手术机器人空间定位精度检测技术发展概述
2023-02-12洪伟金路凯
【作 者】 洪伟,金路凯
1 上海市医疗器械检验研究院,上海市,201318
2 国家药品监督管理局医用电气设备重点实验室,上海市,201318
0 引言
手术机器人是对采用机器人技术进行手术治疗设备的一个泛称。目前采用机器人技术的辅助手术设备和辅助手术系统(简称RA设备)是全球在医学领域运用机器人技术的一个研究热点,也是手术设备研制的一个发展趋势。作为一个新兴的交叉学科产物,RA设备在形态、适用术种上还会不断推陈出新,医疗器械检测机构也势必要面对检测不同新形态的RA设备精度指标的技术挑战。对机器人的发展而言,机器人精度的评价离不开空间六维位姿测量、轨迹跟踪等空间坐标检测技术。本研究的设备选择和试验方法将为RA设备性能评价方法标准化提供参考依据。
1 RA设备的分类
国务院于2015年发布的《中国制造2025》将机器人技术列为 全面推进实施制造强国的重点发展领域。机器人不仅用于工业领域,在医疗领域的应用也越来越广泛。目前,机器人在医疗领域的应用主要集中于外科手术机器人、康复机器人、护理机器人和服务机器人方面。手术机器人是目前应用最广且最具前景的医疗机器人细分领域,产品涵盖腹腔镜手术、骨科导航及手术、血管介入、经自然腔道导航、经皮穿刺机器人等。YY/T 1712ü 2021标准定义的RA设备分两大类:主从控制的RA设备和导航引导下的RA设备。
1.1 主从控制的RA设备
主从控制的RA设备的典型产品为美国直觉外科公司的达芬奇手术机器人[1-3],其广泛应用于泌尿外科、肝胆胰外科、胸外科、妇科等相关的微创腹腔镜手术。这类设备主要有以下3个特征:①采用腹腔镜作为视觉闭环的传感器,手术过程中医生通过腹腔镜获得视觉图像信息使末端执行器的空间位置信息得以实时反馈至医生端,由此医生可直观地遥控手术器械工作;②执行机构分为主臂和从臂两部分,主臂主要负责采集医生手部的动作轨迹,而从臂主要负责连接并控制手术器械执行手术操作,通过主从空间映射,在从臂末端执行器以一定比例还原医生手部的动作完成手术;③通常一套主从控制的RA设备系统内含多个从臂执行器,单个从臂执行器可分为定位机构和末端手术器械。
机器人手术技术已经成功实现了复杂手术的微创化、提高了手术操作的精度与质量、增强了手术安全性,并且能够融入各种数字化手术诊断信息、计算机辅助判断与监控、实时操作评估与约束,将外科手术带入全新的数字化手术阶段。这使得手术机器人形成了一项快速成长且极具潜力的新兴高技术医疗器械产业。
目前,越来越多的国内外公司也大力投入主从式腔镜机器人的研发与生产制造,如英国的CMR Surgical公司与中国的上海微创医疗机器人(集团)股份有限公司,分别拥有分体式腔镜机器人产品Versius与一体式腔镜机器人产品图迈。
1.2 导航引导下的RA设备
