一种多功能智能小车设计
2023-02-11曲晓坤邱浩峰何武剑尹沼臣孙俊巧
曲晓坤 邱浩峰 何武剑 尹沼臣 孙俊巧 赵 怡
(1.天津职业技术师范大学,天津 300222;2.天津市高端智能数控机床工程研究中心,天津 300222)
0 引言
在当今形式下,智能小车正朝着无人化、工业化方向发展,其常用于固定路线的物品运输,如无人快递车、仓库运输车等。现如今,智能小车主要用于在一个环境里的自动运作,通过预先设定的模式,不用人为管理,可实现科学勘探等。
本研究通过设计一种具有更加稳定的多功能智能小车,来解决其在实际应用过程中出现的问题,如在使用的过程中存在使用范围受地形限制、视频传输画面抖动、换向方式复杂等问题。
1 智能小车硬件系统的设计
本研究设计了一种多功能智能小车,智能小车的整体结构尺寸为L×B×H=536 mm×460 mm×320 mm。在现有技术的基础上,为解决现有视频智能小车运动场景受限制、视频画面抖动、换向方式复杂等问题[1],设计出一种能适应复杂环境的智能小车,如图1所示。
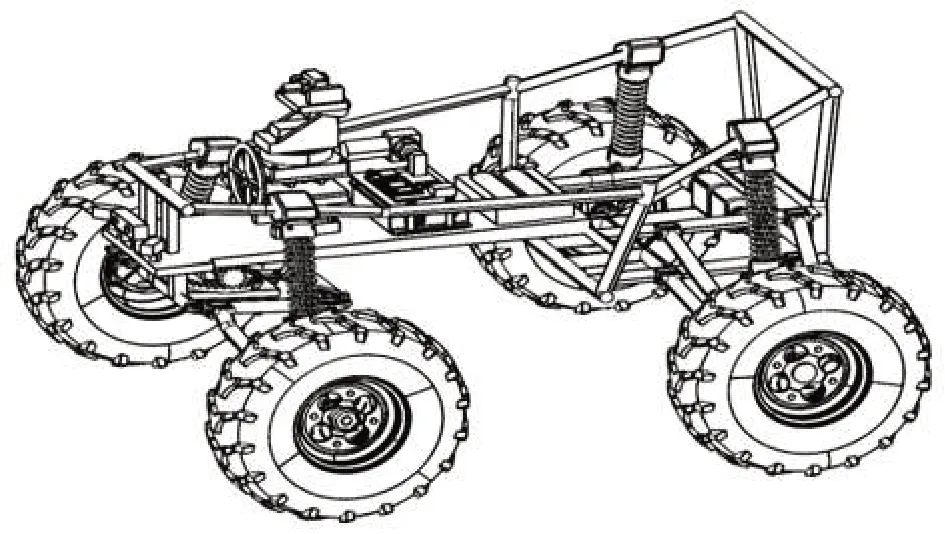
图1 智能小车结构图
1.1 智能小车运动系统设计
在车身与轮胎的连接处有独立的悬挂装置,该独立悬挂装置与车身铰接,使车身底盘升高,并使车轮可小幅度地上下摆动,从而提高小车的越障性能和减震效果。在遇到高低不平的地面时,独立悬挂装置一方面通过可转动的连接与地面自动匹配相对转角,另一方面悬挂装置的减震器可通过物理平衡的方式对车身进行回正,从而实现复杂地形的稳定移动,提高智能小车的机动性。动力系统由驱动机和万向轴组成。万向轴一端与主控芯片连接,另一端与车轮连接输出动力,由此产生运动[2]。独立悬挂装置如图2所示。
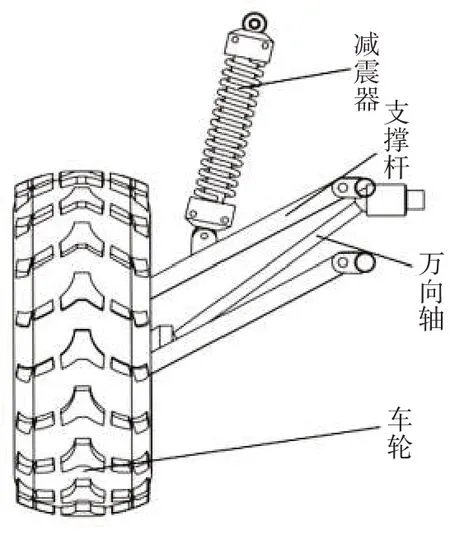
图2 智能小车独立悬挂装置
1.2 智能小车平衡装置设计
平衡装置结构如图3所示,包括陀螺仪传感器、加速度传感器、第四驱动电机、水平台和转轮。陀螺仪传感器和加速度传感器安装在水平台的背面[2],并与主控芯片连接。第四驱动电机安装在水平台背面正中部位,其与转盘、主控芯片连接。
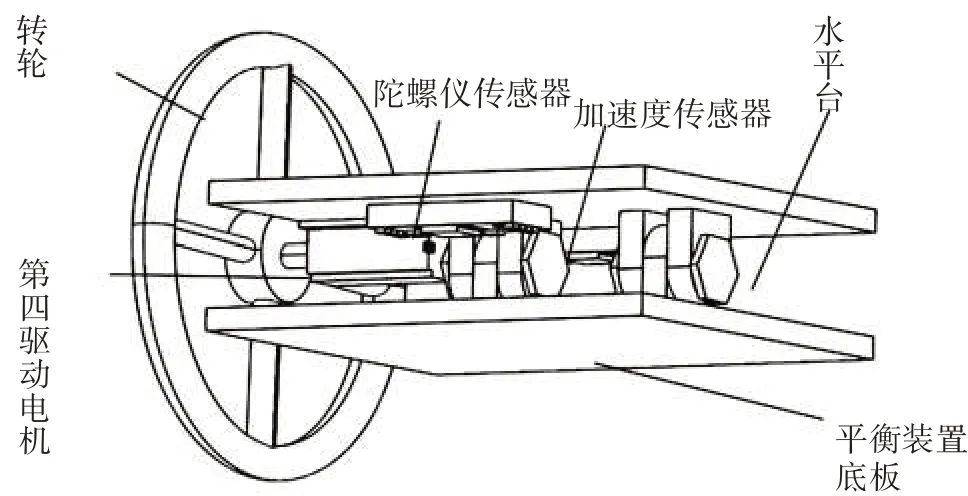
图3 智能小车的平衡装置
现有的智能小车在翻越较高的障碍物时,会出现运动不稳的情况。因此,本研究通过陀螺仪和加速度传感器来自动检测运行过程中水平台的偏转角度和偏转速度,并将检测信号传输至主控芯片,主控芯片通过内置算法来控制稳定装置内的驱动电机对角度进行修正,从而提高视频传输画面的稳定性。
1.3 智能小车通信系统设计
