术机器人核心技术包括空间映射、手术路径规划和手术路径定位,具有种牙手术视觉导航的配准方法及电子设备、种植手机夹持装置、口腔种植手术定位装置,能够按照设定程序在患者口腔内进行自主操作[62]。

图6 瑞医博种植牙手术机器人组成[59]Fig.6 Composition of Remebot dental implant surgical robot
6.2 人工耳蜗植入手术机器人
RobOtol手术机器人(见图7)具有主从协作式的多自由度耳科领域的多功能平台,能够将电极以最佳的角度缓慢无震颤植入,避免损伤面部神经。上海市第九人民医院使用RobOtol手术机器人于2019年11月完成国内首例手术机器人辅助人工耳蜗植入手术[63]。HEARO手术机器人主要包括规划软件、导航系统、患者头部固定装置、规划软件和手术操作系统,在医学影像引导下,具有较高的自动化程度[64]。iotaSOFT人工耳蜗植入机器人主要用于协助医生在人工耳蜗植入手术中控制电极阵列插入速度,可有效提高手术操作的稳定性和定位精度[65]。

图7 RobOtol手术机器人[63]Fig.7 RobOtol surgical robot
6.3 眼科手术机器人
ORYOM手术机器人主要用于治疗各种眼科疾病,包括白内障、青光眼、视网膜下分娩和视网膜疾病。该机器人具有 14个微型自由度,能够执行精细任务,精确度是人手的10倍,可提供亚毫米级的精确度,混合运动结构允许到达人眼内的任何点[66]。
目前有种植牙机器人获我国NMPA批准集中在种植牙手术机器人,尚未有人工耳蜗手术机器人和眼科手术机器人获我国NMPA批准。种植牙手术机器人的核心功能在于图像定位、引导和手术路径规划。人工耳蜗手术机器人核心功能精准稳定控制植入电极,对微型机械控制精度要求极高;眼科手术机器人核心功能在于高精度的显微操作。
7 结语
本综述共报道39款手术机器人代表产品,目前17款获得我国NMPA批准。腔镜手术机器人、骨科手术机器人和神经外科手术机器人发展较早和较快,技术相对成熟,国内外均有产品获我国NMPA批准。血管介入手术机器人和心脏电生理治疗手术机器人起步较晚,但发展很快,很多产品正处于研发或申报批准流程,目前国内外暂未有产品获我国NMPA批准。专科手术机器人由于技术操作的特殊性和受需求市场的限制,目前技术相对不成熟,应用范围不广,发展比较缓慢。手术机器人国外生产企业主要集中在欧美等发达国家。我国手术机器人起步较晚,但近年来随着新技术的进步、国家政策的支持和临床需求的增加,国产手术机器人正快速发展。
现阶段手术机器人手术普遍存在成本高昂、缺乏触觉反馈(力反馈)、便捷性差的缺点。未来手术机器人须进一步朝着智能化、微型化、开放化、远程化和低成本化发展[67]。智能化,主要研究各种高精度反馈和预警系统,提高手术机器人视觉 和 触觉 的灵敏性,并结合人工智能技术开发手术机器人的思考能力,由半自主式向全自主式发展。微型化,主要是优化结构设计,减少对空间的占用,增强使用的便捷性。远程化,是将远程人机通信与人机协作技术相结合,并融入远程操控的虚拟现实技术和临场感技术,提高远程化操作的实时性和精确性。开放化,是系统要兼容多种器械,减少配套专用器械的依赖,加强对能使用现有器械为基础的手术机器人研究,减少为兼容手术机器人而开发新型器械,缩短研发周期和医生学习周期。低成本化,是要降低生产成本和使用成本,加快临床普及推广。
腔镜手术机器人、经自然腔道手术机器人、人工耳蜗手术机器人和眼科手术机器人将来可通过在操作器械末端应用位置跟踪技术,并结合导航定位系统,实时测量显示器械与手术靶点的精准距离[12]。骨科机器人、神经外科手术机器人和种植牙手术机器人将来通过混合现实技术,将患者虚拟数字模型与患者病变部位完全重叠在一起,转化为高维度 透视 手术区域[68],通过人工智能大数据分析逐步让手术机器人学会思考,学会自主精准导航和规划手术路径。泛血管手术机器人主要优势集中在同步协调功能方面,将来需要解决触觉反馈(力反馈)面临力的准确测量和传导两个难题,进一步提高触觉力反馈的敏感性,并拓宽输送多种类型导管导丝的兼容性[69]。