导航引导下的RA设备主要有以下3个特征:①手术执行机构多采用串联结构的多关节机器人。国内多数导航引导的RA设备采用6自由度或7自由度的协作机器人作为手术执行机构,如图1所示。该类RA设备主要应用于神经外科手术、骨科手术、牙科手术等,比如北京柏惠维康科技股份有限公司的立体定向神经外科手术机器人Remebot及北京天智航医疗科技股份有限公司的骨科机器人均采用了丹麦UR的协作机械臂作为执行机构[4-6];②采用三维医学图像数据,利用图像识别技术进行病灶定位、自主路径规划实现机器人自动完成手术定位功能[7-9];③NDI引导下实现设备的高精度运行轨迹控制,往往该类RA设备还会使用NDI的三维跟踪定位系统进行执行机构空间位置的闭环控制。此外,经自然腔道导航机器人,如美国强生子公司Auris旗下的柔性机器人Monarch通过导航技术与主从控制技术,可以实现术前支气管树三维模型重建及路径规划;而经皮穿刺机器人,如微创介航机器人的Mona Lisa前列腺穿刺机器人定位系统则通过超声设备引导穿刺病灶。

图1 导航引导下的RA设备Fig.1 RA equipment under navigation guidance
2 RA设备的精度性能指标
标准YY/T 1712ü 2021分别定义了 主从控制的RA设备精度 和 导航引导下的RA设备定位精度 两大类RA设备涉及空间位姿精度的指标。
2.1 主从控制的RA设备精度
主从控制的RA设备精度 中要求测量位姿准确度和位姿重复性、主从操作准确度和重复性两大类精度指标。其中位姿准确度和重复性是对主动控制的RA设备从臂的末端执行器的位置和姿态的定位精度进行测量。位姿重复性的测量相对简单,比较容易实现,而位姿准确度的测量实际须解决3个技术问题:①测量仪器坐标系和主从控制的RA设备控制坐标系的相对空间关系构建,其难点主要在于RA设备控制器能否准确给出与测量仪器靶标点相关联的指令坐标数据[10];②主从RA设备能否给出测量点P1~P5的(x,y,z,a,b,c)六维指令数据,这一步的难点是末端执行器种类较多,形体差异比较大,对姿态数据的描述各不相同且不一定完整;③体积较小的末端器械无法安装姿态测量用的靶标。
主从操作准确度和重复性中定义了主从操作距离准确度和主从操作距离重复性、主从操作姿态准确度和主从操作姿态重复性。主从操作的姿态类精度测量是这大类指标的难点,原因同上述②、③点技术问题。
2.2 导航引导下的RA设备定位精度
导航引导下的RA设备定位精度 中主要定义该类设备的位置准确度、位置重复性及设备系统精度3个空间精度指标。目前导航引导下的RA设备使用串联关节结构的协作机械臂较多,因而位置准确度与位置重复性两项指标在YY/T 1712ü 2021标准中的定义与方法均参考了工业机器人标准。而设备系统精度这个指标是导航引导下的RA设备特有的一个性能指标,实际上模拟了手术机器人通过医学图像识别系统对病灶识别定位后自动规划手术轨迹并进行手术的应用场景,检测的是叠加了跟踪装置定位精度、机械臂的本体控制精度在内的系统综合精度[11]。该项指标的测量须定制一个模拟手术对象的标准器并事先获得该标准器的医学图像或建模。该项指标测试设计针对不同结构的产品具备较高的灵活性,难点在于为不同的产品定制新的测试方法。
3 主流三坐标测量设备在RA设备精度检测中的应用
3.1 激光跟踪仪