通信系统的硬件包括二维舵机云台、高清摄像头,二者均与主控芯片相连。高清摄像头传输视频影像到远程控制终端,远程控制终端设有配套的APP,可用来接收高清摄像头传输的视频影像,还可将遥控信号传输至二维舵机云台,并控制其运动,云台舵机安装在水平台上。
1.4 智能小车换向结构设计
本研究在小车换向方式上也有改进,如图4所示。换向机构包括机架、连架杆、连杆、第三驱动电机、面齿轮和直齿轮。机架两端分别与两个连架杆铰接,连杆分别与两连架杆的另一端铰接,机架与连杆等长,第三驱动电机与直齿轮连接,直齿轮安装时与面齿轮轴线呈90°夹角,面齿轮侧面有延长杆,延长杆与两小连杆铰接,小连杆与连架杆铰接,面齿轮安装在机架中线处,小连杆对称安装。小车采用平行四边形的换向机构,这是因为平行四边形的特性使得换向速度更快,过程更加平稳。与传统的改变马达转速换向相比,新的方式更加便捷和高效。
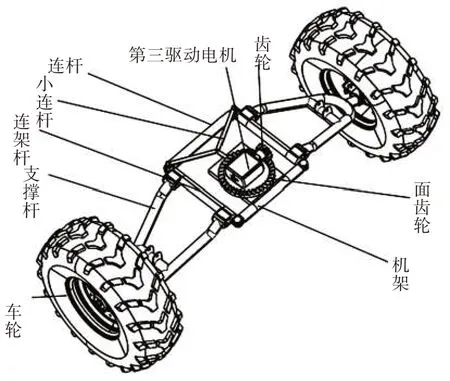
图4 智能小车的换向结构
1.5 智能小车传感器设计
传感器的设计包括避障模块、循迹模块和超声波模块。
1.5.1 避障模块。避障模块采用红外避障传感器ZY101,如图5所示。该传感器模块对环境光线的适应能力强,并具有一对红外线发射与接收管,发射管发射出一定频率的红外线,在检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理后,绿色指示灯会亮起,同时信号输出接口输出数字信号到主控芯片,主控芯片内的置逻辑代码通过调用代码来实现小车的转向避障功能[3]。
1.5.2 循迹模块。循迹模块(见图6)安装在车头下端,通过红外线探头来判断前方是否存在物体。当探测到物体时,会产生对应的感应信号,并将其传递给主控芯片,主控芯片调用内置代码来控制小车跟随前方物体,并通过远程控制终端来实现控制循迹功能的开启或关闭。循迹模块能感应地面是否有预设的轨迹,并产生对应的感应信号,通过预设的轨迹使小车按规定路线行驶,从而实现更加智能化的操作。当中间的红外传感器ht6221检测到黑线后,小车在轨道中间,直流电机正转,两个轮子保持前进。当左边的红外传感器检测到黑线时,这说明小车要进行左拐弯,左边的第一驱动电机停止转动,右边的第二驱动电机保持转动,从而实现左转弯。当右边的红外传感器检测到黑线时,这说明小车要进行右拐弯,右边的第二驱动电机停止转动,左边的第一驱动电机保持转动,从而实现右转弯。

图6 循迹传感器
1.5.3 超声波模块。超声波模块通过发射和接收超声波信号,并将接收到的超声波信号发送至主控芯片,以此来提高避障功能和循迹功能的精准度[4]。当超声波模块产生超声波后,单片机的计时器开始计时。超声波在遇到障碍物后会被反射,超声波模块在接收到反射波后,单片机的计时器停止计时。根据收发超声波的时间差,便可计算出超声波模块与障碍物的距离。超声波模块在接收超声波时存在能量转化,当接收到反射波后,声信号会转换为电信号,从而使单片机停止计时。