随着激光跟踪系统的不断发展,其应用逐渐延伸到各种精密测量领域,例如在航空航天领域对飞行器零部件精度及装配精度的测量;在轨道交通制造行业中对高精度机床平面度、直线度等的测量;此外,在军工、船舶装配、汽车装配、核电等领域,激光跟踪仪也被广泛应用。
激光跟踪仪是基于角度传感和激光测长技术相结合的球坐标测量系统,主体测试设备由测距激光和2自由度的角度跟踪伺服系统构成。工作时需要在被测物上放置激光反射靶球,在数据处理控制器的控制下角度跟踪伺服系统将做出响应,使激光束始终沿着靶球内三面相互垂直的反射镜中心入射。因此,在采集终端能收到镜面反射的激光的条件下,系统都能对静止或移动的目标进行跟踪和采集,反射靶球的球心在仪器坐标系下的三维坐标即可通过球坐标下系统内角度编码器获取的水平与垂直向的角度信息及激光测距信息进行换算,目前市场主流激光跟踪仪在5 m测量范围内精度均能够优于0.04 mm。激光跟踪仪在工业机器人性能测量中已经广泛应用,以浙江谱麦科技有限公司为代表的国内厂商已经配备有完善的基于激光跟踪仪作为测量仪器的工业机器人性能测量系统。
激光跟踪仪测量RA设备的位置准确度、位置重复性具有高效、省时、准确、自动化等特点。通过专用夹具可以将反射靶球安装到机器人末端被测点,再通过专用测量软件进行坐标系对齐就可以完成测量。如图2所示激光跟踪仪测量RA设备。

图2 激光跟踪仪测量RA设备Fig.2 Laser tracker measuring RA equipment
3.2 关节式坐标测量机及蓝光扫描
关节式坐标测量机一般由3根刚体臂、6个活动关节和1个测头连接组成,有些机型测头上可以额外安装蓝光扫描头,使设备具备非接触三维扫描功能。关节式坐标测量机(见图3)相对于台式三坐标测量机而言有携带便捷、适合工业现场使用、测量死角少等优点。

图3 关节式坐标测量机Fig.3 Articulated coordinate measuring equipment
关节式坐标测量机能较为方便地测量导航引导下的RA设备的系统精度和主从控制的RA设备的重复精度。关节式坐标测量机的扫描功能属于非接触测量,测量时不用安放反射靶标。测量导航引导下的RA设备的系统精度时只需要机器人末端的手术器械走到指令位置后对器械末端及模拟手术对象的标准器测试点整体扫描,形成空间三维点云模型,在模型里进行误差的提取分析,测量场景如图4所示。同理,对于主从控制的RA设备从臂末端的手术器械位姿重复性指标也可以使用类似方法进行测量,将多次扫描模型数模对齐后进行离散分布误差分析。

图4 关节式坐标测量机扫描测量场景Fig.4 Scanning and measuring scene of using articulated coordinate measuring equipment
3.3 视觉动态跟踪测量系统
基于视觉的动态跟踪捕捉技术是一个趋于成熟并炙手可热的测量运动物体在三维空间运动状况的视觉测量技术。视觉动态跟踪测量系统大空间多目标的检测优势是传统三坐标测量仪器所不具备的,因此已经被用于康复机器人、人体外骨骼、主从控制的RA设备等医疗设备的性能检测。目前市场上主要有两种视觉动态跟踪测量系统:红外运动捕捉系统和高精度视觉动态跟踪测量系统。
(1)红外运动捕捉系统。
它是相机发射特定波长的红外光照射测试场,通过对目标上特定的红外反射光点的监视和跟踪来完成运动捕捉的任务。通常情况下,红外运动捕捉系统由红外捕捉相机、信号传输设备、数据处理工作站以及反光标记点组成,通过在运动物体关键部位(如机器人末端)粘贴反光标记点,由多个动作捕捉相机从不同角度实时探测光学标记点,数据实时传输至数据处理工作站,根据三角测量原理精确计算光学标记点的空间坐标,从而得到运动物体的实时三维坐标数据。理论上,红外运动捕捉测量系统可以同时对多个光学标记点进行测量,每个光学标记点至少被2台捕捉相机同时捕捉到影像。红外运动捕捉测量系统需要尽可能多的相机覆盖一定面积的测试区域,一般10 m2的区域最好由8~12台捕捉相机覆盖,测量精度一般能达到亚毫米级,帧速最高可达300 fps以上。
(2)高精度视觉动态跟踪测量系统。
美国GSI公司是工业摄影测量技术的领导者,从事摄影测量研究超过30年,其V-STARS摄影测量系统已发展到第七代,属于高精度、光学的、三维坐标测量系统,特别适合快速、准确、动态地对快速移动或变形物体进行三维测量。该系统的高光度 DynaMo(dynamic motion)工业相机功能强大、坚固、速度快。相机系统包括一个高速的频闪闪光系统,即使在强烈阳光的情况下,该系统会瞬间捕捉每一个场景。该系统的靶标工装有着重量轻、易于固定的优势,且只需一个靶标即可获得主从控制RA设备姿态相关的测量数据,因此该设备相较于激光跟踪仪会更适用于主从控制的RA设备相关精度指标,图5为V-STARS系统检测一台主从式腹腔镜手术机器人的场景。而相比于上述红外运动捕捉系统,V-STARS系统的精度更高,摄像系统性能参数如表1所示。但使用该系统需在整面墙上布置靶点供相机识别以便建立世界坐标系,这一特性使得产品的试验前布置成本要高于上述其他设备,也牺牲了便携性。并且目前该系统的摄影频率仅为10 Hz,无法完成主从控制RA设备动态的数据采集与分析。
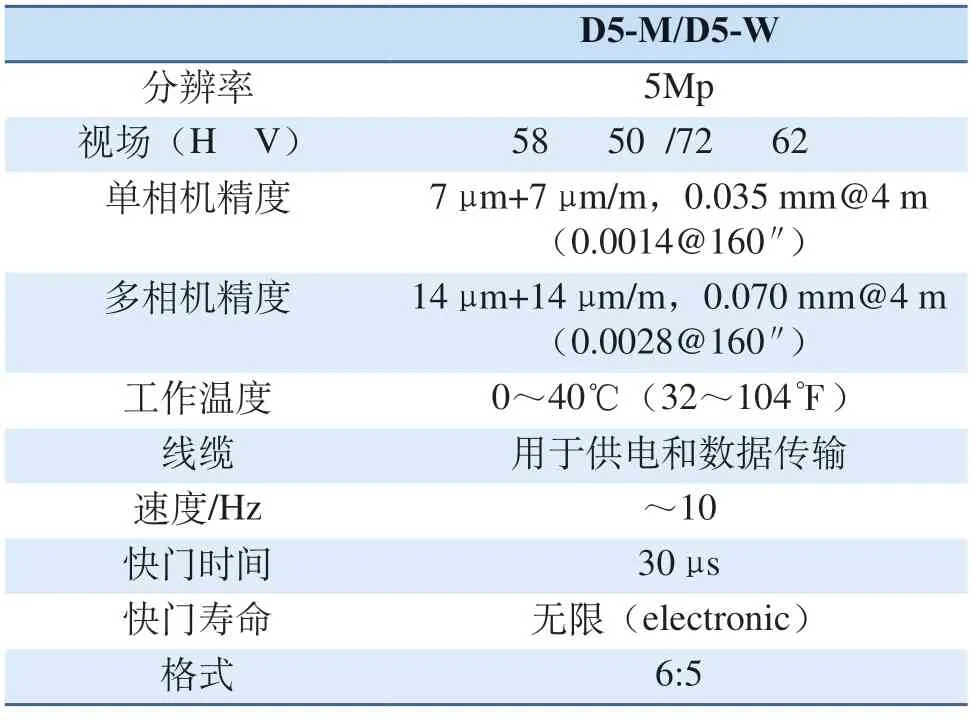
表1 V-STARS系统性能参数Tab.1 Parameter of V-STARS technical specifications
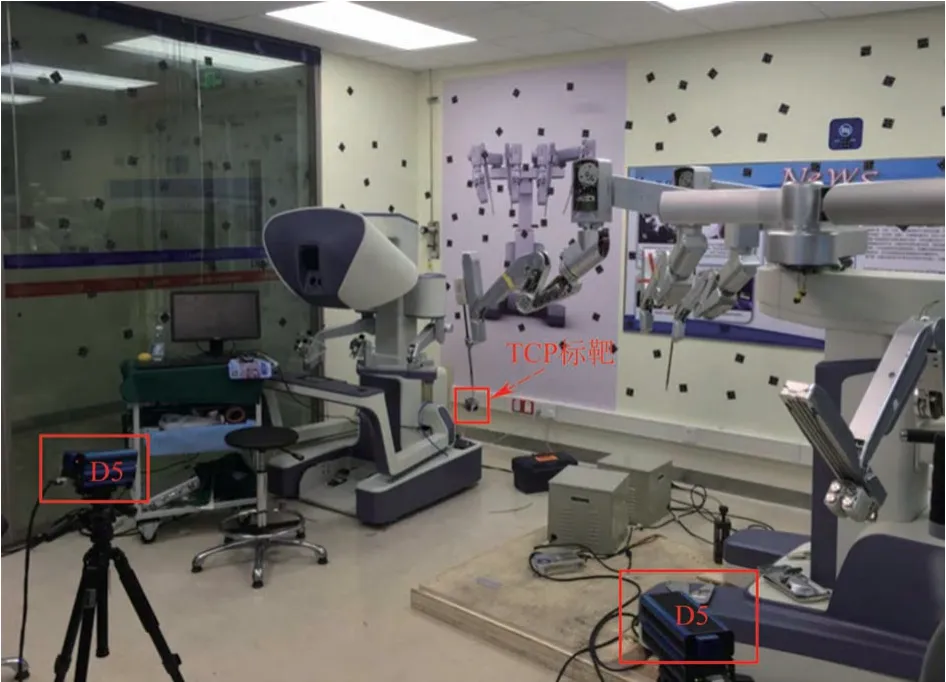
图5 V-STARS系统测量主从控制的RA设备Fig.5 V-STARS system measuring master-slave controlled RA equipment
上述2种视觉动态跟踪测量系统都具备了大空间多目标六维位姿的跟踪测量能力,对于精度要求高且预算充足的测量应用可以采用V-STARS摄影测量系统;对于精度要求不高、预算不充足的测量应用可以选择红外运动捕捉系统。
3.4 主流三坐标测量设备在RA设备精度检测中的应用比较