1.6 智能小车远程控制装置设计
远程控制装置包括Wi-Fi模块、蓝牙模块和物联网远程遥控模块[2],分别连接主控芯片和所适配的传感器,主控芯片包括Arduino控制板和功能转接板,传感器包括循迹模块、避障模块和超声波模块。Arduino控制板与功能转接板连接,用于接收和处理各种传感器所传达的信号,并编译程序进行控制。功能转接板通过和各类传感器进行连接,传输各类传感器信号到Arduino控制板,并扩展其功能。而对于传感器,则要将感应到的信息发送至主控芯片中,主控芯片根据不同的感应信号来传输不同的信息。
1.7 智能小车移动组件设计
移动组件包括第一驱动电机、第二驱动电机、万向轴接头、万向轴、主动轮和从动轮。第一驱动电机的输出轴与万向轴接头连接,万向轴的一端与万向轴接头连接,另一端与主动轮连接,第一驱动电机还连接至主控芯片,主控芯片被配置为基于远程遥控终端控制启动、关闭或反转第一驱动电机。移动组件安装在车身底部后端,并在其悬挂装置上安装主动轮和从动轮的支架,主控芯片根据移动指令来控制第一驱动电机和第二驱动电机的工作,第一驱动电机和第二驱动电机驱动主动轮转动,主动轮带动从动轮转动,从而实现小车移动。
2 智能小车软件系统设计
软件设计是指智能小车控制系统内的编写和算法,要实现科学的程序设计,确保控制系统能实现及时维护、可调试的功能。首先,系统主控芯片的软件设计是在Arduino UNO主控板内预设一段程序,与远程遥控器手机进行匹配,匹配连接完成后,手机可通过互联网远距离对Arduino UNO主控板发出操作指令。而避障系统软件的设计,则是通过发射管来接收外界信号,主控芯片内置逻辑代码通过调用代码来实现小车转向避障的功能。循迹系统是利用激光发射机来实现信息传播,并通过激光发射器发射和接收信号,以此来对小车轨迹进行检测,为小车行驶的安全性提供基础保障。
3 结语
以往的智能小车受地理环境的影响较大,在复杂的环境工作时,很容易受到外界因素的影响。因此,本研究从硬件及软件两方面入手优化小车整体工作能力,让其在完成军事巡逻、搜索、监视等工作的同时,能传送更为清晰可靠的画面。另外,在车身结构方面也进行了优化设计,通过对独立悬挂装置的进一步优化,大大提高小车对不同地形的适应能力及行驶过程中的平稳性。解决传统智能小车在不规则地形工作时晃动大、不稳定的缺陷,从而让小车能更好地适应各种不规则的地形。此外,对小车的转向装置也进行了创新设计,采用平行四边形换向机构,使换向速度更快,换向过程更加平稳、更为高效,让其在多种地形参与探测、运输等工作时更为高效。