当上述设备应用于RA设备相关精度指标的检测工作时,各自展现出不同的特性,以及基于设备工作原理和基本性能的优势与劣势。因此,如何选择正确的设备完成相应的试验便成了高效完成检测工作并获得准确试验数据的关键。
如检测配备常见协作机械臂的导航引导下的RA设备定位精度时,激光追踪仪往往会成为首选设备。因为其有极高的测量精度且实时跟踪的特性,使得用它完成此类试验高效且精确。并且通过配备先进的三维数据处理软件和基于现有工业机器人测量作业的关节臂分析软件,能够方便地完成位姿准确度、重复性等试验的分析计算工作。但在检测此类设备的姿态数据时,需在设备末端同时布置3个靶球,且根据设备的工作原理,跟踪点在不同靶球之间的切换只能通过特定软件预设完成而非自动完成。同时,靶球因设备末端的翻转或部件遮挡导致丢光、靶球外壳与测试点发生碰撞等问题都会影响测试结果。
对于同属于导航引导下的RA设备的穿刺机器人,被测末端不再是普通导航机器人机械臂末端的法兰盘,而变成了活检或消融针针尖,因此难以找到位置固定追踪仪靶球,且针尖端承载轻微重量即会发生形变,因而影响性能检验准确性。而关节式坐标测量机及蓝光扫描设备的非接触式检测方法能够弥补激光追踪仪的不足,为各类因末端受力导致形变的设备的检测提供新的选择。相较于激光追踪仪,关节式坐标测量设备显著的劣势在于只能应用于静态的测量,且每一点测试用时都将大大增加。
主从控制的RA设备精度指标的检测则对测量设备提出了更高的要求:设备不仅需同时捕捉主端和从端的多个测量点以获取姿态信息,且标记点应足够轻以防负载能力只有几十克的从臂末端手术器械发生弹性形变,还应在设备末端翻转时尽量避免丢失追踪的情况发生。因此,视觉动态跟踪测量系统几乎成为唯一满足各项要求的设备选择。然而红外光学运动捕捉系统的精度往往仅能达到0.1 mm,目前由于主从控制的RA设备精度性能限制虽能满足检测需求,但随着腔镜类机器人的发展,将面临精度不足以符合检测不确定度要求的问题。
4 总结与展望
由于目前国内医疗手术机器人技术的高速发展,医疗机器人已成为一个多学科交叉的研究领域,涉及电子通信技术、机器人结构设计、机器人控制技术、计算机图像处理、光学影像技术、虚拟现实技术、医学和微创手术等方法,种类众多,参数各异,并且随着技术的不断发展,5G、人工智能等新技术将不断融入手术机器人中[12-15]。然而,与之相对的是检测能力极大的滞后性。由于没有统一的软硬件检测装备,针对手术机器人安全和性能的测试数据的横向对比评价无法进行。这不仅客观上制约了我国手术机器人行业的快速健康发展,更对我国人民的用械安全构成了潜在隐患。本研究介绍了各式检测设备各自的优势与劣势,可以看出,目前并没有一款设备或检测系统可以完全覆盖RA设备所有精度指标的测量,因此根据设备特性在相应的测试中选择合适的检测设备成为高效完成检测工作并获得准确试验数据的关键。在未来的研究与工作中,根据各类设备可二次开发的特点,应研发检测精度更高、检测过程自动化、高度通用性的RA设备精度检测系统,使其能够对手术机器人的安全性和有效性技术指标进行全面的测试,保障手术机器人测试的准确性及可靠性。该举措将有助于提升我国手术机器人的性能评价水平,促进产业向更规范、高质量的方向发展。
